JP2011045989A - Cutting device - Google Patents
Cutting device Download PDFInfo
- Publication number
- JP2011045989A JP2011045989A JP2010166171A JP2010166171A JP2011045989A JP 2011045989 A JP2011045989 A JP 2011045989A JP 2010166171 A JP2010166171 A JP 2010166171A JP 2010166171 A JP2010166171 A JP 2010166171A JP 2011045989 A JP2011045989 A JP 2011045989A
- Authority
- JP
- Japan
- Prior art keywords
- cutting
- mounting table
- blade
- placement
- meshing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000005520 cutting process Methods 0.000 title claims abstract description 252
- 230000007246 mechanism Effects 0.000 claims abstract description 168
- 238000003825 pressing Methods 0.000 description 69
- 230000003287 optical effect Effects 0.000 description 45
- 238000001514 detection method Methods 0.000 description 40
- 238000000034 method Methods 0.000 description 26
- 230000008569 process Effects 0.000 description 20
- 238000010586 diagram Methods 0.000 description 13
- 238000012545 processing Methods 0.000 description 10
- 210000000887 face Anatomy 0.000 description 7
- 230000004048 modification Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 230000009467 reduction Effects 0.000 description 4
- 238000005452 bending Methods 0.000 description 2
- 210000001061 forehead Anatomy 0.000 description 2
- 230000003796 beauty Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000007730 finishing process Methods 0.000 description 1
- 238000005549 size reduction Methods 0.000 description 1
Images























Abstract
Description
本発明は、断裁装置に関し、特に、刃物を移動させて用紙束を断裁する断裁装置に関する。 The present invention relates to a cutting apparatus, and more particularly to a cutting apparatus that cuts a sheet bundle by moving a blade.
従来より、製本の仕上げ工程において、冊子の見栄えを良くすべく冊子の小口、天、地を切りそろえる断裁処理が行われている。このような断裁処理では、一般的に断裁テーブル上に冊子を固定し、刃物を冊子に向けて移動させて端縁を除去する。ここで、例えば一つの刃物で天、地、小口などを断裁するときに、用紙束を載置した回転テーブルを回転させて断裁位置を切り替える断裁装置が提案されている(例えば、特許文献1参照)。 Conventionally, in the bookbinding finishing process, a cutting process has been performed to align the booklet's forehead, top, and ground to improve the appearance of the booklet. In such a cutting process, a booklet is generally fixed on a cutting table, and the edge is removed by moving the blade toward the booklet. Here, for example, when a top, a ground, a small edge, or the like is cut with a single blade, a cutting device that rotates a rotary table on which a sheet bundle is placed and switches a cutting position has been proposed (see, for example, Patent Document 1). ).
上述の特許文献に記載される技術では、刃物およびその刃物を移動させるための機構を含む断裁ユニットを駆動源を用いて移動させている。しかしながら、このような断裁ユニットは一般的に重量が大きいため、このように断裁ユニットを移動させるための機構や駆動源も小型化および低コスト化することは難しい。 In the technique described in the above-mentioned patent document, a cutting unit including a blade and a mechanism for moving the blade is moved using a drive source. However, since such a cutting unit is generally heavy, it is difficult to reduce the size and cost of a mechanism and a drive source for moving the cutting unit.
そこで、本発明は上述した課題を解決するためになされたものであり、その目的は、簡易な構成で一つの刃物を用いて一つの用紙束の複数個所を断裁可能な断裁装置を提供することにある。 Accordingly, the present invention has been made to solve the above-described problems, and an object of the present invention is to provide a cutting device capable of cutting a plurality of portions of one sheet bundle using a single blade with a simple configuration. It is in.
上記課題を解決するために、本発明のある態様の断裁装置は、用紙束を断裁すべく移動可能に設けられた刃物と、用紙束が載置されるべき載置面を有する載置テーブルと、載置された用紙束が断裁されるべき断裁位置と、断裁位置よりも刃物の刃先が移動する刃先移動面から離間した退避位置と、の間で載置テーブルを移動させるテーブル移動手段と、断裁位置から退避位置に退避し再び断裁位置に進出する間に、載置テーブルに載置された用紙束の断裁すべき個所を切り替えるよう載置テーブルを回転させる回転機構と、を備える。 In order to solve the above-described problems, a cutting apparatus according to an aspect of the present invention includes a blade provided movably to cut a sheet bundle, and a placement table having a placement surface on which the sheet bundle is to be placed. A table moving means for moving the placement table between a cutting position at which the placed sheet bundle is to be cut, and a retreat position separated from the cutting edge moving surface where the cutting edge of the blade moves from the cutting position; A rotation mechanism that rotates the placement table so as to switch a portion of the sheet bundle placed on the placement table to be cut while the sheet is retracted from the cutting position to the retracted position and advanced again to the cutting position.
この態様によれば、刃物を含む断裁機構を移動させることなく用紙束を断裁することが可能となる。このため、簡易な構成で用紙の複数個所を断裁することが可能となる。 According to this aspect, it is possible to cut the sheet bundle without moving the cutting mechanism including the blade. For this reason, it is possible to cut a plurality of portions of the sheet with a simple configuration.
回転機構は、載置テーブルが移動する力を利用して載置テーブルを回転させてもよい。載置テーブルには、質量の大きい用紙束が載置されることも有り得る。このため、モータなどの駆動源を用いて載置テーブルを回転させる場合、この駆動源の小型化および低コスト化はは困難を伴う。この態様によれば、載置テーブルを回転させる駆動源を設ける必要がなくなるため、低コストな回転機構を実現することができる。 The rotation mechanism may rotate the mounting table using a force that moves the mounting table. A paper bundle having a large mass may be placed on the placement table. For this reason, when the mounting table is rotated using a drive source such as a motor, it is difficult to reduce the size and cost of the drive source. According to this aspect, since it is not necessary to provide a drive source for rotating the mounting table, a low-cost rotation mechanism can be realized.
回転機構は、載置テーブルと共に移動および回転するよう設けられた回転部材と、載置テーブルの移動中に回転部材に噛み合うことによって載置テーブルを回転させるよう配置された噛合部材と、を有してもよい。 The rotating mechanism has a rotating member provided to move and rotate together with the mounting table, and an engagement member arranged to rotate the mounting table by engaging with the rotating member during the movement of the mounting table. May be.
この態様によれば、例えばチェーンやラックギヤなどの噛合部材と、それに噛み合うスプロケットなどの回転部材を設ける、という簡易な構成により、載置テーブルが移動する力を利用して載置テーブルを回転させることができる。このため低コストな回転機構を実現することができる。 According to this aspect, for example, the mounting table is rotated using the force by which the mounting table moves, by providing a meshing member such as a chain or a rack gear and a rotating member such as a sprocket meshing with the meshing member. Can do. For this reason, a low-cost rotation mechanism can be realized.
断裁位置と退避位置との間で載置テーブルが移動しているときに回転部材と噛み合う噛合位置と、断裁位置と退避位置との間で載置テーブルが移動しても回転部材と噛み合わない非噛合位置と、の間で噛合部材を進退させる噛合切替機構をさらに備えてもよい。 When the mounting table moves between the cutting position and the retracted position, the meshing position engages with the rotating member, and even when the mounting table moves between the cutting position and the retracted position, the rotating table does not mesh with the rotating member. You may further provide the meshing switching mechanism which advances and retracts a meshing member between meshing positions.
この態様によれば、例えば断裁位置と退避位置との往復経路中において往路と復路の一方で回転部材と噛合部材とを噛み合わせ、他方で噛み合わせないようにすることによって、載置テーブルが逆回転することを回避することができる。このため、次の断裁個所を断裁すべく載置テーブルを適切に回転させることができる。 According to this aspect, for example, in the reciprocating path between the cutting position and the retracted position, the mounting table is reversed by meshing the rotating member and the meshing member on one of the forward path and the return path and not meshing on the other. Rotation can be avoided. For this reason, a mounting table can be rotated appropriately in order to cut the next cutting location.
回転する載置テーブルを所定の周方向位置でロックするロック機構をさらに備えてもよい。この態様によれば、載置テーブルの周方向位置のずれを抑制することができる。このため、画一的に用紙束を断裁することができる。 You may further provide the locking mechanism which locks the mounting table which rotates in a predetermined circumferential direction position. According to this aspect, the shift of the circumferential position of the mounting table can be suppressed. For this reason, it is possible to cut the sheet bundle uniformly.
回転部材は、噛合部材に噛み合って回転しているときにロック機構によって載置テーブルがロックされた場合、載置テーブルに対し空転するよう設けられてもよい。 The rotating member may be provided so as to idle with respect to the mounting table when the mounting table is locked by the lock mechanism when the rotating member meshes with the meshing member and rotates.
この態様によれば、ロック機構によって載置テーブルの回転がロックされたときに載置テーブルの移動も停止されることを回避することができる。このため、載置テーブルを次回の断裁のための周方向位置にロックさせるとともに載置テーブルを適切に移動させることができる。 According to this aspect, it is possible to prevent the movement of the mounting table from being stopped when the rotation of the mounting table is locked by the lock mechanism. For this reason, the mounting table can be locked at the circumferential position for the next cutting and the mounting table can be moved appropriately.
載置テーブルと回転部材とに介在するワンウェイクラッチをさらに備えてもよい。この態様によれば、例えば噛合部材を退避させなくても、断裁位置と退避位置との間で載置テーブルを往復させることによって、往路および復路の一方で載置テーブルを回転させ、他方で載置テーブルを回転させることを回避することができる。 You may further provide the one-way clutch interposed in a mounting table and a rotation member. According to this aspect, for example, even if the meshing member is not retracted, the mounting table is reciprocated between the cutting position and the retracting position, thereby rotating the mounting table on one of the forward path and the return path and mounting on the other. It is possible to avoid rotating the table.
本発明に係る断裁装置は、載置テーブルとともに回転する被検知部材と、被検知部材を検知することにより載置テーブルの回転方向の位置を検知するセンサと、さらに備えてもよい。 The cutting device according to the present invention may further include a detected member that rotates together with the mounting table, and a sensor that detects a position in the rotation direction of the mounting table by detecting the detected member.
例えば断裁位置と退避位置との間で、電源がオフにされるなど何かしらの原因で載置テーブルの回転方向の位置を装置が把握することが困難となる事態が生じ得る。このため、このような事態が生じたときに載置テーブルの回転方向の位置を検知するセンサを設ける対策が考えられる。このとき、例えば断裁位置と退避位置との間で移動する載置テーブルにセンサを設けると、センサに接続されるケーブルを載置テーブルの移動を考慮した長さとし、且つケーブルが移動するスペースも確保する必要が生じ、これらは装置の小型化または低コスト化を阻害する要因となる。この態様によれば、載置テーブルへのセンサの搭載を回避できるため、センサを載置テーブルとともに移動させることを回避することができる。このため、センサのケーブルの長さや引き回しスペースを抑制することができ、装置の小型化や低コスト化を簡易な構成で実現することができる。 For example, it may be difficult for the apparatus to grasp the position of the mounting table in the rotation direction between the cutting position and the retracted position due to some reason such as turning off the power. For this reason, a countermeasure for providing a sensor for detecting the position of the mounting table in the rotation direction when such a situation occurs can be considered. At this time, for example, if a sensor is provided on the mounting table that moves between the cutting position and the retracted position, the cable connected to the sensor has a length that takes into account the movement of the mounting table, and a space for moving the cable is also secured. This becomes a factor that hinders downsizing or cost reduction of the apparatus. According to this aspect, since mounting of the sensor on the mounting table can be avoided, it is possible to avoid moving the sensor together with the mounting table. For this reason, the length of the sensor cable and the routing space can be suppressed, and downsizing and cost reduction of the apparatus can be realized with a simple configuration.
被検知部材は、載置テーブルの回転中心に対し径外向きに突出する突出部を有し、センサは、突出部を検知することにより、載置テーブルの回転方向の位置を検知してもよい。 The member to be detected may have a protrusion that protrudes radially outward with respect to the rotation center of the mounting table, and the sensor may detect the position of the mounting table in the rotation direction by detecting the protrusion. .
この態様によれば、例えばこの突出部を非接触のセンサなどによって検知することにより、載置テーブルの回転方向の位置を容易に把握することができる。このため、装置のさらなる低コスト化を実現することができる。 According to this aspect, for example, the position of the mounting table in the rotation direction can be easily grasped by detecting the protruding portion with a non-contact sensor or the like. For this reason, the further cost reduction of an apparatus is realizable.
被検知部材は、載置テーブルの回転中心に対し径内向きに凹む凹部を有し、センサは、載置テーブルとともに移動しながら凹部を検知することにより、載置テーブルの回転方向の位置を検知してもよい。 The detected member has a recess that is recessed radially inward with respect to the center of rotation of the mounting table, and the sensor detects the position of the mounting table in the rotation direction by detecting the recess while moving together with the mounting table. May be.
この態様によれば、例えば載置テーブルの移動範囲の一部だけセンサを移動させることによっても載置テーブルの回転方向の位置を検知することができる。このため、例えばセンサのスペースやセンサが受光する光の経路など検知に必要なスペースを抑制することができ、装置のさらなる省スペース化を実現することができる。 According to this aspect, for example, the position of the mounting table in the rotation direction can also be detected by moving the sensor by a part of the moving range of the mounting table. For this reason, for example, the space required for detection, such as the sensor space and the path of light received by the sensor, can be suppressed, and further space saving of the device can be realized.
本発明によれば、簡易な構成で一つの刃物を用いて一つの用紙束の複数個所を断裁可能な断裁装置を提供することができる。 According to the present invention, it is possible to provide a cutting apparatus capable of cutting a plurality of portions of one sheet bundle using a single blade with a simple configuration.
以下、図面を参照して本発明の実施の形態(以下、実施形態という)について詳細に説明する。 Hereinafter, embodiments of the present invention (hereinafter referred to as embodiments) will be described in detail with reference to the drawings.
(第1の実施形態)
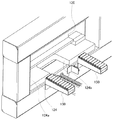
図1は、第1の実施形態に係る断裁装置10の構成を示す斜視図である。断裁装置10は、フレーム12、断裁機構14、テーブルユニット16、テーブル移動機構18、および用紙押さえ機構20を有する。
(First embodiment)
FIG. 1 is a perspective view showing a configuration of a cutting
図2は、第1の実施形態に係る断裁装置10を図1の視点Pから見た正面図である。断裁機構14は、刃物ユニット22、右上ガイドユニット24、左上ガイドユニット26、下ガイドユニット28、右上水平レール30、左上水平レール32、および下水平レール34を有する。
FIG. 2 is a front view of the cutting
刃物ユニット22は、刃物40、中央プレート42、上プレート44、下プレート46、右垂直レール48、および左垂直レール50を有する。刃物ユニット22は、水平方向および垂直方向に移動可能に設けられており、これにより刃物40は、用紙束を断裁すべく移動可能に設けられる。
The
刃物40は平板状に設けられ、刃先が下方を向くように配置される。第1の実施形態では、刃物40は、刃先が右に行くほど下がるよう設けられる。刃物40の上方は、中央プレート42の下方に固定される。中央プレート42の上方且つ同一面上に上プレート44が配置され、中央プレート42の下方且つ同一面上に下プレート46が配置される。中央プレート42、上プレート44、および下プレート46は、垂直に延在する右垂直レール48によってそれぞれ裏面右側が互いに連結され、垂直に延在する左垂直レール50によってそれぞれ裏面左側が互いに連結されている。
The
右上ガイドユニット24は、垂直ガイド52、水平ガイド54、およびブロック56を有する。垂直ガイド52は、右垂直レール48が摺動可能に嵌合するよう垂直方向に延びる凹部を有する。右上水平レール30は、水平方向に延在するようフレーム12の前面右上方に固定されている。水平ガイド54は、この右上水平レール30が摺動可能に嵌合するよう水平方向に延びる凹部を有する。垂直ガイド52と水平ガイド54とは互いにブロック56によって結合されている。
The upper
左上ガイドユニット26は、垂直ガイド58、水平ガイド60、およびブロック62を有する。垂直ガイド58は、左垂直レール50が摺動可能に嵌合するよう垂直方向に延びる凹部を有する。左上水平レール32は、水平方向に延在するようフレーム12の前面左上方に固定されている。水平ガイド60は、この左上水平レール32が摺動可能に嵌合するよう水平方向に延びる凹部を有する。垂直ガイド58と水平ガイド60とは互いにブロック62によって結合されている。また、中央プレート42と下プレート46とは、連結部材47によって互いに結合されている。
The upper
下ガイドユニット28は、垂直ガイド64、垂直ガイド66、水平ガイド68、およびブロック70を有する。垂直ガイド64は、右垂直レール48が摺動可能に嵌合するよう垂直方向に延びる凹部を有する。垂直ガイド66は、左垂直レール50が摺動可能に嵌合するよう垂直方向に延びる凹部を有する。下水平レール34は、水平方向に延在するようフレーム12の前面下方に固定されている。水平ガイド68は、この下水平レール34が摺動可能に嵌合するよう水平方向に延びる凹部を有する。垂直ガイド64および垂直ガイド66と水平ガイド68とは、互いにブロック70によって結合されている。
The
こうして刃物ユニット22は、垂直ガイド52および垂直ガイド64に右垂直レール48が摺動可能に嵌合し、水平ガイド54および垂直ガイド66が左垂直レール50に摺動可能に嵌合することにより、垂直方向に移動可能に設けられる。以下、刃物40を垂直に移動させるためのこれら垂直ガイド52、垂直ガイド58、垂直ガイド64、垂直ガイド66、右垂直レール48、および左垂直レール50を垂直リニアガイド機構80とする。
In this way, the
また、刃物ユニット22は、水平ガイド54、水平ガイド60、および水平ガイド68がそれぞれ右上水平レール30、左上水平レール32、および下水平レール34に摺動可能に嵌合することにより、右上ガイドユニット24、左上ガイドユニット26、および下ガイドユニット28と共に水平方向に移動可能に設けられる。以下、刃物40を水平方向に移動可能とするためのこれら水平ガイド54、水平ガイド60、水平ガイド68、右上水平レール30、左上水平レール32、および下水平レール34を水平リニアガイド機構82とする。
In addition, the
下プレート46の右端部周辺には、第1油圧シリンダ86の一端が連結される。第1油圧シリンダ86の他端は、フレーム12に連結される。このため、第1油圧シリンダ86を伸縮させることにより、刃物ユニット22を垂直方向に移動させることができる。以下、垂直リニアガイド機構80および第1油圧シリンダ86を、刃物40を垂直方向に駆動する垂直駆動機構90とする。
One end of a first
下プレート46の裏面略中央には、第2油圧シリンダ88の一端が連結される。第2油圧シリンダ88の他端は、フレーム12に連結される。このため、第2油圧シリンダ88を伸縮させることにより、刃物ユニット22を水平方向に移動させることができる。以下、水平リニアガイド機構82および第2油圧シリンダ88を、刃物40を水平方向に駆動する水平駆動機構92とする。
One end of a second
ブロック62には、フック103が取り付けられている。また、下プレート46の左端部には、フック104が取り付けられている。このフック103およびフック104の各々に、コイルスプリング102の両端部のそれぞれが係止される。このようにコイルスプリング102が設けられることにより、刃物ユニット22に対し上方に持ち上げる力を与え、第1油圧シリンダ86が刃物ユニット22を上方に駆動するときの駆動力をアシストしている。
A
断裁装置10は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAMなどを有する電子制御部(図示せず)を内部に有している。電子制御部は、第1油圧シリンダ86および第2油圧シリンダ88の各々の作動を制御することにより、垂直駆動機構90および水平駆動機構92の各々の作動を制御する。第1の実施形態では、電子制御部は、垂直駆動機構90および水平駆動機構92の双方で刃物40を駆動して刃物40に用紙束を断裁させる。刃物40の詳細な駆動方法については後述する。
The cutting
フレーム12の右上部分は、右位置センサ120が固定されている。また、フレーム12の左上部分には、左位置センサ122が固定されている。右位置センサ120は、右上ガイドユニット24を検知することにより、刃物40が許容される最右位置に到達したことを検知する。左位置センサ122は、左上ガイドユニット26を検知することにより、刃物40が許容される最左位置に到達したことを検知する。
The
また、フレーム12の上方には、上位置センサ116および下位置センサ118が固定されている。上位置センサ116は下位置センサ118よりも上方に配置されている。上位置センサ116は、上プレート44の上端を検知することにより、刃物40が許容される最上位置に到達したことを検知する。下位置センサ118は、上プレート44の上端を検知することにより、刃物40が許容される最下位置に到達したことを検知する。
An
フレーム12の下方中央には、断裁テーブル124が水平に広がるよう配置される。断裁テーブル124の上面には、用紙束が載置されるべき載置面124aが設けられる。
A cutting table 124 is disposed in the lower center of the
中央プレート42の裏面右側には、垂直に延在するガイドバー98が固定されている。このガイドバー98の裏面と接するよう、ガイドブロック94が断裁テーブル124の右側に固定されている。また、中央プレート42の裏面左側には、垂直に延在するガイドバー100が固定されている。このガイドバー100の裏面と接するよう、ガイドブロック96が断裁テーブル124の左側に固定されている。刃物40が上下左右に移動するとき、ガイドバー98およびガイドバー100の各々は、それぞれガイドブロック94およびガイドブロック96と摺動し、刃物40の前後方向の動きを規制する。
A vertically extending
図3は、第1の実施形態に係る断裁装置10を図1の視点Qから見た裏面図である。用紙押さえ機構20は、押さえ部材130、中継部材132、連結部材134、第3油圧シリンダ136、およびリニアガイド140を有する。押さえ部材130は、平板をL字状に折り曲げた形状に形成される。押さえ部材130は、一方の外面が下方に向くように配置される。この下方に向く外面が、用紙束を断裁テーブル124の載置面124aに押し付ける押圧面130aとなる。
FIG. 3 is a rear view of the cutting
第3油圧シリンダ136はフレーム12の上方部分に固定される。中継部材132および連結部材134は、押さえ部材130と第3油圧シリンダ136とを連結する。リニアガイド140は、垂直方向に移動するよう押さえ部材130を案内する。具体的には、リニアガイド140は、レール142およびガイド144を有する。レール142は、押さえ部材130および中継部材132の双方に垂直方向に延在するよう固定される。レール142は、押さえ部材130に対向するフレーム12に固定されている。ガイド144は、レール142が摺動可能に嵌合する凹部が設けられている。レール142がガイド144に嵌合することにより、リニアガイド140は押さえ部材130を垂直方向に移動するよう案内する。
The third
以上より、第3油圧シリンダ136が伸縮することにより、押さえ部材130が垂直方向に駆動される。具体的には、第3油圧シリンダ136が伸長することにより、押さえ部材130が下降し、断裁テーブル124の載置面124aに載置された用紙束を下方に押し付ける。第3油圧シリンダ136が収縮することにより、押さえ部材130が上昇し、この用紙束への押し付け力が解除される。
As described above, when the third
図4は、第1の実施形態に係る断裁装置10を図1の視点Rから見た左側面図である。テーブルユニット16は、載置テーブル170、支持ブラケット172、固定機構174、および回転機構176を有する。載置テーブル170は、用紙束が載置される載置面170aを有する。載置テーブル170は、載置面170aに垂直な軸を中心に回転可能に支持ブラケット172に支持される。
4 is a left side view of the cutting
固定機構174は、載置テーブル170に載置された用紙束のいずれかの端縁周辺を載置テーブル170に固定する固定手段として機能する。固定機構174は、載置テーブル170の一端縁周辺の上面に設けられる。固定機構174は、クランパ180、ロッド182、エアシリンダ184、および位置決めピン186を有する。位置決めピン186は載置テーブル170の一端縁周辺の上面に、その一端縁に平行に2つ並設される。位置決めピン186は、載置テーブル170に載置される用紙束の一方向の位置を規制する位置決め部材として機能する。載置テーブル170に冊子が載置される場合、位置決めピン186には冊子の背が突き当てられて位置決めされる。
The
エアシリンダ184は、位置決めピン186と載置テーブル170の一端縁との間に配置される。ロッド182は、エアシリンダ184から垂直に上方に延在する。エアシリンダ184は、ロッド182を軸方向、すなわち垂直方向に移動させる。クランパ180は断面がL字状に形成され、一方の内面がロッド182の上端に固定されている。以上より、エアシリンダ184が収縮することにより、ロッド182と共にクランパ180が下降し、載置テーブル170に載置された用紙束を下方に押し付けて固定する。したがって、載置テーブル170に冊子が載置された場合、固定機構174は冊子の背周辺を固定する。
The
テーブル移動機構18は、フレーム200、ボールネジ202、およびモータ204を有する。フレーム200は、断裁装置10の前後方向(以下、単に「前後方向」という)に延在して設けられる。フレーム200には前後方向に延在するガイド(図示せず)が設けられており、テーブルユニット16の支持ブラケット172は、このガイドに摺動可能に支持されている。フレーム200は、こうして載置テーブル170の載置面170aが水平となり且つ前後方向に摺動できるようテーブルユニット16全体を支持する。
The
ボールネジ202は、前後方向に延在するよう配置され、回転可能にフレーム200に支持される。支持ブラケット172は、ボールネジ202と噛み合う雌ネジ部(図示せず)が設けられており、ボールネジ202が回転することによりテーブルユニット16全体が前後方向に移動することが可能となっている。フレーム200の後部にはモータ204が固定されている。モータ204は、ボールネジ202を駆動するよう、ボールネジ202の一端に接続されている。電子制御部は、モータ204の作動を制御することにより、テーブルユニット16の前後方向への移動を制御する。
The
回転機構176は、載置テーブル170を載置面170aと垂直な軸を中心に回転させる。載置テーブル170の具体的な構成については後述する。回転機構176は、1つの用紙束を複数回にわたって複数個所を断裁するときの各々の断裁タイミングの間に、断裁すべき個所を切り替えるべく載置テーブル170を回転させて周方向位置を切り替える。電子制御部および回転機構176は、載置テーブル170に冊子が載置された場合、天地の一方、小口、天地の他方の順に刃物40で断裁して切りそろえるよう、載置テーブル170の周方向位置を順次切り替える。
The
図5(a)は、天地の一方を断裁するときの冊子2、固定機構174、および刃先移動面L1との関係を示す図である。刃物40は、用紙束を断裁すべく移動可能に設けられる。このときの刃物40の刃先の移動経路を刃先移動面L1とする。冊子2は、刃物40によってこの刃先移動面L1に沿って断裁される。
Fig.5 (a) is a figure which shows the relationship between the
この例では、固定機構174が右に位置するよう載置テーブル170の周方向位置が保持されているときに、固定機構174に固定されている背2aに接する隣接端縁である天2cが前方、他の隣接端縁である地2dが後方に位置するよう冊子2が載置テーブル170に固定されているものとする。このとき、背2aの背向端縁である小口2bは左側に位置する。なお、天2cと地2dの向きが逆でもよい。
In this example, when the circumferential direction position of the mounting table 170 is held so that the
電子制御部は、載置テーブル170に載置された冊子を最初に断裁する場合、固定機構174が冊子の右側に位置するよう回転機構176を用いて載置テーブル170を回転させる。このため、天2cが刃先移動面L1を越え、天2cが最初の断裁対象となる。
When the booklet placed on the placement table 170 is first cut, the electronic control unit rotates the placement table 170 using the
図5(b)は、天地の一方を断裁すべく刃物40が初期位置にあるときの断裁機構14を示す図である。電子制御部は、天2cまたは地2dを断裁して除去する場合、背2aから小口2bに向かう方向に刃物40を移動させて用紙束を断裁するよう、垂直駆動機構90および水平駆動機構92の各々の作動を制御する。このため、電子制御部は、冊子2を断裁する前、すなわち刃物40が冊子2よりも上方にあるときに、中央位置より背2a側の右の初期位置で刃物40を保持する。第1の実施形態では、刃物40が最上位置且つ最右位置にあるときがこの初期位置となる。
FIG.5 (b) is a figure which shows the
図5(c)は、天地の一方を断裁すべく刃物40が下降位置に下降したときの断裁機構14を示す図である。電子制御部は、背2aから小口2bに向かう方向、すなわち右から左に移動させながら刃物40を下降させるよう、垂直駆動機構90および水平駆動機構92の作動を制御する。第1の実施形態では、最下位置且つ最左位置に向けて直線的に刃物40を移動させる。このように背2aから小口2bに向けて移動させながら刃物40を下降させることにより、断裁後の冊子2の美観低下を抑制することができる。
FIG.5 (c) is a figure which shows the
図6(a)は、小口を断裁するときの冊子2、固定機構174、および刃先移動面L1との関係を示す図である。電子制御部は、載置テーブル170に載置された冊子を次に断裁する場合、固定機構174が冊子の後方に位置するよう回転機構176を用いて載置テーブル170を回転させる。このため、小口2bが刃先移動面L1を越え、小口2bが次の断裁対象となる。
FIG. 6A is a diagram illustrating a relationship between the
図6(b)は、小口を断裁すべく刃物40が初期位置にあるときの断裁機構14を示す図である。第1の実施形態では、小口2bを断裁する場合、刃物40を右から左に移動させながら下降させる。このため、電子制御部は、天2cの断裁前と同様に、小口2bを断裁する前に、冊子2よりも上方且つ中央位置より右の初期位置で刃物40を保持する。第1の実施形態では、刃物40が最上位置且つ最右位置にあるときがこの初期位置となる。
FIG. 6B is a view showing the
この初期位置に刃物40を保持するため、電子制御部は、天2cの断裁工程の終了後、小口2bの断裁工程で移動を開始すべき初期位置まで刃物40を移動させるよう、垂直駆動機構90および水平駆動機構92の各々の作動を制御する。このとき電子制御部は、図5(c)に示す位置から図6(b)に示す位置まで直線的に刃物40を移動させる。
In order to hold the
図6(c)は、小口を断裁すべく刃物40が下降位置に下降したときの断裁機構14を示す図である。電子制御部は、刃物40を右から左に移動させながら下降させるよう、垂直駆動機構90および水平駆動機構92の作動を制御する。このように小口2bを断裁する場合にも刃物40を斜めに移動させることにより、断裁後の冊子2の美観低下を抑制することができる。第1の実施形態では、最下位置且つ最左位置に向けて直線的に刃物40を移動させる。
FIG.6 (c) is a figure which shows the
なお、電子制御部は、刃物40を左から右に移動させながら下降させるよう垂直駆動機構90および水平駆動機構92の作動を制御してもよい。この場合、電子制御部は、小口2bを断裁する前に、冊子2よりも上方且つ中央位置より左の初期位置で刃物40を保持する。第1の実施形態では、刃物40が最上位置且つ最左位置にあるときがこの初期位置となる。
The electronic control unit may control the operations of the
図7(a)は、天地の他方を断裁するときの冊子2、固定機構174、および刃先移動面L1との関係を示す図である。電子制御部は、載置テーブル170に載置された冊子を次に断裁する場合、固定機構174が冊子の左側に位置するよう回転機構176を用いて載置テーブル170を回転させる。このため、地2dが刃先移動面L1を越え、地2dが次の断裁対象となる。
Fig.7 (a) is a figure which shows the relationship between the
図7(b)は、天地の他方を断裁すべく刃物40が初期位置にあるときの断裁機構14を示す図である。電子制御部は、背2aから小口2bに向かう方向に刃物40を移動させて用紙束を断裁するために、冊子2を断裁する前、すなわち刃物40が冊子2よりも上方にあるときに、中央位置より背2a側の左の初期位置で刃物40を保持する。
FIG. 7B is a diagram showing the
この初期位置に刃物40を保持するため、電子制御部は、小口2bの断裁工程の終了後、地2dの断裁工程で移動を開始すべき初期位置まで刃物40を移動させるよう、垂直駆動機構90および水平駆動機構92の各々の作動を制御する。このとき電子制御部は、図6(c)に示す位置から図7(b)に示す位置まで直線的に刃物40を移動させる。
In order to hold the
このように電子制御部は、用紙束を断裁する第1の工程の次に第1の工程とは異なる方向に刃物40を移動させて用紙束を断裁する第2の工程に進む場合、第1の工程の終了後、第2の工程で移動を開始すべき初期位置まで刃物40を移動させて待機させるよう、垂直駆動機構90および水平駆動機構92の各々の作動を制御する。これにより、用紙束を断裁する次の工程に速やかに以降することが可能となる。
As described above, when the electronic control unit proceeds to the second step of cutting the sheet bundle by moving the
図7(c)は、天地の他方を断裁すべく刃物40が下降位置に下降したときの断裁機構14を示す図である。電子制御部は、背2aから小口2bに向かう方向、すなわちこの場合は刃物40を左から右に移動させながら下降させるよう、垂直駆動機構90および水平駆動機構92の作動を制御する。第1の実施形態では、最下位置且つ最右位置に向けて直線的に刃物40を移動させる。
FIG.7 (c) is a figure which shows the
このように電子制御部は、天地の一方を断裁すべき第1の周方向位置に載置テーブル170が保持されているとき、第1の周方向位置から180°回転した周方向位置、すなわち天地の他方を断裁すべき第2の周方向位置に載置テーブル170が保持されているときとは、用紙束の紙面と平行な移動方向が逆方向となる方向に刃物40を移動させて用紙束を断裁するよう、垂直駆動機構90および水平駆動機構92の各々の作動を制御する。載置テーブル170が回転して冊子2の位置を切り替えて、冊子2の天地を断裁する場合、背2aから小口2bに向く方向は天2cを断裁するときと地2dを断裁するときとで異なることになる。これにより、天2cまたは地2dを断裁するときに、刃物40を背2aから小口2bに向けて適切に移動させながら断裁することができる。
As described above, when the mounting table 170 is held at the first circumferential position where one of the top and bottom is to be cut, the electronic control unit rotates the
また、このように電子制御部は、第1の周方向位置に載置テーブル170が保持されているとき、第2の周方向位置に載置テーブル170が保持されているときとは異なる方向に刃物40を移動させて用紙束を断裁するよう、垂直駆動機構90および水平駆動機構92の各々の作動を制御する。これにより、断裁後の冊子2の美観低下を適切に抑制することができる。
Further, in this way, the electronic control unit has a direction different from that when the mounting table 170 is held at the second circumferential position when the mounting table 170 is held at the first circumferential position. The operation of each of the
図8は、テーブルユニット16を図4の視点Sから見た図である。回転機構176は、載置テーブル170が断裁位置と退避位置との間で移動するときの中途部に設けられる。回転機構176は、スプロケット220、チェーン222、および噛合切替機構224を有する。スプロケット220は、載置テーブル170と共に移動および回転するよう載置テーブル170に連結されている。したがってスプロケット220は、載置テーブル170と共に回転する回転部材として機能する。チェーン222は、スプロケット220と噛み合う噛合部材として機能する。チェーン222は、載置テーブル170の移動中にスプロケット220に噛み合うことによって載置テーブル170を回転させるよう配置される。
FIG. 8 is a view of the
テーブル移動機構18は、載置された用紙束が断裁されるべき断裁位置と、断裁位置よりも刃先移動面L1から離間した退避位置と、の間で載置テーブル170を移動させる。噛合切替機構224は、断裁位置と退避位置との間で載置テーブル170が移動しているときにスプロケット220と噛み合う噛合位置と、断裁位置と退避位置との間で載置テーブル170が移動してもスプロケット220と噛み合わない非噛合位置と、の間でチェーン222を進退させる。
The
具体的には、噛合切替機構224は、エアシリンダ226、ロッド228、スライダ230、およびレール232を有する。スライダ230は、ロッド228の両端にそれぞれ固定される。この一対のスライダ230は互いに平行となるよう、ロッド228に垂直に固定される。
Specifically, the
レール232は、この一対のスライダ230の各々と摺動可能に嵌合するよう一対設けられる。一対のレール232は、テーブル移動機構18のフレーム200に固定される。このときレール232は、テーブルユニット16の移動方向と垂直にスライダ230を摺動させるため、テーブルユニット16の移動方向に対し垂直となるようフレーム200に取り付けられる。
A pair of
一対のスライダ230の各々の先端には、チェーン222の端部が固定される。ロッド228はエアシリンダ226に連結される。以上より、スプロケット220が噛合切替機構224の近傍を通過するときにエアシリンダ226を伸長させることにより、チェーン222をスプロケット220に噛み合わせて載置テーブル170を回転させることができる。
The end of the
このように回転機構176は、載置テーブル170が移動する力を利用して載置テーブル170を回転させる。載置テーブル170には重い冊子なども載置されることもあるため、載置テーブル170を回転させるための駆動源を別途設ける場合は、この駆動源の小型化は困難を伴う。第1の実施形態に係る回転機構176によれば、載置テーブル170を回転させるための駆動源を別途設ける場合に比べてコストを抑制することができる。
As described above, the
なお、テーブル移動機構18は、断裁位置センサ240および退避位置センサ242を有する。断裁位置センサ240は、テーブルユニット16の支持ブラケット172が断裁位置センサ240に当接したときに、載置された用紙束が断裁されるべき断裁位置に載置テーブル170が進出したことを検出する。退避位置センサ242は、支持ブラケット172が退避位置センサ242に当接したときに、断裁位置よりも刃先移動面L1から離間した退避位置に載置テーブル170が退避したことを検出する。断裁位置センサ240および退避位置センサ242の検出結果は、電子制御部に入力される。
The
図9は、図4のテーブルユニット16周辺の拡大図である。回転機構176は、ロック機構250をさらに有する。ロック機構250は、位置決めロータ252、位置決めピン254、およびエアシリンダ256を有する。
FIG. 9 is an enlarged view around the
位置決めロータ252は円盤状に形成され、スプロケット220と同軸となるようスプロケット220に固定される。位置決めロータ252の外周には、周方向の間隔が互いに90°の角度となるよう設けられた3つの切り欠き部252aが設けられている。位置決めピン254は、一端が位置決めロータ252の外周に対向し、他端がエアシリンダ256に連結されている。エアシリンダ256は、支持ブラケット172に固定される。
The
したがって、エアシリンダ256を伸長させたときは、位置決めピン254が位置決めロータ252の外周に向けて進出する。位置決めロータ252は、位置決めピン254が切り欠き部252aに嵌合した位置でロックされる。こうしてロック機構250は、回転する載置テーブル170を所定の周方向位置でロックする。
Therefore, when the
第1の実施形態では、図5(a)、図6(a)、および図7(a)の各々に示す周方向位置で載置テーブル170の回転をロックさせる位置に、切り欠き部252aが設けられている。こうして回転機構176は、断裁位置から退避位置に退避し再び断裁位置に進出する間に、載置テーブル170に載置された用紙束の断裁すべき個所を切り替えるよう載置テーブル170を回転させる。なお、ロック機構250がロックする載置テーブル170の周方向位置がこれらに限定されないことは勿論である。
In the first embodiment, the
電子制御部は、嵌合させるべき切り欠き部252aが位置決めピン254に対向するタイミングで位置決めピン254を進出させると共に、チェーン222をスプロケット220から退避させる。しかし、位置決めピン254の進出タイミングよりもチェーン222の退避タイミングが遅れた場合を考慮して、スプロケット220は、トルクリミッタ(図示せず)を介して載置テーブル170と連結されている。このためスプロケット220は、チェーン222に噛み合って回転しているときにロック機構250によって載置テーブル170がロックされた場合、載置テーブル170に対し空転するよう設けられる。これにより、位置決めピン254が位置決めロータ252に嵌合したときにテーブルユニット16の移動が停止する事態を回避することができる。
The electronic control unit advances the
また、載置テーブル170は、付勢支持機構270を介して支持ブラケット172に支持されている。付勢支持機構270は、フランジ272、ピストン274、シリンダ276、フランジ278、およびコイルスプリング280を有する。フランジ272は円盤状に形成され、載置テーブル170の回転軸と同軸となるよう載置テーブル170の下面に固定される。ピストン274は、フランジ272よりも径の小さい円柱状に形成され、フランジ272と同軸となるよう一端がフランジ272の下面に固定される。
Further, the mounting table 170 is supported by the
シリンダ276は、ピストン274の外径と略同一の内径を有する有底の円筒状に設けられる。フランジ278は、シリンダ276の上端から径外向きに突出するよう設けられる。付勢手段であるコイルスプリング280は、フランジ272とフランジ278との間に配置され、互いに離間させる方向に両者に付勢力を与える。これによって、載置テーブル170は持ち上げられた状態でテーブル移動機構18によって断裁位置と退避位置との間を移動する。
The
図10(a)は、天地の一方を断裁すべく退避位置P2から断裁位置P1に進出するときの載置テーブル170の動作を示す図である。以下、図10(a)、図10(b)、図11(a)、図11(b)、図12(a)、図12(b)は、載置テーブル170を下方から見た状態を示している。図10(a)の左側に示すように、冊子2を押し付ける押し付け部材であるクランパ180が装置右側に位置しているときの載置テーブル170の周方向位置が、断裁前の初期位置となる。これを、「第1の周方向位置」とする。載置テーブル170は、退避位置P2にあるとき、この第1の周方向位置で断裁対象となる冊子2が載置面170aに載置され、クランパ180によって固定される。
FIG. 10A is a diagram showing the operation of the mounting table 170 when moving from the retracted position P2 to the cutting position P1 to cut one of the top and bottom. Hereinafter, FIG. 10A, FIG. 10B, FIG. 11A, FIG. 11B, FIG. 12A, and FIG. 12B show the mounting table 170 viewed from below. Show. As shown on the left side of FIG. 10A, the circumferential position of the mounting table 170 when the
載置テーブル170に載置された冊子2がクランパ180によって固定されると、電子制御部は、テーブル移動機構18によって載置テーブル170を退避位置P2から断裁位置P1に移動させる。このとき電子制御部は、チェーン222を非噛合位置に保持し、噛合位置に進出させない。このため載置テーブル170は、第1の周方向位置のまま断裁位置P1に進出する。
When the
図10(b)は、天地の一方を断裁後、断裁位置P1から退避位置P2に退避するときの載置テーブル170の動作を示す図である。天2cの断裁が完了すると、電子制御部は、載置テーブル170を断裁位置P1から退避位置P2に退避させる。このときも電子制御部は、チェーン222を非噛合位置に保持し、噛合位置に進出させない。このため載置テーブル170は、第1の周方向位置のまま退避位置P2に退避する。
FIG. 10B is a diagram illustrating the operation of the mounting table 170 when the top and bottom sides are cut and then retracted from the cutting position P1 to the retracted position P2. When the cutting of the top 2c is completed, the electronic control unit retracts the placement table 170 from the cutting position P1 to the retracted position P2. Also at this time, the electronic control unit holds the
図11(a)は、小口を断裁すべく退避位置P2から断裁位置P1に進出するときの載置テーブル170の動作を示す図である。載置テーブル170が退避位置P2に移動すると、電子制御部は、載置テーブル170を再び断裁位置P1に向けて移動させる。このとき電子制御部は、載置テーブル170を90°回転させるようチェーン222を噛合位置に進出させ、再び非噛合位置に退避させる。このように第1の周方向位置から90°回転した位置を「第2の周方向位置」とする。載置テーブル170は、この第2の周方向位置で断裁位置P1に進出する。これにより、小口2bが刃先移動面L1に達する。
FIG. 11A is a diagram illustrating the operation of the mounting table 170 when moving from the retracted position P2 to the cutting position P1 to cut the fore edge. When the mounting table 170 moves to the retracted position P2, the electronic control unit moves the mounting table 170 again toward the cutting position P1. At this time, the electronic control unit advances the
図11(b)は、小口を断裁後、断裁位置P1から退避位置P2に退避するときの載置テーブル170の動作を示す図である。小口2bの断裁が完了すると、電子制御部は、載置テーブル170を断裁位置P1から退避位置P2に再び退避させる。このとき電子制御部は、チェーン222を非噛合位置に保持し、噛合位置に進出させない。このため載置テーブル170は、第2の周方向位置のまま退避位置P2に退避する。
FIG. 11B shows the operation of the mounting table 170 when the fore edge is cut and then retracted from the cutting position P1 to the retracted position P2. When the cutting of the
図12(a)は、天地の他方を断裁すべく退避位置P2から断裁位置P1に進出するときの載置テーブル170の動作を示す図である。載置テーブル170が退避位置P2に移動すると、電子制御部は、載置テーブル170を再び断裁位置P1に向けて移動させる。このとき電子制御部は、載置テーブル170を再び90°回転させるようチェーン222を噛合位置に進出させ、再び非噛合位置に退避させる。このように第2の周方向位置から90°回転した位置を「第3の周方向位置」とする。載置テーブル170は、この第3の周方向位置で断裁位置P1に進出する。これにより、地2dが刃先移動面L1に達する。
FIG. 12A is a diagram illustrating the operation of the mounting table 170 when moving from the retracted position P2 to the cutting position P1 to cut the other of the top and bottom. When the mounting table 170 moves to the retracted position P2, the electronic control unit moves the mounting table 170 again toward the cutting position P1. At this time, the electronic control unit advances the
図12(b)は、天地の他方を断裁後、断裁位置P1から退避位置P2に退避するときの載置テーブル170の動作を示す図である。地2dの断裁が完了すると、電子制御部は、載置テーブル170を断裁位置P1から退避位置P2に再び退避させる。このとき電子制御部は、載置テーブル170を逆方向に180°回転させるようチェーン222を噛合位置に進出させ、再び非噛合位置に退避させる。これによって載置テーブル170は、再び第1の周方向位置に戻される。電子制御部は、以下同様の動作を繰り返すことにより、複数の冊子2の各々に断裁処理を施す。
FIG. 12B is a diagram illustrating the operation of the mounting table 170 when the other of the top and bottom is cut and then retracted from the cutting position P1 to the retracted position P2. When the cutting of the
図13は、断裁装置10の右側面図である。図14は、断裁装置10の裏面を示す斜視図である。断裁テーブル124は、載置テーブル170が断裁位置にあるときに、載置テーブル170に載置された用紙束のうち載置テーブル170からはみ出した部分が載置される載置面124aを有する。また、断裁テーブル124は、断裁位置にあるときの載置テーブル170を収容するための凹部124bを有する。凹部124bは、断裁テーブル124の後部中央が切り取られたように形成される。
FIG. 13 is a right side view of the cutting
ガイド部材であるガイドコロ150は、載置テーブル170の移動中に、載置テーブル170に載置された用紙束のうち載置テーブル170からはみ出した部分を載置面124aに案内する。例えば用紙サイズが大きい用紙束が載置テーブル170に載置された場合、載置テーブル170からはみ出した部分が大きく垂れ下がるおそれがある。このように用紙束が大きく垂れ下がったまま載置テーブル170を退避位置から断裁位置に移動させようとすると、この垂れ下がった部分が断裁テーブル124の後部に突き当たり、用紙束を適切に載置面124a上方に搬送することができない場合が生じ得る。このようにガイドコロ150を設けることにより、このような場合においてもこの冊子のはみ出し部分が断裁テーブルに突き当たる事態を適切に回避することができる。
The
図15(a)は、載置テーブル170が退避位置P2にあるときの第1の実施形態に係る断裁装置10の左側面図である。コイルスプリング280は、載置テーブル170の移動中に載置面124aよりも載置面170aの方が高くなるよう、載置テーブル170を付勢して持ち上げる。
FIG. 15A is a left side view of the cutting
図15(b)は、載置テーブル170が断裁位置P1に進出したときの第1の実施形態に係る断裁装置10の左側面図である。このように載置テーブル170が持ち上げられているため、載置テーブル170に載置された冊子2のうち載置テーブル170からはみ出した部分が垂れ下がった場合においても、その部分が断裁テーブル124に突き当たることを回避することができる。
FIG. 15B is a left side view of the cutting
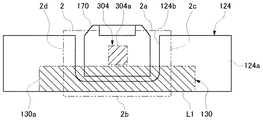
図15(c)は、載置テーブル170が断裁位置P1で保持されているときに押さえ部材130にて冊子2が押し付けられたときの第1の実施形態に係る断裁装置10の左側面図である。押さえ部材130は、載置テーブル170が断裁位置にあるときに載置面124aに向けて移動させることにより、載置テーブル170に載置された用紙束のうち載置テーブル170からはみ出した部分を断裁テーブル124に押し付ける。このとき押さえ部材130は、断裁テーブル124に用紙束を押し付ける力によって、コイルスプリング280の付勢力に抗して載置テーブル170を下降させる。
FIG. 15C is a left side view of the cutting
このように押さえ部材130の押し付け力を利用して載置テーブル170を下降させることにより、載置テーブル170を下降させるための駆動源を別途設ける必要がなくなるため、装置の構成を簡素にすることができ、載置テーブル170を持ち上げることによるコストの増加を抑制することができる。
Thus, by lowering the mounting table 170 using the pressing force of the
図16は、押さえ部材130によって押圧される領域を示す図である。図16は、載置テーブル170が断裁位置にあるときの断裁テーブル124を上方から見た状態を示している。このように凹部124bが形成されることにより、載置面124aは、断裁位置にあるときの載置テーブル170の周囲の領域のうち載置テーブル170の移動経路を除く領域内で、断裁位置にあるときの載置テーブル170を囲うように形成される。このように載置面124aを形成することにより、載置テーブル170に載置された用紙束のうち、載置テーブル170からはみ出した部分を広い範囲で載置面124aに載置させることができ、用紙束の湾曲を抑制することができる。
FIG. 16 is a diagram illustrating a region pressed by the pressing
押さえ部材130の押圧面130aは、載置テーブル170と刃先移動面L1との間の領域、載置テーブル170の上方の領域、および載置テーブル170よりも左右方向の領域において、冊子2を載置面124aに押し付けるよう設けられる。これにより、載置テーブル170を下降させつつ、冊子2を適切に固定することができる。
The
(第2の実施形態)
図17(a)は、載置テーブル170が退避位置P2にあるときの第2の実施形態に係る断裁装置の左側面図である。第2の実施形態に係る断裁装置は、中央押さえユニット300を備える以外は第1の実施形態に係る断裁装置10と同様に構成される。以下、第1の実施形態と同様の個所については同一の符号を付して説明を省略する。
(Second Embodiment)
FIG. 17A is a left side view of the cutting apparatus according to the second embodiment when the placement table 170 is at the retracted position P2. The cutting apparatus according to the second embodiment is configured in the same manner as the cutting
中央押さえユニット300は、支持部材302、押さえ部材304、およびコイルスプリング306を備える。支持部材302はL字状の部材であり、後部が下方に突出するよう押さえ部材130の裏面に一端が固定される。支持部材302の後部の下端には、コイルスプリング306を介して押さえ部材304が取り付けられる。押さえ部材304は直方体状に形成されており、下面に冊子2を下方に押し付ける押圧面304aを有する。
The central
押さえ部材304は、押圧面304aが押さえ部材130の押圧面130aよりも装置後方に位置するよう配置される。また押さえ部材304は、冊子2を押圧していない状態では押圧面304aが押さえ部材130の押圧面130aよりも下方に位置するようコイルスプリング306を介して支持部材302によって懸架される。
The pressing
図17(b)は、載置テーブル170が断裁位置P1に進出したときの第2の実施形態に係る断裁装置の左側面図である。このとき、押さえ部材304は、押圧面304aの中心がピストン274の中心、すなわち載置テーブル170の回転軸と重なるよう位置する。
FIG. 17B is a left side view of the cutting apparatus according to the second embodiment when the placement table 170 has advanced to the cutting position P1. At this time, the pressing
図17(c)は、載置テーブル170が断裁位置P1で保持されているときに押さえ部材130にて冊子2が押し付けられたときの第2の実施形態に係る断裁装置の左側面図である。図18は、押さえ部材130およびもう一方の押さえ部材304によって押圧される領域を示す図である。押さえ部材130が下降すると、最初に押さえ部材304の押圧面304aによって冊子2が下方に押し付けられる。次にコイルスプリング306が収縮して押さえ部材304と押さえ部材130の双方により冊子2が下方に押し付けられる。最終的には、冊子2は断裁テーブル124と押さえ部材130により把持される。
FIG. 17C is a left side view of the cutting apparatus according to the second embodiment when the
このように押さえ部材130が載置テーブル170に載置された冊子2のうち載置テーブル170からはみ出した部分を断裁テーブル124に押し付けるときに、押さえ部材304は、載置テーブル170に載置された冊子2のうち載置テーブル170の回転中心を含む部分を下方に押し付けることにより載置テーブル170を下降させる。押さえ部材304は、載置テーブル170の回転中心、すなわちピストン274の中心を下方に押し付けるため、ピストン274とシリンダ276との間のかじりの発生を抑制することができ、冊子2を円滑に下降させることができる。
In this way, when the
なお、支持部材302およびコイルスプリング306が省略され、押さえ部材304が押さえ部材130と一体的に形成されていてもよい。このとき、押圧面304aと押圧面130aが同一平面上に位置するよう押さえ部材304および押さえ部材130が構成されてもよい。これによっても載置テーブル170を円滑に下降させることができる。
Note that the
(第3の実施形態)
図19は、第3の実施形態に係るイニシャル位置検知機構400の構成を示す図である。図19は、テーブルユニット16およびテーブル移動機構18を図4の視点Sから見た状態を示している。以下、上述の実施形態と同様の個所については同一の符号を付して説明を省略する。
(Third embodiment)
FIG. 19 is a diagram illustrating a configuration of an initial
例えば断裁位置と退避位置との間で、電源がオフにされるなど何かしらの原因で載置テーブル170の周方向位置を装置が把握することが困難となる事態が生じ得る。このような場合、載置テーブル170の位置を再び適切に把握する必要がある。このため、第3の実施形態に係る断裁装置には、イニシャル位置検知機構400が設けられている。イニシャル位置検知機構400が設けられた以外は、第3の実施形態に係る断裁装置の構成は、上述の実施形態にいずれかに係る断裁装置と同様である。
For example, it may be difficult for the device to grasp the circumferential position of the mounting table 170 between the cutting position and the retracted position for some reason, such as when the power is turned off. In such a case, it is necessary to properly grasp the position of the mounting table 170 again. For this reason, the cutting apparatus according to the third embodiment is provided with an initial
イニシャル位置検知機構400は、被検知部材404、光センサ406、被検知部材410、および光センサ412を有する。被検知部材404は、載置テーブル170とともに回転するよう載置テーブル170に対して固定されている。光センサ406は、被検知部材404を検知することにより載置テーブル170の回転方向の位置(周方向位置)を検知する。
The initial
具体的には、被検知部材404は、載置テーブル170の回転中心に対し径外向きに突出する突出部404aを有する。光センサ406は、発光素子と受光素子を含み、一方が装置前方、他方が装置後方に配置されている。光センサ406は、光の遮蔽を検知すべき対象個所である検知ラインXが載置テーブル170の移動方向と平行になるように配置されている。被検知部材404は、チェーン222を進出させてスプロケット220に噛合させたときの載置テーブル170の回転に伴い、突出部404aが検知ラインXに進出および退避するよう設けられる。光センサ406は、突出部404aが検知ラインXに進出したときに検知ラインXを通過する光が遮断され、突出部404aを検知する。光センサ406は、被検知部材404が回転して検知ラインXに到達した突出部404aを検知することにより、載置テーブル170の周方向位置を検知する。
Specifically, the detected
例えば載置テーブル170に周方向位置を検知するセンサを設けると、載置テーブル170の移動に伴うセンサケーブルの移動スペースを確保する必要がある。このため、イニシャル位置検知機構400では、載置テーブル170が搭載されたテーブルユニット16には被検知部材404だけが設けられ、光センサ406はフレーム200に取り付けられている。このように載置テーブル170の周方向位置を検知するセンサのテーブルユニット16への搭載を回避することで、センサに接続するためのケーブルが載置テーブル170とともに移動することなどを考慮する必要がなくなる。このため、センサに接続するケーブルが占有するスペースを抑制でき、装置の小型化または低コスト化を実現することができる。
For example, when a sensor for detecting a circumferential position is provided on the mounting table 170, it is necessary to secure a movement space for the sensor cable accompanying the movement of the mounting table 170. For this reason, in the initial
光センサ412は、フレーム200に固定された支持部材に取り付けられる。被検知部材410は、テーブルユニット16の支持ブラケット172に取り付けられる。光センサ412は、載置テーブル170がある位置に移動したときに被検知部材410を検知するよう設けられる。以下、光センサ412によって被検知部材410が検知されたときの載置テーブル170の位置を「原点」という。したがって、光センサ412は、載置テーブル170の原点位置を検知する原点センサとして機能する。
The
図20は、第3の実施形態に係るイニシャル位置検知機構400によるイニシャライズ処理の手順を示すフローチャートである。本フローチャートにおける処理は、断裁装置10においてスタートボタンがユーザに押されて断裁処理が開始してから、断裁処理が中止または中断するまで処理時間毎に繰り返し実行される。
FIG. 20 is a flowchart showing a procedure of initialization processing by the initial
電子制御部は、イニシャライズ処理が必要か否かを判定する(S10)。イニシャライズ処理が必要な場合とは、例えば、断裁処理中に装置のドアがユーザに開けられて電子制御部が断裁処理を中断し、その後ドアが閉められて電子制御部が断裁処理を再開させるときや、断裁処理中に停電やユーザによって電源がオフにされ、再び断裁装置10に電源が投入された場合などが該当する。なお、イニシャライズ処理が必要な場合がこれらの場合に限られないことは勿論であり、断裁処理中に載置テーブル170の周方向位置を電子制御部が認識不能となる他の場合もイニシャライズ処理が必要となる。イニシャライズ処理が必要でない場合(S10のN)、本フローチャートにおける処理を終了する。 The electronic control unit determines whether or not an initialization process is necessary (S10). The case where the initialization process is necessary is, for example, when the device door is opened by the user during the cutting process, the electronic control unit interrupts the cutting process, and then the door is closed and the electronic control unit resumes the cutting process. In addition, a case where a power failure or a user power is turned off by the user during the cutting process and the power is turned on again is applicable. Of course, the case where the initialization process is necessary is not limited to these cases, and the initialization process is also performed in other cases where the electronic control unit cannot recognize the circumferential position of the mounting table 170 during the cutting process. Necessary. If the initialization process is not necessary (N in S10), the process in this flowchart is terminated.
イニシャライズ処理が必要な場合(S10のY)、電子制御部は、載置テーブル170を原点に移動させる(S12)。載置テーブル170が原点に移動すると、電子制御部は、チェーン222が進出してスプロケット220に噛合開始する噛合開始位置に向けて、断裁位置P1に向かう方向(以下「進出方向」という)に載置テーブル170を移動させる(S14)。
When the initialization process is necessary (Y in S10), the electronic control unit moves the placement table 170 to the origin (S12). When the placement table 170 moves to the origin, the electronic control unit places the
噛合開始位置まで載置テーブル170が移動されると、電子制御部は、チェーン222を進出させてスプロケット220に噛合させる(S16)。このとき、載置テーブル170は引き続き進出方向に移動するため、載置テーブル170および被検知部材404の回転が開始する。
When the mounting table 170 is moved to the meshing start position, the electronic control unit advances the
電子制御部は、光センサ406によって突出部404aが検知されたか否かを判定する(S18)。突出部404aが検知されない場合(S18のN)、電子制御部は、噛合開始位置からの載置テーブル170の回転角度が90度に達したか否かを判定し(S26)、達していない場合(S26のN)、S18の判定に戻る。こうして電子制御部は、載置テーブル170が90度回転している間、すなわち載置テーブル170が噛合開始位置から、チェーン222がスプロケット220から退避して載置テーブル170の回転を停止させる噛合終了位置まで移動する間、所定時間毎にS18の判定を繰り返す。第3の実施形態では、この1工程の間に載置テーブル170が90度回転することから、多くても4工程の間に突出部404aが光センサ406に検知されることになる。
The electronic control unit determines whether the protruding
載置テーブル170の回転角度が90度に達した場合(S26のY)、電子制御部は、載置テーブル170の進出方向への移動を停止させた直後にチェーン222を退避させて載置テーブル170の回転を停止させ(S28)、S12に戻る。すなわち、載置テーブル170を再び噛合開始位置に戻し、チェーン222を進出させてスプロケット220に噛合させてから載置テーブル170を進出方向に移動させ、噛合終了位置に到達するまでの間、載置テーブル170を回転させながら光センサ406によって突出部404aが検知されたか否かを判定する。電子制御部は、光センサ406によって突出部404aが検知されるまでこの工程を繰り返す。
When the rotation angle of the mounting table 170 reaches 90 degrees (Y in S26), the electronic control unit retracts the
突出部404aが検知された場合(S18のY)、電子制御部は、突出部404aの検知後も引き続き載置テーブル170を進出方向に移動させ、第1の周方向位置に位置するよう載置テーブル170の角度を微調整する(S20)。載置テーブル170が第1の周方向位置に位置すると、電子制御部は、チェーン222を退避させ(S22)、載置テーブル170を退避方向に移動させて原点に移動させる(S24)。
When the protruding
図21は、第3の実施形態に係るイニシャライズ処理を実行したときの被検知部材404の動きを模式的に示した物である。図21は、図19と同様に被検知部材404を下方から見た状態を示している。図21では、原点を「P10」、噛合開始位置を「P11」、噛合終了位置を「P12」、光センサ406による検知ラインを「X」として示している。
FIG. 21 schematically shows the movement of the detected
イニシャライズ処理を要すると判定した場合、電子制御部は、(a)に示すように、載置テーブル170を(すなわち被検知部材404を)原点P10に移動させてから進出方向に被検知部材404を移動させる。被検知部材404が噛合開始位置P11まで達すると、電子制御部は、チェーン222を進出させてスプロケット220に噛合させる。電子制御部は、(b)に示すように被検知部材404を引き続き進出方向に移動させ、これにより被検知部材404の回転が開始する。
If it is determined that the initialization process is required, the electronic control unit moves the placement table 170 (that is, the detected member 404) to the origin P10 and moves the detected
電子制御部は、被検知部材404が回転しながら噛合開始位置P11から噛合終了位置P12へと移動する間に、光センサ406によって突出部404aが検知されたか否かを監視する。図21に示す例では、(c)に示すように、被検知部材404が噛合開始位置P11から噛合終了位置P12へと1回目に移動する間では、突出部404aは検知ラインXに到達しない。このため電子制御部は、噛合終了位置P12において被検知部材404の移動を停止させると共に、チェーン222を退避させスプロケット220との噛合を解除させ、(c)に示すように今度は被検知部材404を退避方向に移動させる。このとき被検知部材404は回転することなく退避方向に移動する。
The electronic control unit monitors whether the protruding
被検知部材404が噛合開始位置P11に到達すると、電子制御部は被検知部材404の退避方向への移動を停止させ、再びチェーン222を進出させてスプロケット220に噛合させて、(d)に示すように再び被検知部材404を進出方向に移動させる。これにより、被検知部材404は、再び回転しながら進出方向に移動する。
When the detected
図21に示す例では、被検知部材404を噛合開始位置P11と噛合終了位置P12との間で移動させる2回目の工程において、突出部404aが検知ラインXに達し、突出部404aが光センサ406によって検知される。このときの被検知部材404の位置を検知位置P13とする。
In the example shown in FIG. 21, in the second step of moving the detected
(e)に示すように、被検知部材404が検知位置P13にあるときには、突出部404aは図21における上方向、すなわち断裁装置10における装置左方向に向いていない。第3の実施形態では、突出部404aが装置左方向に向いたときに載置テーブル170が第1の周方向位置に位置するよう設けられる。このため電子制御部は、(e)に示すように、検知位置P13から被検知部材404をさらに進出方向に移動させて被検知部材404を回転させ、載置テーブル170の周方向位置を微調整する。
As shown to (e), when the to-
載置テーブル170を進出方向および退避方向に移動させるためのアクチュエータであるモータ204は、ステッピングモータによって構成されている。モータ204は、電子制御部から与えられるステップ信号のステップ数に相当する角度だけボールネジ202を回転させて載置テーブル170を移動させる。一方、電子制御部は、モータ204に取り付けられたエンコーダから発信される回転量信号を受信することにより、モータ204の実際の回転角度を把握することができ、さらに被検知部材404の回転角度を把握することができる。
The
なお、モータ204は、サーボモータによって構成されてもよい。この場合、電子制御部は、モータ204から発信されるFG(Frequency Generator)信号を受信することにより、モータ204の実際の回転角度を把握することができ、さらに被検知部材404の回転角度を把握することができる。
The
電子制御部は、突出部404aが光センサ406によって検知されたときから突出部404aが装置左方向に向くまで、すなわち載置テーブル170が第1の周方向位置に位置するまでに受信すべきモータ204の回転量信号の基準値を保持している。電子制御部は、突出部404aが光センサ406によって検知されてからモータ204の回転量信号を用いて被検知部材404の回転角度を監視し、保持している基準値に回転量信号が到達したときに、載置テーブル170が第1の周方向位置に位置したと判定して被検知部材404の進出方向への移動を停止させてその回転を停止させる。こうして(f)に示すように、突出部404aを装置左方向(図21における上方向)に向かせて、載置テーブル170を第1の周方向位置に位置させることができる。
The electronic control unit is a motor that should be received from when the protruding
なお、電子制御部は、突出部404aが光センサ406によって検知されたときから突出部404aが装置左方向に向くまで、すなわち載置テーブル170が第1の周方向位置に位置するまでにモータ204に与えるべきステップ数の基準値を保持していてもよい。電子制御部は、突出部404aが光センサ406によって検知されてからモータ204に与えたステップ数をカウントして被検知部材404の回転角度を監視し、保持している基準値にステップ数が到達したときに、載置テーブル170が第1の周方向位置に位置したとして被検知部材404の進出方向への移動を停止させてその回転を停止させてもよい。これによっても載置テーブル170を第1の周方向位置に適切に配置させることができる。
It should be noted that the electronic control unit determines that the
最後に電子制御部は、チェーン222をスプロケット220から退避させた後、被検知部材404を再び退避方向に移動させ、(g)に示すように原点P10にて停止させる。この後、電子制御部は、イニシャライズ処理を実行するために中断していた断裁処理を再開するなど、所定の処理を実行する。
Finally, after the
(第4の実施形態)
図22(a)および図22(b)は、第4の実施形態に係るイニシャル位置検知機構500の構成を示す図である。図22(a)は、スプロケット220および噛合切替機構224周辺を、載置テーブル170の退避方向に向いて見た状態を示しており、図22(b)は、図22(a)のT−T断面図である。
(Fourth embodiment)
FIG. 22A and FIG. 22B are diagrams showing a configuration of an initial
イニシャル位置検知機構500は、進退ユニット502、スリット板504、およびテーブル側ピン506を備える。進退ユニット502は、噛合切替機構224に設けられている。スリット板504は円盤状に形成され、スプロケット220と位置決めロータ252との間にそれらと同軸に配置される。スリット板504は、載置テーブル170の回転中心に対し径内向きに凹む凹部504aを有する。テーブル側ピン506は、支持ブラケット172の下面から下方に突出するように支持ブラケット172に固定される。したがってテーブル側ピン506は、載置テーブル170、スプロケット220、およびスリット板504とともに断裁位置P1と退避位置P2との間を移動する。
The initial
進退ユニット502は、センサユニット510、ガイド512、およびコイルスプリング514を有する。ガイド512は、チェーン222よりも上方において載置テーブル170の移動方向と平行に延在するようロッド228に取り付けられる。ガイド512は、載置テーブル170の移動方向と平行に移動可能にセンサユニット510を支持する。
The advance /
センサユニット510は、センサベース520、センサ側ピン522、および光センサ524を有する。センサベース520は、ガイド512によって支持される部分となっている。センサ側ピン522は、センサベース520からテーブル側ピン506の移動領域に向かう方向に突出するようセンサベース520に固定される。センサ側ピン522は、チェーン222が退避位置にあるときには、テーブル側ピン506の移動領域から退避し、噛合切替機構224によってチェーン222が進出位置に進出したときにテーブル側ピン506の移動領域に進出するよう設けられる。
The
光センサ524は、センサベース520よりもスリット板504の移動領域に向かって突出するようセンサベース520に固定される。光センサ524は、チェーン222が退避する方向に凹む凹部を有し、発光素子と受光素子とがこの凹部の上方および下方の各々にそれぞれ配置され構成されている。したがって、光センサ524は、この凹部の内部が検知範囲となる。光センサ524は、チェーン222が退避位置にあるときには、スリット板504の移動領域が検知範囲外となり、噛合切替機構224によってチェーン222が進出位置に進出したときにスリット板504の移動領域が検知範囲内となるよう設けられる。スリット板504の凹部504aがこの光センサ524によって検知されることによって、電子制御部は載置テーブル170の周方向位置を把握する。このためスリット板504は、光センサ524によって検知される被検知部材として機能する。
The
コイルスプリング514は、センサベース520の装置後方側の側面と、フレーム200に固定された支持部材とに両端の各々が取り付けられる。コイルスプリング514は、センサユニット510を装置後方、すなわち載置テーブル170の退避方向に付勢する付勢部材として機能する。
Each end of the
図22(a)および(b)は、チェーン222が退避位置にあるときのイニシャル位置検知機構500の状態を示している。このときセンサ側ピン522はテーブル側ピン506の移動領域から退避し、光センサ524は、スリット板504の移動領域が検知範囲外となっている。
22A and 22B show the state of the initial
図23(a)および図23(b)は、チェーン222を進出位置に進出させたときのイニシャル位置検知機構500の状態を示す図である。載置テーブル170が噛合開始位置P11まで進出方向に移動すると、噛合切替機構224によってチェーン222が進出位置に進出される。このとき、センサ側ピン522はテーブル側ピン506の移動領域に進出し、スリット板504の移動領域が光センサ524の検知範囲内となる。
FIG. 23A and FIG. 23B are views showing the state of the initial
テーブル側ピン506は、チェーン222が進出位置に進出したときには、センサ側ピン522に当接しないようセンサ側ピン522よりもわずかに載置テーブル170の退避方向に位置するよう配置されている。チェーン222が進出位置に進出後、さらに載置テーブル170が進出方向に移動することによって、テーブル側ピン506がセンサ側ピン522に当接し、センサユニット510を進出方向に押し進め始める。こうして光センサ406は、載置テーブル170とともに進出方向に移動する。
The table-
このとき、チェーン222はスプロケット220に噛合しているため、載置テーブル170の進出方向への移動に伴い、スプロケット220およびスリット板504が回転する。光センサ406は、載置テーブル170とともに進出方向に移動しながら、回転するスリット板504の凹部504aを検知することにより、載置テーブル170の周方向位置を検知する。図23(a)および図23(b)は、チェーン222が進出位置に進出した後、テーブル側ピン506がセンサ側ピン522に当接した直後の状態を示している。
At this time, since the
図24(a)は、光センサ524によってスリット板504の凹部504aが検知されたときのイニシャル位置検知機構500の状態を示す図であり、図24(b)は、図24(a)の状態からチェーン222を退避位置まで退避させたときのイニシャル位置検知機構500の状態を示す図である。
FIG. 24A is a diagram illustrating a state of the initial
スリット板504の回転開始から90度回転するまでにスリット板504の凹部504aが装置左側、すなわち図24(a)における左側まで達する場合、光センサ524は、凹部504aの到達によりスリット板504での遮光が解除されることによって凹部504aを検知する。電子制御部は、凹部504aが検知されてから、第1の周方向位置に位置するまで載置テーブル170の回転角度を後述するように微調整した後、載置テーブル170の進出方向への移動を停止させ、さらにチェーン222を退避位置まで退避させる。
When the
これにより、チェーン222とスプロケット220との噛合が解除された状態で載置テーブル170が第1の周方向位置に保持される。このとき、図24(b)に示すように、コイルスプリング514の付勢力によってセンサユニット510が載置テーブル170の退避方向に戻される。このようにスリット板504に凹部504aを設けることによっても、載置テーブル170が設けられたテーブルユニット16にセンサを設けることなく、載置テーブル170の周方向位置を適切に把握することが可能となる。
Thereby, the mounting table 170 is held at the first circumferential position in a state where the engagement between the
図25は、第4の実施形態に係るイニシャル位置検知機構500によるイニシャライズ処理の手順を示すフローチャートである。本フローチャートにおける処理は、断裁装置10においてスタートボタンがユーザに押されて断裁処理が開始してから、断裁処理が中止または中断するまで処理時間毎に繰り返し実行される。以下、図20に示すフローチャートと同様の処理については同一のステップ番号を付して説明を省略する。
FIG. 25 is a flowchart showing a procedure of initialization processing by the initial
図25に示すフローチャートは、S18およびS20に代えてS40およびS42が設けられた以外は、図20に示すフローチャートと同様である。噛合開始位置P11まで載置テーブル170が移動され、チェーン222が進出してスプロケット220に噛合すると(S16)、電子制御部は、載置テーブル170が90度回転している間、すなわち載置テーブル170が噛合開始位置P11から噛合終了位置P12まで移動する間、光センサ524によって凹部504aが検知されたか否かを所定時間毎に判定する(S40)。凹部504aが検知されない場合(S40のN)、S26の判定に移行する。
The flowchart shown in FIG. 25 is the same as the flowchart shown in FIG. 20 except that S40 and S42 are provided instead of S18 and S20. When the mounting table 170 is moved to the meshing start position P11 and the
このとき電子制御部は、光センサ524によって凹部504aが検知されるまで、載置テーブル170を再び噛合開始位置に戻しチェーン222をスプロケット220に噛合させてから載置テーブル170を再び進出方向に移動させてスリット板504を回転させながら光センサ524によって凹部504aが検知されたか否かを判定する、という工程を繰り返す。
At this time, until the
凹部504aが検知された場合(S40のY)、電子制御部は、凹部504aの検知後も引き続き載置テーブル170を進出方向に移動させ、第1の周方向位置に位置するよう載置テーブル170の角度を微調整する(S42)。
When the
第4の実施形態では、凹部504aが装置左方向に向いたときに載置テーブル170が第1の周方向位置に位置するよう設けられている。しかしながら、第3の実施形態における突出部404aの検知と同様に、凹部504aが光センサ524によって検知されたときも、凹部504aは装置左方向に完全に向く位置までわずかに達していない。このため電子制御部は、凹部504aが検知された位置から載置テーブル170をさらに進出方向に移動させてスリット板504を回転させ、第1の周方向位置に載置テーブル170が位置するよう載置テーブル170の周方向位置を微調整する。
In the fourth embodiment, the mounting table 170 is provided at the first circumferential position when the
電子制御部は、凹部504aが光センサ524によって検知されたときから凹部504aが装置左方向に向くまで、すなわち載置テーブル170が第1の周方向位置に位置するまでに受信すべきモータ204の回転量信号の基準値を保持している。電子制御部は、凹部504aが光センサ524によって検知されてからモータ204の回転量信号を用いてスリット板504の回転角度を監視し、保持している基準値に回転量信号が到達したときに、載置テーブル170が第1の周方向位置に位置したとして載置テーブル170の進出方向への移動を停止させてスリット板504の回転を停止させる。これにより、凹部504aを装置左方向に向かせて、載置テーブル170を第1の周方向位置に位置させることができる。
The electronic control unit detects the
なお、電子制御部は、凹部504aが光センサ524によって検知されたときから凹部504aが装置左方向に向くまでにモータ204に与えるべきステップ数の基準値を保持していてもよい。電子制御部は、凹部504aが光センサ524によって検知されてからモータ204に与えたステップ数をカウントしてスリット板504の回転角度を監視し、保持している基準値にステップ数が到達したときに、載置テーブル170が第1の周方向位置に位置したとしてスリット板504の進出方向への移動を停止させてその回転を停止させてもよい。
The electronic control unit may hold a reference value for the number of steps to be given to the
本発明は上述の実施形態に限定されるものではなく、第1の実施形態の各要素を適宜組み合わせたものも、本発明の実施形態として有効である。また、当業者の知識に基づいて各種の設計変更等の変形を第1の実施形態に対して加えることも可能であり、そのような変形が加えられた実施形態も本発明の範囲に含まれうる。以下、そうした例をあげる。 The present invention is not limited to the above-described embodiment, and an appropriate combination of the elements of the first embodiment is also effective as an embodiment of the present invention. Various modifications such as design changes can be added to the first embodiment based on the knowledge of those skilled in the art, and embodiments to which such modifications are added are also included in the scope of the present invention. sell. Here are some examples.
ある変形例では、垂直駆動機構90および水平駆動機構92に代えて、第1駆動機構および第2駆動機構が設けられる。第1駆動機構は、水平方向ではない所定方向に延在する第1ラインに沿って刃物40を駆動する。第2駆動機構は、第1ラインと角度をもって延在する、垂直方向ではない所定方向に延在する第2ラインに沿って刃物40を駆動する。このようにそれぞれの駆動機構が水平または垂直に刃物40を駆動しない場合においても、それぞれの駆動方向が角度を持っている場合には、それぞれのリニアガイドによる駆動速度を調整することにより、任意の方向に刃物40を移動させることができる。
In a modification, a first drive mechanism and a second drive mechanism are provided in place of the
ある別の変形例では、テーブル移動機構18に代えて、載置テーブル170に載置された用紙束が断裁されるべき断裁位置と、断裁位置よりも載置テーブル170と刃物の刃先が移動すべき刃先移動面とが離間した退避位置と、の間で載置テーブル170と刃先移動面との相対位置を移動させる移動手段が設けられる。移動手段は、断裁機構14を載置テーブル170に向けて進退させる移動機構であってもよい。このときもコイルスプリング280は、載置テーブル170と刃先移動面と相対位置の移動中に載置面124aよりも載置面170aの方が高くなるよう、載置テーブル170を付勢して持ち上げる。また、押さえ部材130は、断裁テーブル124に用紙束を押し付ける力によって、コイルスプリング280の付勢力に抗して載置テーブル170を下降させる。これにより、例えば載置テーブル170を移動させずに刃物40を載置テーブル170に向けて移動させる場合においても、載置テーブル170に載置された用紙束の垂れ下がった部分が断裁テーブル124に突き当たる事態を回避することができる。
In another modification, instead of the
ある別の変形例では、断裁装置10には、用紙束を断裁するときの刃物40の移動方向をユーザがマウスまたはキーボードなどの入力装置を用いて入力することが可能となっている。電子制御部は、こうして入力された刃物40の移動方向を取得する。したがって電子制御部は、断裁時の刃物40の移動方向を取得する移動方向取得手段として機能する。電子制御部は、取得した移動方向に刃物40を移動させて用紙束を断裁するよう垂直駆動機構90または水平駆動機構92の作動を制御する。
In another variation, the cutting
用紙束を断裁するときの刃物40の適切な移動方向は、用紙束の厚さなどによって異なる。これにより、例えば厚い冊子や厚紙など比較的断裁しにくいものは、用紙束の表面に対する傾斜角度が小さくなるよう刃物40の移動方向を入力することにより、より適切に用紙束を断裁することが可能となる。
An appropriate moving direction of the
ある別の変形例では、載置テーブル170とスプロケット220とに介在するワンウェイクラッチが設けられる。この場合、回転機構176は、載置テーブル170が断裁位置に進出するとき、および退避位置に退避するときの双方において、チェーン222を進出させたまま保持する。このようにワンウェイクラッチを設けることによって、往路および復路の一方で載置テーブルを回転させ、他方で載置テーブルを回転させることを回避することができる。このため、チェーン222の退避動作を省略することが可能となる。
In another modification, a one-way clutch interposed between the mounting table 170 and the
ある別の変形例では、第2の噛合切替機構が設けられる。第2の噛合切替機構は、第2のチェーンを有する。第2のチェーンは、チェーン222とスプロケット220を挟んだ反対側に設けられる。第2のチェーンは、チェーン222の噛み合い位置とは反対側の位置においてスプロケット220と噛み合う噛合位置と、スプロケット220と噛み合わない非噛合位置との間で進退可能に設けられる。その他の第2の噛合切替機構の構成は、噛合切替機構224と同様である。このようにチェーン222とスプロケット220を挟んだ反対側に第2のチェーンを設けることにより、載置テーブル170の往路および復路の双方で同じ方向に載置テーブル170を回転させることができる。
In another modification, a second meshing switching mechanism is provided. The second meshing switching mechanism has a second chain. The second chain is provided on the opposite side across the
例えば図10(a)において、退避位置P2にあるときに第1の周方向位置から逆方向に90°回転させた第4の周方向位置を初期位置とする。ここで、断裁位置P1に載置テーブル170が進出するときには、載置テーブル170を90°回転させて第1の周方向位置とするよう、チェーン222を噛合位置に進出させ、および非噛合位置に退避させる。また、図12(b)において、チェーン222で載置テーブル170を逆方向に180°回転させることに代えて、載置テーブル170を90°回転させて第4の周方向位置とするよう、第2の噛合切替機構により第2のチェーンを噛合位置に進出させ、および非噛合位置に退避させる。このように第2の噛合切替機構を設けることで、載置テーブル170を180°回転させることなく初期位置に戻すことができる。このため、チェーン222や第2のチェーンの長さを抑制することができ、噛合切替機構のサイズを抑制することができる。
For example, in FIG. 10 (a), a fourth circumferential position rotated 90 ° in the reverse direction from the first circumferential position when in the retracted position P2 is set as the initial position. Here, when the mounting table 170 advances to the cutting position P1, the
10 断裁装置、 14 断裁機構、 16 テーブルユニット、 18 テーブル移動機構、 20 用紙押さえ機構、 40 刃物、 80 垂直リニアガイド機構、 82 水平リニアガイド機構、 86 第1油圧シリンダ、 88 第2油圧シリンダ、 90 垂直駆動機構、 92 水平駆動機構、 124 断裁テーブル、 124a 載置面、 124b 凹部、 130 押さえ部材、 130a 押圧面、 144 ガイド、 170 載置テーブル、 170a 載置面、 176 回転機構、 180 クランパ、 202 ボールネジ、 204 モータ、 220 スプロケット、 222 チェーン、 224 噛合切替機構、 250 ロック機構、 252a 切り欠き部、 254 位置決めピン、 270 付勢支持機構、 280 コイルスプリング。
DESCRIPTION OF
Claims (10)
用紙束が載置されるべき載置面を有する載置テーブルと、
載置された用紙束が断裁されるべき断裁位置と、断裁位置よりも前記刃物の刃先が移動する刃先移動面から離間した退避位置と、の間で前記載置テーブルを移動させるテーブル移動手段と、
断裁位置から退避位置に退避し再び断裁位置に進出する間に、前記載置テーブルに載置された用紙束の断裁すべき個所を切り替えるよう前記載置テーブルを回転させる回転機構と、
を備えることを特徴とする断裁装置。 A cutter provided movably to cut a bundle of paper,
A placement table having a placement surface on which the sheet bundle is to be placed;
A table moving means for moving the mounting table between a cutting position at which the stacked sheet bundle is to be cut, and a retreat position separated from a cutting edge moving surface to which the cutting edge of the blade moves than the cutting position; ,
A rotation mechanism that rotates the placement table so as to switch a portion to be cut of a bundle of sheets placed on the placement table while retreating from the cutting position to the retracted position and re-entering the cutting position;
A cutting apparatus comprising:
前記載置テーブルと共に移動および回転するよう設けられた回転部材と、
前記載置テーブルの移動中に前記回転部材に噛み合うことによって前記載置テーブルを回転させるよう配置された噛合部材と、
を有することを特徴とする請求項2に記載の断裁装置。 The rotation mechanism is
A rotating member provided to move and rotate together with the mounting table;
A meshing member arranged to rotate the mounting table by meshing with the rotating member during movement of the mounting table;
The cutting apparatus according to claim 2, further comprising:
前記被検知部材を検知することにより前記載置テーブルの回転方向の位置を検知するセンサと、
を備えることを特徴とする請求項1から7のいずれかに記載の断裁装置。 A detected member that rotates together with the mounting table;
A sensor that detects the position of the mounting table in the rotational direction by detecting the detected member;
The cutting device according to any one of claims 1 to 7, further comprising:
前記センサは、前記突出部を検知することにより、前記載置テーブルの回転方向の位置を検知することを特徴とする請求項8に記載の断裁装置。 The detected member has a protruding portion that protrudes radially outward with respect to the rotation center of the table.
The cutting apparatus according to claim 8, wherein the sensor detects the position of the mounting table in the rotation direction by detecting the protruding portion.
前記センサは、前記載置テーブルとともに移動しながら前記凹部を検知することにより、前記載置テーブルの回転方向の位置を検知することを特徴とする請求項8に記載の断裁装置。 The detected member has a recess that is recessed radially inward with respect to the rotation center of the table.
The cutting apparatus according to claim 8, wherein the sensor detects a position in a rotation direction of the mounting table by detecting the concave portion while moving together with the mounting table.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010166171A JP2011045989A (en) | 2009-07-27 | 2010-07-23 | Cutting device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009174182 | 2009-07-27 | ||
| JP2010166171A JP2011045989A (en) | 2009-07-27 | 2010-07-23 | Cutting device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011045989A true JP2011045989A (en) | 2011-03-10 |
| JP2011045989A5 JP2011045989A5 (en) | 2013-12-12 |
Family
ID=43832817
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010166171A Pending JP2011045989A (en) | 2009-07-27 | 2010-07-23 | Cutting device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011045989A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106926305A (en) * | 2017-03-27 | 2017-07-07 | 郑红艳 | One kind is used for bicycle gaseous core automatic fixed-length cutter |
| JP2018199221A (en) * | 2017-05-25 | 2018-12-20 | 芳野マシナリー株式会社 | Bookbinding device and bookbinding method |
| CN113618820A (en) * | 2021-07-28 | 2021-11-09 | 宁国市裕华电器有限公司 | Punching and shearing device for alternating current filter capacitor positioning sleeve and fixing mechanism thereof |
| JP7327795B2 (en) | 2019-10-01 | 2023-08-16 | ホリゾン・インターナショナル株式会社 | Cutting machine |
| US11970018B2 (en) | 2019-10-01 | 2024-04-30 | Horizon International Inc. | Trimmer |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0559459U (en) * | 1992-01-10 | 1993-08-06 | 大日本スクリーン製造株式会社 | Original film punch / cut device |
| JP2003071779A (en) * | 2001-08-31 | 2003-03-12 | Horizon International Inc | Rotary paper sheet cutting device |
| JP2009113152A (en) * | 2007-11-06 | 2009-05-28 | Nisca Corp | Sheet bundle cutter and bookbinding machine |
-
2010
- 2010-07-23 JP JP2010166171A patent/JP2011045989A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0559459U (en) * | 1992-01-10 | 1993-08-06 | 大日本スクリーン製造株式会社 | Original film punch / cut device |
| JP2003071779A (en) * | 2001-08-31 | 2003-03-12 | Horizon International Inc | Rotary paper sheet cutting device |
| JP2009113152A (en) * | 2007-11-06 | 2009-05-28 | Nisca Corp | Sheet bundle cutter and bookbinding machine |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106926305A (en) * | 2017-03-27 | 2017-07-07 | 郑红艳 | One kind is used for bicycle gaseous core automatic fixed-length cutter |
| JP2018199221A (en) * | 2017-05-25 | 2018-12-20 | 芳野マシナリー株式会社 | Bookbinding device and bookbinding method |
| JP7002740B2 (en) | 2017-05-25 | 2022-01-20 | 芳野Ymマシナリー株式会社 | Bookbinding device, bookbinding method |
| JP7327795B2 (en) | 2019-10-01 | 2023-08-16 | ホリゾン・インターナショナル株式会社 | Cutting machine |
| US11970018B2 (en) | 2019-10-01 | 2024-04-30 | Horizon International Inc. | Trimmer |
| CN113618820A (en) * | 2021-07-28 | 2021-11-09 | 宁国市裕华电器有限公司 | Punching and shearing device for alternating current filter capacitor positioning sleeve and fixing mechanism thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011025369A (en) | Cutting device | |
| JP2011045989A (en) | Cutting device | |
| JP6065123B2 (en) | Press machine and press method | |
| EP1777040A2 (en) | Power tool | |
| JP6001341B2 (en) | Overlock sewing machine | |
| JP2011078987A (en) | Device and method for manufacturing work | |
| EP2001781A1 (en) | Apparatus for forming stacks of panels and feeding them to a user station | |
| JP5941141B2 (en) | Trimming device | |
| JP5521167B2 (en) | Cutting device | |
| JP4753956B2 (en) | Paper cutter | |
| EP2233236B1 (en) | Method and machine for cutting wood panels or the like | |
| EP3012195B1 (en) | Packaging machine core and cut belt warming and sticking method therefor | |
| JP6067217B2 (en) | Sheet punching apparatus and post-processing apparatus having the same | |
| JP5636256B2 (en) | Feeder | |
| JP2011140819A (en) | Lid locking device | |
| JP2009226142A (en) | Threading device of sewing machine | |
| JP6147140B2 (en) | Rack stage | |
| JP2010504860A (en) | Plate presser for plate cutting machine | |
| JP2011045989A5 (en) | ||
| JP2005229781A (en) | Device for pressing stacked work | |
| KR20140118656A (en) | Auxiliary device for releasing a tool from a main shaft of a cnc milling machine | |
| JP5717552B2 (en) | Media processing device | |
| JP5807153B2 (en) | Paper punching device | |
| JP2013086231A (en) | Electric stapler | |
| JP5741953B2 (en) | Punching device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130723 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130723 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130725 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130819 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130820 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140527 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140529 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140930 |