JP2012194792A - 数値制御工作機械 - Google Patents
数値制御工作機械 Download PDFInfo
- Publication number
- JP2012194792A JP2012194792A JP2011058331A JP2011058331A JP2012194792A JP 2012194792 A JP2012194792 A JP 2012194792A JP 2011058331 A JP2011058331 A JP 2011058331A JP 2011058331 A JP2011058331 A JP 2011058331A JP 2012194792 A JP2012194792 A JP 2012194792A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- moving body
- axis moving
- crowning
- controlled
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Automatic Control Of Machine Tools (AREA)
- Numerical Control (AREA)
Abstract
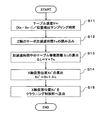
【解決手段】 ワーク10をテーブル11に保持し、テーブル11のX軸位置をX軸駆動機構12により制御する。砥石20を砥石主軸頭21に支持し、砥石主軸頭21のZ軸位置をZ軸サーボ機構22により制御する。クラウニングデータ記憶部5は、テーブル11のX軸位置に対応する砥石主軸頭21のZ軸位置を定義した加工形状データを記憶する。X軸仮想位置演算部6は、Z軸のサーボ加減速時間中におけるテーブル11の移動距離を算出し、この移動距離をテーブル11の現在位置に加算した地点にX軸仮想位置を求める。クラウニング制御部4は、X軸仮想位置に対応する砥石主軸頭21のZ軸位置を加工形状データより求め、Z軸補間演算部3を介してZ軸サーボ機構22に提供する。
【選択図】 図1
Description
L:ワーク長さ
PD:ワーク中心位置のクラウニング量
Xn:ワーク中心位置座標
4 クラウニング制御部
5 クラウニングデータ記憶部
6 X軸仮想位置演算部
10 ワーク
11 テーブル(X軸移動体)
12 X軸駆動機構
13 油圧シリンダ
20 砥石
21 砥石主軸頭(Z軸移動体)
22 Z軸サーボ機構
23 サーボモータ
31 数値制御平面研削盤(実施例2)
32 X軸仮想位置演算部
Claims (2)
- NC制御される第1軸移動体に工具を支持し、第1軸移動体に対して同期制御されない第2軸移動体にワークを保持した数値制御工作機械において、
第2軸移動体の位置に対する第1軸移動体の位置を定義した加工形状データを記憶する記憶手段と、第1軸移動体のサーボ加減速時間中における第2軸移動体の移動距離を算出し、該移動距離を第2軸移動体の現在位置に加算した地点に第2軸仮想位置を求める演算手段と、第2軸仮想位置に対する第1軸移動体の位置を前記加工形状データより求めて第1軸移動体の補間演算部に提供する制御手段とを備えたことを特徴とする数値制御工作機械。 - NC制御される第1軸移動体に工具を支持し、第1軸移動体に対して同期制御されない第2軸移動体にワークを保持した数値制御工作機械において、
第2軸移動体の位置に対する第1軸移動体の位置を定義した加工形状データを記憶する記憶手段と、第1軸移動体の制御遅れ時間中における第2軸移動体の移動距離を算出し、該移動距離を第2軸移動体の現在位置に加算した地点に第2軸仮想位置を求める演算手段と、第2軸仮想位置に対する第1軸移動体の位置を前記加工形状データより求めて第1軸移動体の位置フィードバックループに加算する制御手段とを備えたことを特徴とする数値制御工作機械。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011058331A JP5616262B2 (ja) | 2011-03-16 | 2011-03-16 | 数値制御工作機械 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011058331A JP5616262B2 (ja) | 2011-03-16 | 2011-03-16 | 数値制御工作機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012194792A true JP2012194792A (ja) | 2012-10-11 |
| JP5616262B2 JP5616262B2 (ja) | 2014-10-29 |
Family
ID=47086623
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011058331A Expired - Fee Related JP5616262B2 (ja) | 2011-03-16 | 2011-03-16 | 数値制御工作機械 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5616262B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110806721A (zh) * | 2019-10-11 | 2020-02-18 | 襄阳华中科技大学先进制造工程研究院 | 基于误差场特征点的三轴数控机床空间误差预测方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001027904A (ja) * | 1999-05-11 | 2001-01-30 | Fanuc Ltd | 数値制御システム |
| JP2003044144A (ja) * | 2001-08-02 | 2003-02-14 | Nissan Motor Co Ltd | 多軸同期制御装置、多軸同期制御方法および多軸同期制御プログラム |
| JP2003245824A (ja) * | 2002-02-21 | 2003-09-02 | Honda Motor Co Ltd | 歯車研削データ作成方法 |
-
2011
- 2011-03-16 JP JP2011058331A patent/JP5616262B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001027904A (ja) * | 1999-05-11 | 2001-01-30 | Fanuc Ltd | 数値制御システム |
| JP2003044144A (ja) * | 2001-08-02 | 2003-02-14 | Nissan Motor Co Ltd | 多軸同期制御装置、多軸同期制御方法および多軸同期制御プログラム |
| JP2003245824A (ja) * | 2002-02-21 | 2003-09-02 | Honda Motor Co Ltd | 歯車研削データ作成方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110806721A (zh) * | 2019-10-11 | 2020-02-18 | 襄阳华中科技大学先进制造工程研究院 | 基于误差场特征点的三轴数控机床空间误差预测方法 |
| CN110806721B (zh) * | 2019-10-11 | 2022-04-01 | 襄阳华中科技大学先进制造工程研究院 | 基于误差场特征点的三轴数控机床空间误差预测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5616262B2 (ja) | 2014-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103189807B (zh) | 工作机械的数值控制方法以及数值控制装置 | |
| JP6640816B2 (ja) | 加工システム | |
| JP5936178B2 (ja) | 工作機械の加工制御方法 | |
| CN103154839B (zh) | 进给轴反转时的补正方法 | |
| KR950007237B1 (ko) | 수치제어 이송장치 | |
| CN101689049B (zh) | 带有用于在复杂轨迹上连续运动的、冗余的、平动作用的轴的测量机或机床 | |
| JP5452788B1 (ja) | 数値制御装置 | |
| KR19990023831A (ko) | 위치제어장치와 그 방법, 수치제어 프로그램 작성장치와그 방법 및 수치제어 공작기계의 제어방법 | |
| JP2012088827A (ja) | 負荷イナーシャ推定方法及び制御パラメータ調整方法 | |
| WO2008053601A1 (en) | Working control device, and its program | |
| KR20130075768A (ko) | 연삭 가공반 및 연삭 가공 방법 | |
| JP5616262B2 (ja) | 数値制御工作機械 | |
| JPH0452908A (ja) | 工具変形量補正方式 | |
| JP5334932B2 (ja) | パラメータ設定方法およびパラメータ設定装置 | |
| TWI521318B (zh) | 熱補償裝置及方法 | |
| CN107077127B (zh) | 进给轴控制方法及数值控制机床 | |
| JP4542862B2 (ja) | ワーク搬送装置の駆動指令生成装置 | |
| WO2014002380A1 (ja) | 加工指令変換プログラム、記憶媒体及び加工指令変換装置 | |
| JP3646562B2 (ja) | 数値制御装置 | |
| JP4842903B2 (ja) | 数値制御装置及び数値制御方法 | |
| TWI598178B (zh) | Processing device and method of controlling the profiling using the same | |
| JPWO2018092221A1 (ja) | 工作機械の送り軸制御方法および送り軸制御装置 | |
| JP4599942B2 (ja) | 旋盤およびその刃先位置補正方法 | |
| JP4388534B2 (ja) | 工作機械の制振装置 | |
| US12271174B2 (en) | Numerical controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140617 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140811 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140902 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140911 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5616262 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |