JP2011102955A - 光センサモジュールの製造方法およびそれによって得られた光センサモジュール - Google Patents
光センサモジュールの製造方法およびそれによって得られた光センサモジュール Download PDFInfo
- Publication number
- JP2011102955A JP2011102955A JP2010030802A JP2010030802A JP2011102955A JP 2011102955 A JP2011102955 A JP 2011102955A JP 2010030802 A JP2010030802 A JP 2010030802A JP 2010030802 A JP2010030802 A JP 2010030802A JP 2011102955 A JP2011102955 A JP 2011102955A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- optical waveguide
- optical
- fitting
- sensor module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 301
- 238000004519 manufacturing process Methods 0.000 title claims abstract description 35
- 239000000758 substrate Substances 0.000 claims abstract description 222
- 238000005253 cladding Methods 0.000 claims description 42
- 238000000034 method Methods 0.000 claims description 20
- 230000008878 coupling Effects 0.000 claims description 13
- 238000010168 coupling process Methods 0.000 claims description 13
- 238000005859 coupling reaction Methods 0.000 claims description 13
- 238000000206 photolithography Methods 0.000 claims description 8
- 230000013011 mating Effects 0.000 claims 2
- TVMXDCGIABBOFY-UHFFFAOYSA-N octane Chemical compound CCCCCCCC TVMXDCGIABBOFY-UHFFFAOYSA-N 0.000 claims 1
- 239000010410 layer Substances 0.000 description 167
- 239000011347 resin Substances 0.000 description 39
- 229920005989 resin Polymers 0.000 description 39
- 239000000463 material Substances 0.000 description 29
- 238000000465 moulding Methods 0.000 description 22
- 238000007493 shaping process Methods 0.000 description 10
- HEMHJVSKTPXQMS-UHFFFAOYSA-M Sodium hydroxide Chemical compound [OH-].[Na+] HEMHJVSKTPXQMS-UHFFFAOYSA-M 0.000 description 9
- 239000010935 stainless steel Substances 0.000 description 7
- 229910001220 stainless steel Inorganic materials 0.000 description 7
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 6
- 230000015572 biosynthetic process Effects 0.000 description 6
- 230000000052 comparative effect Effects 0.000 description 6
- 238000009713 electroplating Methods 0.000 description 6
- 238000010438 heat treatment Methods 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 239000000853 adhesive Substances 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000001070 adhesive effect Effects 0.000 description 4
- 238000005530 etching Methods 0.000 description 4
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 4
- 239000010453 quartz Substances 0.000 description 4
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 4
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 3
- 239000007864 aqueous solution Substances 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 229910052709 silver Inorganic materials 0.000 description 3
- 239000004332 silver Substances 0.000 description 3
- 239000000243 solution Substances 0.000 description 3
- YEJRWHAVMIAJKC-UHFFFAOYSA-N 4-Butyrolactone Chemical compound O=C1CCCO1 YEJRWHAVMIAJKC-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 239000012790 adhesive layer Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 239000003822 epoxy resin Substances 0.000 description 2
- LZCLXQDLBQLTDK-UHFFFAOYSA-N ethyl 2-hydroxypropanoate Chemical compound CCOC(=O)C(C)O LZCLXQDLBQLTDK-UHFFFAOYSA-N 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- 229910052759 nickel Inorganic materials 0.000 description 2
- 238000007747 plating Methods 0.000 description 2
- 229920000647 polyepoxide Polymers 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 239000009719 polyimide resin Substances 0.000 description 2
- 239000002904 solvent Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 229920001187 thermosetting polymer Polymers 0.000 description 2
- 239000002966 varnish Substances 0.000 description 2
- -1 β-hydroxyethoxy Chemical group 0.000 description 2
- NQXNYVAALXGLQT-UHFFFAOYSA-N 2-[4-[9-[4-(2-hydroxyethoxy)phenyl]fluoren-9-yl]phenoxy]ethanol Chemical compound C1=CC(OCCO)=CC=C1C1(C=2C=CC(OCCO)=CC=2)C2=CC=CC=C2C2=CC=CC=C21 NQXNYVAALXGLQT-UHFFFAOYSA-N 0.000 description 1
- BVKZGUZCCUSVTD-UHFFFAOYSA-L Carbonate Chemical compound [O-]C([O-])=O BVKZGUZCCUSVTD-UHFFFAOYSA-L 0.000 description 1
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- 229910000599 Cr alloy Inorganic materials 0.000 description 1
- 229910021578 Iron(III) chloride Inorganic materials 0.000 description 1
- 229910000990 Ni alloy Inorganic materials 0.000 description 1
- 239000007983 Tris buffer Substances 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 125000002723 alicyclic group Chemical group 0.000 description 1
- 239000001273 butane Substances 0.000 description 1
- YFNONBGXNFCTMM-UHFFFAOYSA-N butoxybenzene Chemical group CCCCOC1=CC=CC=C1 YFNONBGXNFCTMM-UHFFFAOYSA-N 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000011651 chromium Substances 0.000 description 1
- 239000000788 chromium alloy Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- GYZLOYUZLJXAJU-UHFFFAOYSA-N diglycidyl ether Chemical compound C1OC1COCC1CO1 GYZLOYUZLJXAJU-UHFFFAOYSA-N 0.000 description 1
- 238000001035 drying Methods 0.000 description 1
- 238000007772 electroless plating Methods 0.000 description 1
- 229940116333 ethyl lactate Drugs 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- RBTARNINKXHZNM-UHFFFAOYSA-K iron trichloride Chemical compound Cl[Fe](Cl)Cl RBTARNINKXHZNM-UHFFFAOYSA-K 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- OFBQJSOFQDEBGM-UHFFFAOYSA-N n-pentane Natural products CCCCC OFBQJSOFQDEBGM-UHFFFAOYSA-N 0.000 description 1
- 125000001997 phenyl group Chemical group [H]C1=C([H])C([H])=C(*)C([H])=C1[H] 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/42—Coupling light guides with opto-electronic elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/42—Coupling light guides with opto-electronic elements
- G02B6/4201—Packages, e.g. shape, construction, internal or external details
- G02B6/4219—Mechanical fixtures for holding or positioning the elements relative to each other in the couplings; Alignment methods for the elements, e.g. measuring or observing methods especially used therefor
- G02B6/4228—Passive alignment, i.e. without a detection of the degree of coupling or the position of the elements
- G02B6/423—Passive alignment, i.e. without a detection of the degree of coupling or the position of the elements using guiding surfaces for the alignment
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Optical Integrated Circuits (AREA)
- Optical Couplings Of Light Guides (AREA)
- Semiconductor Lasers (AREA)
Abstract
【課題】光導波路部分のコアと基板部分の光学素子との調芯作業が不要となるとともに、調芯精度の向上およびコストの低減が可能となる光センサモジュールの製造方法およびそれによって得られた光センサモジュールを提供する。
【解決手段】基板部分位置決め用の突起部4および基板部分嵌合用の溝部3bを有する光導波路部分W2 と、突起部4に位置決めされる位置決め板部5aおよび溝部3bに嵌合する嵌合板部5bを有する基板部分E2 とを、個別に作製し、突起部4に位置決め板部5aを位置決めし、溝部3bに嵌合板部5aを嵌合し一体化する。ここで、突起部4は、コア2の一端面2aに対して高精度な位置関係にある。また、位置決め板部5aは、光学素子8に対して適正位置に適正形状で形成されている。このため、コアの一端面2aと光学素子8とは、高精度に位置決めされ、自動的に調芯された状態になる。
【選択図】図1
【解決手段】基板部分位置決め用の突起部4および基板部分嵌合用の溝部3bを有する光導波路部分W2 と、突起部4に位置決めされる位置決め板部5aおよび溝部3bに嵌合する嵌合板部5bを有する基板部分E2 とを、個別に作製し、突起部4に位置決め板部5aを位置決めし、溝部3bに嵌合板部5aを嵌合し一体化する。ここで、突起部4は、コア2の一端面2aに対して高精度な位置関係にある。また、位置決め板部5aは、光学素子8に対して適正位置に適正形状で形成されている。このため、コアの一端面2aと光学素子8とは、高精度に位置決めされ、自動的に調芯された状態になる。
【選択図】図1
Description
本発明は、光導波路部分と、光学素子が実装された基板部分とを備えた光センサモジュールの製造方法およびそれによって得られた光センサモジュールに関するものである。
光センサモジュールは、図11(a),(b)に示すように、アンダークラッド層71,コア72およびオーバークラッド層73をこの順に形成した光導波路部分W0 と、基板81に光学素子82が実装された基板部分E0 とを個別に作製し、上記光導波路部分W0 のコア72と基板部分E0 の光学素子82とを調芯した状態で、上記光導波路部分W0 の端部に上記基板部分E0 を接続して製造される。なお、図11(a),(b)において、符号74は接着剤層、符号75は基台、符号83は絶縁層、符号84は光学素子実装用パッド、符号85は透明樹脂層である。
ここで、上記光導波路部分W0 のコア72と基板部分E0 の光学素子82との上記調芯は、通常、自動調芯機を用いて行われる(例えば、特許文献1参照)。この自動調芯機では、光導波路部分W0 を固定ステージ(図示せず)に固定し、基板部分E0 を移動可能なステージ(図示せず)に固定した状態で行われる。すなわち、上記光学素子82が発光素子である場合、図11(a)に示すように、その発光素子から光H1 を発光させた状態で、コア72の一端面(光入口)72aに対して、発光素子の位置を変化させつつ、コア72の他端面(光出口)72bからオーバークラッド層73の他端部のレンズ部73bを経て出射した光の光量(自動調芯機に備えられている受光素子91に生じる電圧)をモニタリングし、その光量が最大となった位置を、調芯位置(コア72と光学素子82とが相互に適正になる位置)として決定する。また、上記光学素子82が受光素子である場合、図11(b)に示すように、コア72の他端面72bから一定量の光(自動調芯機に備えられている発光素子92から発光され、オーバークラッド層73の他端部のレンズ部73bを透過した光)H2 を入光させ、その光H2 をコア72の一端面72aからオーバークラッド層73の一端部73aを経て出射させた状態で、コア72の一端面72aに対して、受光素子の位置を変化させつつ、その受光素子で受光する光量(電圧)をモニタリングし、その光量が最大となった位置を、調芯位置として決定する。
しかしながら、上記自動調芯機を用いた調芯では、高精度な調芯が可能であるものの、手間と時間とを要し、量産には適さない。
そこで、本出願人は、上記のような機器と手間をかけることなく調芯できる光センサモジュールを提案し既に出願している(特願2009−180723)。この光センサモジュールは、その平面図を図12(a)に、そのB−B断面図を図12(b)に示すように、光導波路部分W1 において、型成形によりオーバークラッド層43を形成する際に、コア42を被覆しないオーバークラッド層43の部分〔図12(a)の右端部の上下の部分〕を軸方向に延長して形成する。その際、この延長部分43aにおいて、上記オーバークラッド層43の型成形と同時に、コア42の一端面42aに対して適正な位置に、基板部分嵌合用の溝部(嵌合部)43bを形成する。一方、基板部分E1 において、上記溝部43bに嵌合する嵌合板部(被嵌合部)51aを、光学素子54に対して適正な位置に形成する。そして、上記光導波路部分W1 の溝部43bと上記基板部分E1 の嵌合板部51aとの嵌合により、光導波路部分W1 と上記基板部分E1 とを結合させ、自動的に調芯された光センサモジュールを得ることができる。なお、図12(a),(b)において、符号41はアンダークラッド層、符号44は接着剤層、符号45は基台、符号45aは貫通孔、符号51は上記嵌合板部51aが形成された整形基板、符号52は絶縁層、符号53は光学素子実装用パッド、符号54は光学素子、符号55は透明樹脂層である。
このように、本出願人が既に出願している上記方法では、光導波路部分W1 のコア42と、基板部分E1 の光学素子54とを、調芯作業することなく、自動的に調芯した状態にすることができる。そして、時間を要する調芯作業が不要となるため、光センサモジュールの量産が可能となり、生産性に優れる。しかしながら、上記方法では、調芯精度およびコストの点で改善の余地があった。すなわち、上記方法では、調芯精度が±100μmとやや粗く、発光素子(光学素子54)からの光をコア42の一端面(光入口)42aに適正に入射するために、比較的高出力の発光素子が使用されていた。そのため、発光素子のコストが高くなっていた。また、調芯精度を、型成形により形成したオーバークラッド43の溝部43bで実現しているため、その型成形に用いる成形型の作製に、高水準の加工精度(±15μm)が必要があった。そのため、成形型のコストが高くなっていた。
本発明は、このような事情に鑑みなされたもので、光導波路部分のコアと基板部分の光学素子との調芯作業が不要となるとともに、調芯精度の向上およびコストの低減が可能となる光センサモジュールの製造方法およびそれによって得られた光センサモジュールの提供をその目的とする。
上記の目的を達成するため、本発明は、光導波路部分と、光学素子が実装された基板部分とを結合させてなる光センサモジュールの製造方法であって、上記光導波路部分の作製工程が、アンダークラッド層の表面に,一個のフォトマスクを使用したフォトリソグラフィ法により,光路用の線状のコアを形成すると同時に,そのコアの端部に対して適正位置となる部分に,基板部分位置決め用の位置決め手段を形成する工程と、型成形法により,上記コアを被覆するオーバークラッド層の形成と同時に,そのオーバークラッド層の部分に,上記基板部分嵌合用の嵌合部を形成する工程とを備え、上記基板部分の作製工程が、基板上に光学素子実装用パッドを配設し,その基板の,光学素子実装用パッドに対する適正位置に,上記基板部分位置決め用の位置決め手段に位置決めされる被位置決め部を形成すると同時に,上記基板部分嵌合用の嵌合部に嵌合する被嵌合部を形成する工程と、上記光学素子実装用パッドに光学素子を実装する工程とを備え、上記光導波路部分と上記基板部分とを結合させ光センサモジュールにする工程が、上記光導波路部分の上記位置決め手段を利用して,上記基板部分の上記被位置決め部を位置決めするとともに,上記光導波路部分の上記嵌合部に,上記基板部分の上記被嵌合部を嵌合させる工程を備えている光センサモジュールの製造方法を第1の要旨とする。
また、本発明は、光導波路部分と、光学素子が実装された基板部分とを結合させてなる光センサモジュールであって、上記光導波路部分が、アンダークラッド層と、このアンダークラッド層の表面に形成された光路用の線状のコアと、このコアの端部に対して適正位置となる部分に形成された基板部分位置決め用の位置決め手段と、上記コアを被覆するオーバークラッド層と、このオーバークラッドの所定部分に形成された基板部分嵌合用の嵌合部とを備え、上記基板部分が、上記基板部分位置決め用の位置決め手段に位置決めされる被位置決め部および上記基板部分嵌合用の嵌合部に嵌合する被嵌合部を有する基板と、その基板上の所定部分に配設された光学素子実装用パッドと、この光学素子実装用パッドに実装された光学素子とを備え、上記光導波路部分と上記基板部分との結合が、上記光導波路部分の上記位置決め手段を利用した,上記基板部分の上記被位置決め部の位置決めと、上記光導波路部分の上記嵌合部への,上記基板部分の上記被嵌合部の嵌合とがなされて行われている、上記製造方法により得られた光センサモジュールを第2の要旨とする。
本発明の光センサモジュールの製造方法は、光導波路部分を作製する工程において、アンダークラッド層の表面に、一個のフォトマスクを使用したフォトリソグラフィ法により、コアと同時に、基板部分位置決め用の位置決め手段を形成する。このため、そのコアの端部と基板部分位置決め用の位置決め手段との位置関係が高精度になっている。その後、オーバークラッド層を型成形法により形成する際に、そのオーバークラッド層の部分に、基板部分嵌合用の嵌合部を形成する。基板部分の位置決めは、上記位置決め手段を利用して行われ、上記嵌合部は、上記基板部分を保持するためのものである。このため、上記嵌合部をオーバークラッド層の部分に形成する際に用いる成形型の作製に、高水準の加工精度は不要であり、その分、成形型のコストを低減することができる。一方、基板部分を作製する工程では、光学素子実装用パッドに対して適正位置に、上記基板部分位置決め用の位置決め手段に位置決めされる被位置決め部を形成する同時に、上記基板部分嵌合用の嵌合部に嵌合する被嵌合部を形成する。このため、上記光学素子実装用パッドに実装された光学素子と被位置決め部とが適正な位置関係になっている。そして、上記光導波路部分と上記基板部分とを結合させ光センサモジュールにする工程では、光導波路部分の位置決め手段を利用して、基板部分の被位置決め部を位置決めするとともに、光導波路部分の嵌合部に、基板部分の被嵌合部を嵌合させ、光導波路部分と基板部分とを一体化する。すなわち、この工程では、コアの端部に対して高精度な位置関係にある位置決め手段を利用して、光学素子に対して適正な位置関係にある被位置決め部を位置決めし、その位置決めされた状態を維持するために、光導波路部分の嵌合部に、基板部分の被嵌合部を嵌合させている。このため、製造された光センサモジュールは、コアの端部と光学素子との位置関係が高精度になり、コアの端部と光学素子との間で光伝播が適正に行われるようになる。その結果、光学素子を必ずしも高出力のものとしなくてもよく、その分、光学素子のコストを低減することができる。したがって、本発明の光センサモジュールの製造方法によれば、光導波路部分のコアと、基板部分の光学素子とを、調芯作業することなく、自動的に高精度に調芯した状態にすることができるとともに、コストを低減することができる。そして、時間を要する調芯作業が不要となるため、光センサモジュールの量産が可能となる。
特に、上記光導波路部分の上記位置決め手段を、平面視コ字状または平面視L字状の突起部に形成し、上記基板部分の上記被位置決め部を、上記突起部の内側面に当接する板部に形成する場合には、突起部(位置決め手段)と板部(被位置決め部)との位置決めが簡単であるため、より生産性に優れる。
また、上記光導波路部分の上記嵌合部を、オーバークラッド層の厚み方向に沿う溝部に形成するとともに、そのオーバークラッド層の上面部分に対応する溝部の部分の幅を、オーバークラッド層の上面から下方にいくにつれて徐々に狭く形成し、上記基板部分の上記被嵌合部を、上記溝部に嵌合する板部に形成し、上記光導波路部分の上記位置決め手段を、平面視コ字状の突起部に形成するとともに、そのコ字状の開口部分の幅を、開口端から奥方にいくにつれて徐々に狭く形成し、上記基板部分の上記被位置決め部を、上記突起部の内側面に当接する板部に形成し、光導波路部分と基板部分との結合を、光導波路部分の上記溝部の上端から基板部分の上記被嵌合部を挿入した後、平面視コ字状の上記突起部の開口端から基板部分の上記被位置決め部を挿入し奥端に当接させることにより行う場合には、溝部(嵌合部)と板部(被嵌合部)との位置決め、および突起部(位置決め手段)と板部(被位置決め部)との位置決めがより簡単であるため、生産性がさらに向上する。
そして、本発明の光センサモジュールは、上記製造方法により得られたものであるため、光導波路部分のコアの端部と、基板部分の光学素子との位置決めは、光導波路部分の位置決め手段を利用した、基板部分の被位置決め部の位置決めにより行われている。そして、その位置決め状態の維持を、光導波路部分の嵌合部と、基板部分の被嵌合部との嵌合により行われている。このため、本発明の光センサモジュールに衝撃や振動等が加わっても、上記コアの端部と光学素子との位置関係は、ずれることがなく、高精度な調芯状態を維持することができる。
特に、上記光導波路部分の上記位置決め手段が、平面視コ字状または平面視L字状の突起部に形成され、上記基板部分の上記被位置決め部が、上記突起部の内側面に当接する板部に形成されている場合には、簡単な位置決め構造で、高精度な調芯状態の光センサモジュールになっている。
また、上記光導波路部分の上記嵌合部が、オーバークラッド層の厚み方向に沿う溝部に形成されているとともに、そのオーバークラッド層の上面部分に対応する溝部の部分の幅が、オーバークラッド層の上面から下方にいくにつれて徐々に狭く形成され、上記基板部分の上記被嵌合部が、上記溝部に嵌合する板部に形成され、上記光導波路部分の上記位置決め手段が、平面視コ字状の突起部に形成されているとともに、そのコ字状の開口部分の幅が、開口端から奥にいくにつれて徐々に狭く形成され、上記基板部分の上記被位置決め部が、上記突起部の内側面に当接する板部に形成されている場合にも、簡単な位置決め構造で、高精度な調芯状態の光センサモジュールになっている。
つぎに、本発明の実施の形態を図面にもとづいて詳しく説明する。
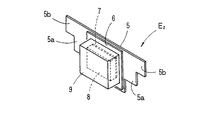
図1は、本発明の光センサモジュールの一実施の形態の一端部〔図2(a),(b)の右端部〕を模式的に示す斜視図であり、図2(a)は、上記光センサモジュールを模式的に示す平面図であり、図2(b)は、そのA−A断面図である。この光センサモジュールは、光導波路部分W2 と基板部分E2 とを個別に作製し、それらを一体化したものである。すなわち、光導波路部分W2 には、基板部分位置決め用の一対の平面視コ字状の突起部(位置決め手段)4が形成されているとともに、基板部分嵌合用の一対の溝部(嵌合部)3bが形成されている。一方、基板部分E2 には、上記光導波路部分W2 の平面視コ字状の突起部4のスリット部分(コ字状の内側部分)4aに位置決めされる位置決め板部(被位置決め部)5aが形成されているとともに、上記光導波路部分W2 の溝部3bに嵌合する嵌合板部(被嵌合部)5bが形成されている。そして、光導波路部分W2 の平面視コ字状の突起部4のスリット部分4aに、基板部分E2 の位置決め板部5aが位置決めされているともに、光導波路部分W2 の溝部3bに、基板部分E2 の嵌合板部5bが嵌合されている状態で、光導波路部分W2 と基板部分E2 とが一体化され、光センサモジュールが構成されている。
ここで、光導波路部分W2 において、上記基板部分位置決め用の突起部4は、一個のフォトマスクを使用したフォトリソグラフィ法により、コア2と同時に形成され、コア2の一端面2aに対して高精度に設定された位置に、適正形状に形成されている。また、基板部分E2 には、光学素子8が実装されており、その光学素子8に対して適正位置に、上記位置決め板部5aが適正形状に形成されている。このため、光導波路部分W2 の突起部4と基板部分E2 の位置決め板部5aとの位置決めにより、コア2の一端面2aと光学素子8とは、高精度に位置決めされ、高精度に調芯された状態になっている。また、光導波路部分W2 の溝部3bと基板部分E2 の嵌合板部5bとの嵌合により、上記高精度な調芯状態を維持している。
なお、上記光導波路部分W2 は、ステンレス等からなるシート材10上に形成されている。また、図1および図2(a),(b)では、光導波路部分W2 の平面視コ字状の突起部4と基板部分E2 の位置決めされる位置決め板部5aとの間に隙間11を形成した状態で図示し、光導波路部分W2 の溝部3bと基板部分E2 の嵌合板部5bとの間に隙間12を形成した状態で図示しているが、これは図面による理解を容易にするためであり、実際は、これら隙間11,12は殆どない。また、図1および図2(a),(b)において、符号1はアンダークラッド層、符号3はオーバークラッド層、符号3aは延長部分、符号3cはレンズ部、符号5は整形基板、符号6は絶縁層、符号7は光学素子実装用パッド、符号9は透明樹脂層、符号20は貫通孔である。
より詳しく説明すると、上記光導波路部分W2 は、図3にその一端部の斜視図を示すように、アンダークラッド層1と、このアンダークラッド層1の表面に所定パターンの線状に形成された光路用のコア2および一対の平面視コ字状の突起部4と、上記コア2を被覆した状態で上記アンダークラッド層1の表面に形成されたオーバークラッド層3とを備えている。上記一対の平面視コ字状の突起部4は、コア2の一端面2aから少し離れた位置に、そのコ字状の開口側を向かい合わせた状態で形成されている。その向かい合う方向(図3では左右方向)は、コア2の軸方向と直角になっている。また、光導波路部分W2 の一端部側(図3では下側)では、図3における左右の部分が軸方向(図3では左斜め下方向)に延長されている。すなわち、この延長部分3aは、コア2の存在しないオーバークラッド層3の部分の延長部分3aである。そして、その延長部分3aに、基板部分嵌合用の一対の溝部3bが、その開口側を向かい合わせた状態で形成されている。この溝部3bは、オーバークラッド層3を厚み方向に貫通した、いわば切欠部状に形成されている。なお、この実施の形態では、図2(b)に示すように、オーバークラッド層3の他端部〔図2(b)では左端部〕は、表面が外側に向かって反る略1/4円弧状のレンズ部3cに形成されている。
一方、上記基板部分E2 は、図4にその斜視図を示すように、整形基板5と、絶縁層6と、光学素子実装用パッド7と、光学素子8と、透明樹脂層9とを備えている。上記整形基板5には、上記一対の突起部4に位置決めするための位置決め板部5aが左右両側に突出した状態で形成されているとともに、上記溝部3bに嵌合するための嵌合板部5bが左右両側に突出した状態で形成されている。上記絶縁層6は、上記整形基板5のうち位置決め板部5aおよび嵌合板部5bを除く表面に形成されている。上記光学素子実装用パッド7は、上記絶縁層6の表面中央部に形成されている。上記光学素子8は、光学素子実装用パッド7に実装されている。上記透明樹脂層9は、上記光学素子8を封止した状態で形成されている。上記整形基板5において左右に突出している長方形状の位置決め板部5aおよび嵌合板部5bは、エッチングにより形成され、上記光学素子実装用パッド7に対して、適正に位置決めされ整形されている。また、上記光学素子8の発光部または受光部は、その光学素子8の表面に形成されている。なお、上記絶縁層6の表面には、光学素子実装用パッド7に接続する電気回路(図示せず)が形成されている。
そして、上記光センサモジュールは、図1および図2(a),(b)に示すように、上記光導波路部分W2 の一対の平面視コ字状の突起部4の内側面に、上記基板部分E2 の位置決め板部5aを当接させて位置決めするとともに、上記光導波路部分W2 の一対の溝部3bに、上記基板部分E2 の嵌合板部5bを嵌合して一体化している。この一体化状態では、上記光学素子8の表面(発光部または受光部)は、コア2の一端面2aに高精度に対向しているため、光学素子8の出力が低くても、光の送受信が高精度に可能な状態となっている。また、上記一対の平面視コ字状の突起部4に上記位置決め板部5aが位置決めされていることにより、上記光学素子8は、アンダークラッド層1に対して、図2(a)における上下方向(X軸方向)が適正に位置決めされている。また、上記一体化状態では、図1に示すように、左右に突出した上記位置決め板部5aの下端縁がアンダークラッド層1の表面に当接しており、それにより、上記光学素子8は、アンダークラッド層1の表面に直角な方向(Z軸方向)が適正に位置決めされている。すなわち、コアの一端面2aと光学素子8とは、上記一体化により、同図に示すように、位置関係が高精度になっており、自動的に高精度に調芯された状態になっている。
なお、この実施の形態では、図1および図2(a),(b)に示すように、シート材10とアンダークラッド層1との積層体の、上記基板部分E2 に対応する部分に、四角形の貫通孔20が形成されている。そして、図2(b)に示すように、その貫通孔20を通して、基板部分E2 の一部分が上記シート材10の裏面から突出している。その基板部分E2 の突出部分は、シート材10の裏面側において、例えば、光学素子に信号の送信等するためのマザーボード(図示せず)等に接続される。
上記光センサモジュールでは、光Hは、つぎのように伝播するようになっている。すなわち、例えば、上記光学素子8が発光素子である場合は、図2(b)に示すように、その光学素子8の発光部から発光された光Hは、透明樹脂層9を経て、オーバークラッド層3を通り抜けた後、コア2の一端面2aからコア2内に入射する。ついで、その光Hは、コア2内を軸方向に進む。そして、その光Hは、コア2の他端面2bから出射し、その後、オーバークラッド層3の他端部のレンズ部3cのレンズ面から、そのレンズ部3cの屈折作用により、光Hの発散が抑制された状態で出射する。
一方、上記光学素子8が受光素子である場合は、図示しないが、光は、上記とは逆の方向に進む。すなわち、光は、オーバークラッド層3の他端部のレンズ部3cのレンズ面から入射し、そのレンズ部3cの屈折作用により、絞って集束された状態で、上記コア2の他端面2bからコア2内に入射する。ついで、その光は、コア2内を軸方向に進み、オーバークラッド層3を通り抜けて出射された後、透明樹脂層9を経て、上記光学素子8の受光部で受光される。
上記光センサモジュールは、下記の(1)〜(3)の工程を経て製造される。
(1)上記光導波路部分W2 を作製する工程〔図5(a)〜(c),図6(a)〜(d)参照〕。
(2)上記基板部分E2 を作製する工程〔図7(a)〜(d)参照〕。
(3)上記基板部分E2 を上記光導波路部分W2 に結合する工程。
(1)上記光導波路部分W2 を作製する工程〔図5(a)〜(c),図6(a)〜(d)参照〕。
(2)上記基板部分E2 を作製する工程〔図7(a)〜(d)参照〕。
(3)上記基板部分E2 を上記光導波路部分W2 に結合する工程。
上記(1)の光導波路部分W2 の作製工程について説明する。まず、アンダークラッド層1を形成する際に用いる平板状のシート材10〔図5(a)参照〕を準備する。このシート材10の形成材料としては、例えば、金属,樹脂等があげられる。なかでも、ステンレスが好ましい。ステンレス製のシート材10は、熱に対する伸縮耐性に優れ、上記光導波路装置の製造過程において、様々な寸法が設計値に略維持されるからである。また、シート材10の厚みは、例えば、10μm〜100μmの範囲内に設定され、経済性の観点から20〜70μmの範囲内が好ましい。
ついで、図5(a)に示すように、上記シート材10の表面に、アンダークラッド層形成用の感光性エポキシ樹脂等の感光性樹脂が溶媒に溶解しているワニスを塗布した後、必要に応じて、それを加熱処理(50〜120℃×10〜30分間程度)して乾燥させ、アンダークラッド層1形成用の感光性樹脂層1Aを形成する。そして、その感光性樹脂層1Aを、紫外線等の照射線により露光することにより、アンダークラッド層1に形成する。アンダークラッド層1の厚みは、通常、5〜100μmの範囲内に設定される。
つぎに、図5(b)に示すように、上記アンダークラッド層1の表面に、上記アンダークラッド層形成用の感光性樹脂層1Aの形成方法と同様にして、コアおよび平面視コ字状の突起部形成用の感光性樹脂層2Aを形成する。そして、コア2および平面視コ字状の突起部4のパターンに対応する開口パターンが高精度に設定された位置に形成されているフォトマスクを介して、上記感光性樹脂層2Aを照射線により露光する。つぎに、加熱処理を行った後、現像液を用いて現像を行うことにより、図5(c)に示すように、上記感光性樹脂層2Aにおける未露光部分を溶解させて除去し、残存した感光性樹脂層2Aをコア2および平面視コ字状の突起部4のパターンに形成する。この平面視コ字状の突起部4は、上記のように、一個のフォトマスクを使用したフォトリソグラフィ法により、コアと同時に形成したため、コア2の一端面2aに対して高精度に設定された位置に、適正形状に形成されている。このように、光導波路部分W2 において、コア2の一端面2aに対して高精度に設定された位置に、基板部分位置決め用の一対の平面視コ字状の突起部(位置決め手段)4を適正形状に形成することが、本発明の大きな特徴の一つである。
上記コア2および平面視コ字状の突起部4の厚み(高さ)は、通常、5〜100μmの範囲内に設定され、フォトリソグラフィ工程における材料の解像性能を考慮すると、5〜60μmの範囲内が好ましい。コア2の幅は、通常、5〜60μmの範囲内に設定される。平面視コ字状の突起部4のスリット部分4aのスリット幅は、そのスリット部分4aに位置決めされる、基板部分E2 の位置決め板部5aの厚みよりも僅かに大きい値に設定され、通常、20〜200μmの範囲内に設定される。また、平面視コ字状を形成する線幅は、通常、10〜2000μmの範囲内に設定される。さらに、一対の突起部4の位置は、コア2の一端面2aから均等に配置される。そして、一対の突起部4を結ぶ線とコア2の一端面2aとの距離は、光学素子の大きさ等にもよるが、通常、0.3〜1.5mmの範囲内に設定される。また、一対の突起部4間の距離は、通常、3〜20mmの範囲内に設定される。
なお、上記コア2および平面視コ字状の突起部4の形成材料としては、例えば、上記アンダークラッド層1と同様の感光性樹脂があげられ、上記アンダークラッド層1およびオーバークラッド層3〔図6(b)参照〕の形成材料よりも屈折率が大きい材料が用いられる。この屈折率の調整は、例えば、上記アンダークラッド層1,コア2,オーバークラッド層3の各形成材料の種類の選択や組成比率を調整して行うことができる。
つぎに、成形型30〔図6(a)参照〕を準備する。この成形型30は、オーバークラッド層3〔図6(c)参照〕と、基板部分嵌合用の溝部3b〔図6(c)参照〕を有するオーバークラッド層3の延長部分3aとを同時に型成形するためのものである。この成形型30の下面には、図6(a)に、下から見上げた斜視図を示すように、上記オーバークラッド層3の形状に対応する型面を有する第1の凹部31と、上記平面視コ字状の突起部4を挿入する第2の凹部32とが形成されている。上記第1の凹部31は、上記延長部分3aを形成するための部分31aと、レンズ部3c〔図6(c)参照〕を形成するための部分31bとを有している。そして、上記延長部分形成用の部分31aには、上記基板部分嵌合用の溝部3bのうちのオーバークラッド層3に対応する部分を成形するための突条33が形成されている。また、上記成形型30の上面には、その使用の際にコア2の一端面2a〔図6(b)では右端面〕に位置合わせして成形型30を適正に位置決めするためのアライメントマーク(図示せず)が形成されており、このアライメントマークを基準とする適正な位置に、上記第1の凹部31および突条33が形成されている。
このため、上記成形型30のアライメントマークをコア2の一端面2aに位置合わせして上記成形型30をセットし、その状態で成形すると、コア2の一端面2aを基準として適正な位置に、オーバークラッド層3と、基板部分嵌合用の溝部3bとを同時に型成形することができるようになっている。また、上記成形型30のセットは、その成形型30の下面をアンダークラッド層1の表面に密着させることにより行われ、それにより、上記第1の凹部31の型面とアンダークラッド層1の表面とコア2の表面で囲まれる空間が成形空間34〔図6(b)参照〕になるようになっている。さらに、上記成形型30には、オーバークラッド層形成用の樹脂を上記成形空間34に注入するための注入孔(図示せず)が、上記第1の凹部31に連通した状態で形成されている。
なお、上記オーバークラッド層形成用の樹脂としては、例えば、上記アンダークラッド層1と同様の感光性樹脂があげられる。その場合は、上記成形型30としては、その成形型30を通して、上記成形空間34に満たされた感光性樹脂を、紫外線等の照射線により露光する必要があるため、照射線を透過する材料からなるもの(例えば石英製のもの)が用いられる。なお、オーバークラッド層形成用の樹脂として熱硬化性樹脂を用いてもよく、その場合は、上記成形型30としては、透明性は問われず、例えば、金属製,石英製のものが用いられる。
ついで、上記成形型30を、図6(b)に示すように、その成形型30のアライメントマークを上記コア2の一端面2aに位置合わせし成形型30全体を適正に位置決めした状態で、その成形型30の下面をアンダークラッド層1の表面に密着させる。この状態では、成形型30の第2の凹部32内に上記平面視コ字状の突起部4が挿入されている。そして、上記第1の凹部31および突条33の型面とアンダークラッド層1の表面とコア2の表面で囲まれた成形空間34に、オーバークラッド層形成用の樹脂を、上記成形型30に形成された注入孔から注入し、上記成形空間34を上記樹脂で満たす。つぎに、その樹脂が感光性樹脂の場合は、上記成形型30を通して紫外線等の照射線を露光した後に加熱処理を行い、上記樹脂が熱硬化性樹脂の場合は、加熱処理を行う。これにより、上記オーバークラッド層形成用の樹脂が硬化し、オーバークラッド層3と同時に、基板部分嵌合用の溝部3b(オーバークラッド層3の延長部分3a)が形成される。このとき、アンダークラッド層1とオーバークラッド層3とが同じ形成材料の場合は、アンダークラッド層1とオーバークラッド層3とは、その接触部分で同化する。ついで、脱型し、図6(c)に示すように、オーバークラッド層3と、基板部分嵌合用の一対の溝部3bとを得る。
上記基板部分嵌合用の溝部3bは、先に述べたように、上記成形型30を用いコア2の一端面2aを基準として形成したため、コア2の一端面2aに対して適正な位置に位置決めされている。また、上記オーバークラッド層3のレンズ部3cも、適正な位置に位置決めされている。このように、光導波路部分W2 において、コア2の一端面2aに対して適正な位置に正確に、基板部分嵌合用の溝部(嵌合部)3bを形成することが、本発明の大きな特徴の一つである。ただし、基板部分E2 の位置決めは、先に述べたように、上記平面視コ字状の突起部4を利用して行われ、上記嵌合部3bは、上記基板部分E2 を保持するためのものである。このため、上記成形型30の作製に、高水準の加工精度は不要であり、その分、成形型30のコストを低減することができる。
上記オーバークラッド層3の厚み(アンダークラッド層1の表面からの厚み)は、通常、0.5〜3mmの範囲内に設定される。また、上記基板部分嵌合用の溝部3bの大きさは、それに嵌合する基板部分E2 の嵌合板部5bの大きさに対応して形成され、例えば、溝の奥行き長さ〔図2(a)のX軸方向の長さ〕が1.0〜5.0mmの範囲内、溝の幅が0.2〜2.0mmの範囲内に設定される。
その後、図6(d)に示すように、上記基板部分位置決め用の一対の平面視コ字状の突起部4の間の、シート材10とアンダークラッド層1との積層部分に、基板部分E2 を挿通させるための貫通孔20をパンチャー等で形成する。このようにして、シート材10の表面に、アンダークラッド層1,コア2,オーバークラッド層3を備え、基板部分位置決め用の一対の平面視コ字状の突起部4および基板部分嵌合用の一対の溝部3bが形成された光導波路部分W2 を得、上記(1)の光導波路部分W2 の作製工程が完了する。
つぎに、上記(2)の基板部分E2 の作製工程について説明する。まず、上記整形基板5の基材となる基板5A〔図7(a)参照〕を準備する。この基板5Aの形成材料としては、例えば、金属,樹脂等があげられる。なかでも、加工容易性および寸法安定性の観点から、ステンレス製の基板5Aが好ましい。また、上記基板5Aの厚みは、例えば、0.02〜0.1mmの範囲内に設定される。
ついで、図7(a)に示すように、上記基板5Aの表面の所定領域に、感光性ポリイミド樹脂等の、絶縁層形成用の感光性樹脂が溶媒に溶解しているワニスを塗布した後、必要に応じて、それを加熱処理して乾燥させ、絶縁層形成用の感光性樹脂層を形成する。そして、その感光性樹脂層を、フォトマスクを介して紫外線等の照射線により露光することにより、所定形状の絶縁層6に形成する。絶縁層6の厚みは、通常、5〜15μmの範囲内に設定される。
つぎに、図7(b)に示すように、上記絶縁層6の表面に、光学素子実装用パッド7およびそれに接続する電気回路(図示せず)を形成する。この実装用パッド(電気回路を含む)7の形成は、例えば、つぎのようにして行われる。すなわち、まず、上記絶縁層6の表面に、スパッタリングまたは無電解めっき等により金属層(厚み60〜260nm程度)を形成する。この金属層は、後の電解めっきを行う際のシード層(電解めっき層形成の素地となる層)となる。ついで、上記基板5A,絶縁層6およびシード層からなる積層体の両面に、ドライフィルムレジストを貼着した後、上記シード層が形成されている側のドライフィルムレジストに、フォトリソグラフィ法により上記実装用パッド7のパターンの孔部を同時に形成し、その孔部の底に上記シード層の表面部分を露呈させる。つぎに、電解めっきにより、上記孔部の底に露呈した上記シード層の表面部分に、電解めっき層(厚み5〜20μm程度)を積層形成する。そして、上記ドライフィルムレジストを水酸化ナトリウム水溶液等により剥離する。その後、上記電解めっき層が形成されていないシード層部分をソフトエッチングにより除去し、残存した電解めっき層とその下のシード層とからなる積層部分を実装用パッド(電気回路を含む)7に形成する。
ついで、図7(c)に示すように、上記基板5Aを、実装用パッド7に対して適正な位置に位置決め板部5aおよび嵌合板部5bを有する整形基板5に形成する。この整形基板5の形成は、例えば、つぎのようにして行われる。すなわち、まず、上記基板5Aの裏面を、ドライフィルムレジストで覆う。そして、実装用パッド7に対して適正な位置に位置決め板部5aおよび嵌合板部5bが形成されるよう、フォトリソグラフィ法により、目的とする形状のドライフィルムレジストの部分を残す。そして、その残ったドライフィルムレジストの部分以外の露呈している基板5A部分を、塩化第2鉄水溶液を用いてエッチングすることにより除去する。これにより、上記基板5Aが、位置決め板部5aおよび嵌合板部5bを有する整形基板5に形成される。つぎに、上記ドライフィルムレジストを水酸化ナトリウム水溶液等により剥離する。なお、上記位置決め板部5aの大きさは、例えば、縦の長さL1 が0.1〜1.0mmの範囲内、横の長さL2 が1.0〜5.0mmの範囲内に設定される。また、嵌合板部5bの大きさは、例えば、縦の長さL3 が0.5〜2.0mmの範囲内、横の長さL4 が1.0〜5.0mmの範囲内に設定される。このように、基板部分E2 において、実装用パッド7に対して適正な位置に正確に、位置決め板部(被位置決め部)5aおよび嵌合板部(被嵌合部)5bを形成することが、本発明の大きな特徴の一つである。
そして、図7(d)に示すように、実装用パッド7に、光学素子8を実装した後、上記光学素子8およびその周辺部を、透明樹脂によりポッティング封止する。上記光学素子8の実装は、実装機を用いて行われ、その実装機に備わっている位置決めカメラ等の位置決め装置により、実装用パッド7に正確に位置決めされて行われる。これにより、嵌合板部5bを有する整形基板5と、絶縁層6と、実装用パッド7と、光学素子8と、透明樹脂層9とを備えた基板部分E2 を得、上記(2)の基板部分E2 の作製工程が完了する。この基板部分E2 では、先に述べたように、実装用パッド7を基準として、嵌合板部5bが形成されているため、その実装用パッド7に実装された光学素子8と嵌合板部5bとは適正な位置関係にある。
つぎに、前記(3)の光導波路部分W2 と基板部分E2 との結合工程について説明する。すなわち、基板部分E2 〔図4,図7(d)参照〕の光学素子8の表面(発光部または受光部)を、光導波路部分W2 (図3参照)のコア2の一端面2a側に向ける。その状態で、光導波路部分W2 における基板部分位置決め用の一対の平面視コ字状の突起部4の内側面に、上記基板部分E2 における位置決め板部5aを当接させて位置決めするとともに、光導波路部分W2 における基板部分嵌合用の一対の溝部3bに、上記基板部分E2 における嵌合板部5bを嵌合させ、上記光導波路部分W2 と基板部分E2 とを一体化する〔図1および図2(a),(b)参照〕。このとき、位置決め板部5aの下端縁を上記アンダークラッド層1の表面に当接させる。なお、上記突起部4と位置決め板部5aとの位置決め部分および溝部3bと嵌合板部5bとの嵌合部分の少なくとも一方を接着剤で固定してもよい。このように接着剤で固定すると、上記光導波路部分W2 と基板部分E2 との位置関係を、衝撃や振動等に対して、より安定的に維持することができる。このようにして、目的とする光センサモジュールが完成する。
ここで、先に述べたように、上記光導波路部分W2 では、コア2の一端面2aと基板部分位置決め用の突起部4とが高精度な位置関係にあるとともに、コア2の一端面2aと基板部分嵌合用の溝部3bとが適正な位置関係にある。また、上記光学素子8が実装された基板部分E2 では、光学素子8と上記突起部4に位置決めされる位置決め板部5aとが適正な位置関係にあるとともに、光学素子8と上記溝部3bに嵌合する嵌合板部5bとが適正な位置関係にある。その結果、上記突起部4に上記位置決め板部5aが位置決めされ、かつ上記溝部3bに上記嵌合板部5bを嵌合してなる上記光センサモジュールでは、コア2の一端面2aと光学素子8とが、調芯作業を経ることなく、自動的に高精度な位置関係になる。このため、上記光センサモジュールは、コア2の端面2aと光学素子8との間で光伝播が適正に行われるようになる。その結果、光学素子を必ずしも高出力のものとしなくてもよく、その分、光学素子8のコストを低減することができる。このように、光導波路部分W2 における基板部分位置決め用の突起部(位置決め手段)4に、上記基板部分E2 における位置決め板部(被位置決め部)5aを位置決めするとともに、光導波路部分W2 における基板部分嵌合用の溝部(嵌合部)3bに、上記基板部分E2 における嵌合板部(被嵌合部)5bを嵌合させ、コア2の一端面2aと光学素子8とを高精度に位置決めすることが、本発明の大きな特徴の一つである。
なお、この実施の形態では、光導波路部分W2 における基板部分位置決め用の突起部4を、平面視コ字状に形成したが、基板部分E2 を位置決めすることができれば、他の形状でもよく、例えば、上記平面視コ字状の一部を構成する平面視L字状でもよい。
また、上記実施の形態では、光導波路部分W2 と基板部分E2 との結合は、突起部4のスリット幅および溝部3bの溝幅が狭いため、通常、光学顕微鏡等の補助器具を使用して行われる。
図8は、本発明の光センサモジュールの他の実施の形態の光導波路部分の一端部を模式的に示す斜視図である。この実施の形態の光センサモジュールは、図1に示す実施の形態の光センサモジュールにおいて、基板部分E2 の位置決めがより簡単になるよう、光導波路部分W3 の一対の溝部13,14にテーパー部分13a,14aが形成されているとともに、一対の突起部15,16のうちの一方(図示の左側)の突起部15にテーパー部分15aが形成され、他方(図示の右側)の突起部16が平行な2本の帯状体16aからなるガイド部に形成されている。それ以外の部分は、図1に示す実施の形態と同様であり、同様の部分には、同じ符号を付している。
より詳しく説明すると、一対の上記溝部13,14の、オーバークラッド層3の上面部分に対応する部分は、オーバークラッド層3の上面から下方にいくにつれて徐々に幅が狭く形成されたテーパー部分13a,14aとなっている。このテーパー部分13a,14aは、溝部13,14の長さ方向(オーバークラッド層3の厚み方向)の途中まで形成されており、それよりも下側部分は、図1に示す実施の形態と同様に、均一幅に形成されている。テーパー部分13a,14aの下端の位置は、光導波路部分W3 と基板部分E2 とを結合させた際に、基板部分E2 の嵌合板部5bの下端縁がくる位置またはそれよりも上側に設定することが好ましい。上記テーパー部分13a,14aの上端(オーバークラッド層3の上面)での幅は、目視でも容易に基板部分E2 の嵌合板部5bを嵌合できる寸法にする観点から、例えば、1.0〜3.0mmの範囲内に設定される。テーパー部分13a,14aの下端およびそれよりも下側の均一幅部分の幅は、例えば、0.2〜0.4mmの範囲内に設定される。さらに、この実施の形態では、一方(図示の左側)の溝部13よりも、他方(図示の右側)の溝部14の方が、1.0〜3.0mm程度奥行き長さが長く形成されている。
また、一対の上記突起部15,16のうち、一方(図示の左側)の突起部15は、平面視コ字状に形成され、そのコ字状の開口部分は、開口端から奥方にいくにつれて徐々に幅が狭く形成されたテーパー部分15aとなっている。このテーパー部分15aは、コ字状の奥方向の途中まで形成されており、それよりも奥側部分は、図1に示す実施の形態と同様に、均一幅に形成されている。上記テーパー部分15aの開口端の開口幅は、上記溝部13,14のテーパー部分13a,14aの下端の幅(0.2〜0.4mm)よりも僅かに広く設定されることが好ましい。上記突起部15のテーパー部分15aの奥端およびそれよりも奥側の均一幅部分の幅は、例えば、0.1mm程度、その長さは、例えば、1.0mm程度に設定される。平面視コ字状を形成する線幅は、0.05〜0.2mmの範囲内が好ましい。
他方(図示の右側)の突起部16は、平行な2本の帯状体16aからなるガイド部に形成されている。これら2本の帯状体16aの間の幅は、上記溝部13,14のテーパー部分13a,14aの下端の幅(0.2〜0.4mm)よりも僅かに広く設定されることが好ましい。上記2本の帯状体16aの長さは、例えば、1.0mm以上に設定されることが好ましい。
そして、光導波路部分W3 と基板部分E2 との結合は、つぎのようにして行われる。まず、基板部分E2 の光学素子8の表面を、光導波路部分W3 のコア2の一端面2a側に向け、その状態で、基板部分E2 を奥行き長さが長い方の溝部(図示の右側の溝部)14側に偏らせるとともに、基板部分E2 の嵌合板部5bを、光導波路部分W3 の溝部13,14の上方に位置決めする。ついで、基板部分E2 を下降させ(図示の矢印F1)、基板部分E2 の嵌合板部5bを、溝部13,14のテーパー部分13a,14aから挿入し、基板部分E2 の位置決め板部5aの下端縁を、上記アンダークラッド層1の表面に当接させる。このとき、上記溝部13,14のテーパー部分13a,14aにより、基板部分E2 は、Y軸方向の位置が粗調整され、他方(図示の右側)の突起部16の平行な2本の帯状体16aの間に、基板部分E2 の位置決め板部5aの下端縁が位置決めされる。つぎに、基板部分E2 を奥行き長さが短い方の溝部13側(図示の左側)にスライドさせ(図示の矢印F2)、基板部分E2 の位置決め板部5aの左端縁を、一方(図示の左側)の突起部15のテーパー部分15aから挿入し、その突起部15の奥端面に当接させる。このとき、上記突起部15のテーパー部15aにより、基板部分E2 は、Y軸方向の位置が適正に調整され、上記奥端面への当接により、X軸方向の位置が適正に調整される。このようにして、光導波路部分W3 と基板部分E2 とを一体化し、光センサモジュールを得る。
この実施の形態では、溝部13,14および突起部15に上記テーパー部分13a,14a,15aが形成されているため、光学顕微鏡等の補助器具を使用することなく、光導波路部分W3 と基板部分E2 との結合を行うことができる。
なお、この実施の形態では、溝部13,14のテーパー部分13a,14aは、溝部13,14の長さ方向の途中まで形成されていたが、溝部13,14に嵌合する嵌合板部5bの下端縁がアンダークラッド層1の表面に当接する場合には、溝部13,14のテーパー部分13a,14aは、溝部13,14の下端(アンダークラッド層1の表面)まで形成されていてもよい。
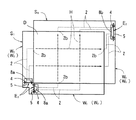
そして、上記本発明の光センサモジュールは、例えば、図9に示すように、2つのL字形の光センサモジュールS1 ,S2 に形成し、それらを対向させ四角形の枠状にして用いることにより、タッチパネルにおける指等の触れ位置の検知手段として用いることができる。すなわち、一方のL字形の光センサモジュールS1 は、角部の2箇所に、半導体レーザ等の発光素子8aが実装された基板部分E2 が嵌合され、光Hが出射するコア2の他端面2bおよびオーバークラッド層3のレンズ面が、上記枠状の内側に向けられている。他方のL字形の光センサモジュールS2 は、角部の1箇所に、フォトダイオード等の受光素子8bが実装された基板部分E2 が嵌合され、光Hが入射するオーバークラッド層3のレンズ面およびコア2の他端面2bが、上記枠状の内側に向けられている。そして、上記2つのL字形の光センサモジュールを、タッチパネルの四角形のディスプレイDの画面を囲むようにして、その画面周縁部の四角形に沿って設置し、一方のL字形の光センサモジュールS1 からの出射光Hを他方のL字形の光センサモジュールS2 で受光できるようする。これにより、上記出射光Hが、ディスプレイDの画面上において、その画面と平行に格子状に走るようにすることができる。このため、指でディスプレイDの画面に触れると、その指が出射光Hの一部を遮断し、その遮断された部分を、受光素子8bで感知することにより、上記指が触れた部分の位置を検知することができる。なお、図9では、コア2を鎖線で示しており、その鎖線の太さがコア2の太さを示しているとともに、コア2の数を略して図示している。
なお、上記各実施の形態では、基板部分E2 の作製に、絶縁層6を形成したが、この絶縁層6は、金属製基板のような通電性を有する基板5Aと実装用パッド7との短絡を防止するためのものである。そのため、基板5Aが絶縁性を有するものである場合は、絶縁層6を形成することなく、上記基板5Aに直接、実装用パッド7を形成してもよい。
さらに、上記各実施の形態では、オーバークラッド層3の他端部〔図2(b)では左端部〕をレンズ部3cに形成したが、光センサモジュールの用途によっては、レンズ部3cに形成することなく平面状に形成してもよい。
つぎに、実施例について比較例と併せて説明する。但し、本発明は、実施例に限定されるわけではない。
〔アンダークラッド層,オーバークラッド層(延長部分を含む)の形成材料〕
ビスフェノキシエタノールフルオレングリシジルエーテル(成分A)35重量部、脂環式エポキシ樹脂である3’,4’−エポキシシクロヘキシルメチル−3,4−エポキシシクロヘキサンカルボキシレート(ダイセル化学工業社製、セロキサイド2021P)(成分B)40重量部、(3’,4’−エポキシシクロヘキサン)メチル−3’,4’−エポキシシクロヘキシル−カルボキシレート(ダイセル化学工業社製、セロキサイド2081)(成分C)25重量部、4,4’−ビス〔ジ(β−ヒドロキシエトキシ)フェニルスルフィニオ〕フェニルスルフィド−ビス−ヘキサフルオロアンチモネートの50重量%プロピオンカーボネート溶液(成分D)2重量部とを混合することにより、アンダークラッド層およびオーバークラッド層の形成材料を調製した。
ビスフェノキシエタノールフルオレングリシジルエーテル(成分A)35重量部、脂環式エポキシ樹脂である3’,4’−エポキシシクロヘキシルメチル−3,4−エポキシシクロヘキサンカルボキシレート(ダイセル化学工業社製、セロキサイド2021P)(成分B)40重量部、(3’,4’−エポキシシクロヘキサン)メチル−3’,4’−エポキシシクロヘキシル−カルボキシレート(ダイセル化学工業社製、セロキサイド2081)(成分C)25重量部、4,4’−ビス〔ジ(β−ヒドロキシエトキシ)フェニルスルフィニオ〕フェニルスルフィド−ビス−ヘキサフルオロアンチモネートの50重量%プロピオンカーボネート溶液(成分D)2重量部とを混合することにより、アンダークラッド層およびオーバークラッド層の形成材料を調製した。
〔コアおよび突起部の形成材料〕
上記成分A:70重量部、1,3,3−トリス{4−〔2−(3−オキセタニル)〕ブトキシフェニル}ブタン:30重量部、上記成分D:1重量部を乳酸エチルに溶解することにより、コアおよび突起部の形成材料を調製した。
上記成分A:70重量部、1,3,3−トリス{4−〔2−(3−オキセタニル)〕ブトキシフェニル}ブタン:30重量部、上記成分D:1重量部を乳酸エチルに溶解することにより、コアおよび突起部の形成材料を調製した。
〔実施例1〕
〔光導波路部分の作製〕
まず、ステンレス製のシート材(厚み50μm)の表面に、上記アンダークラッド層の形成材料をアプリケーターにより塗布した後、2000mJ/cm2 の紫外線(波長365nm)照射による露光を行うことにより、アンダークラッド層(厚み20μm)を形成した〔図5(a)参照〕。
〔光導波路部分の作製〕
まず、ステンレス製のシート材(厚み50μm)の表面に、上記アンダークラッド層の形成材料をアプリケーターにより塗布した後、2000mJ/cm2 の紫外線(波長365nm)照射による露光を行うことにより、アンダークラッド層(厚み20μm)を形成した〔図5(a)参照〕。
ついで、上記アンダークラッド層の表面に、上記コアおよび突起部の形成材料をアプリケーターにより塗布した後、100℃×15分間の乾燥処理を行い、感光性樹脂層を形成した〔図5(b)参照〕。つぎに、その上方に、コアおよび突起部のパターンと同形状の開口パターンが形成された合成石英系のクロムマスク(フォトマスク)を配置した。そして、その上方から、プロキシミティ露光法にて4000mJ/cm2 の紫外線(波長365nm)照射による露光を行った後、80℃×15分間の加熱処理を行った。つぎに、γ−ブチロラクトン水溶液を用いて現像することにより、未露光部分を溶解除去した後、120℃×30分間の加熱処理を行うことにより、断面四角形のコア(厚み50μm、幅150μm)および一対の平面視コ字状の突起部(厚み50μm、平面視コ字状のスリット部分のスリット幅0.1mm、平面視コ字状の線幅0.2mm)を形成した。一対の突起部の位置は、コアの一端面から均等に配置した。そして、一対の突起部を結ぶ線とコアの一端面との距離を0.3mmとし、一対の突起部間の距離を8mmとした〔図5(c)参照〕。
つぎに、オーバークラッド層と、基板部分位置決め用の溝部(オーバークラッド層の延長部分)とを同時に型成形する石英製の成形型〔図6(a)参照〕を、コアの一端面を基準として適正位置にセットした〔図6(b)参照〕。そして、上記オーバークラッド層およびその延長部分の形成材料を、成形空間に注入した後、その成形型を通して2000mJ/cm2 の紫外線照射による露光を行った。つづいて、120℃×15分間の加熱処理を行った後、脱型し、オーバークラッド層(アンダークラッド層の表面からの厚み1mm)と、基板部分嵌合用の溝部とを得た〔図6(c)参照〕。上記溝部の寸法は、奥行き長さが1.5mm、幅が0.2mm、対向する溝部の底面間の距離が14.0mmであった。
〔基板部分の作製〕
ステンレス製基板〔25mm×30mm×50μm(厚み)〕の表面の一部分に、感光性ポリイミド樹脂からなる絶縁層(厚み10μm)を形成した〔図7(a)参照〕。ついで、セミアディティブ法により、上記絶縁層の表面に、銅/ニッケル/クロム合金からなるシード層と電解銅めっき層(厚み10μm)とを積層形成し、さらに金/ニッケルめっき処理(金/ニッケル=0.2/2μm)を施し、光学素子実装用パッドおよびセカンドボンド用パッドならびに電気回路を形成した〔図7(b)参照〕。
ステンレス製基板〔25mm×30mm×50μm(厚み)〕の表面の一部分に、感光性ポリイミド樹脂からなる絶縁層(厚み10μm)を形成した〔図7(a)参照〕。ついで、セミアディティブ法により、上記絶縁層の表面に、銅/ニッケル/クロム合金からなるシード層と電解銅めっき層(厚み10μm)とを積層形成し、さらに金/ニッケルめっき処理(金/ニッケル=0.2/2μm)を施し、光学素子実装用パッドおよびセカンドボンド用パッドならびに電気回路を形成した〔図7(b)参照〕。
つぎに、上記光学素子実装用パッドに対して適正な位置に嵌合板部が形成されるよう、ドライフィルムレジストを利用してエッチングすることにより、ステンレス製基板部分を、位置決め板部および嵌合板部を有する整形基板に形成した。その後、上記ドライフィルムレジストを水酸化ナトリウム水溶液により剥離した〔図7(c)参照〕。
そして、上記光学素子実装用パッドの表面に、銀ペーストを塗布した後、高精度ダイボンダ(実装装置)を用いて、上記銀ペースト上に、ワイヤーボンディングタイプの発光素子(Optwell社製、VCSELチップ SM85−2N001)を実装した。ついで、キュア処理(180℃×1時間)し、上記銀ペーストを硬化させた。その後、φ25μmの金線を用いて、ワイヤーボンディングにて金製のワイヤループを張り、上記光学素子およびその周辺部を、LED用の透明樹脂(日東電工社製、NT樹脂)によりポッティング封止した〔図7(d)参照〕。このようにして、基板部分を作製した。この基板部分の位置決め板部の寸法は、上記一対の突起部の寸法に合わせて形成し、嵌合板部の寸法は、上記一対の溝部の寸法に合わせて形成した。
〔光センサモジュールの製造〕
まず、ピンセットで基板部分を挟み、光学顕微鏡で見ながら、上記光導波路部分における基板部分位置決め用の一対の平面視コ字状の突起部の内側面に、上記基板部分における位置決め板部を当接させて位置決めするとともに、光導波路部分における基板部分嵌合用の一対の溝部に、上記基板部分における嵌合板部を嵌合させ、上記位置決め板部の下端縁を上記アンダークラッド層の表面に当接させた。その後、その位置決め部および嵌合部を接着剤で固定した。このようにして、光センサモジュールを製造した〔図1および図2(a),(b)参照〕。
まず、ピンセットで基板部分を挟み、光学顕微鏡で見ながら、上記光導波路部分における基板部分位置決め用の一対の平面視コ字状の突起部の内側面に、上記基板部分における位置決め板部を当接させて位置決めするとともに、光導波路部分における基板部分嵌合用の一対の溝部に、上記基板部分における嵌合板部を嵌合させ、上記位置決め板部の下端縁を上記アンダークラッド層の表面に当接させた。その後、その位置決め部および嵌合部を接着剤で固定した。このようにして、光センサモジュールを製造した〔図1および図2(a),(b)参照〕。
〔実施例2〕
上記実施例1において、一対の溝部の、オーバークラッド層の上面部分に対応する部分を、テーパー部分に形成した(図8参照)。その溝部の寸法を図10(a),(b)に示した。図10(a),(b)では、奥行き長さが長い方(奥行き長さ5.0mm)の溝部14を示しており、奥行き長さが短い方の溝部13(図8参照)は、奥行き長さを3.0mmとし、それ以外の寸法は、奥行き長さが長い方の溝部14と同様とした。また、図10(c)に示すように、一対の突起部15,16のうち、奥行き長さが短い方の13側にある突起部(図示の左側)15を平面視コ字状に形成するとともに、そのコ字状の開口部分をテーパー部分15aに形成し、奥行き長さが長い溝部14側にある突起部(図示の右側)16を平行な2本の帯状体16aからなるガイド部に形成した。なお、図10(c)には、突起部15,16の寸法も示している。
上記実施例1において、一対の溝部の、オーバークラッド層の上面部分に対応する部分を、テーパー部分に形成した(図8参照)。その溝部の寸法を図10(a),(b)に示した。図10(a),(b)では、奥行き長さが長い方(奥行き長さ5.0mm)の溝部14を示しており、奥行き長さが短い方の溝部13(図8参照)は、奥行き長さを3.0mmとし、それ以外の寸法は、奥行き長さが長い方の溝部14と同様とした。また、図10(c)に示すように、一対の突起部15,16のうち、奥行き長さが短い方の13側にある突起部(図示の左側)15を平面視コ字状に形成するとともに、そのコ字状の開口部分をテーパー部分15aに形成し、奥行き長さが長い溝部14側にある突起部(図示の右側)16を平行な2本の帯状体16aからなるガイド部に形成した。なお、図10(c)には、突起部15,16の寸法も示している。
〔光センサモジュールの製造〕
まず、指先で基板部分を挟み、基板部分を奥行き長さが長い方の溝部14側に偏らせるとともに、基板部分の嵌合板部を、光導波路部分の溝部13,14の上方に位置決めした(図8参照)。ついで、基板部分を下降させ、基板部分の嵌合板部を、溝部13,14のテーパー部分13a,14aから挿入し、基板部分の位置決め板部の下端縁を、上記アンダークラッド層の表面に当接させた。このとき、上記溝部13,14のテーパー部分13a,14aにより、基板部分は、Y軸方向の位置が粗調整され、他方(図示の右側)の突起部16の平行な2本の帯状体16aの間に、基板部分の位置決め板部の下端縁が位置決めされた。つぎに、基板部分を奥行き長さが短い方の溝部13側にスライドさせ、基板部分の位置決め板部の左端縁を、一方(図示の左側)の突起部15のテーパー部分15aから挿入し、その突起部15の奥端面に当接させた。このとき、上記突起部15のテーパー部15aにより、基板部分は、Y軸方向の位置が適正に調整され、上記奥端面への当接により、X軸方向の位置が適正に調整された。その後、その位置決め部および嵌合部を接着剤で固定した。このようにして、光センサモジュールを製造した(図8参照)。なお、この光導波路部分と基板部分との結合には、光学顕微鏡を使用しなかった。
まず、指先で基板部分を挟み、基板部分を奥行き長さが長い方の溝部14側に偏らせるとともに、基板部分の嵌合板部を、光導波路部分の溝部13,14の上方に位置決めした(図8参照)。ついで、基板部分を下降させ、基板部分の嵌合板部を、溝部13,14のテーパー部分13a,14aから挿入し、基板部分の位置決め板部の下端縁を、上記アンダークラッド層の表面に当接させた。このとき、上記溝部13,14のテーパー部分13a,14aにより、基板部分は、Y軸方向の位置が粗調整され、他方(図示の右側)の突起部16の平行な2本の帯状体16aの間に、基板部分の位置決め板部の下端縁が位置決めされた。つぎに、基板部分を奥行き長さが短い方の溝部13側にスライドさせ、基板部分の位置決め板部の左端縁を、一方(図示の左側)の突起部15のテーパー部分15aから挿入し、その突起部15の奥端面に当接させた。このとき、上記突起部15のテーパー部15aにより、基板部分は、Y軸方向の位置が適正に調整され、上記奥端面への当接により、X軸方向の位置が適正に調整された。その後、その位置決め部および嵌合部を接着剤で固定した。このようにして、光センサモジュールを製造した(図8参照)。なお、この光導波路部分と基板部分との結合には、光学顕微鏡を使用しなかった。
〔比較例〕
上記実施例1において、光導波路部分における基板部分位置決め用の一対の平面視コ字状の突起部を形成しないものとした。その代わり、オーバークラッド層および基板部分嵌合用の溝部を型成形する際に用いる成形型を、実施例1よりも高水準の加工精度で作製した。また、基板部分においては、位置決め板部を形成しないものとした。そして、光導波路部分における基板部分嵌合用の一対の溝部に、上記基板部分における嵌合板部を嵌合させ、上記嵌合板部の下端縁を上記アンダークラッド層の表面に当接させた。その後、その嵌合部を接着剤で固定した。このようにして、光センサモジュールを製造した。
上記実施例1において、光導波路部分における基板部分位置決め用の一対の平面視コ字状の突起部を形成しないものとした。その代わり、オーバークラッド層および基板部分嵌合用の溝部を型成形する際に用いる成形型を、実施例1よりも高水準の加工精度で作製した。また、基板部分においては、位置決め板部を形成しないものとした。そして、光導波路部分における基板部分嵌合用の一対の溝部に、上記基板部分における嵌合板部を嵌合させ、上記嵌合板部の下端縁を上記アンダークラッド層の表面に当接させた。その後、その嵌合部を接着剤で固定した。このようにして、光センサモジュールを製造した。
〔光結合損失〕
上記実施例1,2および比較例の光センサモジュールの発光素子に電流を流し、発光素子から光を出射させ、光センサモジュールの他端部から出射された光の強度を測定し、光結合損失を算出した。その結果、光結合損失は、実施例1,2が0.5dB、比較例が3.0dBであった。
上記実施例1,2および比較例の光センサモジュールの発光素子に電流を流し、発光素子から光を出射させ、光センサモジュールの他端部から出射された光の強度を測定し、光結合損失を算出した。その結果、光結合損失は、実施例1,2が0.5dB、比較例が3.0dBであった。
この結果から、上記実施例1,2および比較例の製造方法では、いずれも、光導波路部分のコアと基板部分の発光素子との調芯作業をしなくても、得られた光センサモジュールは、光伝播することがわかる。しかしながら、実施例1,2の光センサモジュールの方が、光結合損失が小さく、優れていることがわかる。
〔位置決めに要する時間〕
上記実施例1および比較例では、光導波路部分と基板部分との結合に、20秒を要し、上記実施例2では、5秒を要した。
上記実施例1および比較例では、光導波路部分と基板部分との結合に、20秒を要し、上記実施例2では、5秒を要した。
この結果から、上記実施例2では、溝部および突起部に上記テーパー部分が形成されているため、光学顕微鏡等の補助器具を使用することなく、しかも、速く、光導波路部分と基板部分とを結合できることがわかる。すなわち、生産性に優れている。
また、上記実施例1において、基板部分位置決め用の突起部の形状を、平面視コ字状に代えて、その平面視コ字状の一部を構成する平面視L字状に形成した場合も、上記と同様の結果を得た。
本発明の光センサモジュールは、タッチパネルにおける指等の触れ位置の検知手段、または音声や画像等のデジタル信号を高速で伝送,処理する情報通信機器,信号処理装置等に用いることができる。
W2 光導波路部分
E2 基板部分
2 コア
2a 一端面
3b 溝部
4 突起部
5a 位置決め板部
5b 嵌合板部
8 光学素子
E2 基板部分
2 コア
2a 一端面
3b 溝部
4 突起部
5a 位置決め板部
5b 嵌合板部
8 光学素子
Claims (6)
- 光導波路部分と、光学素子が実装された基板部分とを結合させてなる光センサモジュールの製造方法であって、上記光導波路部分の作製工程が、アンダークラッド層の表面に,一個のフォトマスクを使用したフォトリソグラフィ法により,光路用の線状のコアを形成すると同時に,そのコアの端部に対して適正位置となる部分に,基板部分位置決め用の位置決め手段を形成する工程と、型成形法により,上記コアを被覆するオーバークラッド層の形成と同時に,そのオーバークラッド層の部分に,上記基板部分嵌合用の嵌合部を形成する工程とを備え、上記基板部分の作製工程が、基板上に光学素子実装用パッドを配設し,その基板の,光学素子実装用パッドに対する適正位置に,上記基板部分位置決め用の位置決め手段に位置決めされる被位置決め部を形成すると同時に,上記基板部分嵌合用の嵌合部に嵌合する被嵌合部を形成する工程と、上記光学素子実装用パッドに光学素子を実装する工程とを備え、上記光導波路部分と上記基板部分とを結合させ光センサモジュールにする工程が、上記光導波路部分の上記位置決め手段を利用して,上記基板部分の上記被位置決め部を位置決めするとともに,上記光導波路部分の上記嵌合部に,上記基板部分の上記被嵌合部を嵌合させる工程を備えていることを特徴とする光センサモジュールの製造方法。
- 上記光導波路部分の上記位置決め手段を、平面視コ字状または平面視L字状の突起部に形成し、上記基板部分の上記被位置決め部を、上記突起部の内側面に当接する板部に形成する請求項1記載の光センサモジュールの製造方法。
- 上記光導波路部分の上記嵌合部を、オーバークラッド層の厚み方向に沿う溝部に形成するとともに、そのオーバークラッド層の上面部分に対応する溝部の部分の幅を、オーバークラッド層の上面から下方にいくにつれて徐々に狭く形成し、上記基板部分の上記被嵌合部を、上記溝部に嵌合する板部に形成し、上記光導波路部分の上記位置決め手段を、平面視コ字状の突起部に形成するとともに、そのコ字状の開口部分の幅を、開口端から奥方にいくにつれて徐々に狭く形成し、上記基板部分の上記被位置決め部を、上記突起部の内側面に当接する板部に形成し、光導波路部分と基板部分との結合を、光導波路部分の上記溝部の上端から基板部分の上記被嵌合部を挿入した後、平面視コ字状の上記突起部の開口端から基板部分の上記被位置決め部を挿入し奥端に当接させることにより行う請求項1記載の光センサモジュールの製造方法。
- 光導波路部分と、光学素子が実装された基板部分とを結合させてなる光センサモジュールであって、上記光導波路部分が、アンダークラッド層と、このアンダークラッド層の表面に形成された光路用の線状のコアと、このコアの端部に対して適正位置となる部分に形成された基板部分位置決め用の位置決め手段と、上記コアを被覆するオーバークラッド層と、このオーバークラッドの所定部分に形成された基板部分嵌合用の嵌合部とを備え、上記基板部分が、上記基板部分位置決め用の位置決め手段に位置決めされる被位置決め部および上記基板部分嵌合用の嵌合部に嵌合する被嵌合部を有する基板と、その基板上の所定部分に配設された光学素子実装用パッドと、この光学素子実装用パッドに実装された光学素子とを備え、上記光導波路部分と上記基板部分との結合が、上記光導波路部分の上記位置決め手段を利用した,上記基板部分の上記被位置決め部の位置決めと、上記光導波路部分の上記嵌合部への,上記基板部分の上記被嵌合部の嵌合とがなされて行われていることを特徴とする、請求項1の製造方法により得られた光センサモジュール。
- 上記光導波路部分の上記位置決め手段が、平面視コ字状または平面視L字状の突起部に形成され、上記基板部分の上記被位置決め部が、上記突起部の内側面に当接する板部に形成されている請求項4記載の光センサモジュール。
- 上記光導波路部分の上記嵌合部が、オーバークラッド層の厚み方向に沿う溝部に形成されているとともに、そのオーバークラッド層の上面部分に対応する溝部の部分の幅が、オーバークラッド層の上面から下方にいくにつれて徐々に狭く形成され、上記基板部分の上記被嵌合部が、上記溝部に嵌合する板部に形成され、上記光導波路部分の上記位置決め手段が、平面視コ字状の突起部に形成されているとともに、そのコ字状の開口部分の幅が、開口端から奥にいくにつれて徐々に狭く形成され、上記基板部分の上記被位置決め部が、上記突起部の内側面に当接する板部に形成されている請求項4記載の光センサモジュール。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010030802A JP2011102955A (ja) | 2009-10-14 | 2010-02-16 | 光センサモジュールの製造方法およびそれによって得られた光センサモジュール |
| TW099127757A TW201129836A (en) | 2009-10-14 | 2010-08-19 | Method of manufacturing optical sensor module and optical sensor module obtained thereby |
| KR1020100097971A KR20110040689A (ko) | 2009-10-14 | 2010-10-07 | 광 센서 모듈의 제조 방법 및 그것에 의해서 얻어진 광 센서 모듈 |
| EP10186989A EP2312358A2 (en) | 2009-10-14 | 2010-10-08 | Method of manufacturing optical sensor module and optical sensor module obtained thereby |
| CN2010105042943A CN102043199A (zh) | 2009-10-14 | 2010-10-08 | 光传感器组件的制造方法和由该方法获得的光传感器组件 |
| US12/900,964 US20110085758A1 (en) | 2009-10-14 | 2010-10-08 | Method of manufacturing optical sensor module and optical sensor module obtained thereby |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009237771 | 2009-10-14 | ||
| JP2009237771 | 2009-10-14 | ||
| JP2010030802A JP2011102955A (ja) | 2009-10-14 | 2010-02-16 | 光センサモジュールの製造方法およびそれによって得られた光センサモジュール |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011102955A true JP2011102955A (ja) | 2011-05-26 |
Family
ID=43499955
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010030802A Pending JP2011102955A (ja) | 2009-10-14 | 2010-02-16 | 光センサモジュールの製造方法およびそれによって得られた光センサモジュール |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20110085758A1 (ja) |
| EP (1) | EP2312358A2 (ja) |
| JP (1) | JP2011102955A (ja) |
| KR (1) | KR20110040689A (ja) |
| CN (1) | CN102043199A (ja) |
| TW (1) | TW201129836A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8428403B2 (en) | 2010-07-27 | 2013-04-23 | Nitto Denko Corporation | Optical sensor module |
| US8452138B2 (en) | 2011-02-03 | 2013-05-28 | Nitto Denko Corporation | Optical sensor module |
| US8467640B2 (en) | 2010-08-31 | 2013-06-18 | Nitto Denko Corporation | Optical sensor module |
| US8548285B2 (en) | 2009-08-03 | 2013-10-01 | Nitto Denko Corporation | Manufacturing method of optical sensor module and optical sensor module obtained thereby |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011186036A (ja) * | 2010-03-05 | 2011-09-22 | Nitto Denko Corp | 光センサモジュールの製法およびそれによって得られた光センサモジュール |
| TWI465666B (zh) * | 2012-01-10 | 2014-12-21 | Ind Tech Res Inst | 模組化照明裝置與光源模組 |
| KR101220303B1 (ko) * | 2012-05-11 | 2013-01-16 | 주식회사 피피아이 | 광 파워 감시 모듈 |
| JP2014155098A (ja) * | 2013-02-12 | 2014-08-25 | Nitto Denko Corp | アンテナモジュールおよびその製造方法 |
| JP2014197364A (ja) * | 2013-03-07 | 2014-10-16 | 日東電工株式会社 | 情報表示システム |
| JP7325223B2 (ja) * | 2019-05-28 | 2023-08-14 | 理想科学工業株式会社 | 製品及びインクカートリッジ並びに製品の生産方法 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05196831A (ja) | 1992-01-22 | 1993-08-06 | Fujitsu Ltd | 自動調芯装置と自動調芯方法 |
| US5265184A (en) * | 1992-05-28 | 1993-11-23 | Motorola, Inc. | Molded waveguide and method for making same |
| US5428704A (en) * | 1993-07-19 | 1995-06-27 | Motorola, Inc. | Optoelectronic interface and method of making |
| TW255015B (ja) * | 1993-11-05 | 1995-08-21 | Motorola Inc | |
| US5835646A (en) * | 1995-09-19 | 1998-11-10 | Fujitsu Limited | Active optical circuit sheet or active optical circuit board, active optical connector and optical MCM, process for fabricating optical waveguide, and devices obtained thereby |
| WO1998029772A1 (en) * | 1996-12-31 | 1998-07-09 | Honeywell Inc. | Flexible optic connector assembly |
| US6456766B1 (en) * | 2000-02-01 | 2002-09-24 | Cornell Research Foundation Inc. | Optoelectronic packaging |
| US6766082B2 (en) * | 2000-10-18 | 2004-07-20 | Nippon Telegraph And Telephone Corporation | Waveguide-type optical device and manufacturing method therefor |
| KR100427356B1 (ko) * | 2001-08-14 | 2004-04-13 | 삼성전기주식회사 | 광마우스용 서브 칩 온 보드 |
| TWI294262B (en) * | 2002-06-28 | 2008-03-01 | Matsushita Electric Ind Co Ltd | A light reception/emission device built-in module with optical and electrical wiring combined therein and method of making the same |
| US7150569B2 (en) * | 2003-02-24 | 2006-12-19 | Nor Spark Plug Co., Ltd. | Optical device mounted substrate assembly |
| US7195941B2 (en) * | 2003-03-26 | 2007-03-27 | Intel Corporation | Optical devices and methods to construct the same |
| KR100575951B1 (ko) * | 2003-11-11 | 2006-05-02 | 삼성전자주식회사 | 광 인쇄회로기판 집적형 광연결 패키징 장치 |
| US7389012B2 (en) * | 2003-12-30 | 2008-06-17 | International Business Machines Corporation | Electro-optical module comprising flexible connection cable and method of making the same |
| JP4196839B2 (ja) * | 2004-01-16 | 2008-12-17 | 富士ゼロックス株式会社 | 高分子光導波路の製造方法 |
| US7146080B2 (en) * | 2004-03-11 | 2006-12-05 | Lambda Crossing, Ltd. | Method of connecting an optical element to a PLC |
| JP2006091241A (ja) * | 2004-09-22 | 2006-04-06 | Hitachi Cable Ltd | 光電気複合配線部品及びこれを用いた電子機器 |
| CN100458484C (zh) * | 2005-12-23 | 2009-02-04 | 国际商业机器公司 | 光电板及其制造方法 |
| US7391572B2 (en) * | 2006-03-01 | 2008-06-24 | International Business Machines Corporation | Hybrid optical/electronic structures fabricated by a common molding process |
| JP4876263B2 (ja) * | 2006-04-03 | 2012-02-15 | 国立大学法人 東京大学 | 信号伝送機器 |
| CN101382623A (zh) * | 2007-09-07 | 2009-03-11 | 中国科学院微电子研究所 | 带光纤定位槽的斜面接收光电探测器及其阵列的制作方法 |
| JP4892457B2 (ja) * | 2007-11-06 | 2012-03-07 | 日東電工株式会社 | 光導波路デバイスの製法およびそれによって得られる光導波路デバイス |
| JP5541764B2 (ja) | 2008-01-30 | 2014-07-09 | パロ・アルト・リサーチ・センター・インコーポレーテッド | 物体検出に応答して情報を取得する装置及び方法 |
| JP2011033876A (ja) * | 2009-08-03 | 2011-02-17 | Nitto Denko Corp | 光センサモジュールの製造方法およびそれによって得られた光センサモジュール |
| JP2011186036A (ja) * | 2010-03-05 | 2011-09-22 | Nitto Denko Corp | 光センサモジュールの製法およびそれによって得られた光センサモジュール |
| JP5325184B2 (ja) * | 2010-08-31 | 2013-10-23 | 日東電工株式会社 | 光センサモジュール |
| JP5693986B2 (ja) * | 2011-02-03 | 2015-04-01 | 日東電工株式会社 | 光センサモジュール |
-
2010
- 2010-02-16 JP JP2010030802A patent/JP2011102955A/ja active Pending
- 2010-08-19 TW TW099127757A patent/TW201129836A/zh unknown
- 2010-10-07 KR KR1020100097971A patent/KR20110040689A/ko not_active Withdrawn
- 2010-10-08 EP EP10186989A patent/EP2312358A2/en not_active Withdrawn
- 2010-10-08 CN CN2010105042943A patent/CN102043199A/zh active Pending
- 2010-10-08 US US12/900,964 patent/US20110085758A1/en not_active Abandoned
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8548285B2 (en) | 2009-08-03 | 2013-10-01 | Nitto Denko Corporation | Manufacturing method of optical sensor module and optical sensor module obtained thereby |
| US8428403B2 (en) | 2010-07-27 | 2013-04-23 | Nitto Denko Corporation | Optical sensor module |
| US8467640B2 (en) | 2010-08-31 | 2013-06-18 | Nitto Denko Corporation | Optical sensor module |
| US8452138B2 (en) | 2011-02-03 | 2013-05-28 | Nitto Denko Corporation | Optical sensor module |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110085758A1 (en) | 2011-04-14 |
| CN102043199A (zh) | 2011-05-04 |
| EP2312358A2 (en) | 2011-04-20 |
| KR20110040689A (ko) | 2011-04-20 |
| TW201129836A (en) | 2011-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5271141B2 (ja) | 光電気混載モジュールの製造方法およびそれによって得られた光電気混載モジュール | |
| JP2011102955A (ja) | 光センサモジュールの製造方法およびそれによって得られた光センサモジュール | |
| JP2011033876A (ja) | 光センサモジュールの製造方法およびそれによって得られた光センサモジュール | |
| JP2011186036A (ja) | 光センサモジュールの製法およびそれによって得られた光センサモジュール | |
| JP5106348B2 (ja) | 光電気混載モジュールの製造方法およびそれによって得られた光電気混載モジュール | |
| JP5693986B2 (ja) | 光センサモジュール | |
| JP5308408B2 (ja) | 光センサモジュール | |
| US8229256B2 (en) | Opto-electric hybrid module and method of manufacturing the same | |
| JP5325184B2 (ja) | 光センサモジュール | |
| JP2012208305A (ja) | 光電気混載基板およびその製法 | |
| JP2012189950A (ja) | 光電気混載基板およびその製法 | |
| JP5608122B2 (ja) | 光電気混載基板およびその製法 |