JP2012184004A - 操船制御装置、自動操船制御システム、操船制御方法、及びプログラム - Google Patents
操船制御装置、自動操船制御システム、操船制御方法、及びプログラム Download PDFInfo
- Publication number
- JP2012184004A JP2012184004A JP2012150327A JP2012150327A JP2012184004A JP 2012184004 A JP2012184004 A JP 2012184004A JP 2012150327 A JP2012150327 A JP 2012150327A JP 2012150327 A JP2012150327 A JP 2012150327A JP 2012184004 A JP2012184004 A JP 2012184004A
- Authority
- JP
- Japan
- Prior art keywords
- ship
- maneuvering
- command value
- automatic
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 11
- 238000004364 calculation method Methods 0.000 claims abstract description 36
- 230000006870 function Effects 0.000 description 14
- 238000005259 measurement Methods 0.000 description 14
- 238000010586 diagram Methods 0.000 description 6
- 238000011161 development Methods 0.000 description 5
- 238000012937 correction Methods 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005315 distribution function Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images



Landscapes
- Traffic Control Systems (AREA)
Abstract
【解決手段】被曳航体4の位置又は曳索張力に関する情報が入力される入力部11と、被曳航体4の位置又は曳索張力に関する情報に基づき、自動操船装置20への指令値及び曳航装置50への指令値の少なくとも一方を求める指令値演算部12とを備えたものである。
【選択図】図5
Description
以下、実施の形態においては、自船以外の船舶(他船)や航走体、自船が曳航する被曳航体などと連携又は協調を図った制御を例として説明するが、本発明はこれに限るものでなく、この発明思想内における種々の変形をも含むことはいうまでもない。
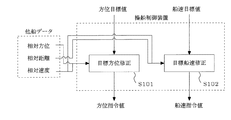
図1は実施の形態1に係る自動操船制御システムの構成図である。図1において、本実施の形態1における自動操船制御システムは、自動操船の対象となる船舶である自船1に搭載され、自船1を自動操船する自動操船装置20(後述)への指令値を出力する操船制御装置10と、この操船制御装置10から入力された指令値に基づき、自船1を自動操船する自動操船装置20と、指令値の補正に関する情報として、例えば海面を航行する他の船舶である他船2の位置に関する情報を取得し、操船制御装置10へ出力する観測・計測装置としての他船船位観測・計測装置30とにより構成されている。尚、他船2は、海面を航行する船舶に限らず、海面又は海中を航行する移動体であれば良い。
次に、操船制御装置10の指令値演算部12は、入力部11に入力された相対方位、相対距離、及び相対速度の情報に基づき、相対距離が所定範囲内となるように自動操船させる方位指令値及び船速指令値を求める。つまり、自船1が他船2に追従するような指令値を求める。例えば、相対方位及び相対速度を用いて、所定時間経過後における他船2の相対方位を予測し、当該相対方位を自動操船装置20への方位指令値とする(S101)。
また、相対速度及び相対距離を用いて、自船1と他船2との相対距離が所定範囲外である場合には、相対速度と相対距離に応じて船速を増速または減少するように船速を調節する船速指令値を出力する(S102)。
そして、自動操船装置20は、操船制御装置10から入力された、補正後の方位指令値及び船速指令値に基づき、自船1を自動操船する。
上記実施の形態1では、他船2に追従する操船制御を行ったが、本実施の形態2では、自船1により制御される航走体(後述)との協調を図った自船1の自動操船及び航走体の操縦制御を行う。
尚、上記実施の形態1と同様に、例えば観測・計測装置などにより、航走体3の相対方位、相対距離、及び相対速度を観測により求めて、当該情報を入力部11へ出力し、指令値演算部12は、入力された相対方位、相対距離、及び相対速度の情報に基づき、指令値を求めても良い。
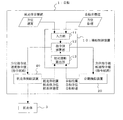
一方、航走体3への追従制御を行う場合においては、操船制御装置10は、自船1及び航走体3の位置に関する情報に基づき、入力された各目標値を補正した指令値を自動操船装置20及び航走体操縦装置40へ出力して、自船1が航走体3に追従するように、自船1及び航走体の少なくとも一方を制御する。このような本実施の形態2の動作について図4を用いて次に説明する。
次に、指令値演算部12は、相対運動算出部13により求められた相対方位、相対距離、及び相対速度の情報に基づき、自船1と航走体3との相対距離が所定範囲内となるように、自動操船装置20及び航走体操縦装置40への方位指令値及び船速指令値を求める(S202)。つまり、自船1が航走体3に追従するような指令値を求める。例えば、航走体3が自船1に対して先行し、且つ、自船1より速い速度で航走している場合には、航走体3の速度を減速させて自船1の船速を増速させる、又は航走体3のみを減速させる若しくは自船1のみを増速させるように、各目標値を補正する。また、例えば、相対方位と相対速度とを用いて、所定時間経過後における航走体3の相対方位を予測し、当該相対方位が船首方位又は船尾方位など所定方位と一致するように自動操船装置20や航走体操縦装置40への各目標値を補正する(S203〜S206)。
そして、自動操船装置20は、操船制御装置10から入力された、補正後の自船方位指令値及び自船船速指令値に基づき、自船1を自動操船する。また、航走体操縦装置40は、操船制御装置10から入力された、補正後の航走体方位指令値及び航走体速度指令値に基づき、航走体3を制御する。
即ち、自動操船装置20及び航走体操縦装置40と操船制御装置10との間での連携を考慮した制御が実現でき、より機能を拡張した高度な制御システムが構成できる。
上記実施の形態1又は2では、他船2又は航走体3に追従する操船制御を行ったが、本実施の形態3では、自船1により被曳航体(後述)を曳航する場合に、被曳航体の動きに合わせた操船制御を行う。
また、上記実施の形態1と同様に、例えば観測・計測装置などにより、被曳航体4の相対方位及び相対距離を観測により求めて当該情報を入力部11へ出力し、指令値演算部12は、入力された情報に基づき各指令値を求めても良い。
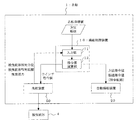
一方、曳航装置50により被曳航体4を曳航する場合においては、操船制御装置10は、曳航装置50からの情報に基づき、入力された目標値を補正した指令値、及び曳航装置50へのウインチ指令値を出力して、自船1及び曳航装置50の少なくとも一方を制御する。このような本実施の形態3の動作について図6を用いて次に説明する。
次に、操船制御装置10の指令値演算部12は、入力部11に入力された曳航装置50からの被曳航体4の相対方位及び相対距離の情報に基づき、自船1と被曳航体4との相対距離が所定距離内となるように、又は曳索張力の情報に基づき、曳索張力が所定範囲内となるように、自動操船装置20への方位指令値及び船速指令値、並びに曳航装置50へのウインチ指令値を求める(S301)。例えば、相対方位及び相対距離を用いて、被曳航体4が自船1の船尾方向で、且つ、所定距離の位置を航行するような、方位指令値及び船速指令値、並びにウインチ指令値とする(S302〜S304)。また例えば、曳索張力の情報を用いて、曳索張力が所定範囲を超える場合には、自船1の船速を減速させ、且つ曳航装置50のウインチを巻出し制御させる、又は自船1のみを減速させる若しくはウインチの巻だし制御のみをさせるように、各目標値を補正する(S302〜S304)。また、曳索張力が所定範囲を下回る場合には、自船1の船速を増速させ、且つ曳航装置50のウインチを巻取り制御させる、又は自船1のみを増速させる若しくはウインチの巻取り制御のみをさせるように、各目標値を補正する(S302〜S304)。尚、操船制御はこれに限らず、例えば、被曳航体4が所定の航路を曳航されるように各指令値を求めるなど、任意の操船制御を行うことが可能である。
Claims (8)
- 船舶を自動操船する自動操船装置への指令値、及び前記船舶に設けられ被曳航体を曳航する曳航装置への指令値を出力する操船制御装置であって、
前記被曳航体の位置又は曳索張力に関する情報が入力される入力手段と、
少なくとも前記被曳航体の位置又は曳索張力に関する情報に基づき、前記自動操船装置への指令値及び前記曳航装置への指令値の少なくとも一方を求める指令値演算手段と
を備えたことを特徴とする操船制御装置。 - 前記入力手段は、
前記被曳航体の位置に関する情報として、前記船舶と前記被曳航体との相対方位及び相対距離の情報が入力され、
前記指令値演算手段は、
前記相対方位及び前記相対距離の情報に基づき、前記船舶と前記被曳航体との相対距離が所定範囲内となるように、前記自動操船装置への方位指令値及び船速指令値並びに前記曳航装置へのウインチ指令値を求めることを特徴とする請求項1記載の操船制御装置。 - 前記指令値演算手段は、
前記曳索張力の情報に基づき、前記曳索張力が所定範囲内となるように、前記自動操船装置への方位指令値及び船速指令値、並びに前記曳航装置へのウインチ指令値を求めることを特徴とする請求項1又は2記載の操船制御装置。 - 前記指令値演算手段は、
前記入力手段に入力された情報が更新される度に、前記指令値を求めることを特徴とする請求項1〜3の何れかに記載の操船制御装置。 - 請求項1〜4の何れかに記載の操船制御装置と、
前記操船制御装置から入力された指令値に基づき、船舶を自動操船する自動操船装置と
を備えたことを特徴とする自動操船制御システム。 - 前記船舶に設けられ、前記操船制御装置から入力された指令値に基づき、被曳航体を曳航する曳航装置を更に備えたことを特徴とする請求項5記載の自動操船制御システム。
- 船舶を自動操船する自動操船装置、及び前記船舶に設けられ、被曳航体を曳航する曳航装置を制御する操船制御方法であって、
前記被曳航体の位置又は曳索張力に関する情報を取得するステップと、
少なくとも前記被曳航体の位置又は曳索張力に関する情報に基づき、前記自動操船装置及び前記曳航装置の少なくとも一方への指令値を求めるステップと、
該指令値の情報を該当する前記自動操船装置及び/又は前記曳航装置へ出力するステップと
を有することを特徴とする操船制御方法。 - 請求項7記載の操船制御方法をコンピュータに実行させることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012150327A JP5442071B2 (ja) | 2012-07-04 | 2012-07-04 | 操船制御装置、自動操船制御システム、操船制御方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012150327A JP5442071B2 (ja) | 2012-07-04 | 2012-07-04 | 操船制御装置、自動操船制御システム、操船制御方法、及びプログラム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007309709A Division JP2009132257A (ja) | 2007-11-30 | 2007-11-30 | 操船制御方法、プログラム及び装置、並びに自動操船制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012184004A true JP2012184004A (ja) | 2012-09-27 |
| JP5442071B2 JP5442071B2 (ja) | 2014-03-12 |
Family
ID=47014451
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012150327A Active JP5442071B2 (ja) | 2012-07-04 | 2012-07-04 | 操船制御装置、自動操船制御システム、操船制御方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5442071B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015182545A (ja) * | 2014-03-24 | 2015-10-22 | 五洋建設株式会社 | 被曳航体の曳航管理方法およびシステム |
| WO2018123948A1 (ja) * | 2016-12-28 | 2018-07-05 | 三井造船株式会社 | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 |
| JP2019510679A (ja) * | 2016-03-31 | 2019-04-18 | エー・ピー・モラー−マースク エー/エス | 転覆沈没防止システムを備えたタグボート |
| CN116482984A (zh) * | 2023-06-20 | 2023-07-25 | 中国船舶集团有限公司第七〇七研究所 | 基于船舶拖缆张力监测的模型自适应最优控制方法及系统 |
| EP3478565B1 (en) | 2016-07-01 | 2023-11-29 | Kongsberg Maritime AS | Dynamic tug winch control |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6833255B2 (ja) | 2013-11-18 | 2021-02-24 | ゼネラル・エレクトリック・カンパニイ | 一体型チューブインマトリックス熱交換器 |
| JP6864483B2 (ja) * | 2017-01-19 | 2021-04-28 | 東京計器株式会社 | 外乱推測装置 |
| EP4257471A4 (en) | 2020-12-04 | 2025-01-29 | Kawasaki Heavy Ind Ltd | SHIP PILOTING DEVICE AND SHIP PILOTING METHOD |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000095184A (ja) * | 1998-09-22 | 2000-04-04 | Mitsubishi Heavy Ind Ltd | 曳船の針路横振れ防止装置 |
| JP2002316697A (ja) * | 2001-04-20 | 2002-10-29 | Tech Res & Dev Inst Of Japan Def Agency | 船舶の航路保持制御方法及び装置並びに船舶 |
| JP2006199294A (ja) * | 2006-04-28 | 2006-08-03 | Tech Res & Dev Inst Of Japan Def Agency | 誘導制御装置、誘導制御システム、母船、誘導制御方法及びプログラム |
-
2012
- 2012-07-04 JP JP2012150327A patent/JP5442071B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000095184A (ja) * | 1998-09-22 | 2000-04-04 | Mitsubishi Heavy Ind Ltd | 曳船の針路横振れ防止装置 |
| JP2002316697A (ja) * | 2001-04-20 | 2002-10-29 | Tech Res & Dev Inst Of Japan Def Agency | 船舶の航路保持制御方法及び装置並びに船舶 |
| JP2006199294A (ja) * | 2006-04-28 | 2006-08-03 | Tech Res & Dev Inst Of Japan Def Agency | 誘導制御装置、誘導制御システム、母船、誘導制御方法及びプログラム |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015182545A (ja) * | 2014-03-24 | 2015-10-22 | 五洋建設株式会社 | 被曳航体の曳航管理方法およびシステム |
| JP2019510679A (ja) * | 2016-03-31 | 2019-04-18 | エー・ピー・モラー−マースク エー/エス | 転覆沈没防止システムを備えたタグボート |
| EP3478565B1 (en) | 2016-07-01 | 2023-11-29 | Kongsberg Maritime AS | Dynamic tug winch control |
| WO2018123948A1 (ja) * | 2016-12-28 | 2018-07-05 | 三井造船株式会社 | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 |
| JP2018103950A (ja) * | 2016-12-28 | 2018-07-05 | 株式会社三井E&Sホールディングス | 船舶の自動操縦システム、船舶、及び船舶の自動操縦方法 |
| CN116482984A (zh) * | 2023-06-20 | 2023-07-25 | 中国船舶集团有限公司第七〇七研究所 | 基于船舶拖缆张力监测的模型自适应最优控制方法及系统 |
| CN116482984B (zh) * | 2023-06-20 | 2023-09-05 | 中国船舶集团有限公司第七〇七研究所 | 基于船舶拖缆张力监测的模型自适应最优控制方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5442071B2 (ja) | 2014-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5442071B2 (ja) | 操船制御装置、自動操船制御システム、操船制御方法、及びプログラム | |
| US12017746B2 (en) | System and method for positioning a marine vessel | |
| CA3101609C (en) | Method, device and apparatus for autonomous docking of marine vessel | |
| JP6664171B2 (ja) | 船舶操縦装置 | |
| Tannuri et al. | Dynamic positioning systems: An experimental analysis of sliding mode control | |
| US10747226B2 (en) | Adaptive autopilot control systems and methods | |
| JP6479399B2 (ja) | 航行ルート生成装置、自動操舵システム及び航行ルート生成方法 | |
| US20120130570A1 (en) | System and method for a marine vessel autopilot | |
| CN112004741B (zh) | 用于控制拖曳船队的方法 | |
| JP2004042884A (ja) | 移動体の操縦方法及び装置 | |
| JP7249657B2 (ja) | 船舶の制御法 | |
| EP3526650B1 (en) | Method for automatically controlling the mooring maneuver of a boat with respect to an object and associated system | |
| Walmsness et al. | Automatic dock-to-dock control system for surface vessels using bumpless transfer | |
| JP2009132257A (ja) | 操船制御方法、プログラム及び装置、並びに自動操船制御システム | |
| JP5566426B2 (ja) | 操船制御装置、自動操船制御システム、操船制御方法、及びプログラム | |
| JP6658220B2 (ja) | 航走制御方法および装置 | |
| US20250153838A1 (en) | Uniaxial twin-rudder ship having automatic docking function | |
| JP3999976B2 (ja) | 操船方法及び装置 | |
| JP7598653B2 (ja) | 一軸二舵船の船位保持装置 | |
| JP7618502B2 (ja) | 船舶用自動操舵装置 | |
| JP2018131028A (ja) | 位置保持方法および移動体 | |
| KR101524153B1 (ko) | 해양 작업 시의 능동적 위치 제어 방법 | |
| JP2005247018A (ja) | 動揺制御処理方法及び装置、動揺制御システム並びに動揺制御処理方法のプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120704 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131217 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5442071 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |