JP2010093785A - べき級数型プリディストータ、べき級数型プリディストータの制御方法 - Google Patents
べき級数型プリディストータ、べき級数型プリディストータの制御方法 Download PDFInfo
- Publication number
- JP2010093785A JP2010093785A JP2009201241A JP2009201241A JP2010093785A JP 2010093785 A JP2010093785 A JP 2010093785A JP 2009201241 A JP2009201241 A JP 2009201241A JP 2009201241 A JP2009201241 A JP 2009201241A JP 2010093785 A JP2010093785 A JP 2010093785A
- Authority
- JP
- Japan
- Prior art keywords
- distortion
- distortion component
- phase
- value
- amplitude
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/32—Modifications of amplifiers to reduce non-linear distortion
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/32—Modifications of amplifiers to reduce non-linear distortion
- H03F1/3241—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits
- H03F1/3247—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits using feedback acting on predistortion circuits
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/32—Modifications of amplifiers to reduce non-linear distortion
- H03F1/3241—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits
- H03F1/3258—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits based on polynomial terms
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/62—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission for providing a predistortion of the signal in the transmitter and corresponding correction in the receiver, e.g. for improving the signal/noise ratio
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Nonlinear Science (AREA)
- Power Engineering (AREA)
- Algebra (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Amplifiers (AREA)
- Transmitters (AREA)
Abstract
【解決手段】本発明のべき級数型プリディストータは、信号に遅延を与える遅延経路と、N次歪発生器とベクトル調整器とを有する歪発生経路と、入力信号を遅延経路と歪発生経路に分配する分配器と、遅延経路の出力と歪発生経路の出力とを合成する合成器と、ベクトル調整器を制御する制御器とで構成される。制御器は、設定部、歪成分測定部、最小条件計算部、記録部を有する。設定部は、ベクトル調整器の位相値または振幅値を設定する。歪成分測定部は、電力増幅器の歪成分を測定する。最小条件計算部は、設定部がサンプリングのために設定した3つ以上の位相値または振幅値に対する歪成分の大きさを用いて、歪成分が最小となる位相値または振幅値を関数近似により求める。
【選択図】図3
Description
また、周波数特性補償器を具備するべき級数型ディジタルプリディストータでは、N個の複素乗算器の複素乗算係数を設定する必要がある。したがって、複素乗算器係数が多くなれば、さらに制御に時間がかかる課題があった。
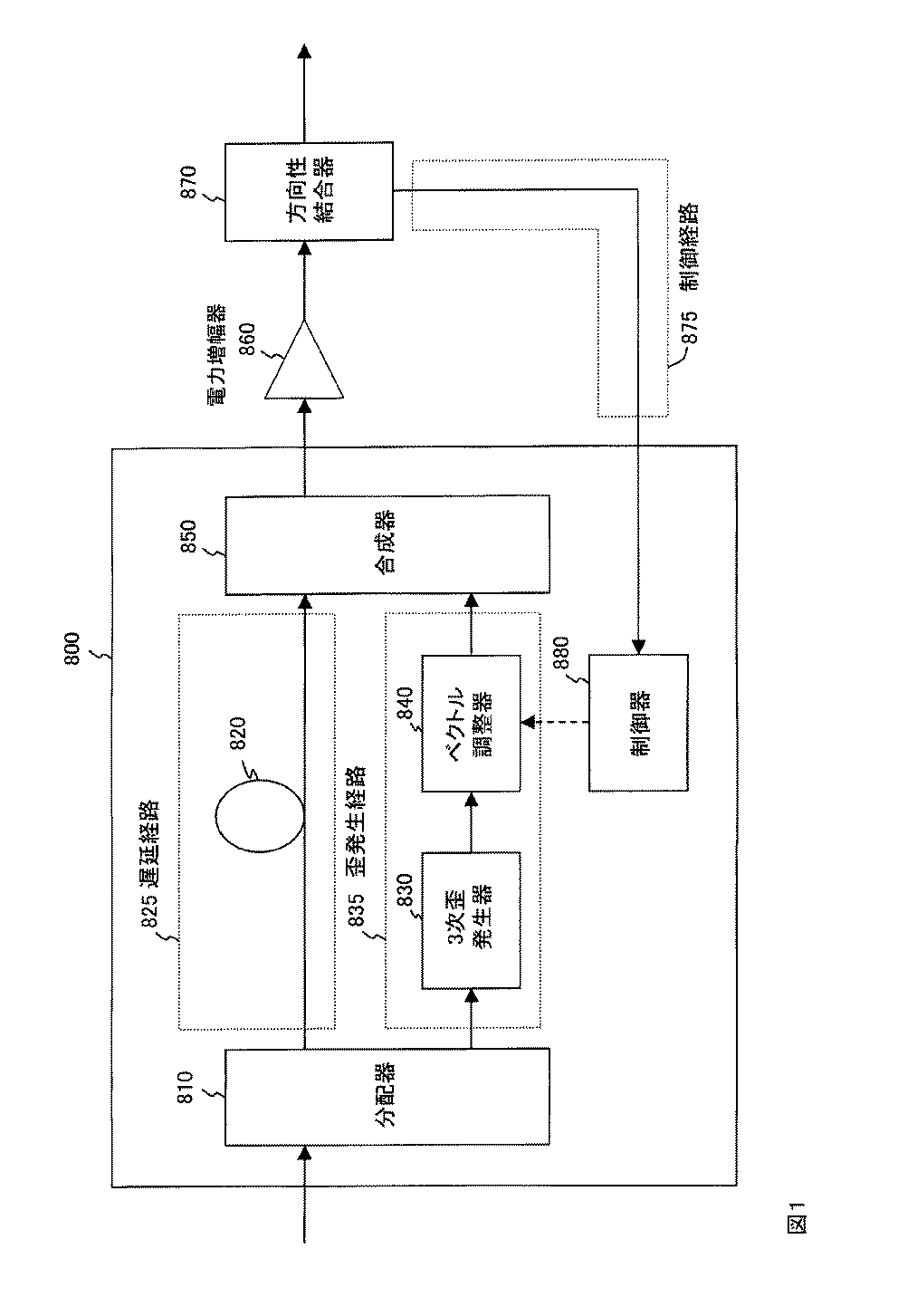
135、235、435、835、935 歪発生経路
140、240、840 ベクトル調整器 141、241 可変位相部
142、242 可変減衰部 171 周波数変換器
172 直交復調器 175、875 制御経路
180、280、380、480、880、980 制御器
181、281、381、481 設定部 182 歪成分測定部
183 係数計算手段 184 最小条件計算部
185、485 記録部 210、810 分配器
221、222、920 遅延メモリ 225、825、925 遅延経路
230、830 3次歪発生器 250、850 合成器
261 周波数変換器 262 直交変調器
390、990 周波数特性補償器 391、991 FFT部
392、992 複素乗算部 393、993 逆FFT部
820 遅延線路 860 電力増幅器
870 方向性結合器
Claims (11)
- 信号に遅延を与える遅延経路と、
N次歪発生器とベクトル調整器とを有する歪発生経路と
入力信号を前記遅延経路と前記歪発生経路に分配する分配器と、
前記遅延経路の出力と前記歪発生経路の出力とを合成する合成器と、
前記ベクトル調整器を制御する制御器と
で構成され、
Nは3以上の奇数であり、
前記制御器は、
前記ベクトル調整器の出力の位相値または振幅値を設定する設定部と、
歪成分を測定する歪成分測定部と、
前記設定部がサンプリングのために設定した3つ以上の位相値または振幅値に対する歪成分の大きさを用いて、歪成分が最小となる位相値または振幅値を求める最小条件計算部と、
あらかじめ定めたサンプリングのために設定するべき3つ以上の位相値または振幅値を記録する記録部と
を備えるべき級数型プリディストータ。 - 信号に遅延を与える遅延経路と、
N次歪発生器と周波数特性補償器とを有する歪発生経路と
入力信号を前記遅延経路と前記歪発生経路に分配する分配器と、
前記遅延経路の出力と前記歪発生経路の出力とを合成する合成器と、
前記周波数特性補償器を制御する制御器と
で構成され、
Nは3以上の奇数であり、
前記周波数特性補償器は、時系列の信号を周波数帯の信号に変換するFFT部と、N個の複素乗算部と、周波数帯の信号を時系列の信号に変換する逆FFT部とを備え、
前記制御器は、
前記複素乗算部ごとの出力の位相値または振幅値を設定する設定部と、
歪成分を測定する歪成分測定部と、
前記設定部がサンプリングのために設定した3つ以上の位相値または振幅値に対する歪成分の大きさを用いて、歪成分が最小となる位相値または振幅値を求める最小条件計算部と、
あらかじめ定めたサンプリングのために設定するべき3つ以上の位相値または振幅値を記録する記録部と
を備えるべき級数型プリディストータ。 - 信号に遅延を与える遅延経路と、
N次歪発生器とベクトル調整器と周波数特性補償器とを有する歪発生経路と
入力信号を前記遅延経路と前記歪発生経路に分配する分配器と、
前記遅延経路の出力と前記歪発生経路の出力とを合成する合成器と、
前記ベクトル調整器と周波数特性補償器とを制御する制御器と
で構成され、
Nは3以上の奇数であり、
前記周波数特性補償器は、時系列の信号を周波数帯の信号に変換するFFT部と、N個の複素乗算部と、周波数帯の信号を時系列の信号に変換する逆FFT部とを備え、
前記制御器は、
前記ベクトル調整器の出力の位相値または振幅値、および前記複素乗算部ごとの出力の位相値または振幅値を設定する設定部と、
歪成分を測定する歪成分測定部と、
前記設定部がサンプリングのために設定した3つ以上の位相値または振幅値に対する歪成分の大きさを用いて、歪成分が最小となる位相値または振幅値を求める最小条件計算部と、
あらかじめ定めたサンプリングのために設定するべき3つ以上の位相値または振幅値を記録する記録部と
を備えるべき級数型プリディストータ。 - 前記最小条件計算部は、
前記設定部がサンプリングのために設定した3つ以上の位相値または振幅値に対する歪成分から、位相値または振幅値と歪成分との関係を示す2次方程式の係数を求める係数計算手段も備え、
前記係数計算手段が求めた2次方程式の係数から、歪成分が最小となる位相値または振幅値を求める
ことを特徴とする請求項1から3のいずれかに記載のべき級数型プリディストータ。 - 請求項1記載のべき級数型プリディストータの制御方法であって、
前記設定部がサンプリングのために3つ以上の前記ベクトル調整器の出力の位相値または振幅値を設定し、前記歪成分測定部が前記の3つ以上の位相値または振幅値に対する歪成分の大きさをそれぞれ測定するベクトルサンプリング過程と、
前記最小条件計算部が、前記ベクトルサンプリング過程の測定結果から、歪成分が最小となる位相値または振幅値を求めるベクトル最小条件計算過程と、
前記設定部が前記ベクトル最小条件計算過程の計算結果に従って、位相値または振幅値を設定するベクトル計算結果設定過程と
を有する
ことを特徴とするべき級数型プリディストータの制御方法。 - 請求項2記載のべき級数型プリディストータの制御方法であって、
前記複素乗算部ごとに、
前記設定部がサンプリングのために3つ以上の出力の位相値または振幅値を設定し、前記歪成分測定部が前記の3つ以上の位相値または振幅値に対する歪成分の大きさをそれぞれ測定する複素乗算サンプリング過程と、
前記最小条件計算部が、前記複素乗算サンプリング過程の測定結果から、歪成分が最小となる位相値または振幅値を求める複素乗算最小条件計算過程と、
前記設定部が前記複素乗算最小条件計算過程の計算結果に従って、位相値または振幅値を設定する複素乗算計算結果設定過程と
を有する
ことを特徴とするべき級数型プリディストータの制御方法。 - 請求項3記載のべき級数型プリディストータの制御方法であって、
前記設定部がサンプリングのために3つ以上の前記ベクトル調整器の出力の位相値または振幅値を設定し、前記歪成分測定部が前記の3つ以上の位相値または振幅値に対する歪成分の大きさをそれぞれ測定するベクトルサンプリング過程と、
前記最小条件計算部が、前記ベクトルサンプリング過程の測定結果から、歪成分が最小となる位相値または振幅値を求めるベクトル最小条件計算過程と、
前記設定部が前記ベクトル最小条件計算過程の計算結果に従って、位相値または振幅値を設定するベクトル計算結果設定過程と、
を有し、さらに、
前記複素乗算部ごとに、
前記設定部がサンプリングのために3つ以上の出力の位相値または振幅値を設定し、前記歪成分測定部が前記の3つ以上の位相値または振幅値に対する歪成分の大きさをそれぞれ測定する複素乗算サンプリング過程と、
前記最小条件計算部が、前記複素乗算サンプリング過程の測定結果から、歪成分が最小となる位相値または振幅値を求める複素乗算最小条件計算過程と、
前記設定部が前記複素乗算最小条件計算過程の計算結果に従って、位相値または振幅値を設定する複素乗算計算結果設定過程と
を有する
ことを特徴とするべき級数型プリディストータの制御方法。 - まず、振幅値を一定とした上で、歪成分が最小となる位相値を求め、
次に、求めた位相値に設定した上で、歪成分が最小となる振幅値を求める
ことを特徴とする請求項5から7のいずれかに記載のべき級数型プリディストータの制御方法。 - まず、位相値を一定とした上で、歪成分が最小となる振幅値を求め、
次に、求めた振幅値に設定した上で、歪成分が最小となる位相値を求める
ことを特徴とする請求項5から7のいずれかに記載のべき級数型プリディストータの制御方法。 - 請求項1記載のべき級数型プリディストータと請求項2記載のべき級数型プリディストータの両方を備えるときのべき級数型プリディストータの制御方法であって、
まず、前記周波数特性補償器の設定を一定とした上で、前記ベクトル調整器の制御を行い、
次に、前記ベクトル調整器の設定を一定とした上で、前記周波数特性補償器の制御を行う
ことを特徴とするべき級数型プリディストータの制御方法。 - 請求項1記載のべき級数型プリディストータと請求項2記載のべき級数型プリディストータの両方を備えるときのべき級数型プリディストータの制御方法であって、
まず、前記ベクトル調整器の設定を一定とした上で、前記周波数特性補償器の制御を行い、
次に、前記周波数特性補償器の設定を一定とした上で、前記ベクトル調整器の制御を行う
ことを特徴とするべき級数型プリディストータの制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009201241A JP5060532B2 (ja) | 2008-09-10 | 2009-09-01 | べき級数型プリディストータ、べき級数型プリディストータの制御方法 |
| KR1020090083807A KR101150734B1 (ko) | 2008-09-10 | 2009-09-07 | 멱급수형 프리디스토터, 멱급수형 프리디스토터의 제어방법 |
| EP09011496.8A EP2164171B1 (en) | 2008-09-10 | 2009-09-08 | Power series predistorter and control method thereof |
| US12/555,420 US7948311B2 (en) | 2008-09-10 | 2009-09-08 | Power series predistorter and control method thereof |
| CN2009101728867A CN101674054B (zh) | 2008-09-10 | 2009-09-10 | 幂级数型前置补偿器、幂级数型前置补偿器的控制方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008231835 | 2008-09-10 | ||
| JP2008231835 | 2008-09-10 | ||
| JP2009201241A JP5060532B2 (ja) | 2008-09-10 | 2009-09-01 | べき級数型プリディストータ、べき級数型プリディストータの制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010093785A true JP2010093785A (ja) | 2010-04-22 |
| JP5060532B2 JP5060532B2 (ja) | 2012-10-31 |
Family
ID=41417461
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009201241A Expired - Fee Related JP5060532B2 (ja) | 2008-09-10 | 2009-09-01 | べき級数型プリディストータ、べき級数型プリディストータの制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7948311B2 (ja) |
| EP (1) | EP2164171B1 (ja) |
| JP (1) | JP5060532B2 (ja) |
| KR (1) | KR101150734B1 (ja) |
| CN (1) | CN101674054B (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012049735A (ja) * | 2010-08-25 | 2012-03-08 | Nippon Hoso Kyokai <Nhk> | デジタル信号の送信装置 |
| WO2012111583A1 (ja) * | 2011-02-18 | 2012-08-23 | 株式会社エヌ・ティ・ティ・ドコモ | べき級数型ディジタルプリディストータとその制御方法 |
| US8890134B2 (en) | 2012-07-06 | 2014-11-18 | Samsung Electronics Co., Ltd. | Organic photoelectric material and organic photoelectric device and image sensor |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100801578B1 (ko) * | 2006-12-07 | 2008-02-11 | 한국전자통신연구원 | 전력증폭기의 혼변조 신호발생기 및 이를 구비한 전치왜곡선형화 장치 |
| US8891715B2 (en) | 2011-02-16 | 2014-11-18 | Analog Devices, Inc. | Digital pre-distortion |
| US8885763B2 (en) | 2011-02-16 | 2014-11-11 | Analog Devices, Inc. | Digital pre-distortion |
| EP2704318A4 (en) * | 2011-12-09 | 2015-04-29 | Ntt Docomo Inc | PRE-COUPLER AND CONTROL PROCEDURE FOR THE FORECASTER |
| WO2014004525A1 (en) * | 2012-06-27 | 2014-01-03 | Analog Devices, Inc. | Digital pre-distortion |
| US9344143B2 (en) * | 2012-07-24 | 2016-05-17 | Mediatek Inc. | Signal transmitting device and signal transmitting method |
| BR112016026017B1 (pt) * | 2014-05-27 | 2022-11-22 | Telefonaktiebolaget Lm Ericsson (Publ) | Método realizado por um nó de rádio, nó de rádio, e, portador |
| CN106533998B (zh) * | 2015-09-15 | 2020-03-06 | 富士通株式会社 | 非线性特性的确定方法、装置和系统 |
| KR101699755B1 (ko) * | 2015-12-30 | 2017-01-25 | 한국산업기술대학교산학협력단 | 진폭 변조를 위한 신호 처리 장치 |
| EP3476042B1 (en) * | 2016-06-24 | 2020-08-05 | Telefonaktiebolaget LM Ericsson (publ) | Transmitter architecture for massive-mimo |
| US10404322B2 (en) * | 2016-12-30 | 2019-09-03 | Google Llc | Powering electronic devices in a data center |
| KR102668217B1 (ko) * | 2019-03-11 | 2024-05-23 | 삼성전자주식회사 | 통신을 위한 주파수 대역을 제어하기 위한 방법 및 그 전자 장치 |
| US11304148B2 (en) * | 2019-09-27 | 2022-04-12 | Cypress Semiconductor Corporation | Methods for setting transmit power in wireless devices |
| US11764882B1 (en) * | 2022-06-13 | 2023-09-19 | Nxp Usa, Inc. | Pre-conditional calibration for third order intermodulation distortion (IMD3) cancellation |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55107308A (en) * | 1979-02-13 | 1980-08-18 | Nippon Telegr & Teleph Corp <Ntt> | Nonlinear compensation system of automatic following type |
| JP2002064340A (ja) * | 2000-08-14 | 2002-02-28 | Matsushita Electric Ind Co Ltd | 高周波電力増幅器 |
| JP2005244723A (ja) * | 2004-02-27 | 2005-09-08 | Ntt Docomo Inc | べき級数型プリディストータの制御方法及び装置 |
| JP2005294890A (ja) * | 2004-03-31 | 2005-10-20 | Hitachi Kokusai Electric Inc | 歪補償増幅器の調整方法 |
| JP2006164297A (ja) * | 2005-12-28 | 2006-06-22 | Sony Corp | 画像処理装置、画像処理方法、および、記録媒体 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3002995C2 (de) * | 1979-02-13 | 1983-09-29 | Nippon Telegraph & Telephone Public Corp., Tokyo | Anpassbares Entzerrungssystem |
| US6298096B1 (en) * | 1998-11-19 | 2001-10-02 | Titan Corporation | Method and apparatus for determination of predistortion parameters for a quadrature modulator |
| US6590449B2 (en) * | 2000-05-30 | 2003-07-08 | Matsushita Electric Industrial Co., Ltd. | Predistortion circuit, low-distortion power amplifier, and control methods therefor |
| JP2002057533A (ja) | 2000-05-30 | 2002-02-22 | Matsushita Electric Ind Co Ltd | 前置歪み補償回路、低歪み電力増幅器、及びその制御方法 |
| JP3564382B2 (ja) | 2000-10-24 | 2004-09-08 | 松下電器産業株式会社 | プリディストーション歪み補償回路 |
| JP4033794B2 (ja) * | 2003-03-24 | 2008-01-16 | 株式会社エヌ・ティ・ティ・ドコモ | 高効率線形電力増幅器 |
| CN100576724C (zh) * | 2005-05-18 | 2009-12-30 | 株式会社Ntt都科摩 | 幂级数型前置补偿器及其控制方法 |
| JP4344367B2 (ja) * | 2005-06-06 | 2009-10-14 | 株式会社エヌ・ティ・ティ・ドコモ | 多周波帯用べき級数型プリディストータ |
-
2009
- 2009-09-01 JP JP2009201241A patent/JP5060532B2/ja not_active Expired - Fee Related
- 2009-09-07 KR KR1020090083807A patent/KR101150734B1/ko not_active Expired - Fee Related
- 2009-09-08 US US12/555,420 patent/US7948311B2/en not_active Expired - Fee Related
- 2009-09-08 EP EP09011496.8A patent/EP2164171B1/en not_active Not-in-force
- 2009-09-10 CN CN2009101728867A patent/CN101674054B/zh not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55107308A (en) * | 1979-02-13 | 1980-08-18 | Nippon Telegr & Teleph Corp <Ntt> | Nonlinear compensation system of automatic following type |
| JP2002064340A (ja) * | 2000-08-14 | 2002-02-28 | Matsushita Electric Ind Co Ltd | 高周波電力増幅器 |
| JP2005244723A (ja) * | 2004-02-27 | 2005-09-08 | Ntt Docomo Inc | べき級数型プリディストータの制御方法及び装置 |
| JP2005294890A (ja) * | 2004-03-31 | 2005-10-20 | Hitachi Kokusai Electric Inc | 歪補償増幅器の調整方法 |
| JP2006164297A (ja) * | 2005-12-28 | 2006-06-22 | Sony Corp | 画像処理装置、画像処理方法、および、記録媒体 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012049735A (ja) * | 2010-08-25 | 2012-03-08 | Nippon Hoso Kyokai <Nhk> | デジタル信号の送信装置 |
| WO2012111583A1 (ja) * | 2011-02-18 | 2012-08-23 | 株式会社エヌ・ティ・ティ・ドコモ | べき級数型ディジタルプリディストータとその制御方法 |
| US8890134B2 (en) | 2012-07-06 | 2014-11-18 | Samsung Electronics Co., Ltd. | Organic photoelectric material and organic photoelectric device and image sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100060356A1 (en) | 2010-03-11 |
| US7948311B2 (en) | 2011-05-24 |
| EP2164171A3 (en) | 2011-05-18 |
| KR101150734B1 (ko) | 2012-06-11 |
| JP5060532B2 (ja) | 2012-10-31 |
| CN101674054A (zh) | 2010-03-17 |
| EP2164171B1 (en) | 2014-04-02 |
| KR20100030583A (ko) | 2010-03-18 |
| CN101674054B (zh) | 2012-07-11 |
| EP2164171A2 (en) | 2010-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5060532B2 (ja) | べき級数型プリディストータ、べき級数型プリディストータの制御方法 | |
| JP3857652B2 (ja) | 歪補償装置 | |
| JP5864176B2 (ja) | スプリアス放射打ち消しのためのシステムおよび方法 | |
| EP1425849B1 (en) | Calibration of an adaptive signal conditioning system | |
| US8686791B2 (en) | Amplifying apparatus and distortion compensation method | |
| US12028188B2 (en) | Digital predistortion with hybrid basis-function-based actuator and neural network | |
| CN101627551B (zh) | 可数字转换无线电信噪比优化 | |
| US7333561B2 (en) | Postdistortion amplifier with predistorted postdistortion | |
| JP5811929B2 (ja) | 無線装置、歪補償方法、及び歪補償プログラム | |
| US20050180527A1 (en) | Digital predistorter using power series model | |
| US20090054016A1 (en) | Apparatus and Method for Adaptive Cartesian Transmitter Linearization and Wireless Transmitter Employing the Same | |
| CN102195568A (zh) | 幂级数型数字预失真器及其失真补偿控制方法 | |
| JP3872726B2 (ja) | 送信増幅器 | |
| JP4976648B2 (ja) | プリディストータ | |
| US8525592B2 (en) | Power amplification device, transmitter, and power amplification control method | |
| JP5049562B2 (ja) | 電力増幅器 | |
| JP2011510524A (ja) | 歪み補償装置 | |
| JP2006270797A (ja) | 歪み補償装置及び歪み補償方法 | |
| JP6190635B2 (ja) | プリディストータ、プリディストータの制御方法 | |
| CN115529049B (zh) | 基于闭环的短波通信方法、装置、设备及可读存储介质 | |
| JP4755937B2 (ja) | 歪補償装置及び歪補償方法 | |
| KR101470817B1 (ko) | 복수의 비선형 증폭기에 대하여 단일 피드백 회로를 사용하는 전치보상 장치 및 방법 | |
| KR20120054369A (ko) | 메모리 다항식 모델을 이용하는 전치 왜곡 장치, 그것의 전치 왜곡 방법, 및 전치 왜곡 장치를 포함하는 시스템 | |
| KR101712752B1 (ko) | 전치왜곡 아날로그 빔 포밍 시스템 및 전치왜곡 방법 | |
| JP2006352635A (ja) | プリディストーション方式歪補償増幅装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110328 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120724 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120803 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150810 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5060532 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |