JP2010143567A - 走行情報を出力するための方法及び装置 - Google Patents
走行情報を出力するための方法及び装置 Download PDFInfo
- Publication number
- JP2010143567A JP2010143567A JP2009282377A JP2009282377A JP2010143567A JP 2010143567 A JP2010143567 A JP 2010143567A JP 2009282377 A JP2009282377 A JP 2009282377A JP 2009282377 A JP2009282377 A JP 2009282377A JP 2010143567 A JP2010143567 A JP 2010143567A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- acceleration
- travel information
- inf
- actual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/84—Data processing systems or methods, management, administration
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Instrument Panels (AREA)
Abstract
【解決手段】車両(20)のドライバーにエネルギー消費的に最適な走行状態を指示する、走行情報(INF)を出力する方法は、車両の実際の運転状態パラメータの内の少なくとも一つ(P1)並びに走行抵抗パラメータの内の少なくとも一つ(P2)に応じて燃費的に最適な車両目標加速度(B1)を測定し、車両実加速度(B2)を測定し、測定された車両目標加速度(B1)と車両実加速度(B2)とに応じて走行情報INFを生成し、走行情報(INF)を出力する。
【選択図】図1
Description
車両の実際の運転状態パラメータの内の少なくとも一つ並びに走行抵抗パラメータの内の少なくとも一つに応じた、燃費的に最適な車両目標加速を測定するステップと、
車両実加速度を測定するステップと、
測定された車両目標加速度と車両実加速度とに応じた走行情報を生成するステップと、
走行情報を出力するステップと、
を含む。
車の実際の運転状態パラメータの内の少なくとも一つ並びに走行抵抗パラメータの内の少なくとも一つに応じて、燃費的に最適な車両目標加速度を測定するための測定装置と、
車両実加速度の測定のためのセンサ装置と、
測定された車両目標加速度及び車両実加速度に応じて、走行情報を生成するための装置と、
走行情報を出力するための出力装置と
を備えている。
仮に、例えば差の形成の結果がゼロに等しくない場合には、車両のその時の加速とは異なる加速が有効となる。同じことは、除算の結果が1に等しくない場合にも当てはまる。どのように加速すべきかという指示は、実加速度対目標加速度の比を表わしている結果から直接引き出すことができる。目標加速度B1を実加速度B2で除した際の結果が、例えば1よりも大きい場合には、ドライバーは加速すべきであろうし、結果が1よりも小さい場合には、ドライバーは減速すべきであろう。目標加速度からの実加速度の減算の場合には、マイナスの結果が負の加速度の可能性を、プラスの結果が正の加速度の可能性を指示している。
20 車両
30 測定装置
40 制御装置
50 駆動エンジン
60 データバス
70 センサ装置
80 走行情報生成装置
90 出力装置
100 演算ユニット
110 ドライバー
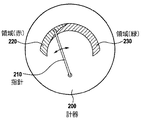
200 計器
210 指針
220 領域(赤)
230 領域(緑)
B1(Soll) 車両目標加速度
B2(Ist) 車両実加速度
Claims (10)
- 車両(20)のドライバーにエネルギー消費的に最適な走行状態を指示する、走行情報(INF)を出力するための方法において、
車両の実際の運転状態パラメータの内の少なくとも一つ(P1)並びに走行抵抗パラメータの内の少なくとも一つ(P2)に応じて燃費的に最適な車両目標加速度(B1)を測定するステップと、
車両実加速度(B2)を測定するステップと、
測定された車両目標加速度(B1)と車両実加速度(B2)とに応じて走行情報INFを生成するステップと、
走行情報(INF)を出力するステップと、
を含むことを特徴とする走行情報を出力するための方法。 - 前記実際の運転状態パラメータの内の少なくとも一つ(P1)が、車速及びエンジン回転数の少なくともいずれかを含んでいる請求項1に記載の方法。
- 前記実際の運転状態パラメータの内の少なくとも一つ(P1)によって、車両の長手方向の加速度、走行レンジ情報、車重、並びに、車両がトレーラー付きで運転されているか否かというデータの内の少なくとも一つが考慮される請求項1または2に記載の方法。
- 前記走行情報(INF)が、ドライバーが、車両実加速度(B2)が燃費的に最適な走行状態の車両目標加速度(B1)よりも小さいか又は大きいか否かということを識別するように出力される請求項1ないし3のいずれかに記載の方法。
- 前記走行情報(INF)が、走行レンジに応じて異なる重み付け係数を用いて重み付け或いは評価される請求項1ないし4のいずれかに記載の方法。
- 前記走行情報(INF)が、車両(20)の中で、視覚的出力、触覚的出力、及び聴覚的出力の少なくともいずれかによって与えられる請求項1ないし5のいずれかに記載の方法。
- 前記方法が、定速運転の中、及び、第一のシフトポイントがクラッチ接続ポイントを意味し且つ第二のシフトポイントがクラッチ遮断ポイントを意味している二つのシフトポイントの間の加速過程の中、の少なくともいずれかで用いられる請求項1ないし6のいずれかに記載の方法。
- 車(20)のドライバーにエネルギー消費的に最適な走行状態を指示する、走行情報(INF)を出力するための装置(10)において、
車の実際の運転状態パラメータ(P1)の内の少なくとも一つ並びに走行抵抗パラメータ(P2)の内の少なくとも一つに応じて燃費的に最適な車両目標加速度(B1)を測定するための測定装置(30)と、
車両実加速度(B2)を測定するためのセンサ装置(70)と、
測定された車両目標加速度(B1)及び車両実加速度(B2)に応じて走行情報(INF)を生成するための装置(80)と、
走行情報(INF)を出力するための出力装置(90)と、
を備えたことを特徴とする走行情報を出力するための装置。 - 請求項8に記載の装置(10)を備えた車両(20)。
- データ処理ユニットで実行された時に、請求項1ないし7のいずれかに記載の方法を実施するコンピュータプログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102008054703A DE102008054703A1 (de) | 2008-12-16 | 2008-12-16 | Verfahren und Vorrichtung zum Ausgeben einer auf eine energieverbrauchsoptimale Beschleunigungsmöglichkeit hinweisenden Fahrinformation in einem Kraftfahrzeug |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010143567A true JP2010143567A (ja) | 2010-07-01 |
Family
ID=42168331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009282377A Pending JP2010143567A (ja) | 2008-12-16 | 2009-12-14 | 走行情報を出力するための方法及び装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9079588B2 (ja) |
| JP (1) | JP2010143567A (ja) |
| DE (1) | DE102008054703A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012210928A (ja) * | 2011-03-23 | 2012-11-01 | Honda Access Corp | 低燃費運転支援装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5585229B2 (ja) * | 2010-06-16 | 2014-09-10 | 富士通株式会社 | 車両の挙動推定装置、プログラム、及び、方法 |
| DE102010049912A1 (de) | 2010-10-28 | 2011-06-30 | Daimler AG, 70327 | Verfahren zur Information eines Fahrzeugführers eines Fahrzeugs |
| US20130143181A1 (en) * | 2011-12-05 | 2013-06-06 | Ford Global Technologies, Llc | In-vehicle training system for teaching fuel economy |
| DE102014014308A1 (de) | 2014-09-25 | 2016-03-31 | Steffen Knöfler | Verfahren zur Bestimmung handlungsleitender Formate des Kraftstoffverbrauchs |
| CN105774595B (zh) * | 2016-03-09 | 2018-06-29 | 广汽本田汽车有限公司 | 电动车辆的节能加速方法和装置 |
| CN113099418B (zh) * | 2021-03-26 | 2022-08-16 | 深圳供电局有限公司 | 一种用于车联网数据传输的区块链任务的优化方法 |
| CN114228720A (zh) * | 2021-12-22 | 2022-03-25 | 阿波罗智联(北京)科技有限公司 | 用于行驶中车辆的节能方法、装置、设备以及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62146735A (ja) * | 1985-12-21 | 1987-06-30 | Toyota Motor Corp | 車両の駆動出力制御装置 |
| JP2005076772A (ja) * | 2003-09-01 | 2005-03-24 | Nissan Motor Co Ltd | 先行車追従走行制御装置 |
| JP2006076415A (ja) * | 2004-09-09 | 2006-03-23 | Nissan Diesel Motor Co Ltd | 省燃費運転評価システム |
| JP2008239130A (ja) * | 2007-03-29 | 2008-10-09 | Denso Corp | 車両の制御装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6092021A (en) * | 1997-12-01 | 2000-07-18 | Freightliner Corporation | Fuel use efficiency system for a vehicle for assisting the driver to improve fuel economy |
| US7024306B2 (en) * | 2003-07-24 | 2006-04-04 | Miyama, Inc. | Evaluation system for vehicle operating conditions and evaluation method thereof |
| US7522990B2 (en) * | 2005-06-08 | 2009-04-21 | General Electric Company | System and method for improved train handling and fuel consumption |
-
2008
- 2008-12-16 DE DE102008054703A patent/DE102008054703A1/de not_active Ceased
-
2009
- 2009-11-11 US US12/616,404 patent/US9079588B2/en not_active Expired - Fee Related
- 2009-12-14 JP JP2009282377A patent/JP2010143567A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62146735A (ja) * | 1985-12-21 | 1987-06-30 | Toyota Motor Corp | 車両の駆動出力制御装置 |
| JP2005076772A (ja) * | 2003-09-01 | 2005-03-24 | Nissan Motor Co Ltd | 先行車追従走行制御装置 |
| JP2006076415A (ja) * | 2004-09-09 | 2006-03-23 | Nissan Diesel Motor Co Ltd | 省燃費運転評価システム |
| JP2008239130A (ja) * | 2007-03-29 | 2008-10-09 | Denso Corp | 車両の制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012210928A (ja) * | 2011-03-23 | 2012-11-01 | Honda Access Corp | 低燃費運転支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9079588B2 (en) | 2015-07-14 |
| US20100152956A1 (en) | 2010-06-17 |
| DE102008054703A1 (de) | 2010-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7294272B2 (ja) | 電気自動車 | |
| JP7468759B2 (ja) | 電気自動車 | |
| US11302209B2 (en) | Vehicle driver feedback system and corresponding method | |
| JP2010143567A (ja) | 走行情報を出力するための方法及び装置 | |
| CN102224362B (zh) | 档位反馈系统 | |
| JP6222194B2 (ja) | 駆動力制御装置 | |
| CN102224528B (zh) | 斜坡反馈装置 | |
| JP2024038489A (ja) | 電気自動車 | |
| EP4574572A1 (en) | Vehicle management system and battery electric vehicle | |
| US10703377B2 (en) | Method and device for determining a measure of brake system usage during operation of a vehicle | |
| EP4552902A1 (en) | Electric vehicle and control system | |
| JP2017039462A (ja) | 車両用表示装置の制御装置 | |
| US7769520B2 (en) | Tractive force map | |
| JPH04272571A (ja) | 自動車シフト変更制御装置 | |
| KR102577788B1 (ko) | 자동차의 바퀴에서의 최소 토크를 계산하기 위한 시스템 및 이러한 계산 시스템을 사용하여 가속기로부터 발을 들어올리는 시점을 결정하기 위한 시스템 | |
| EP4563398A1 (en) | Vehicle management system and battery electric vehicle | |
| EP4600949A1 (en) | Vehicle management system and battery electric vehicle | |
| JP2012012975A (ja) | 省燃費運転評価装置 | |
| KR20250133203A (ko) | 전기 자동차 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140124 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140422 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140425 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140602 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141118 |