JP2010097561A - 車両周辺監視装置 - Google Patents
車両周辺監視装置 Download PDFInfo
- Publication number
- JP2010097561A JP2010097561A JP2008269951A JP2008269951A JP2010097561A JP 2010097561 A JP2010097561 A JP 2010097561A JP 2008269951 A JP2008269951 A JP 2008269951A JP 2008269951 A JP2008269951 A JP 2008269951A JP 2010097561 A JP2010097561 A JP 2010097561A
- Authority
- JP
- Japan
- Prior art keywords
- parallax
- vehicle
- distance
- calculating
- calculated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
- G01C3/08—Use of electric radiation detectors
- G01C3/085—Use of electric radiation detectors with electronic parallax measurement
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
- G06T2207/10021—Stereoscopic video; Stereoscopic image sequence
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Abstract
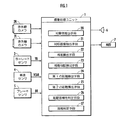
【解決手段】所定時点で前記第1の撮像手段により撮像された第1画像から、実空間上の対象物の第1画像部分を抽出し、該所定時点で前記第2の撮像手段により撮像された第2画像から、該第1画像部分と相関性を有する第2画像部分を抽出して、該第1画像部分と該第2画像部分との視差を算出する視差算出手段22と、実空間上の同一の対象物について、視差算出手段22により時系列的に視差を算出して、視差勾配を算出する視差勾配算出手段23と、車両の速度を検出する速度センサ4と、視差勾配と車両の速度とに基づいて、車両から対象物までの距離を算出する第1の距離算出手段24とを備える。
【選択図】 図1
Description
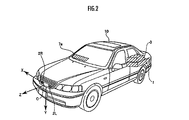
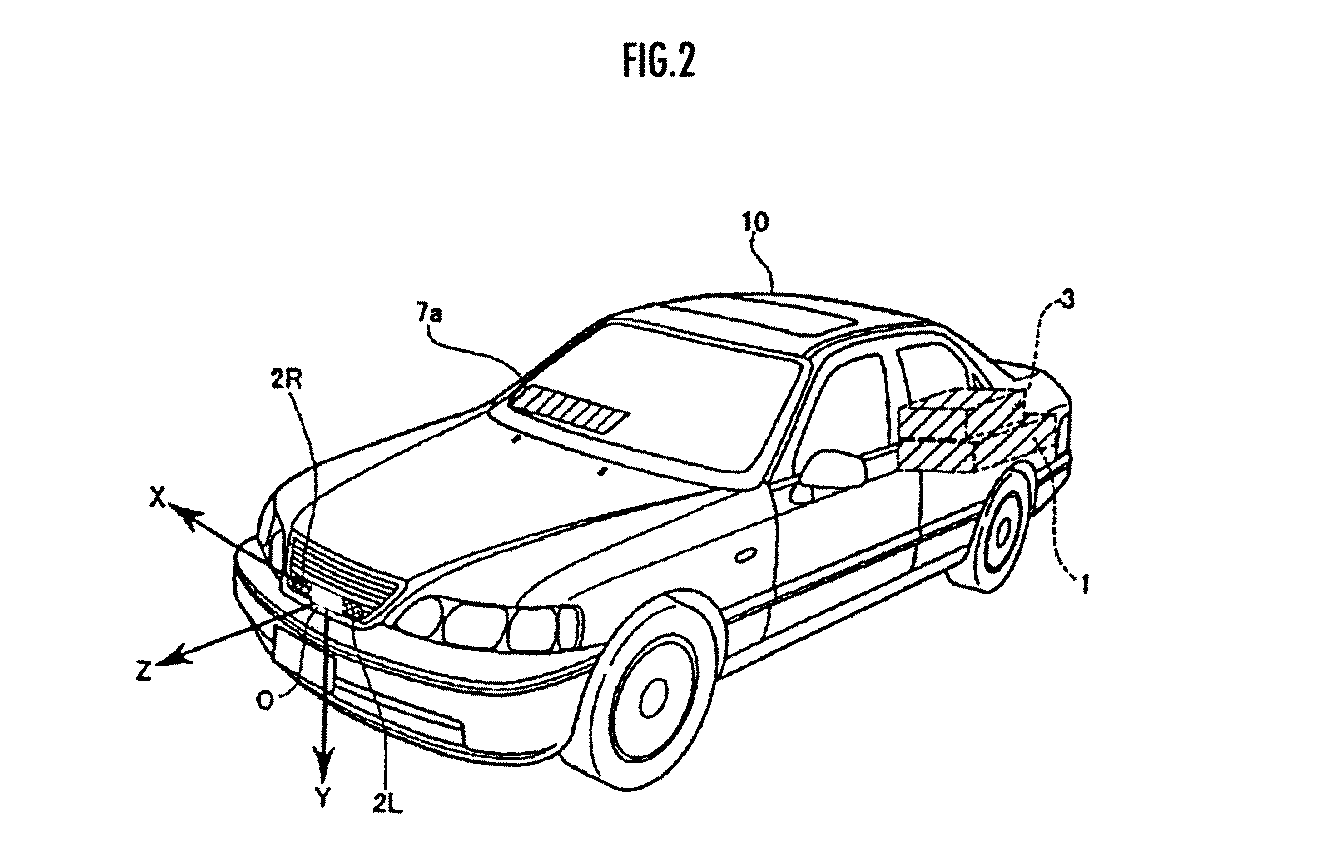
本発明は、車両に搭載された撮像手段により撮像された画像に基づいて、前記車両の周辺を監視する車両周辺監視装置に関する。
Claims (5)
- 車両に搭載されて重複した撮像範囲を有する第1の撮像手段及び第2の撮像手段により撮像された画像に基づいて、該車両の周辺を監視する車両周辺監視装置であって、
所定時点で前記第1の撮像手段により撮像された第1画像から、実空間上の対象物の第1画像部分を抽出する対象物抽出手段と、
前記所定時点で前記第2の撮像手段により撮像された第2画像から、該第1画像部分と相関性を有する第2画像部分を抽出する対応画像抽出手段と、
前記第1画像部分と前記第2画像部分との視差を算出する視差算出手段と、
前記対象物について、前記視差算出手段により時系列的に前記視差を算出して、所定時間あたりの視差変化率を算出する視差変化率算出手段と、
前記車両の速度を検出する速度検出手段と、
前記視差変化率と前記車両の速度とに基づいて、前記車両と前記対象物間の距離を算出する算出する第1の距離算出手段とを備えたことを特徴とする車両周辺監視装置。 - 請求項1記載の車両周辺監視装置において、
前記第1の距離算出手段は、前記第1の撮像手段と前記第2の撮像手段の前記車両への搭載態様が予め規定された条件を満たしており、前記車両が前記速度検出手段により検出される速度で走行しているときを想定して算出した、該速度における理論的な視差の時系列データから、サンプリング期間をずらして理論的な視差変化率を算出し、該理論的な視差変化率と前記視差変化率算出手段により算出された視差変化率とが一致するときのサンプリング期間における前記理論的な視差の時系列データに基いて、前記車両と前記対象物間の距離を算出することを特徴とする車両周辺監視装置。 - 請求項1又は請求項2記載の車両周辺監視装置において、
前記視差算出手段により算出された1つの視差に基づいて、前記車両と該視差を算出した前記第1画像部分に対応する実空間上の対象物との距離を算出する第2の距離算出手段と、
実空間上の同一の対象物について、前記第1の距離算出手段により算出された前記車両との距離と、前記第2の距離算出手段により算出された前記車両との距離との差が、第1の所定値以上となったときに、前記第1の距離算出手段により算出された前記車両との距離に基づく対象物の監視処理を禁止する距離信頼性判定手段とを備えたことを特徴とする車両周辺監視装置。 - 請求項1又は請求項2記載の車両周辺監視装置において、
前記第1の距離算出手段により算出された距離から、前記第1画像部分と前記第2画像部分の推定視差を算出する推定視差算出手段と、
前記視差算出手段により算出された前記視差と、前記推定視差との差が、第2の所定値以上となったときに、前記第1の距離算出手段により算出された前記車両との距離に基づく対象物の監視処理を禁止する距離信頼性判定手段とを備えたことを特徴とする車両周辺監視装置。 - 請求項1から請求項4のうちいずれか1項記載の車両周辺監視装置において、
前記第1の距離算出手段は、前記車両の速度が所定速度以上であるときにのみ、前記視差変化率と前記車両の速度とに基づいて、前記車両と前記対象物間の距離を算出することを特徴とする車両周辺監視装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008269951A JP4631096B2 (ja) | 2008-10-20 | 2008-10-20 | 車両周辺監視装置 |
| CN200980141577.1A CN102187367B (zh) | 2008-10-20 | 2009-07-10 | 车辆周围监测装置 |
| US13/119,324 US8139821B2 (en) | 2008-10-20 | 2009-07-10 | Vehicle periphery monitoring device |
| EP09821716A EP2323098A4 (en) | 2008-10-20 | 2009-07-10 | DEVICE FOR MONITORING THE VEHICLE ENVIRONMENT |
| PCT/JP2009/003245 WO2010047015A1 (ja) | 2008-10-20 | 2009-07-10 | 車両周辺監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008269951A JP4631096B2 (ja) | 2008-10-20 | 2008-10-20 | 車両周辺監視装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010097561A true JP2010097561A (ja) | 2010-04-30 |
| JP4631096B2 JP4631096B2 (ja) | 2011-02-16 |
Family
ID=42119073
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008269951A Active JP4631096B2 (ja) | 2008-10-20 | 2008-10-20 | 車両周辺監視装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8139821B2 (ja) |
| EP (1) | EP2323098A4 (ja) |
| JP (1) | JP4631096B2 (ja) |
| CN (1) | CN102187367B (ja) |
| WO (1) | WO2010047015A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013224919A (ja) * | 2012-03-21 | 2013-10-31 | Ricoh Co Ltd | 校正装置、距離計測装置及び車両 |
| WO2014061446A1 (ja) * | 2012-10-19 | 2014-04-24 | 日立オートモティブシステムズ株式会社 | ステレオ画像処理装置及びステレオ画像処理方法 |
| JP2017049146A (ja) * | 2015-09-02 | 2017-03-09 | 富士重工業株式会社 | 画像処理装置 |
| JP2017198710A (ja) * | 2012-03-21 | 2017-11-02 | 株式会社リコー | 校正装置、距離計測装置及び車両 |
| KR102001339B1 (ko) * | 2018-01-26 | 2019-07-17 | 숭실대학교산학협력단 | 두 대의 카메라와 한 개의 led를 사용하는 차량 대 차량 거리 추정 방법 및 그 장치 |
| KR20190091174A (ko) * | 2018-01-26 | 2019-08-05 | 숭실대학교산학협력단 | 저해상도 카메라를 위한 보정 기법을 이용한 차량 간 거리 추정 방법 및 그 장치 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103797528A (zh) * | 2011-09-28 | 2014-05-14 | 本田技研工业株式会社 | 生物体识别装置 |
| JP5612621B2 (ja) * | 2012-02-28 | 2014-10-22 | 富士重工業株式会社 | 車外環境認識装置 |
| JP5774770B2 (ja) * | 2012-03-12 | 2015-09-09 | 本田技研工業株式会社 | 車両周辺監視装置 |
| CN103568990A (zh) * | 2012-07-23 | 2014-02-12 | 北京新岸线移动多媒体技术有限公司 | 一种实现车辆安全预警的方法和系统 |
| WO2014076769A1 (ja) * | 2012-11-13 | 2014-05-22 | 株式会社東芝 | 検出装置、方法及びプログラム |
| JP6151150B2 (ja) * | 2013-10-07 | 2017-06-21 | 日立オートモティブシステムズ株式会社 | 物体検出装置及びそれを用いた車両 |
| JP6299651B2 (ja) * | 2015-04-02 | 2018-03-28 | 株式会社デンソー | 画像処理装置 |
| JP2016206774A (ja) * | 2015-04-17 | 2016-12-08 | トヨタ自動車株式会社 | 立体物検出装置及び立体物検出方法 |
| US10906530B2 (en) | 2015-11-10 | 2021-02-02 | Hyundai Motor Company | Automatic parking system and automatic parking method |
| KR101892026B1 (ko) * | 2015-11-10 | 2018-08-27 | 현대자동차주식회사 | 차량의 원격 주차 제어 방법 및 장치 |
| US10919574B2 (en) | 2015-11-10 | 2021-02-16 | Hyundai Motor Company | Automatic parking system and automatic parking method |
| US10606257B2 (en) | 2015-11-10 | 2020-03-31 | Hyundai Motor Company | Automatic parking system and automatic parking method |
| US10796425B1 (en) * | 2016-09-06 | 2020-10-06 | Amazon Technologies, Inc. | Imagery-based member deformation gauge |
| JP6920159B2 (ja) * | 2017-09-29 | 2021-08-18 | 株式会社デンソー | 車両の周辺監視装置と周辺監視方法 |
| JP7134780B2 (ja) * | 2018-08-13 | 2022-09-12 | 日立Astemo株式会社 | ステレオカメラ装置 |
| DE112020001434T5 (de) * | 2019-03-27 | 2021-12-23 | Sony Group Corporation | Datenverarbeitungsvorrichtung, datenverarbeitungsverfahren und programm |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001006096A (ja) * | 1999-06-23 | 2001-01-12 | Honda Motor Co Ltd | 車両の周辺監視装置 |
| JP2001169610A (ja) * | 1999-10-05 | 2001-06-26 | Shimazaki Shubyo Kk | 植物の種子の処理方法 |
| JP2009008539A (ja) * | 2007-06-28 | 2009-01-15 | Fuji Heavy Ind Ltd | ステレオ画像処理装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7415126B2 (en) | 1992-05-05 | 2008-08-19 | Automotive Technologies International Inc. | Occupant sensing system |
| JPH11223516A (ja) * | 1998-02-09 | 1999-08-17 | Fuji Xerox Co Ltd | 3次元画像撮像装置 |
| JP3596339B2 (ja) | 1999-03-15 | 2004-12-02 | 日産自動車株式会社 | 車間距離計測装置 |
| JP2001006069A (ja) | 1999-06-17 | 2001-01-12 | Shigeki Shiratori | セキュリティー用チェッカーおよび当該チェッカー利用のセキュリティー維持方法 |
| JP2001169310A (ja) | 1999-12-06 | 2001-06-22 | Honda Motor Co Ltd | 距離検出装置 |
| WO2005088970A1 (ja) * | 2004-03-11 | 2005-09-22 | Olympus Corporation | 画像生成装置、画像生成方法、および画像生成プログラム |
| JP2008269951A (ja) | 2007-04-20 | 2008-11-06 | Toyota Motor Corp | 燃料電池 |
| JP4942106B2 (ja) * | 2007-06-27 | 2012-05-30 | 独立行政法人情報通信研究機構 | 奥行データ出力装置及び奥行データ受信装置 |
| CN101251373A (zh) * | 2008-03-28 | 2008-08-27 | 北京工业大学 | 微结构三维尺寸立体图像快速检测方法 |
-
2008
- 2008-10-20 JP JP2008269951A patent/JP4631096B2/ja active Active
-
2009
- 2009-07-10 WO PCT/JP2009/003245 patent/WO2010047015A1/ja active Application Filing
- 2009-07-10 EP EP09821716A patent/EP2323098A4/en not_active Withdrawn
- 2009-07-10 US US13/119,324 patent/US8139821B2/en active Active
- 2009-07-10 CN CN200980141577.1A patent/CN102187367B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001006096A (ja) * | 1999-06-23 | 2001-01-12 | Honda Motor Co Ltd | 車両の周辺監視装置 |
| JP2001169610A (ja) * | 1999-10-05 | 2001-06-26 | Shimazaki Shubyo Kk | 植物の種子の処理方法 |
| JP2009008539A (ja) * | 2007-06-28 | 2009-01-15 | Fuji Heavy Ind Ltd | ステレオ画像処理装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013224919A (ja) * | 2012-03-21 | 2013-10-31 | Ricoh Co Ltd | 校正装置、距離計測装置及び車両 |
| JP2017198710A (ja) * | 2012-03-21 | 2017-11-02 | 株式会社リコー | 校正装置、距離計測装置及び車両 |
| WO2014061446A1 (ja) * | 2012-10-19 | 2014-04-24 | 日立オートモティブシステムズ株式会社 | ステレオ画像処理装置及びステレオ画像処理方法 |
| JP2014085120A (ja) * | 2012-10-19 | 2014-05-12 | Hitachi Automotive Systems Ltd | ステレオ画像処理装置及びステレオ画像処理方法 |
| JP2017049146A (ja) * | 2015-09-02 | 2017-03-09 | 富士重工業株式会社 | 画像処理装置 |
| KR102001339B1 (ko) * | 2018-01-26 | 2019-07-17 | 숭실대학교산학협력단 | 두 대의 카메라와 한 개의 led를 사용하는 차량 대 차량 거리 추정 방법 및 그 장치 |
| KR20190091174A (ko) * | 2018-01-26 | 2019-08-05 | 숭실대학교산학협력단 | 저해상도 카메라를 위한 보정 기법을 이용한 차량 간 거리 추정 방법 및 그 장치 |
| KR102019594B1 (ko) | 2018-01-26 | 2019-09-09 | 숭실대학교산학협력단 | 저해상도 카메라를 위한 보정 기법을 이용한 차량 간 거리 추정 방법 및 그 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2010047015A1 (ja) | 2010-04-29 |
| EP2323098A1 (en) | 2011-05-18 |
| EP2323098A4 (en) | 2011-09-28 |
| US8139821B2 (en) | 2012-03-20 |
| US20110170748A1 (en) | 2011-07-14 |
| CN102187367B (zh) | 2017-03-08 |
| JP4631096B2 (ja) | 2011-02-16 |
| CN102187367A (zh) | 2011-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4631096B2 (ja) | 車両周辺監視装置 | |
| JP4733756B2 (ja) | 車両周辺監視装置 | |
| JP4815488B2 (ja) | 車両周辺監視装置 | |
| JP4173901B2 (ja) | 車両周辺監視装置 | |
| JP4410292B1 (ja) | 車両の周辺監視装置 | |
| US8810653B2 (en) | Vehicle surroundings monitoring apparatus | |
| JP4173902B2 (ja) | 車両周辺監視装置 | |
| US9158738B2 (en) | Apparatus for monitoring vicinity of a vehicle | |
| JP4528283B2 (ja) | 車両周辺監視装置 | |
| JP2007334751A (ja) | 車両周辺監視装置 | |
| JP6384802B2 (ja) | 移動体検出装置、画像処理装置、移動体検出方法、及び、集積回路 | |
| JP5004923B2 (ja) | 車両の運転支援装置 | |
| JP4864953B2 (ja) | 車両周辺監視装置 | |
| JP4765113B2 (ja) | 車両周辺監視装置、車両、車両周辺監視用プログラム、車両周辺監視方法 | |
| JP2008108118A (ja) | 画像処理装置 | |
| JP2007233487A (ja) | 歩行者検出方法、装置、およびプログラム | |
| JP5399887B2 (ja) | 車両周辺監視装置 | |
| JP4975776B2 (ja) | 車両周辺監視装置 | |
| JP2008040724A (ja) | 画像処理装置、及び画像処理方法 | |
| JP5602354B2 (ja) | 車両周辺監視装置 | |
| JP6429101B2 (ja) | 画像判定装置、画像処理装置、画像判定プログラム、画像判定方法、移動体 | |
| JP5904927B2 (ja) | 車両用周辺監視装置 | |
| JP2016022845A (ja) | 車載画像処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100713 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100907 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101019 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101027 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4631096 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131126 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |