JP2010133883A - 液量検出装置 - Google Patents
液量検出装置 Download PDFInfo
- Publication number
- JP2010133883A JP2010133883A JP2008311690A JP2008311690A JP2010133883A JP 2010133883 A JP2010133883 A JP 2010133883A JP 2008311690 A JP2008311690 A JP 2008311690A JP 2008311690 A JP2008311690 A JP 2008311690A JP 2010133883 A JP2010133883 A JP 2010133883A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- liquid
- magnetized
- magnetic sensor
- moving surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000007788 liquid Substances 0.000 title claims abstract description 90
- 230000005291 magnetic effect Effects 0.000 claims abstract description 204
- 238000001514 detection method Methods 0.000 claims abstract description 62
- 230000005415 magnetization Effects 0.000 claims description 33
- 230000007423 decrease Effects 0.000 claims description 16
- 230000000694 effects Effects 0.000 claims description 2
- 239000010410 layer Substances 0.000 description 65
- 238000010586 diagram Methods 0.000 description 15
- 230000005290 antiferromagnetic effect Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 229910003321 CoFe Inorganic materials 0.000 description 2
- 239000011241 protective layer Substances 0.000 description 2
- 239000002356 single layer Substances 0.000 description 2
- 229910019222 CoCrPt Inorganic materials 0.000 description 1
- 229910018979 CoPt Inorganic materials 0.000 description 1
- 229910001030 Iron–nickel alloy Inorganic materials 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000005293 ferrimagnetic effect Effects 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
Images








Landscapes
- Level Indicators Using A Float (AREA)
Abstract
【課題】 特に、小型化且つ簡単な構成で、液体の絶対量の検出精度を向上させることが可能な液量検出装置を提供することを目的としている。
【解決手段】 磁石3は、磁気センサ2が間隔を空けた状態にて移動する移動面3aと、磁気センサ2の移動方向に直交する前記移動面2aの両側に設けられ、夫々異なる磁極に着磁された第1の着磁面4及び第2の着磁面5と、を有する。磁気センサ2が、容器内に貯留された液体31の液面31aの上下移動に連動して移動可能に支持されている。前記磁気センサ2の移動に伴ってGMR素子20,21と移動面3aとの重なり面積が変化するように、前記移動面3aの幅寸法が前記移動方向に向けて変化している。前記移動方向への前記移動面3aの幅寸法変化に容器形状依存性を付与して、前記GMR素子の電気特性変化に基づき前記液体31の絶対量を検知可能とした。
【選択図】図1
【解決手段】 磁石3は、磁気センサ2が間隔を空けた状態にて移動する移動面3aと、磁気センサ2の移動方向に直交する前記移動面2aの両側に設けられ、夫々異なる磁極に着磁された第1の着磁面4及び第2の着磁面5と、を有する。磁気センサ2が、容器内に貯留された液体31の液面31aの上下移動に連動して移動可能に支持されている。前記磁気センサ2の移動に伴ってGMR素子20,21と移動面3aとの重なり面積が変化するように、前記移動面3aの幅寸法が前記移動方向に向けて変化している。前記移動方向への前記移動面3aの幅寸法変化に容器形状依存性を付与して、前記GMR素子の電気特性変化に基づき前記液体31の絶対量を検知可能とした。
【選択図】図1
Description
本発明は、磁界発生部と磁気センサとを備え、容器に貯留された液体の絶対量を検知可能な液量検出装置に関する。
例えば、下記の特許文献1には磁気検出素子を用いた磁気式位置検出装置が開示されている。また特許文献1では、前記磁気式位置検出装置を、異形状タンク内の液体残量を計測する計測システムに適用した例が開示されている。
ところで、特許文献1に記載された発明の磁気式位置検出装置は、前記磁気検出素子の他に磁石円盤や集磁器を備える。
しかしながら特許文献1に記載された発明では、集磁器を備えるために、磁気式位置検出装置の小型化を促進できない。また部品点数が多くなることから製造コストも高くなる。
また特許文献1には集磁器を用いることを必須としない例も開示されているが、その場合には検出精度が低下してしまう(特許文献1の[0044]欄)。
特開2004−184319号公報
そこで本発明は上記従来の課題を解決するためのものであり、特に、小型化且つ簡単な構成で、液体の絶対量の検出精度を向上させることが可能な液量検出装置を提供することを目的としている。
本発明は、磁界発生部と、前記磁界発生部からの外部磁界を受けて電気特性が変動する磁気検出素子を備えた磁気センサとを有する液量検出装置において、
前記磁界発生部は、前記磁気センサが間隔を空けた状態にて相対移動する移動面と、前記磁気センサの相対移動方向に直交する前記移動面の両側に設けられ、夫々異なる磁極に着磁された第1の着磁面及び第2の着磁面と、を有し、
前記磁気センサ及び前記磁界発生部のどちらか一方が、容器内に貯留された液体の液面の上下移動に連動して移動可能に支持されており、
前記磁気センサの相対移動に伴って前記磁気検出素子と前記移動面との重なり面積が変化するように、前記移動面の幅寸法が前記相対移動方向に向けて変化しており、
前記相対移動方向への前記移動面の幅寸法変化に対して容器形状依存性を付与して、前記相対移動に伴う前記磁気検出素子の電気特性変化に基づき前記液体の絶対量を検知可能としたことを特徴とするものである。
前記磁界発生部は、前記磁気センサが間隔を空けた状態にて相対移動する移動面と、前記磁気センサの相対移動方向に直交する前記移動面の両側に設けられ、夫々異なる磁極に着磁された第1の着磁面及び第2の着磁面と、を有し、
前記磁気センサ及び前記磁界発生部のどちらか一方が、容器内に貯留された液体の液面の上下移動に連動して移動可能に支持されており、
前記磁気センサの相対移動に伴って前記磁気検出素子と前記移動面との重なり面積が変化するように、前記移動面の幅寸法が前記相対移動方向に向けて変化しており、
前記相対移動方向への前記移動面の幅寸法変化に対して容器形状依存性を付与して、前記相対移動に伴う前記磁気検出素子の電気特性変化に基づき前記液体の絶対量を検知可能としたことを特徴とするものである。
これにより、小型化且つ簡単な構成で、液体の絶対量の検出精度を向上させることが可能である。
本発明では、前記移動面の幅寸法は、一方の端部から途中位置まで、徐々に拡大し、前記途中位置から他方の端部まで、徐々に縮小するか、あるいは、前記一方の端部から前記途中位置まで、徐々に縮小し、前記途中位置から前記他方の端部まで、徐々に拡大しており、
前記第1の着磁面の前記一方の端部から前記途中位置までの第1領域と、前記途中位置から前記他方の端部までの第2領域とでは、異なる磁極に着磁されており、前記第2の着磁面の前記第1領域は、前記第1の着磁面の前記第1領域と異なる磁極に着磁されているとともに、前記第2の着磁面の前記第2領域が、前記第1の着磁面の前記第2領域と異なる磁極に着磁されており、
前記途中位置は、液体の残量が50%となったときに、前記磁気センサが対向する位置であることが好ましい。
前記第1の着磁面の前記一方の端部から前記途中位置までの第1領域と、前記途中位置から前記他方の端部までの第2領域とでは、異なる磁極に着磁されており、前記第2の着磁面の前記第1領域は、前記第1の着磁面の前記第1領域と異なる磁極に着磁されているとともに、前記第2の着磁面の前記第2領域が、前記第1の着磁面の前記第2領域と異なる磁極に着磁されており、
前記途中位置は、液体の残量が50%となったときに、前記磁気センサが対向する位置であることが好ましい。
これにより出力をより効果的に大きくでき、液体の絶対量の検出精度をより向上させることが可能である。
また本発明では、前記移動面の幅寸法は、一方の端部から他方の端部に至る全域にて、徐々に拡大するか、あるいは縮小しており、前記第1の着磁面の全域がN極あるいはS極に着磁され、前記第2の着磁面の全域が前記一方の着磁面と異なる磁極に着磁されている構成にもできる。
上記により、1極着磁で磁界発生部を形成でき、また液体の絶対量に対するリニア出力を安定して得やすい。
また本発明では、前記磁気センサにフロートが接続されている構成とすることが好適である。
また本発明では、前記磁気検出素子は少なくとも2個設けられ、これら前記磁気検出素子は、前記磁気センサの相対移動に伴って、各磁気検出素子と前記移動面との重なり面積が同じように増大あるいは減少するように、前記移動面の幅方向に間隔を空けて配列されていることが好ましい。
上記により、磁気センサの相対移動に伴って電気特性が変動する複数の磁気検出素子を組み合わせて回路を形成することにより、出力を大きくできる。
また本発明では、前記2個の磁気検出素子が直列接続されており、各磁気検出素子は磁気抵抗効果を利用したGMR素子であり、前記磁気検出素子はミアンダ形状で形成されており、一方の前記磁気検出素子を構成する固定磁性層の固定磁化方向と、他方の前記磁気検出素子を構成する固定磁性層の固定磁化方向は、前記移動面の幅方向であって且つ互いに逆方向に向けられており、また、一方の前記磁気検出素子を構成するフリー磁性層と他方の前記磁気検出素子を構成するフリー磁性層が、共に無磁場状態にて前記相対移動方向と平行な方向に向けられていることが好ましい。上記の構成により、大きな差動出力を得ることが出来る。
本発明の液量検出装置によれば、小型化且つ簡単な構成で、高精度なリニア出力を得ることが出来る。
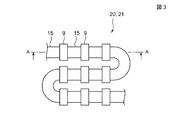
図1(a)は、第1の実施形態における液量検出装置の正面図、(b)は出力変化を示す図、(c)は容器内の液体の変化を示す模式図、である。図2は、図1(a)の一部を拡大して示した部分拡大正面図と磁気センサの回路図である。また図3は図2に示すGMR素子を拡大して示した部分拡大正面図、図4は、図3に示すGMR素子をA−A線に沿って切断し矢印方向から見た部分拡大断面図である。図5は、図2と異なる磁気センサの回路図である。図6、図7は、本実施形態における液量検出装置を具体的に容器内に設置したときの模式図である。
図1に示す液量検出装置1は、磁気センサ2と、磁石3とを有して構成される。なお図1には磁気センサ2が3個図示されているが、実際は1個であり、点線で示した磁気センサ2は、図示上側(Z1側)にある実線で示した磁気センサ2が下方向に移動した状態を示すものである。
この実施形態では、磁気センサ2が上下方向(Z1−Z2方向)に平行に移動可能に支持されている。
磁石3には、前記磁気センサ2と対向する移動面3aが設けられる。前記移動面3aは平面で形成される。前記磁気センサ2は前記移動面3aから所定距離離れた状態で対向している。
図1(a)に示すように移動面3aの紙面左右方向(X1−X2方向)の両側は着磁面4,5である。
図1(a)に示すように移動面3aの幅寸法は、上端6から下方向(Z2方向)への途中位置8まで徐々に減少し、前記途中位置8から下端7まで徐々に拡大している。上端6及び下端7での幅寸法は同じ大きさである。
また、第1の着磁面4のZ1−Z2方向(磁気センサ2の移動方向)に対する傾き角度θ1と、第2の着磁面5のZ1−Z2方向(磁気センサの移動方向)に対する傾き角度θ2とがほぼ同じになっている(図2参照)。
図1(a)に示すように、第1の着磁面4では、上端6から途中位置8までの第1領域4aがN極に着磁され、途中位置8からから下端7までの第2領域4bがS極に着磁されている。
一方、第2の着磁部5では、上端6から下方向(Z2方向)への途中位置8までの第1領域5aがS極に着磁され、途中位置8から下端7までの第2領域5bがN極に着磁されている。
したがって、図1の実施形態の磁石3は、2極着磁で形成される。なお、図1(a)の形態と異なって、前記移動面3aの幅寸法が、上端6から途中位置8にかけて徐々に増大し、前記途中位置8から下端7にかけて徐々に減少していく形態であってもよい。係る場合の着磁は図1(a)と同様である。
図1(a)に示す矢印方向は外部磁界Hの方向を示している。外部磁界Hは、上端6から途中位置8まではX2方向を向いているが、途中位置8から下端7まではX1方向を向いている。すなわち外部磁界Hの方向は、上端6から下端7に至る途中位置8を境にして反転する。
図1(a)、図2に示すように、磁気センサ2は第1のGMR素子20及び第2のGMR素子21を備える。第1のGMR素子20及び第2のGMR素子21は共に図2に示すようにミアンダ形状で形成される。さらに拡大して示した図3(図2のミアンダ形状を90°反転させている)に示すようにGMR素子20,21は、複数の素子部15と各素子部15間に介在するハードバイアス層9とでミアンダ形状に形成されている。なお図3では一部の素子部15及びハードバイアス層9にのみ符号を付した。
図4は各GMR素子20,21の断面形状を示す。素子部15は、下から反強磁性層10、固定磁性層11、非磁性材料層12、フリー磁性層13及び保護層14の順で積層された積層体で形成される。反強磁性層10と固定磁性層11との間には交換結合磁界(Hex)が生じて前記固定磁性層11の磁化は一方向に固定されている。図2に示すように、第1のGMR素子20を構成する固定磁性層11の固定磁化方向(PIN1)、及び第2のGMR素子21を構成する固定磁性層11の固定磁化方向(PIN2)は、共に移動方向(Z1−Z2方向)に対して直交する方向(X1−X2方向)であって且つ互いに逆方向を向いている。この実施形態では、第1のGMR素子20を構成する固定磁性層11の固定磁化方向(PIN1)は、X2方向を、第2のGMR素子21を構成する固定磁性層11の固定磁化方向(PIN2)は、X1方向である。
固定磁性層11は図4に示す単層構造よりも第1固定磁性層と第2固定磁性層が非磁性中間層を介して積層された積層フェリ構造であることが好ましい。またフリー磁性層13は、図4に示す単層構造よりも磁性層の積層構造としたほうが好適である。例えば前記反強磁性層10はIrMnで形成され、前記第1固定磁性層および第2固定磁性層はCoFeで、非磁性中間層はRuで形成され、前記非磁性材料層12はCuで形成され、前記フリー磁性層13はCoFeとNiFeの積層で形成され、前記保護層14はTaで形成される。
図4に示すように各素子部15の間に介在するハードバイアス層9は、フリー磁性層13に対してバイアス磁界を供給する。例えば、ハードバイアス層9はCoPtやCoCrPtで形成される。前記バイアス磁界の供給により無磁場状態(外部磁界が作用していない状態)では、フリー磁性層13の磁化方向は図2のZ方向に揃えられる。すなわち無磁場状態では、固定磁性層11の固定磁化方向とフリー磁性層13の磁化方向とが直交関係にある。
図4の点線で示す位置がハードバイアス層9の底面となるように形成してもよい。かかる場合、前記ハードバイアス層9の下側には固定磁性層11や反強磁性層10が存在することになる。
図1(a)に示す実施形態では、GMR素子20,21と移動面3aとの平面視での重なり面積は、磁気センサ2が上端6及び下端7と対向した位置関係にあるときに最も大きく(ほぼ重なっており)、磁気センサ2が途中位置8と対向した位置関係にあるとき最も小さくなっている(ほぼゼロになっている)。なお、「上端6と対向した位置関係」とは、例えば、図1(a)に示すように、磁気センサ2と磁石3とが重なる方向からの矢視にて、各GMR素子20,21の上側端部と、上端6とが一直線上となる位置にあるときを指し、「下端7と対向した位置関係」とは、GMR素子20,21の下側端部と、下端7とが一直線上となる位置にあるときを指す。また、「途中位置8と対向した位置関係」とは、GMR素子20,21の中心と、途中位置8とが一直線上となる位置にあるときを指す。
図2を用いてGMR素子20,21の電気抵抗値を説明する。
図2の状態では、各GMR素子20,21の一部の素子領域に、X2方向に向けて外部磁界Hが流入する。そして外部磁界Hが作用する前記素子領域でのフリー磁性層13が外部磁界Hの方向を向くと、第1のGMR素子20では、固定磁性層11の固定磁化方向(PIN1)とフリー磁性層13の磁化方向とが同じになるので前記素子領域での電気抵抗値は低くなる。したがって図2に示す第1のGMR素子20は全体として電気抵抗値が中間値(固定磁性層とフリー磁性層の磁化が直交したときの電気抵抗値)より低い状態にある。一方、第2のGMR素子21では、固定磁性層11の固定磁化方向(PIN2)とフリー磁性層13の磁化方向とが反対方向になるので前記素子領域での電気抵抗値は高くなる。したがって図2に示す第2のGMR素子21は全体として電気抵抗値が中間値より高い状態にある。
図2の状態では、各GMR素子20,21の一部の素子領域に、X2方向に向けて外部磁界Hが流入する。そして外部磁界Hが作用する前記素子領域でのフリー磁性層13が外部磁界Hの方向を向くと、第1のGMR素子20では、固定磁性層11の固定磁化方向(PIN1)とフリー磁性層13の磁化方向とが同じになるので前記素子領域での電気抵抗値は低くなる。したがって図2に示す第1のGMR素子20は全体として電気抵抗値が中間値(固定磁性層とフリー磁性層の磁化が直交したときの電気抵抗値)より低い状態にある。一方、第2のGMR素子21では、固定磁性層11の固定磁化方向(PIN2)とフリー磁性層13の磁化方向とが反対方向になるので前記素子領域での電気抵抗値は高くなる。したがって図2に示す第2のGMR素子21は全体として電気抵抗値が中間値より高い状態にある。
磁気センサ2が図1(a)に示す上端6と対向した位置にあると、第1のGMR素子20の電気抵抗値は最も低い状態にあり、第2のGMR素子21の電気抵抗値は最も高い状態にある。磁気センサ2が上端6から下方向に移動すると、その移動に伴い移動面3aの幅寸法が小さくなっていくから、各GMR素子20,21と移動面3aとの重なり面積も徐々に小さくなっていく。図1(a)に示すように、この実施形態では、途中位置8の位置で、各GMR素子20,21と移動面3aとの重なり面積がほぼ0となっている。上記のように重なり面積が減少すれば、各GMR素子20,21に対する外部磁界Hが作用する素子領域が減るので、GMR素子20,21の固定磁性層11の固定磁化方向(PIN2)とフリー磁性層13の磁化方向とが直交した状態である無磁場状態と同様の素子領域が増えていく。その結果、第1のGMR素子20の電気抵抗値は、上端6から途中位置8に向けて徐々に大きくなって中間値に近づき、一方、第2のGMR素子21の電気抵抗値は、上端6から途中位置8に向けて徐々に小さくなって中間値に近づく。
さらに、磁気センサ2が途中位置8から下方向に移動すると、その移動に伴い移動面3aの幅寸法が大きくなっていくから、各GMR素子20,21と移動面3aとの重なり面積も徐々に大きくなっていく。しかも、上端6から途中位置8までの第1領域に対して、途中位置8から下端7までの第2領域に作用する外部磁界Hは反転する(X1方向に作用する)。上記のように重なり面積が増加し、しかも外部磁界HがX1方向に作用することで、第1のGMR素子20では、フリー磁性層13の磁化方向が固定磁性層11の固定磁化方向(PIN1)と反対方向となる素子領域が増えて、電気抵抗値は中間値よりも徐々に大きくなっていく。一方、第2のGMR素子21では、フリー磁性層13の磁化方向が固定磁性層11の固定磁化方向(PIN1)と同方向となる素子領域が増えて、電気抵抗値は中間値よりも徐々に小さくなっていく。
そして、図2に示すように第1のGMR素子20と第2のGMR素子21とを出力端子を介して直列に接続することで、大きな差動出力を得ることが出来る。なお、例えば、さらに2個のGMR素子を絶縁層を介して積層して、図5(a)に示すブリッジ回路を構成することも可能である。また図2に示す実施形態では、第1のGMR素子20及び第2のGMR素子21の固定磁性層11の固定磁化方向(PIN)は反対方向であったが、同じ方向にして、図5(b)に示すように2個のGMR素子20(あるいはGMR素子21)と2個の固定抵抗50と組み合わせたブリッジ回路を構成することも出来る。
外部磁界Hが流入するGMR素子20,21の素子領域は、前記GMR素子20,21と移動面3a間の距離にも関係する。例えば、GMR素子20,21があまり移動面3aに近づきすぎると、途中位置8での対向状態のように、GMR素子20,21と移動面3aとの重なり面積が小さくあるいはゼロであっても、移動面3aの幅よりも外側に広がる外部磁界が入り込みやすいため、電気抵抗値のリニアな変動を得にくいか、あるいは上端6から途中位置8、さらに途中位置8から下端7に至る電気抵抗変化が非常に小さくなってしまう。したがって、GMR素子20,21と移動面3a間の距離を適正化して、移動面3aの外側へ作用する外部磁界Hをあまり拾わないように調整することが好適である。
本実施形態における液量検出装置1は、図1(c)に示すように容器30に貯留された液体31の絶対量を検出するためのものである。
この実施形態では、図1(a)に示す磁気センサ2が前記液体31の液面31aの上下移動に連動して移動可能に支持されている。そして、図1(c)に示すように、液体31が容器30内に満タンに貯留されていると、図1(a)に示す磁気センサ2は上端6と対向した位置関係にあり、図1(b)に示すように最も出力が大きい状態にある。
図1(c)に示すように、容器30に貯留された液体31の液量が減少し、液面31aが低下すると、それに伴って磁気センサ2も下方向に移動し、また図1(b)に示すように出力も低下していく。図1(c)の真ん中の図は、ちょうど、液体31の残量が50%の状態を示している。このとき図1(a)に示すように磁気センサ2は磁石3の途中位置8に対向する。
また、図1(b)の真ん中の図に示すように、磁気センサ2が途中位置8に到達すると出力はちょうど半分となる。
さらに、容器30に貯留された液体31の液量が減少して、液面31aが低下すると、それに伴って磁気センサ2も下方向に移動し、また図1(b)に示すように出力も低下していく。
図1(c)の下図は、容器30から液体31が無くなった(空となった)図であり、このとき、磁気センサ2は、磁石3の下端7と対向する位置まで下がる。そして図1(b)の下図に示すように出力が最も小さくなる。
本実施形態では、前記磁気センサ2の移動に伴うGMR素子20,21の電気抵抗変化に基づいて液体31の絶対量を検知可能とすべく、磁気センサ2の移動方向(Z1−Z2方向)における移動面3aの幅寸法変化に対して容器形状依存性を付与している。
具体的には、液面31aの単位移動量に対する液体31の変化量(微分値)を解析し、前記移動面3aの幅寸法変化を算出している。
例えば、図1(c)での容器30は上部30aと下部30bとが異形となっている。そして、容器30の上部30aでは容器30の幅寸法(面積)が一定であるため、液面31aが上部30a内に位置しているとき、液面31aの単位移動量に対する液体31の変化量はほぼ一定である。一方、液面31aが容器30の下部30bに達すると、前記下部30bの幅寸法(面積)が下方に向けて徐々に小さくなるため、液面31aの単位移動量に対する液体31の変化量は変動する。
よって、液面31aが容器30の上部30aに位置しているときは、移動面3aの幅寸法の変化率(磁気センサ2の単位移動量に対する幅寸法の変化量)をほぼ一定にし、液面31bが容器30の下部30bに位置しているときは、移動面3aの幅寸法の変化率を変動させる。具体的には、液面31bが容器30の下部30bに位置し下方に移動するほど、移動面3aの幅寸法の変化率を徐々に小さくしていく。
本実施形態では、上記したように、磁気センサ2の移動方向への移動面3aの幅寸法を容器形状を考慮して変化させた(容器形状依存性を付与した)ことで、図1(b)に示すように、液体31の残量に対してリニア出力を得ることが出来る。したがって、液体31の絶対量を検知することが出来る。
液量の検出精度を向上させるには、液体31の残量に対するリニア出力とともに出力自体を大きくすることが好適である。
その点、図1の実施形態は、後述の図8の形態に比べて出力を大きくすることが可能である。具体的には図8の形態に対して約倍の出力を得ることが出来る。
図1の実施形態では2極着磁の構成とし、外部磁界Hの方向が切り替わる途中位置8を、液体31の残量が50%となったときに、ちょうど磁気センサ2が対向する位置としている。
さらに図1の実施形態では、2個のGMR素子20,21を用意し、第1のGMR素子20を一方の着磁面5に近い側を移動させ、第2のGMR素子21を他方の着磁面4に近い側を移動させている。
上記のような構成とすることで、磁気センサ2が移動面3aの上端6から下端7へ移動したときに、GMR素子20,21の電気抵抗は、最小値(固定磁性層とフリー磁性層の磁化方向が同じ状態での電気抵抗値)と最大置(固定磁性層とフリー磁性層の磁化方向が反対方向での電気抵抗値)の間の広いレンジで変化するため、大きな差動出力を得ることができる。よって図1の実施形態では、より効果的に、液体31の絶対量の検知精度を向上させることが可能である。
図6、図7は、本実施形態の液量検出装置1の設置状態を示す一例である。図6では、磁気センサ2にフロート40を連結部41を介して連結させている。この実施形態では、液量検出装置1の大きさは容器42内部の高さ寸法H1より十分に小さい。フロート40は液体43の液面43aに浮かんでいる。フロート40は液体43を容器42内に満タンに貯留した状態から液体43が空の状態まで随時、液面43aに浮かんだ状態を維持するように連結部41の長さ等が規制されている。
一方、フロート40に連結された磁気センサ2は、フロート40の上下方向への移動量に対して、相似縮小した移動量で移動する。なお、図6の実施形態では、磁石3側をフロート40と連結し、磁気センサ2を固定してもよい。ただし、磁気センサ2を移動させたほうが液量検出装置1の小型化を実現でき好適である。
図7の形態では、液量検出装置1は、容器42の天井面から底面まで形成されている。図7での磁気センサ2はフロート付き磁気センサである。よって液面43aと同位置に常に磁気センサ2が存在している。なお図7の形態では、磁気センサ2を移動側とし磁石3を固定側にすることが必要である。
図6、図7に示す実施形態では、図1で説明した容器30と同様に上部と下部とが異形となっている。そのため、液量検出装置1を構成する磁石3の移動面3aの幅寸法変化に容器形状依存性を付与し、GMR素子の電気抵抗変化に基づいて液体43の絶対量を検知可能としている。
図8(a)(b)に示す形態は図1と異なる磁石形状を示している。図8(a)では、移動面3aの幅寸法は、上端6から下端7に向かう全域にて、徐々に縮小している。そして着磁面4の全域がN極に、着磁面5の全域がS極に着磁されている。よって磁石3の形成を1極着磁で対応でき、簡単な構成にできる。
図8(b)の構成では、一方の着磁面4が磁気センサ36の移動方向である上下方向(Z1−Z2方向)に向けて平行に形成されている。もう一方の着磁面5は、前記移動方向に対して斜めに傾いており、前記移動面3aの幅寸法が、上端6から下端7に向けて徐々に縮小している。
この実施形態では、磁気センサ36には1個のGMR素子37が設けられている。このGMR素子37は、図2に示すGMR素子20,21に比べて大きく形成されているが、平面構造や積層構造は図3,図4と同じである。
図6の実施形態では、一方の着磁面4が移動方向(Z方向)に平行なため、着磁面4側を移動するGMR素子の移動面3aとの重なり面積は、漸次的に変化しない。
したがって、例えば図2のように2個のGMR素子20,21を用いても、第2のGMR素子21の電気抵抗値はほとんど変化しない。よって、図6の実施形態では、1個のミアンダ形状のGMR素子37を用い、このGMR素子37のX1−X2方向への長さを、移動面3aの最大幅寸法とほぼ同等に形成した。
例えば、図6に示すGMR素子37の固定磁化方向(PIN)が、X2方向である場合、磁気センサ36が上端6から下端7まで移動すると、外部磁界Hの変化により、GMR素子37の電気抵抗値が徐々に大きくなり中間値(固定磁性層とフリー磁性層の磁化が直交したときの電気抵抗値)に近づく。
また、図6の実施形態では、1個のGMR素子37を用いていたが、さらに1個のGMR素子を絶縁層を介して積層して、図2の回路(係る場合、2個のGMR素子の固定磁性層の固定磁化方向を反平行に調整する)や図5(b)の回路構成を形成してもよい。
図8に示した形態は、図1(a)に示した実施形態より出力が小さくなるものの、図1と同様に移動面の幅寸法変化に容器形状依存性を付与することで、液体の残量に対してリニア特性を安定して得ることができ、液体の絶対量を検出することが可能である。
本実施形態の液量検出装置を用いることで、自動車の燃料タンクに代表される不均一な外形をした容器に貯留された液体の絶対量を管理できる。よって、本実施形態の液量検出装置を用いることで、例えば、図9に示すように、燃料の表示部に、目盛り式表示部60とともに残燃料の数値表示部61の追加を、複雑なシステムを必要とせず、簡単に行うことが可能である。
上記した磁気センサを構成する磁気検出素子はいずれもGMR素子であったが、GMR素子に限定されるものではない。例えばTMR素子、AMR素子、ホール素子を提示できる。ただしミアンダ形状で形成し且つ大きな出力を得るにはGMR素子を用いることが好適である。
1 液量検出装置
2、36 磁気センサ
3 磁石
3a 移動面
4、5 着磁面
6 上端
7 下端
8 途中位置
9 ハードバイアス層
10 反強磁性層
11 固定磁性層
12 非磁性材料層
13 フリー磁性層
20、21、37 GMR素子
30、42 容器
31、43 液体
31a、43a 液面
40 フロート
60 目盛り式表示部
61 数値表示部
2、36 磁気センサ
3 磁石
3a 移動面
4、5 着磁面
6 上端
7 下端
8 途中位置
9 ハードバイアス層
10 反強磁性層
11 固定磁性層
12 非磁性材料層
13 フリー磁性層
20、21、37 GMR素子
30、42 容器
31、43 液体
31a、43a 液面
40 フロート
60 目盛り式表示部
61 数値表示部
Claims (6)
- 磁界発生部と、前記磁界発生部からの外部磁界を受けて電気特性が変動する磁気検出素子を備えた磁気センサとを有する液量検出装置において、
前記磁界発生部は、前記磁気センサが間隔を空けた状態にて相対移動する移動面と、前記磁気センサの相対移動方向に直交する前記移動面の両側に設けられ、夫々異なる磁極に着磁された第1の着磁面及び第2の着磁面と、を有し、
前記磁気センサ及び前記磁界発生部のどちらか一方が、容器内に貯留された液体の液面の上下移動に連動して移動可能に支持されており、
前記磁気センサの相対移動に伴って前記磁気検出素子と前記移動面との重なり面積が変化するように、前記移動面の幅寸法が前記相対移動方向に向けて変化しており、
前記相対移動方向への前記移動面の幅寸法変化に対して容器形状依存性を付与して、前記相対移動に伴う前記磁気検出素子の電気特性変化に基づき前記液体の絶対量を検知可能としたことを特徴とする液量検出装置。 - 前記移動面の幅寸法は、一方の端部から途中位置まで、徐々に拡大し、前記途中位置から他方の端部まで、徐々に縮小するか、あるいは、前記一方の端部から前記途中位置まで、徐々に縮小し、前記途中位置から前記他方の端部まで、徐々に拡大しており、
前記第1の着磁面の前記一方の端部から前記途中位置までの第1領域と、前記途中位置から前記他方の端部までの第2領域とでは、異なる磁極に着磁されており、前記第2の着磁面の前記第1領域は、前記第1の着磁面の前記第1領域と異なる磁極に着磁されているとともに、前記第2の着磁面の前記第2領域が、前記第1の着磁面の前記第2領域と異なる磁極に着磁されており、
前記途中位置は、液体の残量が50%となったときに、前記磁気センサが対向する位置である請求項1記載の液量検出装置。 - 前記移動面の幅寸法は、一方の端部から他方の端部に至る全域にて、徐々に拡大するか、あるいは縮小しており、前記第1の着磁面の全域がN極あるいはS極に着磁され、前記第2の着磁面の全域が前記一方の着磁面と異なる磁極に着磁されている請求項1記載の液量検出装置。
- 前記磁気センサにフロートが接続されている請求項1ないし3のいずれかに記載の液量検出装置。
- 前記磁気検出素子は少なくとも2個設けられ、これら前記磁気検出素子は、前記磁気センサの相対移動に伴って、各磁気検出素子と前記移動面との重なり面積が同じように増大あるいは減少するように、前記移動面の幅方向に間隔を空けて配列されている請求項1ないし4のいずれかに記載の液量検出装置。
- 前記2個の磁気検出素子が直列接続されており、各磁気検出素子は磁気抵抗効果を利用したGMR素子であり、前記磁気検出素子はミアンダ形状で形成されており、一方の前記磁気検出素子を構成する固定磁性層の固定磁化方向と、他方の前記磁気検出素子を構成する固定磁性層の固定磁化方向は、前記移動面の幅方向であって且つ互いに逆方向に向けられており、また、一方の前記磁気検出素子を構成するフリー磁性層と他方の前記磁気検出素子を構成するフリー磁性層が、共に無磁場状態にて前記相対移動方向と平行な方向に向けられている請求項5記載の液量検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008311690A JP2010133883A (ja) | 2008-12-08 | 2008-12-08 | 液量検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008311690A JP2010133883A (ja) | 2008-12-08 | 2008-12-08 | 液量検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010133883A true JP2010133883A (ja) | 2010-06-17 |
Family
ID=42345313
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008311690A Withdrawn JP2010133883A (ja) | 2008-12-08 | 2008-12-08 | 液量検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010133883A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017145969A (ja) * | 2016-02-15 | 2017-08-24 | 株式会社コロナ | 空気調和機 |
-
2008
- 2008-12-08 JP JP2008311690A patent/JP2010133883A/ja not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017145969A (ja) * | 2016-02-15 | 2017-08-24 | 株式会社コロナ | 空気調和機 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10989769B2 (en) | Magneto-resistive structured device having spontaneously generated in-plane closed flux magnetization pattern | |
| CN202083786U (zh) | 薄膜磁电阻传感元件、多个传感元件的组合及与该组合耦合的电子装置 | |
| JP5297539B2 (ja) | 磁気センサ | |
| US9207290B2 (en) | Magnetic field sensor for sensing external magnetic field | |
| US9810748B2 (en) | Tunneling magneto-resistor device for sensing a magnetic field | |
| CN107533114A (zh) | 具有增加的场范围的磁场传感器 | |
| JP2016529492A (ja) | 多成分磁場センサー | |
| JP5899012B2 (ja) | 磁気センサ | |
| KR20160005733A (ko) | 자계 센서 장치 | |
| US10877109B2 (en) | Magnetic field detection device | |
| WO2011074488A1 (ja) | 磁気センサ | |
| CN102790613B (zh) | 一种开关传感器 | |
| JP4870226B2 (ja) | 位置検出装置 | |
| JP2010133883A (ja) | 液量検出装置 | |
| JP6007479B2 (ja) | 電流センサ | |
| JP4874781B2 (ja) | 磁気センサ及びそれを用いた磁気エンコーダ | |
| JP2013142569A (ja) | 電流センサ | |
| JP2019052891A (ja) | 磁気センサ | |
| US20150153426A1 (en) | Magnetic field sensing device and method | |
| JP2008192439A (ja) | 縦横検知センサ | |
| JP6285641B2 (ja) | 磁気センサ及び磁場成分演算方法 | |
| WO2008053926A1 (fr) | Capteur de mouvement | |
| JP2010133882A (ja) | 絶対位置検出装置 | |
| JPWO2008139930A1 (ja) | 磁気抵抗効果素子を用いた位置検知装置 | |
| JP2008170273A (ja) | 磁気抵抗効果素子を用いた位置検知装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20120306 |