JP2017198710A - 校正装置、距離計測装置及び車両 - Google Patents
校正装置、距離計測装置及び車両 Download PDFInfo
- Publication number
- JP2017198710A JP2017198710A JP2017144230A JP2017144230A JP2017198710A JP 2017198710 A JP2017198710 A JP 2017198710A JP 2017144230 A JP2017144230 A JP 2017144230A JP 2017144230 A JP2017144230 A JP 2017144230A JP 2017198710 A JP2017198710 A JP 2017198710A
- Authority
- JP
- Japan
- Prior art keywords
- parallax
- parallax data
- image
- points
- coordinate conversion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Landscapes
- Measurement Of Optical Distance (AREA)
- Image Processing (AREA)
Abstract
Description
特許文献1および2では、静止物体の形状を記憶しておき、記憶された形状と照合して静止物体を認識し、自車の速度センサなどから移動距離を求め、静止物体との距離変化と対応づけることで、視差オフセットを算出する。そして、2つの異なる地点で撮影したステレオ画像から視差オフセット量を計測するという技術が開示されている。
特許文献1および2では、まず1枚の輝度画像から静止被写体を認識するため、静止被写体の形状(例えば青信号)をあらかじめ記録しておく必要がある。なお、記憶している被写体が存在しなければ動作できなので、例えば高速道路上に信号は無いため動作できない。交通標識など静止被写体の形状や大きさは地方や国ごとに異なり、また将来変更される可能性がある。そのため、登録された形状による静止被写体の判別という方法は安定な動作をしない可能性がある。
自動車が走行している限り、直前に平坦な路面が存在する可能性は非常に高く、この点、上述したように、対象物を発見できないという問題が生じる可能性は低い。なお、特許文献3に記載の技術によれば、特定形状の被写体を認識する必要がない。
また(カメラ解像度や対応点探索手法に依存するが)、路面上の濃淡は細かく遠距離の特徴点は数が少なくなるため、近距離しか距離計測できず、校正には利用できない。車間距離自動調整など、利用目的によっては、(路面濃淡より大きな構造である)先行車をより遠距離まで計測範囲としたいこともあり、これが校正の精度に悪影響を及ぼす可能性がある。
本発明は、上記に鑑みてなされたもので、その目的としては、より高精度な距離計測を行うために、ステレオカメラの経時的な位置ずれを高精度に補正すること、特に、カメラ以外の車速センサなど、自位置情報を計測するセンサに依存せずに、また、特定の形状の被写体の存在を仮定せず、稼働中に撮影される様々な画像を利用して、視差オフセットを安定して検出できる校正装置を提供することにある。
本出願人が先に出願した特願2010−204328(以下、「先願」と記載する)には、例えば車両など移動体に搭載することを前提に、カメラ自身が移動することにより、地面に対して静止した複数の被写体が、同じ距離だけ移動することを利用した校正技術について記載されている。
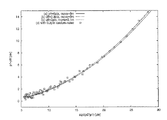
この技術は、同一被写体を2地点からステレオ撮影することで得られる2つの視差の差を求めることで、視差オフセットの影響をキャンセルするために、「視差」と「視差の差」という2軸からなる空間で計測データをモデル化している。
図1に示すグラフの横軸は、代表視差(√p0*p1)、縦軸は視差の差(p1−p0)であり、グラフ中の各線、点の意味は以下の通りである。
(a)視差オフセットなし(0画素)、2地点間の移動距離3m
(b)視差オフセット1画素、2地点間の移動距離3m
(c)視差オフセット0画素、2地点間の移動距離3.3m
(d)(b)の理想視差データに振幅0.3画素の乱数を加えた仮想計測データ
ここで、図1を参照すると、
(1)(a)の視差オフセットなしと(b)視差オフセット=1画素の曲線にずれがあること、
(2)オフセットのある仮想的な計測データ(d)は確かに(b)の回りに分布していること、
が理解できる。実際にこの(d)のデータに2次曲線をフィットさせると、(b)の曲線に極く近い結果が得られる。
したがって、自車両における移動距離センサの有無や、ステレオ画像の対応点探索誤差(視差検出誤差)など、様々な条件にもよるが、視差オフセット検出精度に限界があった。
そこで、視差オフセット検出精度を向上するための視差オフセットの補正方法が切望される。
本発明による視差オフセットの補正方法の原理について説明する。
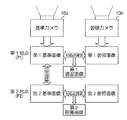
まず、図2、図3について
(1)直進移動するステレオカメラ10、11によって、2地点(第1地点P1、第2地点P2)から、地面に対して静止する被写体、および移動する被写体を含む、周囲の風景として基準画像、参照画像をそれぞれ2枚ずつ撮影する。
(2)第1地点及び第2地点について、基準画像と参照画像との間で対応点(対応する特徴点)を探索しそれぞれの地点での視差画像を算出する。ここで、視差画像とは、視差を画素値とした画像のことである。
(3)第1地点及び第2地点の基準画像間で対応点(対応する特徴点)を探索し、同一被写体を撮影した特徴点を対応づける。
このような処理により、同一被写体を2地点で撮影した2つの視差データの対を(特徴点ごとに)複数収集する。図4は特徴点番号毎に視差1(P0)、視差2(P1)を関連付けしたことを示す図である。
2つの視差の差分(p1−p0)を利用する「先願」では、静止被写体は2次曲線上にのるという制約条件だったため、モデルフィットに課題があった。
一方、本発明では、この2つの視差データの比(p1/p0)や、逆数の差(1/p1−1/p0)を座標軸とする空間を利用することで、より安定したモデルフィッティングを行い、結果としてより信頼度の高い補正を実現する。
本発明では、視差−視差逆数差パラメータ空間横軸に2つの視差の逆数の平均((1/p0+1/p1)/2)、縦軸に視差の逆数の差(1/p0−1/p1)をとる。
視差の逆数は距離に比例するので、(静止被写体は同一距離移動するという前提から)逆数の差(1/p0−1/p1)は、視差オフセットが0画素ならば一定となる。
視差オフセットが存在する場合の制約の厳密解は複雑になるが、図6に示すように、視差オフセットが±1画素程度の範囲ではほぼ直線で、視差オフセット量に応じて直線の傾きが変化すると見なすことができる。
また、視差検出誤差を考慮すると、視差の逆数を求めているため、視差が小さい(=逆数が大きい)領域では、相対的にノイズが増えてしまう。しかし、視差の大きい領域(例えば図5の横軸:0から0.05の範囲)ならば、3.3mの移動量と1画素の視差オフセットは、図1とは異なり容易に区別できることが理解できる。
(1)ほぼ直線状に分布する。
(2)移動距離は直線の高さ(y切片)に対応する(移動距離に応じてグラフ全体が縦軸方向に伸縮する)。
(3)視差オフセットは直線の傾きに対応する。
以上のことが理解できる。
フィットすべきモデルが直線ですむこと、未知数である移動距離と視差オフセットが、高さと傾きに分離されることから、この空間でのモデルフィットによる視差オフセットの推定が容易となり、安定して高精度な推定が期待できる。
そこで、視差−視差比パラメータ空間横軸に一方の視差そのもの(p0)、縦軸に視差の比(p0/p1)をとる。
この空間は、図5ともまた違うが、以下の特徴を持つことが理解できる。
(1)静止被写体は(ほぼ)直線状にならぶ(ただし視差オフセット0でも水平ではない)
(2)移動距離に応じて直線は傾きが変化する
(3)視差オフセットに応じて直線は(ほぼ)平行移動する
(4)視差が小さい場合には視差検出誤差の影響が大きいが、視差が大きくなるにつればらつきは小さくなる。
よって、この空間でも、カメラ移動量と視差オフセットは、平行移動と傾きに(近似的に)分離され、3.3mの移動量と1画素の視差オフセットの区別も容易となる。
これらのように、2つの視差(p0,p1)を適切な座標系へ変換した後で評価することにより、未知数であるカメラ移動量と視差オフセットをより安定に推定することができるようになる。
本件は、「先願」において、オフセット値を求めるためにプロットした点から二次曲線を推定する際に、オフセット値が0で距離が異なっている二次曲線と似ていることがあるため混同しやすかった部分を、座標変換によって距離の差とオフセット値の差が切片と傾きに分離することで、より求め易くすることができる。
以下、本発明の第1実施形態に係わる校正装置を含む距離計測装置について説明する。
図9は、本発明の第1実施形態に係わる校正装置を含む距離計測装置、第1実施形態に係わる校正装置を含むハードウエアのブロック図である。
第1カメラ11a、第2カメラ11bは、画像を撮影するために、平行配置された2台のカメラである。
視差計算部12は、2台のカメラ11a、11bで撮影された画像を入力し、視差画像データを出力する。
視差計算部12は、バス接続されたCPU(Central Processing Unit)、DRAM(Dynamic Random Access Memory)メモリ、不揮発性フラッシュメモリなどから構成される一般的な電子計算機であり、距離計測機能は、フラッシュメモリに記録され、CPU、DRAMなどを利用して実行されるソフトウエアプログラムの形態で実装する。
カメラ制御部13は、2台のカメラを制御し画像データの入力を行う。また、2台のカメラ同期、カメラ初期化、露光制御などを実行する。ここでは説明しないが、必要に応じ、光学系による歪曲、画像回転など、一般的にステレオ距離計測に有効とされる(視差オフセット以外の)画像補正処理を、入力直後に施すことが望ましい。
視差画像生成処理部14は、カメラ制御部13から入力されるステレオ画像から、視差画像を生成する。測距装置としての中心的な役割を果す。
視差画像生成処理部14は、「基準画像」が撮影された同じ複数地点(例えば2地点)において他方の撮像装置(第2カメラ11b)により撮像された2つの「対応画像」と、カメラ制御部13から入力される上記2つの「基準画像」と、を用いて各地点におけるステレオ画像の「基準画像」と「対応画像」とに共通する特徴点の位置から複数の「視差データ(視差画像)」を算出する。
図10に示すように、視差画像生成処理部14は、カメラ制御部13から複数地点におけるステレオ画像を取得するステレオ画像取得部30、各ステレオ画像における特徴点を抽出する特徴点抽出部31、基準画像と対応画像において対応する特徴点(対応点)を探索する対応点探索部32、対応点位置の差分から視差を算出する視差算出部33、算出された視差に基づく視差画像を出力する視差画像出力部34の各処理部を備えている。
視差オフセット検出処理部15は、カメラ制御部から入力される基準画像、および、視差画像生成処理部14から入力される視差画像を利用して、視差オフセットを算出する。算出した視差オフセットは視差画像生成処理部14に送られ、以降の視差画像生成処理に利用される。
図10に詳しく示すように、視差オフセット検出処理部15は、画像取得部20、特徴点探索部21、座標変換部22、補正値計算部23の各処理部を備えている。
これらの処理部において、画像取得部20は、複数地点(例えば2地点)において一方の撮像装置(例えば第1カメラ11a)で撮像された複数(例えば2つ)の「基準画像」をカメラ制御部13から取得する。
さらに、画像取得部20は、視差画像生成処理部14によって生成された「基準画像」(の特徴点)に対応する複数(2つ)の「視差データ(視差画像)」の入力を視差画像生成処理部14から受け付ける。
また、特徴点探索部21は、画像取得部20がカメラ制御部13より取得した2つの(2地点の)「基準画像」の中の共通する複数の特徴点を探索する。
また、座標変換部22は、特徴点探索部21により探索された「基準画像」に共通する特徴点に対して、2つの「視差データ(視差画像)」を下記に詳述するように座標変換する。
さらに、補正値計算部23は、座標変換部22が出力する座標変換された視差データから、撮像装置(第1カメラ11a、第2カメラ11b)の位置に関するパラメータの補正値(視差オフセット)を算出して視差画像生成処理部14に供給する。
視差画像生成処理部14は、一般的なステレオカメラによる距離計測処理を行う。ただし、視差オフセット検出処理部15により生成される視差オフセットを利用することで、ハードウエアの経時変化による計測精度劣化を低減する。
視差オフセット検出処理部15の各処理部における詳細な処理は、下記に詳述するものとする。
ステップS10では、ステレオ画像取得部30(図10)によりステレオ画像を入力する。すなわち、平行配置された2台のカメラで同時に撮影されたステレオ画像を入力する。
ステップS15では、特徴点抽出部31(図10)によりステレオ画像における特徴点を抽出する。ステップS20では、対応点探索部32(図10)により対応点の探索を行う。
すなわち、まず基準となる(例えば左カメラ)画像から濃淡変化の激しい特徴点を複数抽出する(ステップS15)。次に反対の(右)カメラ画像から、基準画像上の各特徴点近傍領域(ブロック)と同じ被写体の写った対応点の位置を探索する(ステップS20)。対応点探索には、SAD(Sum of Absolute Difference)やPOC(位相限定相関)など周知の技術を利用することができる。
ステップS25では、視差算出部33(図10)により視差を算出する。すなわち、対応点探索処理で算出した左右画像上の対応点位置の差分を取り、視差を算出する。さらに視差オフセット検出処理から入力する視差オフセットを減算し、視差オフセット補正を実行する。後述の視差オフセット検出処理の結果が出るまでは、初期値として0を利用する。
ステップS30では、視差画像出力部34(図10)により視差画像を出力する。すなわち、視差オフセット補正がなされた視差を画素値とする視差画像を出力する。
以上の処理を定期的に繰返し実行することで、常にカメラ前方の視差画像を出力し続ける。
ステップS50では、画像を入力する。すなわち、カメラ制御部13から第1地点及び第2地点の基準画像を入力する。また視差画像生成処理部14から、基準画像に対応する2枚の視差画像を入力する。これらの処理は、図10における画像取得部20によって行われる。
ステップS55では、同一被写体を撮影した特徴点を対応づけて対応点を探索する。すなわち、2枚の基準画像間で対応点(対応する特徴点)を探索する。視差画像生成処理部14内の対応点探索と同様にブロックごとにSADを計算し、最小値をとる位置を探索する。ただしステレオ画像の対応点探索とは異なり、放射状の探索範囲を設定する。このように探索範囲を設定することにより、対応点探索処理の演算量を低減し、同時に横方向への移動物体や自車の回転をある程度排除できる。かかる処理は、図10における特徴点探索部21によって行われる。
