JP2012159109A - 外力検出が可能な防振装置 - Google Patents
外力検出が可能な防振装置 Download PDFInfo
- Publication number
- JP2012159109A JP2012159109A JP2011017619A JP2011017619A JP2012159109A JP 2012159109 A JP2012159109 A JP 2012159109A JP 2011017619 A JP2011017619 A JP 2011017619A JP 2011017619 A JP2011017619 A JP 2011017619A JP 2012159109 A JP2012159109 A JP 2012159109A
- Authority
- JP
- Japan
- Prior art keywords
- external force
- elastic body
- rubber elastic
- main rubber
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Abstract
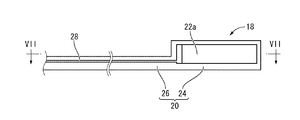
【解決手段】誘電性の弾性材からなる誘電体層20の両面に対して導電性の弾性材からなる一対の電極膜22,22を設けた静電容量型センサ18が、第1の取付部材12と第2の取付部材14の間への外力作用に際しての本体ゴム弾性体16への引張力の作用方向に伸びる状態で配設されて、本体ゴム弾性体16に固着されている。
【選択図】図1
Description
Claims (10)
- 第1の取付部材と第2の取付部材が本体ゴム弾性体で連結された防振装置において、
誘電性の弾性材からなる誘電体層の両面に対して導電性の弾性材からなる一対の電極膜を設けた静電容量型センサを用いて、前記第1の取付部材と前記第2の取付部材の間への外力作用に際しての前記本体ゴム弾性体への引張力の作用方向に伸びる状態で該静電容量型センサを配し、該静電容量型センサを該本体ゴム弾性体に固着したことを特徴とする外力検出が可能な防振装置。 - 前記第1の取付部材としてのインナ軸部材に前記第2の取付部材としてのアウタ筒部材が外挿されており、それらインナ軸部材とアウタ筒部材の間に前記本体ゴム弾性体が配設されていると共に、それらインナ軸部材とアウタ筒部材の対向方向に伸びる状態で前記静電容量型センサが配設されている請求項1に記載の外力検出が可能な防振装置。
- 前記静電容量型センサが前記本体ゴム弾性体の軸方向端面に固着されている請求項2に記載の外力検出が可能な防振装置。
- 前記本体ゴム弾性体の軸方向両側の端面において、前記インナ軸部材を径方向に挟んで配置された一対の前記静電容量型センサと、該インナ軸部材を他の径方向で挟んで配置された他の一対の該静電容量型センサとが、配設されている請求項2又は3に記載の外力検出が可能な防振装置。
- 前記本体ゴム弾性体における軸方向で所定距離を隔てた位置に、それぞれ、こじり方向の外力の入力に伴う引張変形側と圧縮変形側とで対となるように前記静電容量型センサが配設されている請求項2〜4の何れか1項に記載の外力検出が可能な防振装置。
- 前記本体ゴム弾性体において、前記インナ軸部材の中心軸をとおる径方向線に対して周方向一方の側に偏倚させた位置と周方向他方の側に偏倚させた位置とで対となるように前記静電容量型センサが配設されている請求項2〜5の何れか1項に記載の外力検出が可能な防振装置。
- 前記静電容量型センサが、前記インナ軸部材の中心軸に直交する平面に対して該インナ軸部材の中心軸回りの周方向における傾斜角を有している請求項2〜5の何れか1項に記載の外力検出が可能な防振装置。
- 前記本体ゴム弾性体の表面に対して前記静電容量型センサが固着されていると共に、該静電容量型センサを被覆する保護層が絶縁性の弾性材で形成されている請求項1〜7の何れか1項に記載の外力検出が可能な防振装置。
- 前記一対の電極膜がゴム系導電インクによって形成されている請求項1〜8の何れか1項に記載の外力検出が可能な防振装置。
- 前記誘電体層と一対の電極膜が何れも10%以上の伸縮変形を許容される弾性材によって形成されている請求項1〜9の何れか1項に記載の外力検出が可能な防振装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011017619A JP5578728B2 (ja) | 2011-01-31 | 2011-01-31 | 外力検出が可能な防振装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011017619A JP5578728B2 (ja) | 2011-01-31 | 2011-01-31 | 外力検出が可能な防振装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012159109A true JP2012159109A (ja) | 2012-08-23 |
| JP5578728B2 JP5578728B2 (ja) | 2014-08-27 |
Family
ID=46839824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011017619A Active JP5578728B2 (ja) | 2011-01-31 | 2011-01-31 | 外力検出が可能な防振装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5578728B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015178845A (ja) * | 2014-03-18 | 2015-10-08 | キヤノン株式会社 | 振動低減装置、リソグラフィ装置、および物品の製造方法 |
| CN110987271A (zh) * | 2019-12-19 | 2020-04-10 | 华南理工大学 | 一种测量汽车悬架衬套连接处载荷的三分力传感器 |
| JP2021105625A (ja) * | 2016-12-22 | 2021-07-26 | テルモ株式会社 | 圧力センサおよび体外循環装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6527491B2 (ja) * | 2016-07-26 | 2019-06-05 | 住友理工株式会社 | 弾性連結装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63134321A (ja) * | 1986-11-25 | 1988-06-06 | Nippon Denso Co Ltd | 車両用姿勢検出装置 |
| JP2001281075A (ja) * | 2000-03-29 | 2001-10-10 | Furukawa Electric Co Ltd:The | 静電容量型荷重センサー |
| JP2004270832A (ja) * | 2003-03-10 | 2004-09-30 | Advics:Kk | サスペンション用防振装置およびそれを用いたサスペンション機構 |
| JP2006076433A (ja) * | 2004-09-09 | 2006-03-23 | Tokai Rubber Ind Ltd | サブフレーム機構および該サブフレーム機構に用いられるゴムマウント |
| JP2006138812A (ja) * | 2004-11-15 | 2006-06-01 | Tokai Rubber Ind Ltd | ひずみ計による防振ゴム作用力測定装置とそれを用いた自動車用サスペンション機構。 |
| JP2006329236A (ja) * | 2005-05-23 | 2006-12-07 | Tokai Rubber Ind Ltd | 筒形防振装置 |
| JP2009078619A (ja) * | 2007-09-25 | 2009-04-16 | Toyota Motor Corp | サスペンションブッシュ |
| JP2010043880A (ja) * | 2008-08-08 | 2010-02-25 | Tokai Rubber Ind Ltd | 静電容量型センサ |
-
2011
- 2011-01-31 JP JP2011017619A patent/JP5578728B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63134321A (ja) * | 1986-11-25 | 1988-06-06 | Nippon Denso Co Ltd | 車両用姿勢検出装置 |
| JP2001281075A (ja) * | 2000-03-29 | 2001-10-10 | Furukawa Electric Co Ltd:The | 静電容量型荷重センサー |
| JP2004270832A (ja) * | 2003-03-10 | 2004-09-30 | Advics:Kk | サスペンション用防振装置およびそれを用いたサスペンション機構 |
| JP2006076433A (ja) * | 2004-09-09 | 2006-03-23 | Tokai Rubber Ind Ltd | サブフレーム機構および該サブフレーム機構に用いられるゴムマウント |
| JP2006138812A (ja) * | 2004-11-15 | 2006-06-01 | Tokai Rubber Ind Ltd | ひずみ計による防振ゴム作用力測定装置とそれを用いた自動車用サスペンション機構。 |
| JP2006329236A (ja) * | 2005-05-23 | 2006-12-07 | Tokai Rubber Ind Ltd | 筒形防振装置 |
| JP2009078619A (ja) * | 2007-09-25 | 2009-04-16 | Toyota Motor Corp | サスペンションブッシュ |
| JP2010043880A (ja) * | 2008-08-08 | 2010-02-25 | Tokai Rubber Ind Ltd | 静電容量型センサ |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015178845A (ja) * | 2014-03-18 | 2015-10-08 | キヤノン株式会社 | 振動低減装置、リソグラフィ装置、および物品の製造方法 |
| JP2021105625A (ja) * | 2016-12-22 | 2021-07-26 | テルモ株式会社 | 圧力センサおよび体外循環装置 |
| JP7035250B2 (ja) | 2016-12-22 | 2022-03-14 | テルモ株式会社 | 圧力センサおよび体外循環装置 |
| CN110987271A (zh) * | 2019-12-19 | 2020-04-10 | 华南理工大学 | 一种测量汽车悬架衬套连接处载荷的三分力传感器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5578728B2 (ja) | 2014-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5496446B2 (ja) | 静電容量型センサ | |
| JP5568206B2 (ja) | 変形センサ | |
| EP1901311B1 (en) | Crosslinked elastomer body | |
| JP5578728B2 (ja) | 外力検出が可能な防振装置 | |
| WO2012060427A1 (ja) | 曲げセンサ | |
| US9469167B2 (en) | Vehicle pneumatic tire having a sealing material on the inside of the tire | |
| WO2008026305A1 (en) | Sensor-equipped bearing for wheel | |
| JP5807105B2 (ja) | 高分子スピーカ | |
| WO2015040801A1 (ja) | 感圧センサ用導電部材及び感圧センサ | |
| KR20180122425A (ko) | 부품의 순간 변형을 검출하기 위한 센서 장치, 측정 장치 및 방법, 그리고 자동차 | |
| JP2004177411A (ja) | 変形状態における力を測定するために装着されたサスペンション制御装置 | |
| JP2007271620A (ja) | カーカスプライとインナーライナとの間に配置されたセンサを備えたタイヤ | |
| JP2016540474A (ja) | 複数の架線における摩耗監視のための装置 | |
| EP3715661B1 (en) | Improved anti-squeal shim | |
| JP5578729B2 (ja) | 外力検出が可能な防振装置 | |
| JP4415390B2 (ja) | 筒形防振装置 | |
| JP6527491B2 (ja) | 弾性連結装置 | |
| JP4347784B2 (ja) | ひずみ計による防振ゴム作用力測定装置とそれを用いた自動車用サスペンション機構 | |
| JP2008107199A (ja) | 車両の外装部材変形センサ | |
| CN104023496A (zh) | 用于车辆的电子控制单元 | |
| JP5085298B2 (ja) | 導電複合粒子、エラストマー複合材料、および変形センサ | |
| JP5420819B2 (ja) | 衝撃センサ | |
| JP2009174955A (ja) | ケーブル型荷重センサ | |
| CN206877199U (zh) | 踏板控制变送器 | |
| WO2022195919A1 (ja) | 歪み量検出装置、タイヤ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140409 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140602 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140617 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140707 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5578728 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |