JP2012173293A - 速度に依存する動的自動利得制御機能を有するセンサインタフェースの方法及びシステム - Google Patents
速度に依存する動的自動利得制御機能を有するセンサインタフェースの方法及びシステム Download PDFInfo
- Publication number
- JP2012173293A JP2012173293A JP2012033480A JP2012033480A JP2012173293A JP 2012173293 A JP2012173293 A JP 2012173293A JP 2012033480 A JP2012033480 A JP 2012033480A JP 2012033480 A JP2012033480 A JP 2012033480A JP 2012173293 A JP2012173293 A JP 2012173293A
- Authority
- JP
- Japan
- Prior art keywords
- voltage signal
- signal
- attenuated
- ended
- attenuated single
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/46—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring amplitude of generated current or voltage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/481—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals
- G01P3/487—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals delivered by rotating magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/481—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals
- G01P3/488—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals delivered by variable reluctance detectors
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Abstract
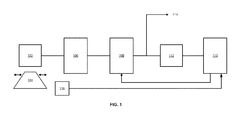
【解決手段】センサ102から交流差動電圧信号を受信し、第1の回路106で交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する。第2の回路108で減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングする。スケーリング係数は、速度センサ116の速度信号に応じて選択され、且つ、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択される。ターゲット104の速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように、センサ102の信号が動的にスケーリングされる。
【選択図】図1
Description
104 ターゲット
106 回路
108 第2の回路
110 FPGA又はデジタルプロセッサ
112 アナログデジタル変換器(ADC)
114 回路108の出力
116 速度センサ
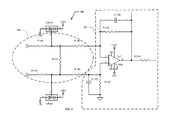
202 抵抗分割器
204 シングルエンデッド出力を有する演算増幅器
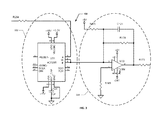
302 デジタルポテンショメータ
304 スケーリング演算増幅器回路
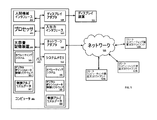
501 コンピュータ
502 人間機械インタフェース
503 プロセッサユニット
504 大容量記憶装置
505 オペレーティングシステム
506 デジタルポテンショメータ制御ソフトウェア
507 制御アルゴリズムデータ
508 ネットワークアダプタ
509 ディスプレイアダプタ
510 入出力インタフェース
511 ディスプレイ装置
512 システムメモリ
513 システムバス
514 1つ以上のリモートコンピューティング装置又はクライアント
515 ネットワーク
Claims (10)
- ターゲット(104)の速度変化に応じて振幅が変化する交流差動電圧信号をセンサ(102)から受信するステップと、
前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換するステップと、
前記ターゲット(104)の現在の速度を示す速度信号を受信するステップと、
前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって前記減衰済みシングルエンデッド電圧信号を動的にスケーリングするステップであって、前記スケーリング係数は、前記速度信号に応じて選択され、且つ、前記スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択されるステップと、
を含む方法。 - 前記交流差動電圧信号は、最大ピークツーピーク値を有しており、前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換することは、前記最大ピークツーピーク値に対する減衰済み最大電圧の比を前記交流差動電圧信号に乗じることを含む、請求項1に記載の方法。
- 前記交流差動電圧信号の前記最大ピークツーピーク値は、約250ボルトピークツーピークであり、前記減衰済みシングルエンデッド電圧信号の前記減衰済み最大電圧は、約30ボルトピークツーピークである、請求項2に記載の方法。
- 前記交流差動電圧信号を前記減衰済みシングルエンデッド電圧信号に変換する前記ステップは、前記減衰済みシングルエンデッド電圧信号が減衰済み最大電圧以下になるように、前記交流差動電圧信号を固定量だけ減衰させることを含む、請求項1から3のいずれかに記載の方法。
- 前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする前記ステップは、前記スケーリング係数と前記減衰済みシングルエンデッド電圧信号との積が最大入力信号電圧以下になるように前記スケーリング係数を選択することを含む、請求項1から4のいずれかに記載の方法。
- ターゲット(104)の速度変化に応じて振幅が変化する交流差動電圧信号を発生させるように構成されたセンサ(102)と、
前記交流差動電圧信号を受信し、前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する、第1の回路(106)と、
前記ターゲット(104)の現在の速度を示す速度信号を発生させる速度センサ(116)と、
前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることによって前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする第2の回路(108)であって、前記スケーリング係数は、前記速度信号に応じて選択され、且つ、前記スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比に応じて選択される、前記第2の回路(108)と、
を備えるシステム。 - 前記交流差動電圧信号は、最大ピークツーピーク値を有しており、前記第1の回路(106)は、前記最大ピークツーピーク値に対する減衰済み最大電圧の比を前記交流差動電圧信号に乗じるにより、前記交流差動電圧信号を減衰済みシングルエンデッド電圧信号に変換する、請求項6に記載の方法。
- 前記交流差動電圧信号の前記最大ピークツーピーク値は、約250ボルトピークツーピークであり、前記減衰済みシングルエンデッド電圧信号の前記減衰済み最大電圧は、約30ボルトピークツーピークである、請求項7に記載のシステム。
- 前記交流差動電圧信号を前記減衰済みシングルエンデッド電圧信号に変換する前記第1の回路(106)は、前記減衰済みシングルエンデッド電圧信号が減衰済み最大電圧以下になるように、前記交流差動電圧信号を固定量だけ減衰させる前記第1の回路(106)である、請求項6から8のいずれかに記載のシステム。
- 前記減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより前記減衰済みシングルエンデッド電圧信号を動的にスケーリングする前記第2の回路(108)は、前記スケーリング係数と前記減衰済みシングルエンデッド電圧信号との積が最大入力信号電圧以下になるように前記スケーリング係数を自動的に設定する、前記第2の回路(108)に関連付けられたフィールドプログラマブルゲートアレイ(FPGA)又はデジタルプロセッサ(110)を含む、請求項6から9のいずれかに記載のシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/033,234 US8836322B2 (en) | 2011-02-23 | 2011-02-23 | Method and system of a sensor interface having dynamic automatic gain control dependent on speed |
| US13/033,234 | 2011-02-23 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012173293A true JP2012173293A (ja) | 2012-09-10 |
| JP2012173293A5 JP2012173293A5 (ja) | 2015-04-09 |
Family
ID=45656260
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012033480A Pending JP2012173293A (ja) | 2011-02-23 | 2012-02-20 | 速度に依存する動的自動利得制御機能を有するセンサインタフェースの方法及びシステム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8836322B2 (ja) |
| EP (1) | EP2492694B1 (ja) |
| JP (1) | JP2012173293A (ja) |
| CN (1) | CN102650529A (ja) |
| AU (1) | AU2012200971B2 (ja) |
| CA (1) | CA2768436C (ja) |
| DK (1) | DK2492694T3 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8656761B2 (en) * | 2011-05-27 | 2014-02-25 | General Electric Company | Systems and methods for use in providing a sensor signal independent of ground |
| US8963615B1 (en) | 2013-01-31 | 2015-02-24 | General Electric Company | Automatic bipolar signal switching |
| CN103647913A (zh) * | 2013-12-24 | 2014-03-19 | 中国科学院半导体研究所 | 基于fpga的多通道高速图像数据采集和存储系统 |
| US10389507B2 (en) * | 2015-10-20 | 2019-08-20 | Analog Devices Global | System for power transfer and duplex communication via single isolation device |
| WO2018190873A1 (en) * | 2017-04-14 | 2018-10-18 | Hewlett-Packard Development Company, L.P. | Input power scaling of power supply devices |
| FR3067889B1 (fr) * | 2017-06-14 | 2019-06-28 | Safran Aircraft Engines | Procede de mesure de vitesse de rotation d'un arbre de turbomachine tenant compte du bruit de mesure |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003240601A (ja) * | 2002-01-29 | 2003-08-27 | Goodrich Pump & Engine Control Systems Inc | 信号処理のシステムと方法 |
| JP2005106761A (ja) * | 2003-10-02 | 2005-04-21 | Bridgestone Corp | コンベアベルトの伸び測定方法および伸び測定装置。 |
| JP2005308743A (ja) * | 2004-04-16 | 2005-11-04 | General Electric Co <Ge> | ギャップ及び誘電媒体の非接触測定のための容量性センサ及び方法 |
| JP2007525673A (ja) * | 2004-06-16 | 2007-09-06 | エーエムアイ セミコンダクター インク | Pade’近似を基にした補償を使用し励起供給モジュールを備える反応性センサ |
| WO2010025017A1 (en) * | 2008-08-29 | 2010-03-04 | General Electric Company | System and method for sensing the periodic position of an object |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1090143A (en) * | 1965-04-07 | 1967-11-08 | Hawker Siddeley Dynamics Ltd | Improvements in or relating to electrical control systems for engines |
| US5510706A (en) * | 1994-02-22 | 1996-04-23 | Delco Electronics Corporation | Differential to single-ended conversion circuit for a magnetic wheel speed sensor |
| US5477142A (en) | 1994-02-22 | 1995-12-19 | Delco Electronics Corporation | Variable reluctance sensor interface using a differential input and digital adaptive control |
| JP3223750B2 (ja) * | 1995-03-31 | 2001-10-29 | 株式会社日立製作所 | 出力制御電力増幅器、無線通信端末及び無線通信基地局 |
| DE19710359B4 (de) * | 1997-03-13 | 2006-05-11 | Robert Bosch Gmbh | Vorrichtung zur Ermittlung einer Bewegungsgröße mit automatischer Schalenfaktornachführung |
| US6133728A (en) | 1998-05-18 | 2000-10-17 | Delco Electronics Corporation | Current mode differential to single-ended conversion circuit for a magnetic wheel speed sensor |
| US6040692A (en) * | 1998-05-18 | 2000-03-21 | Delco Electronics Corporaiton | Variable attenuation circuit for a differential variable reluctance sensor using current mode |
| US6674279B2 (en) * | 2002-05-09 | 2004-01-06 | Delphi Technologies, Inc. | Variable attenuation circuit for a differential variable reluctance sensor with enhanced initial threshold accuracy |
| US7498886B2 (en) * | 2006-01-27 | 2009-03-03 | Via Technologies, Inc. | Clock distribution system and method thereof |
| US7739014B2 (en) * | 2006-08-30 | 2010-06-15 | Ford Global Technolgies | Integrated control system for stability control of yaw, roll and lateral motion of a driving vehicle using an integrated sensing system to determine a final linear lateral velocity |
| US8346100B2 (en) * | 2009-10-12 | 2013-01-01 | Avago Technologies Fiber Ip (Singapore) Pte. Ltd | Apparatus and method for monitoring received optical power in an optical receiver over a wide range of received power with high accuracy |
-
2011
- 2011-02-23 US US13/033,234 patent/US8836322B2/en active Active
-
2012
- 2012-02-16 CA CA2768436A patent/CA2768436C/en active Active
- 2012-02-20 AU AU2012200971A patent/AU2012200971B2/en active Active
- 2012-02-20 JP JP2012033480A patent/JP2012173293A/ja active Pending
- 2012-02-21 DK DK12156300T patent/DK2492694T3/en active
- 2012-02-21 EP EP20120156300 patent/EP2492694B1/en active Active
- 2012-02-23 CN CN2012100576464A patent/CN102650529A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003240601A (ja) * | 2002-01-29 | 2003-08-27 | Goodrich Pump & Engine Control Systems Inc | 信号処理のシステムと方法 |
| JP2005106761A (ja) * | 2003-10-02 | 2005-04-21 | Bridgestone Corp | コンベアベルトの伸び測定方法および伸び測定装置。 |
| JP2005308743A (ja) * | 2004-04-16 | 2005-11-04 | General Electric Co <Ge> | ギャップ及び誘電媒体の非接触測定のための容量性センサ及び方法 |
| JP2007525673A (ja) * | 2004-06-16 | 2007-09-06 | エーエムアイ セミコンダクター インク | Pade’近似を基にした補償を使用し励起供給モジュールを備える反応性センサ |
| WO2010025017A1 (en) * | 2008-08-29 | 2010-03-04 | General Electric Company | System and method for sensing the periodic position of an object |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2492694A1 (en) | 2012-08-29 |
| CA2768436C (en) | 2018-07-03 |
| DK2492694T3 (en) | 2014-02-24 |
| AU2012200971B2 (en) | 2015-01-22 |
| CN102650529A (zh) | 2012-08-29 |
| AU2012200971A1 (en) | 2012-09-06 |
| EP2492694B1 (en) | 2013-12-25 |
| US8836322B2 (en) | 2014-09-16 |
| CA2768436A1 (en) | 2012-08-23 |
| US20120212277A1 (en) | 2012-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012211581A (ja) | 動的自動利得制御機能を有するセンサインタフェースの方法及びシステム | |
| Cakir et al. | The experimental application of popular machine learning algorithms on predictive maintenance and the design of IIoT based condition monitoring system | |
| JP2012173293A (ja) | 速度に依存する動的自動利得制御機能を有するセンサインタフェースの方法及びシステム | |
| EP2461222B1 (en) | Method and system for detection of machine operation state for monitoring purposes | |
| KR20200081213A (ko) | 햅틱 신호 변환 시스템 | |
| Qu et al. | Complex frequency identification using real modal shapes for a structure with proportional damping | |
| Bianchi et al. | Demonstration of a stall detection system for induced draft fans | |
| JP2015102402A (ja) | タービンブレード振動変位評価方法及び装置 | |
| WO2012099022A1 (ja) | 過渡回復電圧測定装置、過渡回復電圧測定方法及び過渡回復電圧測定プログラム | |
| US10845792B2 (en) | Failure diagnosis apparatus, monitoring apparatus, failure diagnosis method and recording medium | |
| US11592455B2 (en) | Adaptive voltage threshold for turbine engine | |
| Guo et al. | Fault diagnosis for sensors in a class of nonlinear systems | |
| Murray III et al. | Detection of rotor forced response vibrations using stationary pressure transducers in a multistage axial compressor | |
| WO2019210459A1 (en) | Reverse detection for rotating machinery | |
| US20240272632A1 (en) | Method and System for Operating a Technical Device with a Model Based on Artificial Intelligence | |
| JP2013033477A (ja) | 電力システム内の故障を識別するためのデータを提示するコンピュータデバイスおよび方法 | |
| CN109084891A (zh) | 一种基于受力变化的旋转体噪声测试系统及测试方法 | |
| Schulze et al. | Experimental examination of an axial compressor as a basis for an active stall avoidance system | |
| Geng et al. | Analysis method of MSCSG rotor deflection signal based on windowed interpolation FFT | |
| EP4231020A1 (en) | Sensing systems | |
| WO2023132235A1 (ja) | 振動監視装置、過給機、及び振動監視方法 | |
| Kirana | The Design of Tachometer Contact and Non-Contact Using Microcontroller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150218 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151222 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160517 |