JP2011507463A - 電気制御部材を流れる電流又は電気制御部材の端子間の電圧を制御する回路 - Google Patents
電気制御部材を流れる電流又は電気制御部材の端子間の電圧を制御する回路 Download PDFInfo
- Publication number
- JP2011507463A JP2011507463A JP2010536504A JP2010536504A JP2011507463A JP 2011507463 A JP2011507463 A JP 2011507463A JP 2010536504 A JP2010536504 A JP 2010536504A JP 2010536504 A JP2010536504 A JP 2010536504A JP 2011507463 A JP2011507463 A JP 2011507463A
- Authority
- JP
- Japan
- Prior art keywords
- state
- duty cycle
- switch
- voltage
- switches
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000008859 change Effects 0.000 claims description 31
- 230000007704 transition Effects 0.000 claims description 23
- 239000003990 capacitor Substances 0.000 claims description 14
- 238000000034 method Methods 0.000 claims description 14
- 230000001939 inductive effect Effects 0.000 claims description 10
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 230000033228 biological regulation Effects 0.000 description 35
- 238000005259 measurement Methods 0.000 description 15
- 230000007423 decrease Effects 0.000 description 12
- 238000012546 transfer Methods 0.000 description 8
- 230000003068 static effect Effects 0.000 description 7
- 230000003321 amplification Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 5
- 230000000295 complement effect Effects 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 5
- 238000003199 nucleic acid amplification method Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 230000005347 demagnetization Effects 0.000 description 4
- 238000000691 measurement method Methods 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 230000005415 magnetization Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000011217 control strategy Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000005670 electromagnetic radiation Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 230000036039 immunity Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images






















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
- H02M7/5387—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration
- H02M7/53871—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration with automatic control of output voltage or current
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Direct Current Motors (AREA)
- Inverter Devices (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
【解決手段】 電気制御部材(110)において電流を制御するための回路300であって、電気制御部材(110)は、4つの端子(105,106,107,108)備えるブリッジと、4つの制御スイッチ(AH,AL,BH,BL)と、電源(109)と、4つのスイッチのうち少なくとも2つのスイッチに対するPWM制御手段とを備えている。制御回路は、第1のスイッチ(AH)及び第4のスイッチ(BL)は閉じており、第2のスイッチ(BH)及び第3のスイッチ(AL)は開いている第1の状態、第2のスイッチ(BH)及び第3のスイッチ(AL)は閉じており、第1のスイッチ(AH)及び第4のスイッチ(BL)は開いている第2の状態、及び次の2つの状態のうち少なくとも1つの状態であることを示す。すなわち、第3のスイッチ(AL)及び第4のスイッチ(BL)は閉じており、第1のスイッチ(AH)及び第2のスイッチ(BH)は開いている第3の状態、及び/又は第1のスイッチ(AH)及び第2のスイッチ(BH)は閉じており、第3のスイッチ(AL)及び第4のスイッチ(BL)は開いている第4の状態とである。
【選択図】図8
Description
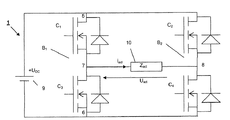
− 4端子5,6,7及び8、
− ブリッジ1の第1及び第2端子5及び6に接続されたDC電源9(これは、例えば、バッテリー、DC−DCパワーコンバータ、又はAC−DCパワーコンバータである)、
− アクチュエータを制御するために用いられ、ブリッジ回路1の第3及び第4の端子7及び8の間に接続されている(可変インダクタンスによる電気的負荷のような)電子制御部材10、
− 第1及び第3の端子5及び7の間に接続されている第1スイッチC1、
− 第1及び第4の端子5及び8の間に接続されている第2スイッチC2、
− 第2及び第3の端子6及び7の間に接続されている第3スイッチC3、
− 第2及び第4の端子6及び8の間に接続される第4スイッチC4。

− スイッチBH及びALが閉じており、スイッチAH及びBLが開いている磁化状態(アクチュエータに適用される電圧VL=+Udc)。
− スイッチBH及びALが開いており、スイッチAH及びBLが閉じている消磁状態(アクチュエータに適用される電圧VL=−Udc)。
− 4つの端子と、4つの制御スイッチを備えるブリッジと、
− ブリッジのための電源と、
− パルス幅変調によって4つのスイッチのうち少なくとも2つを制御する手段
とを備え、
電源は、ブリッジの第1の端子及び第2の端子の間で接続され、
電気制御部材は、ブリッジの第3の端子及び第4の端子の間で接続され、
第1のスイッチは、ブリッジの第1の端子及び第3の端子の間で接続され、
第2のスイッチは、ブリッジの第1の端子及び第4の端子の間で接続され、
第3のスイッチは、ブリッジの第3の端子及び第2の端子の間で接続され、
第4のスイッチは、ブリッジの第4の端子及び第2の端子の間で接続されており、
制御回路は、
− 第1の状態は、第1及び第4のスイッチが閉じ、第2及び第3のスイッチが開いており、
− 第2の状態は、前記第2及び第3のスイッチが閉じ、前記第1及び第4のスイッチが開いており、
− 以下の2つの状態のうちの少なくとも1つであり、
○第3の状態は、第3及び第4のスイッチが閉じ、第1及び第2のスイッチが開いており、
○第4の状態は、第1及び第2のスイッチが閉じ、第3及び第4のスイッチが開いていることを特徴とし、
パルス幅変調制御手段は、
− 第1の状態から、第3又は第4の状態のうち少なくとも1つの状態への遷移、
− 第2の状態から、第3又は第4の状態のうち少なくとも1つの状態への遷移、
− 第3又は第4の状態のうち少なくとも1つの状態から、第1の状態への遷移、
− 第3又は第4の状態のうち少なくとも1つの状態から、第2の状態への遷移
を許すことを特徴とする回路を提供するものである。
− 既存のパワーエレクトロニクスの信頼性における改善。
− 使用される構成部品の小型化。
− コストの削減。
− 第1の、いわゆる、負の交番フェーズは、第1の状態から第3の状態への遷移、第3の状態から第1へ状態への遷移を許容し、第1及び第3の切り替えは第1のレッグ、いわゆる、振幅レッグを形成し、いわゆる、一定間隔ごとに断続する周波数で切り替わり、第2及び第4のトランジスタは、符号レッグと呼ばれる第2のレッグを形成し、それぞれのレッグは閉じており、開いている。
− 第2の、いわゆる、正の交番フェーズは、第2の状態から第4の状態への遷移、第4の状態から第1への遷移を許容し、第1及び第3のスイッチは、いわゆる、一定間隔ごとに断続する周波数で切り替わり、前記第2(BH)及び第4(BL)のスイッチも同様に切り替わり、符号レッグの第2及び第4のスイッチの切り替えは、一定間隔ごとに断続する周波数未満の周波数において、負及び正の交番間の遷移を確実にする。
− 充電された際に、第2のスイッチに対して制御電圧を供給するのに適するチャージポンプキャパシタ。
−第1の電源から供給される電圧よりも少ない電圧を供給する第2の電源であって、第4のスイッチが閉じている際、チャージポンプキャパシタを充電するのに適する第2の電源。
−チャージポンプキャパシタが第2の電源から再充電されるために制御回路が正の交番フェーズにあるとき、第4の状態から第3の状態への遷移を強いるための手段。
− 負荷サイクルαを有するパルス幅変調信号を生成するための手段。
− 負荷サイクルαを有するパルス幅変調信号を第3のトランジスタに適用し、負荷サイクル1−αを有するパルス幅変調信号を第1のトランジスタに適用するための手段。
− 次のような状態を実現するために、正及び負の交番フェーズの間を通過するための手段であって、
○ブリッジが正の交番フェーズにあり、負荷サイクルαが取り消されるとき、装置は状態の変化を検出し、正の交番フェーズに変更し、
○ブリッジが負の交番フェーズにあり、負荷サイクルαが100%に等しいとき、装置は状態の変化を検出し、正の交番フェーズに変更するようになっているもの。
− 正の交番フェーズの間、積α×UDCに等しい平均電圧を電気制御部材に適用するための手段。
− 負の交番フェーズの間、(α―1)×UDCと等しい平均電圧を電気制御部材に適用するための手段。
− 負荷サイクルαを有するパルス幅変調信号を生成するための手段。
− 負荷サイクルαを有するパルス幅変調信号を、負荷サイクルα´=│2α―1│を有するパルス幅変調信号に変換するための手段。
− 負荷サイクルα´を有するパルス幅変調信号を第3のトランジスタ(AL)に適用し、正の交番フェーズの間、負荷サイクル1−α´を有するパルス幅変調信号を第1のトランジスタ(AH)に適用するための手段。
− 負荷サイクル1−α´を有するパルス幅変調信号を第3のトランジスタ(AL)に適用し、負の交番フェーズの間、負荷サイクルα´を有するパルス幅変調信号を第1のトランジスタ(AH)に適用するための手段。
− 次の状態の装置を実装する正及び負の交番フェーズの間を通過させるための手段であって、
○ブリッジが正の交番フェーズにあり、負荷サイクルαが正確に50%未満であるとき、装置は状態の変化を検出し、負の交番フェーズに変更し、
○ブリッジが負の交番フェーズにあり、負荷サイクルαが50%以上であるとき、装置は状態の変化を検出し、正の交番フェーズに変更するようになっているもの。
− 負荷サイクルが50%に等しい信号及び負荷サイクルαの信号の間で減算を実行するための手段と、
− 減算によって得られる信号を倍増させるための手段とを備えていると有利である。
− 4つの端子105,106,107及び108と、
− 例えば、電池又はブリッジ1の第1の端子105及び第2の端子106間で接続されるDC−DC電力変換装置(又は、AC−DC電力変換装置)である、電圧+UDCを供給するDC電源109と、
− アクチュエータを制御するための誘導負荷のようであり、第3の端子107及び第4の端子108間で接続される電気制御部材110と、
− 第1の端子105及び第3の端子107の間で接続される第1のスイッチAHと、
− 第1の端子105及び第4の端子108の間で接続される第2のスイッチBHと、
− 第2の端子106及び第3の端子107の間で接続される第3のスイッチALと、
− 第2の端子106及び第4の端子108の間で接続される第4のスイッチBL
とを備えている。
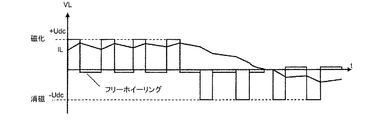
− 磁化状態は、トランジスタBH及びALが閉じており、トランジスタAH及びBLが開いている場合に相当する。この場合、負荷110の端子に適用される電圧VLは電圧+UDCである。
− フリーホイーリング状態は、トランジスタAL及びBLが閉じており、トランジスタAH及びBHが開いている状態に相当する。この状態は、下記で“低”フリーホイーリング状態と呼ばれる。これは、ここでは示されていない別のフリーホイーリング状態である“高”フリーホイーリング状態と呼ばれる状態と対比される。“高”フリーホイーリング状態は、トランジスタAH及びBHが閉じており、トランジスタAL及びBLが開いている状態である。高又は低フリーホイーリングの場合、負荷110の端子に適用される電圧VLは電圧0である。
− 消磁状態は、トランジスタAH及びBLが閉じており、トランジスタAL及びBHが開いている状態に相当する。この場合、負荷110の端子に適用される電圧VLは電圧−UDCである。
− “正の交番”という用語は、制御回路300が、スイッチAH,AL,BH及びBLを切り替える際、負荷110によって観察される平均電圧が正であるために、適用する。
− “負の交番”という用語は、制御回路がスイッチを切り替える際、負荷110によって観察される平均電圧が負であるために、適用する。正の平均電圧は、負荷において正の電流ILを導くこととなる。
− 主電源からの電圧UDCよりも低い電圧(通常、12〜15Vの順序によって、MOSFETトランジスタのゲートを制御するために使用される標準的な値に対応するこれらの電圧値)を供給する補助電源装置501。
− そのアノードが補助電源装置501に連結されているダイオード502。
− ダイオード502のカソードに連結される第1の端子、及びトランジスタBH、及びBLの共通端子に連結される第2の端子を有するキャパシタ503。
−ダイオード502のカソードに連結される第1の端子及びトランジスタBHのゲートに連結される第2の端子を有する第1のスイッチ504。
− 第1のスイッチ504の第2の端子に連結し、そのため、トランジスタBHのゲートに連結する第1の端子、及びトランジスタBH及びBLの共通端子に連結される第2の端子を有する第2のスイッチ505。
− 相殺器601。
− 増幅器602。
− 負荷サイクルαを有するPWM(パルス幅変調)信号の発生器603。
− 細断された電圧を負荷(通常、誘導負荷)605に供給するために、測定電流Imesは、ループ600によって閉ざされた電流を形成している、フォー・クオドラントブリッジ604。
− 相殺器701。
− 増幅器702。
− 負荷サイクルαを有するPWM(パルス幅変調)信号の発生器703。
− 正の交番状態705又は負の交番状態706において、細断された電圧を負荷(通常、誘導負荷)707に供給し、その測定された電流Imesがループ700によって閉ざされた電流を形成するフォー・クオドラントブリッジ。
− 正の交番705及び負の交番706の間で変化させるための制御手段708。
− ブリッジが正の交番705にあり、負荷サイクルが中止されたとき、機械は状態の変化を検出し、負の交番にスイッチする。すなわち、符号レッグは切り替わる。
− ブリッジが負の交番706にあり、負荷サイクルが1に等しいとき、機械は状態の変化を検出し、正の交番にスイッチする。すなわち、符号レッグは切り替わる。
− 正の交番
○磁化状態:電圧+Udcは、継続時間αT(TはPWM信号の周期を示す)の間で負荷に適用される。
○高フリーホイーリング状態:継続時間(1−α)Tの間で負荷に適用される負荷ゼロ電圧。
○その結果として、負荷によって観察される平均電圧は、正の交番の間では[数9]である。
○消磁状態:電圧−Udcは継続時間(1−α)Tの間で負荷に適用される。
○低フリーホイーリング状態:継続時間αTの間で負荷に適用される負荷ゼロ電圧。
○その結果として、負荷によって観察される平均電圧は、負の交番の間では[数10]である。
− 正の交番705の間、平均電圧を積α×UDCに等しい負荷に適用する手段。
− 負の交番706の間、平均電圧を積(α−1)×UDCに等しい負荷に適用する手段。
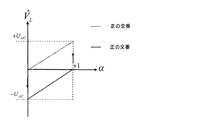
正の交番の場合においては、[数11]である。
− 相殺器801。
− 増幅器802。
− 負荷サイクルαを有するPWM(パルス幅変調)信号の発生器803。
− 負荷サイクルαのPWM信号を負荷サイクルα’に変換するため(及び負荷サイクルα’のPWM信号を補完する負荷サイクル[数16]のPWM信号を供給するため)の変換器809。
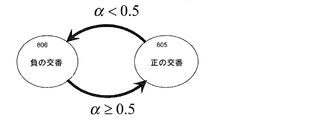
− 正の交番805及び負の交番806の間で切り替えるための制御手段808。
− ブリッジが正の交番805にあり、負荷サイクルαが正確に50%未満であるとき、状態の変化を検出し、負の交番に切り替える。すなわち、符号レッグは切り替わる。
− ブリッジが負の交番806にあり、負荷サイクルαが50%以上のとき、状態の変化を検出し、正の交番に切り替える。すなわち、符号レッグは切り替わる。
− 正の交番:
・磁化状態:バス電圧+Udcは、継続時間[数20]の間、負荷に供給される。
・磁化状態:バス電圧−Udcは、継続時間[数23]の間、負荷に供給される。
100…制御回路
109…DC電源
110…電気制御部材
201…電流測定分流器
202…演算増幅器、
5,6,7,8,105,106,107,108,203,204…端子、
300…フォー・クオドラント制御回路、
400…回路、
500…チャージポンプ回路、
501…補助電源装置、
502…ダイオード、
503…キャパシタ、
504,505…スイッチ、
600,700,800…レギュレーションループ、
601,701,801…相殺器、
602,702,802…増幅器、
603,703,803…発生器、
604…フォー・クオドラントブリッジ、
605…負荷、
708,808…制御手段、
809…変換器、
9…電源
AH…第1のスイッチ
BH…第2のスイッチ
AL…第3のスイッチ
BL…第4のスイッチ
Claims (17)
- 電気制御部材(110)における電流、又は前記電気制御部材の端子間の電圧を制御する回路(100,200,300,400,600,700)であって、
− 4つの端子(105,106,107,108)と、4つの制御スイッチ(AH,AL,BH,BL)を備えるブリッジと、
− 前記ブリッジのための電源(109)と、
− パルス幅変調によって、前記4つのスイッチの中の少なくとも2つを制御する手段とを備え、
前記電源(109)は、前記ブリッジの第1の端子(105)及び第2の端子(106)の間で接続され、
前記電気制御部材(110)は、前記ブリッジの第3の端子(107)及び第4の端子(108)の間で接続され、
前記第1のスイッチ(AH)は、前記ブリッジの前記第1の端子(105)及び前記第3の端子(107)の間で接続され、
前記第2のスイッチ(BH)は、前記ブリッジの前記第1の端子(105)及び前記第4の端子(108)の間で接続され、
前記第3のスイッチ(AL)は、前記ブリッジの前記第3の端子(107)及び前記第2の端子(106)の間で接続され、
前記第4のスイッチ(BL)は、前記ブリッジの前記第4の端子(108)及び前記第2の端子(106)の間で接続されている前記回路において、
この回路は、
− 前記第1(AH)及び第4(BL)のスイッチが閉じ、前記第2(BH)及び第3(AL)のスイッチが開いている第1の状態、
− 前記第2(BH)及び第3(AL)のスイッチが閉じ、前記第1(AH)及び第4(BL)のスイッチが開いている第2の状態、
− 以下の2つの状態のうちの少なくとも1つの状態、
○ 前記第3(AL)及び第4(BL)のスイッチは閉じ、前記第1(AH)及び第2(BH)のスイッチは開いている第3の状態、
○ 前記第1(AH)及び第2(BH)のスイッチは閉じ、前記第3(AL)及び第4(BL)のスイッチは開いている第4の状態を取り、
前記パルス幅変調制御手段は、
− 前記第1の状態から、前記第3又は第4の状態のうち少なくとも1つの状態への遷移、
− 前記第2の状態から、前記第3又は第4の状態のうち少なくとも1つの状態への遷移、
− 前記第3又は第4の状態のうち少なくとも1つの状態から、前記第1の状態への遷移、
− 前記第3又は第4の状態のうち少なくとも1つの状態から、前記第2の状態への遷移を許容するようになっていることを特徴とする回路(100,200,30,400,600,700)。 - 前記パルス幅変調制御手段は、以下を許可する特性を有する制御回路であって、
− 第1の、いわゆる負の交番フェーズは、前記第1の状態から前記第3の状態への遷移及び前記第3の状態から前記第1の状態への遷移を許容し、前記第1(AH)及び第3(AL)のスイッチは、振幅レッグ(A)と呼ばれる第1のレッグを形成し、いわゆるチョッピング周波数で切り替わり、前記第2(BH)及び第4(BL)のトランジスタは、符合レッグ(B)と呼ばれる第2のレッグを形成し、それぞれ閉じておりかつ開いており、
− 第2の、いわゆる正の交番フェーズは、前記第2の状態から前記第4の状態への遷移及び前記第4の状態から前記第1の状態への遷移を許容し、前記第1(AH)及び第3(AL)のスイッチは、前記いわゆるチョッピング周波数で切り替わり、前記第2(BH)及び第4(BL)のスイッチは前記符号レッグ(B)の前記第2(BH)及び第4(BL)スイッチを切り替え、これにより、前記チョッピング周波数未満の周波数で前記負及び正の交番間の遷移を確実にするようになっていることを特徴とする、請求項1に記載の制御回路(300,400,600,700)。 - 前記電気制御部材(110)及び前記第4端子(108)の間に直列接続される分流レジスタ(201)を備えることを特徴とする、請求項2に記載の制御回路(400)。
- 演算増幅器(202)と、
前記演算増幅器の反転入力、及び非反転入力を形成する前記分流レジスタ(201)の端子とを備えることを特徴とする請求項3に記載の制御回路(400)。 - − 充電した際に、前記第2のスイッチ(BH)へ制御電圧を供給するのに適したチャージポンプキャパシタ(503)と、
− 前記第4のスイッチ(BL)が閉じた際に前記チャージポンプキャパシタを充電するのに適し、前記第1の電源によって供給される電圧よりも低い電圧を供給する第2の電源(501)と、
− 前記チャージポンプキャパシタが前記第2の電源から再充電されるために前記制御回路が正の交番フェーズにあるとき、前記第4の状態から前記第3の状態への遷移を強いる手段とを備えることを特徴とする請求項2〜4のいずれか1項に記載の制御回路(400)。 - 前記制御手段は、
− 負荷サイクルαを有するパルス幅変調信号を生成するための手段(701,702,703)と、
− 前記負荷サイクルαを有する前記パルス幅変調信号を前記第3のトランジスタ(AL)に適用し、負荷サイクル1−αを有するパルス幅変調信号を前記第1のトランジスタ(AH)に適用するための手段(705,706)と、
− 次の状態装置を実装し、前記正及び負の交番フェーズの間を通過するための手段(708)とを備え、
前記状態装置は、
○ 前記ブリッジが正の交番フェーズにあり、負荷サイクルαが取り消されるとき、前記装置は状態の変化を検出し、負の交番フェーズに変更し、
○ 前記ブリッジが負の交番フェーズにあり、負荷サイクルαが100%に等しいとき、前記装置は状態の変化を検出し、正の交番フェーズに変更するようになっていることを特徴とする、請求項2〜5のいずれか1項に記載の制御回路(700)。 - 前記電源は、DC電圧+UDCを供給し、
− 前記正の交番フェーズの間、積α×UDCと等しい平均電圧を、前記電気制御部材に適用するための手段(705)と、
− 前記負の交番フェーズの間、(α―1)×UDCと等しい平均電圧を、前記電気制御部材に適用するための手段(706)とを備えることを特徴とする、請求項6に記載の制御回路(700)。 - 前記制御手段は、
− 負荷サイクルαを有する前記パルス幅変調信号を生成する手段(801,802,803)と、
− 負荷サイクルαを有する前記パルス幅変調信号を、負荷サイクルα´=│2α―1│を有するパルス幅変調信号に変換するための手段(809)と、
− 負荷サイクルα´を有する前記パルス幅変調信号を、前記第3のトランジスタ(AL)に適用し、前記正の交番フェーズの間、負荷サイクル1−α´を有するパルス幅変調信号を、前記第1のトランジスタ(AH)に適用するための手段(805)と、
− 負荷サイクル1−α´を有する前記パルス幅変調信号を、前記第3のトランジスタ(AL)に適用し、前記負の交番フェーズの間、前記負荷サイクルα´を有する前記パルス幅変調信号を、前記第1のトランジスタ(AH)に適用するための手段(806)と、
− 次の状態装置を実装し、前記正及び負の交番フェーズの間を通過するための手段(808)とを備え、
前記状態装置は、
○ 前記ブリッジが前記正の交番フェーズにあり、前記負荷サイクルαが正確に50%未満であるとき、前記装置は状態の変化を検出し、前記負の交番フェーズに変更し、
○ 前記ブリッジが前記負の交番フェーズにあり、前記負荷サイクルαが50%以上であるとき、前記装置は状態の変化を検出し、前記正の交番フェーズに変更するようになっていることを特徴とする、請求項2〜5のいずれか1項に記載の制御回路(800)。 - 前記電源は、DC電圧+UDCを供給し、
積(2α―1)×UDCに等しい平均電圧を、前記正及び負の交番フェーズの間、前記電気制御部材に適用するための手段を備えていることを特徴とする、請求項8に記載の制御回路(800)。 - 負荷サイクルαを有する前記パルス幅変調信号を負荷サイクルα´=│2α―1│を有する前記パルス幅変調信号に変換するための前記手段は、
− 負荷サイクルが50%に等しい信号と前記負荷サイクルαの信号との間で減算を実行するための手段と、
− 前記減算によって得られる信号を倍増させるための手段
とを備えることを特徴とする、請求項7又は8に記載の制御回路。 - 負荷サイクルが、50%に等しい信号と前記負荷サイクルαの信号との間で減算を実行するための前記手段は、それぞれ、前記負荷サイクル50%の信号及び前記負荷サイクルαの信号である2つの入力を有する排他的論理和論理機能を実行する手段であることを特徴とする、請求項10に記載の制御回路。
- 前記減算によって得られる信号を倍増させるための手段は、少なくとも1つのカウンタを備えていることを特徴とする、請求項10又は11に記載の制御回路。
- 前記制御手段はプログラマブル論理回路に含まれていることを特徴とする、請求項1〜12のいずれか1項に記載の制御回路。
- 前記スイッチは、MOSFETトランジスタであることを特徴とする、請求項1〜13のいずれか1項に記載の制御回路。
- 請求項1〜14のいずれか1項に記載の制御回路を使用する方法であって、可変インダクタンスを伴う誘導負荷によって形成されている電気部材用に用いられる使用方法。
- 前記電気部材は、動作部分を有するアクチュエータに含まれ、前記電気部材は、動作部分変位幅を制御することを特徴とする、請求項15に記載の使用方法。
- 前記アクチュエータは、自動車用の電磁気バルブアクチュエータであることを特徴とする、請求項16に記載の使用方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0708562A FR2924873B1 (fr) | 2007-12-07 | 2007-12-07 | Circuit de controle du courant dans un organe electrique de commande ou de la tension aux bornes dudit organe electrique de commande |
| PCT/FR2008/001695 WO2009101292A1 (fr) | 2007-12-07 | 2008-12-04 | Circuit de contrôle du courant dans un organe électrique de commande ou de la tension aux bornes dudit organe électrique de commande |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011507463A true JP2011507463A (ja) | 2011-03-03 |
| JP2011507463A5 JP2011507463A5 (ja) | 2013-03-07 |
Family
ID=39731783
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010536504A Pending JP2011507463A (ja) | 2007-12-07 | 2008-12-04 | 電気制御部材を流れる電流又は電気制御部材の端子間の電圧を制御する回路 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8576581B2 (ja) |
| EP (1) | EP2227855A1 (ja) |
| JP (1) | JP2011507463A (ja) |
| KR (1) | KR20100089872A (ja) |
| CN (1) | CN101889387B (ja) |
| FR (1) | FR2924873B1 (ja) |
| WO (1) | WO2009101292A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2961964B1 (fr) * | 2010-06-25 | 2012-07-13 | Valeo Sys Controle Moteur Sas | Procede de charge de moyens d'accumulation et dispositif de charge correspondant |
| CN102005908B (zh) * | 2010-11-22 | 2015-10-07 | 中国石油大学(北京) | 脉冲开关控制装置及控制方法 |
| FR2970108B1 (fr) * | 2010-12-30 | 2013-01-11 | Valeo Sys Controle Moteur Sas | Dispositif electromagnetique et actionneur electromagnetique correspondant. |
| US8782624B2 (en) * | 2011-12-15 | 2014-07-15 | Micron Technology, Inc. | Methods and systems for detection in a state machine |
| FR2986341B1 (fr) * | 2012-01-31 | 2014-03-14 | Continental Automotive France | Commande d'une charge inductive par modulation de largeur d'impulsion |
| JP6260587B2 (ja) * | 2015-06-29 | 2018-01-17 | トヨタ自動車株式会社 | 電源装置 |
| US9780675B2 (en) * | 2015-12-11 | 2017-10-03 | General Electric Company | System and method for controlling current in a power converter |
| US11451091B2 (en) * | 2017-03-28 | 2022-09-20 | Auckland Uniservices Limited | Converter |
| US11384588B2 (en) * | 2018-04-23 | 2022-07-12 | Assa Abloy Entrance Systems Ab | Drive arrangement for door operator |
| KR102506089B1 (ko) * | 2020-12-10 | 2023-03-03 | 현대오토에버 주식회사 | 교번 프리휠링을 위한 모터 제어 장치 및 모터의 교번 프리휠링 제어 방법 |
| CN115833579B (zh) * | 2023-02-09 | 2023-05-02 | 中国人民解放军国防科技大学 | 一种斩波器及磁悬浮列车 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59179489U (ja) * | 1983-05-13 | 1984-11-30 | 三洋電機株式会社 | パルス幅変調インバ−タ |
| US6119046A (en) * | 1997-02-04 | 2000-09-12 | Deutsches Zentrum Fur Luft-Und Raumfahrt E.V. | Method of controlling a chopper driver and a circuit arrangement for executing the method |
| JP2003047284A (ja) * | 2001-07-30 | 2003-02-14 | Nikon Corp | スイッチング素子異常検出装置、pwm増幅器、モータ駆動装置、ステージ装置、露光装置、この露光装置により製造したデバイスおよびデバイスの製造方法 |
| JP2004201453A (ja) * | 2002-12-20 | 2004-07-15 | Nissan Motor Co Ltd | 直流3相ブラシレスモータの駆動装置 |
| DE10328623A1 (de) * | 2003-06-25 | 2005-01-27 | Siemens Ag | Konverterschaltung und Brennkraftmaschine |
| JP2005354873A (ja) * | 2004-06-14 | 2005-12-22 | Alps Electric Co Ltd | モータ駆動制御装置 |
| US20060221648A1 (en) * | 2005-03-31 | 2006-10-05 | Chang Gung University | Modified high-efficiency phase shift modulation method |
| JP2007529190A (ja) * | 2004-03-12 | 2007-10-18 | エムケイエス インストゥルメンツ, インコーポレイテッド | スイッチング電源用の制御回路 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100483918C (zh) * | 2002-01-30 | 2009-04-29 | 皇家飞利浦电子股份有限公司 | 具有一个为负载产生电信号的电桥的系统和该系统的一个控制单元 |
| JP4156324B2 (ja) * | 2002-09-30 | 2008-09-24 | ローム株式会社 | 直流−交流変換装置、及び交流電力供給方法 |
| JP2004201485A (ja) * | 2002-11-29 | 2004-07-15 | Sony Corp | モータ、並びにアクチュエータの制御器 |
| US20040239401A1 (en) * | 2003-05-27 | 2004-12-02 | Chi-Shun Liao | Zero-voltage-switching full-bridge converter |
| US7272020B2 (en) * | 2004-02-20 | 2007-09-18 | Northeastern University | Isolated, current-fed, pulse width modulation, DC-DC converter |
| US7283379B2 (en) * | 2005-01-07 | 2007-10-16 | Harman International Industries, Incorporated | Current controlled switch mode power supply |
| DE102005036769A1 (de) * | 2005-08-04 | 2007-02-08 | Siemens Ag | Verfahren zum Überprüfen einer induktiven Last |
| US7529109B2 (en) * | 2006-06-23 | 2009-05-05 | Anpec Electronics Corporation | Driving circuit for switching DC power |
-
2007
- 2007-12-07 FR FR0708562A patent/FR2924873B1/fr not_active Expired - Fee Related
-
2008
- 2008-12-04 CN CN200880119482.5A patent/CN101889387B/zh not_active Expired - Fee Related
- 2008-12-04 EP EP08872282A patent/EP2227855A1/fr not_active Withdrawn
- 2008-12-04 WO PCT/FR2008/001695 patent/WO2009101292A1/fr active Application Filing
- 2008-12-04 JP JP2010536504A patent/JP2011507463A/ja active Pending
- 2008-12-04 US US12/745,845 patent/US8576581B2/en not_active Expired - Fee Related
- 2008-12-04 KR KR1020107012616A patent/KR20100089872A/ko not_active Application Discontinuation
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59179489U (ja) * | 1983-05-13 | 1984-11-30 | 三洋電機株式会社 | パルス幅変調インバ−タ |
| US6119046A (en) * | 1997-02-04 | 2000-09-12 | Deutsches Zentrum Fur Luft-Und Raumfahrt E.V. | Method of controlling a chopper driver and a circuit arrangement for executing the method |
| JP2003047284A (ja) * | 2001-07-30 | 2003-02-14 | Nikon Corp | スイッチング素子異常検出装置、pwm増幅器、モータ駆動装置、ステージ装置、露光装置、この露光装置により製造したデバイスおよびデバイスの製造方法 |
| JP2004201453A (ja) * | 2002-12-20 | 2004-07-15 | Nissan Motor Co Ltd | 直流3相ブラシレスモータの駆動装置 |
| DE10328623A1 (de) * | 2003-06-25 | 2005-01-27 | Siemens Ag | Konverterschaltung und Brennkraftmaschine |
| JP2007529190A (ja) * | 2004-03-12 | 2007-10-18 | エムケイエス インストゥルメンツ, インコーポレイテッド | スイッチング電源用の制御回路 |
| JP2005354873A (ja) * | 2004-06-14 | 2005-12-22 | Alps Electric Co Ltd | モータ駆動制御装置 |
| US20060221648A1 (en) * | 2005-03-31 | 2006-10-05 | Chang Gung University | Modified high-efficiency phase shift modulation method |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100270998A1 (en) | 2010-10-28 |
| FR2924873A1 (fr) | 2009-06-12 |
| KR20100089872A (ko) | 2010-08-12 |
| CN101889387A (zh) | 2010-11-17 |
| EP2227855A1 (fr) | 2010-09-15 |
| FR2924873B1 (fr) | 2011-11-25 |
| WO2009101292A1 (fr) | 2009-08-20 |
| CN101889387B (zh) | 2014-04-23 |
| US8576581B2 (en) | 2013-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011507463A (ja) | 電気制御部材を流れる電流又は電気制御部材の端子間の電圧を制御する回路 | |
| US5428522A (en) | Four quadrant unipolar pulse width modulated inverter | |
| US5111378A (en) | DC chopper converter | |
| CN110391743B (zh) | 开关模式电源 | |
| US8378633B2 (en) | MultiChannel DC controller operating independently of output power in critical conduction mode | |
| US6160388A (en) | Sensing of current in a synchronous-buck power stage | |
| CN103916013B (zh) | Dc‑dc变换器及其操作方法 | |
| Schellekens et al. | Dead-time compensation for PWM amplifiers using simple feed-forward techniques | |
| CN104852559A (zh) | 开关功率转换器中的相故障检测 | |
| TWI542131B (zh) | 具零電壓切換能力且以穩定切換頻率運作之可切換降壓轉換器 | |
| US20150097544A1 (en) | System and Method for Controlling a Power Supply | |
| JP2003511005A (ja) | 第2のブリッジ回路内のパルス幅変調されたブリッジ回路 | |
| CN114301268A (zh) | 基于增强型mosfet导通电阻的电流感测的动态偏置技术 | |
| CN104426451A (zh) | 用于电机的驱动电路 | |
| JP2011507463A5 (ja) | ||
| Achary et al. | A simple voltage modulator scheme for torque ripple minimization in a permanent magnet brushless DC motor | |
| CN105765855A (zh) | 发电机输出的调节 | |
| US7161819B2 (en) | Zero-crossing correction in sinusoidally commutated motors | |
| US8207695B2 (en) | Control circuit of a full-bridge stage | |
| Himmelstoss et al. | A simple two-quadrant DC motor controller | |
| CN112271976A (zh) | 一种基于桥式电路的电机电流控制方法 | |
| US10587192B2 (en) | DC-DC voltage reducing converter with a test mode operation | |
| US11713134B2 (en) | Power supply for aircraft systems | |
| JP2002188945A (ja) | 電磁流量計 | |
| CN100492829C (zh) | 开关模式dc-dc转换器的控制电路和控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130116 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130724 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130730 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131029 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131202 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140513 |