ステップS60では、視差データ座標を変換する。すなわち、特徴点ごとに、対応する2つの視差データ(p0,p1)から、以下の通り、視差の逆数の平均P、および逆数の差Qを算出する。
P=(1/2)×((1/p0)+(1/p1))…(1)
Q=(1/p0)−(1/p1)…(2)
これらの処理は、図10における座標変換部22によって行われる。
モデルフィットP−Qデータに対してハフ変換により、Q=aP+bなる直線を抽出する。
具体的には、決定したいパラメータa、bからなる2次元平面の、あらかじめ設定した範囲を所定の間隔で多数の領域に分割し、各領域に対応する2次元配列をメモリ上に用意する。Q=aP+bという式をa、b空間の直線とみなし、計測された各p0、p00に対して、上記a、b空間を表す2次元配列の、直線b=−aP+Q上に「投票」する。全てのデータ(P,Q)についての投票の結果、最も得票の多い領域に対応するa、bペアが、多くの計測値(P,Q)を通る直線を表すものと考えられるので、そのa、bペアをモデル直線として選択する。
このように、カメラ自身の移動距離と、視差オフセットの影響を分離しやすい座標系に変換することにより、適用可能性が高く、かつ精度の高い校正装置を実現できる。
計測データの単純な直線近似に基づき補正値を算出することにより、低コストで安定した校正装置を実現できる。
poff=a/2b…(3)
なお、この視差オフセットの推定値は、曲線を直線近似した結果であり、モデル段階で推定誤差が避けられない。しかし、この視差オフセット検出処理と補正処理を繰返し実行するので、視差オフセットが0に近づくほど誤差が低減っていれば、多数回の繰返しの後では、0付近に落ち着くことが期待できる。
以上の処理は、図10における補正値計算部23によって行われる。
なお、正規化と蓄積、信頼性評価も有効であり、実施することが望ましい。
また、本実施形態において説明した座標変換処理では、横軸に二つの視差の逆数の平均を求めたが、いずれかの視差の逆数(1/p0または1/p1)をとっても、類似した傾向となる。また、縦軸として、直接逆数の差を計算するのではなく、
(1/p0−1/p1)=(p1−p0)/p0p1…(4)
を計算することで除算回数を1回減らすこともできる。
以上のように、地点で撮影されたステレオ画像のみから算出されるデータだけを利用して視差オフセット量を推定するので、カメラ以外の車速センサなど、自位置情報を計測するセンサの性能に依存せずに、また、例えば信号機や路面平面など、特定の形状の被写体の存在を仮定せず、稼働中に撮影される様々な画像を利用して、視差オフセットを安定して検出できる校正装置を実現することできる。
次に、第2実施形態として、視差−視差比空間を利用する例について説明する。
本実施形態では、第1実施形態とほぼ同様であるので、ここでは第1実施形態と異なるソフトウエアプログラムである「視差オフセット検出処理」における視差データ座標変換処理とモデルフィット処理のみ説明する。
視差データ座標変換の特徴点ごとに、対応する2つの視差データ(p0,p1)から、以下の通り、視差比pを算出する。
p=p0/p1…(5)
第1実施形態において説明したモデルフィット処理と同様に、視差−視差比データに対してハフ変換処理により、p0=ap+bなる直線を抽出する。
ここで、得られるパラメータa、bから、視差オフセット推定値を決定する。図7、8に示すような様々なカメラ移動量、視差オフセット量でのシミュレーションを行い、a、bから視差オフセット量への近似的な換算式をあらかじめ設定しておくことができる。ここでは、以下の式に従い視差オフセット推定値(poff)を算出する。
poff=(1−b)/2a…(6)
このように、探索された各特徴点に対して、2つの基準画像の各特徴点における2つの視差データから2つの視差比を算出し、視差−視差比データに対してハフ変換処理により、p0=ap+bなる直線を抽出することで、ステレオカメラの経時的な位置ずれを高精度に補正することができる。
特に、カメラ以外の車速センサなど、自位置情報を計測するセンサに依存せずに、また、特定の形状の被写体の存在を仮定せず、稼働中に撮影される様々な画像を利用して、視差オフセットを安定して検出することができる。
図13は、本実施形態の距離計測装置を適用可能な車両を示す模式図である。
本実施形態の画像処理システムは、車両前方の画像を取得するための撮像ユニット101と、取得した画像に基づいて車両100の前方に存在する他の車両までの距離を算出する等の処理を行う画像解析ユニット102を有している。撮像ユニット101は、車両100が走行する前方の画像を撮像できるように、座席のルームミラー位置等に設置されている。撮像ユニット101で撮像された車両前方の画像は、画像信号化されて画像解析ユニット102に入力される。画像解析ユニット102は、撮像ユニット101から出力された画像信号を解析する。
撮像ユニット101として、上記実施形態の第1カメラ11a、第2カメラ11bを適用できる。
また、画像解析ユニット102の一部の機能として、上記実施形態の視差計算部12を適用することが出来る。
車両走行制御ユニット108は、画像解析ユニット102で計算された距離に基づいてハンドルやブレーキの制御も行うことが出来る。
Claims (6)
- 2つの撮像装置を用いて距離計測を行う距離計測装置に設定される該撮像装置の位置に関するパラメータを校正するための校正装置であって、
2地点において一方の前記撮像装置で撮像された2つの基準画像と、前記2地点において他方の前記撮像装置で撮像された2つの対応画像とを用い、各地点につき前記基準画像と前記対応画像の中の共通する複数の特徴点の位置から複数の視差データを算出する算出部と、
前記2地点での複数の視差データを互いに対応づけた複数の視差データ対を、複数の変換後視差データ対に座標変換する座標変換部と、
前記座標変換部により座標変換された複数の前記変換後視差データ対にモデルフィッティングを行い、撮像装置の位置に関するパラメータの補正値を算出する補正値計算部と、を備えることを特徴とする校正装置。 - 前記座標変換部は、前記複数の視差データ対を、視差データ対における互いの視差データの比を算出することにより座標変換することを特徴とする請求項1に記載の校正装置。
- 前記座標変換部は、前記複数の視差データ対を、視差データ対における互いの視差データの逆数の差を算出することにより座標変換することを特徴とする請求項1または2に記載の校正装置。
- 前記補正値計算部は、前記複数の変換後視差データ対を直線近似し、前記近似直線から補正値を算出することを特徴とする請求項1乃至3の何れか一項に記載の校正装置。
- 2つの撮像装置を用いて距離計測を行う距離計測装置であって、前記撮像装置の位置に関するパラメータを校正する校正装置を備え、
前記校正装置は、請求項1乃至4の何れか一項に記載の校正装置であることを特徴とする距離計測装置。 - 請求項5に記載の距離計測装置を備えたことを特徴とする車両。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012063639 | 2012-03-21 | ||
| JP2012063639 | 2012-03-21 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013002679A Division JP6182866B2 (ja) | 2012-03-21 | 2013-01-10 | 校正装置、距離計測装置及び車両 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017198710A true JP2017198710A (ja) | 2017-11-02 |
| JP2017198710A5 JP2017198710A5 (ja) | 2018-02-15 |
| JP6365744B2 JP6365744B2 (ja) | 2018-08-01 |
Family
ID=60239358
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017144230A Active JP6365744B2 (ja) | 2012-03-21 | 2017-07-26 | プログラム、記録媒体、及び校正方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6365744B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022224533A1 (ja) * | 2021-04-21 | 2022-10-27 | 日立Astemo株式会社 | 車載撮像装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10103949A (ja) * | 1996-09-26 | 1998-04-24 | Fuji Electric Co Ltd | 距離検出値の補正方法 |
| JPH10341458A (ja) * | 1997-06-10 | 1998-12-22 | Toyota Motor Corp | 車載ステレオカメラの校正方法、および、その方法を適用した車載ステレオカメラ |
| JP2003329439A (ja) * | 2002-05-15 | 2003-11-19 | Honda Motor Co Ltd | 距離検出装置 |
| JP2009075124A (ja) * | 2008-11-06 | 2009-04-09 | Honda Motor Co Ltd | 距離検出装置 |
| JP2010097561A (ja) * | 2008-10-20 | 2010-04-30 | Honda Motor Co Ltd | 車両周辺監視装置 |
-
2017
- 2017-07-26 JP JP2017144230A patent/JP6365744B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10103949A (ja) * | 1996-09-26 | 1998-04-24 | Fuji Electric Co Ltd | 距離検出値の補正方法 |
| US5915033A (en) * | 1996-09-26 | 1999-06-22 | Fuji Electric Co., Ltd. | Method for correcting detected distance values |
| JPH10341458A (ja) * | 1997-06-10 | 1998-12-22 | Toyota Motor Corp | 車載ステレオカメラの校正方法、および、その方法を適用した車載ステレオカメラ |
| JP2003329439A (ja) * | 2002-05-15 | 2003-11-19 | Honda Motor Co Ltd | 距離検出装置 |
| JP2010097561A (ja) * | 2008-10-20 | 2010-04-30 | Honda Motor Co Ltd | 車両周辺監視装置 |
| JP2009075124A (ja) * | 2008-11-06 | 2009-04-09 | Honda Motor Co Ltd | 距離検出装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022224533A1 (ja) * | 2021-04-21 | 2022-10-27 | 日立Astemo株式会社 | 車載撮像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6365744B2 (ja) | 2018-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6182866B2 (ja) | 校正装置、距離計測装置及び車両 | |
| JP5440461B2 (ja) | 校正装置、距離計測システム、校正方法および校正プログラム | |
| CN111436216B (zh) | 用于彩色点云生成的方法和系统 | |
| US10909395B2 (en) | Object detection apparatus | |
| AU2018282302B2 (en) | Integrated sensor calibration in natural scenes | |
| KR102166691B1 (ko) | 객체의 3차원 형상을 산출하는 장치 및 방법 | |
| JP2007263669A (ja) | 3次元座標取得装置 | |
| JP6552448B2 (ja) | 車両位置検出装置、車両位置検出方法及び車両位置検出用コンピュータプログラム | |
| KR102268094B1 (ko) | 동적 입체 캘리브레이션을 위한 시스템 및 방법 | |
| JP2015135317A (ja) | 画像処理装置、システム、画像処理方法およびプログラム | |
| JP2016200557A (ja) | 校正装置、距離計測装置及び校正方法 | |
| JP2018077162A (ja) | 車両位置検出装置、車両位置検出方法及び車両位置検出用コンピュータプログラム | |
| JP6543935B2 (ja) | 視差値導出装置、機器制御システム、移動体、ロボット、視差値導出方法、およびプログラム | |
| JP2021051347A (ja) | 距離画像生成装置及び距離画像生成方法 | |
| JP6365744B2 (ja) | プログラム、記録媒体、及び校正方法 | |
| WO2020113425A1 (en) | Systems and methods for constructing high-definition map | |
| KR101911860B1 (ko) | 깊이 영상에서 카메라 모델 및 필터를 이용한 도로 검출 방법 및 장치 | |
| JP6739367B2 (ja) | カメラ装置 | |
| KR101266623B1 (ko) | 차량간 거리 추정방법 및 그 장치 | |
| WO2023247109A1 (en) | Automatic extrinsic calibration and calibration validation of different sensor modalities, e.g camera, radar and lidar sensors | |
| WO2023139675A1 (ja) | 撮像装置、視差ずれ補正方法、及び視差ずれ補正プログラム | |
| CN116993800A (zh) | 基于相机模组的深度图像生成方法、装置及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171226 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180530 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180605 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180618 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6365744 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |