JP2010072821A - 扁平物品の自動払出装置における昇降装置駆動装置 - Google Patents
扁平物品の自動払出装置における昇降装置駆動装置 Download PDFInfo
- Publication number
- JP2010072821A JP2010072821A JP2008238070A JP2008238070A JP2010072821A JP 2010072821 A JP2010072821 A JP 2010072821A JP 2008238070 A JP2008238070 A JP 2008238070A JP 2008238070 A JP2008238070 A JP 2008238070A JP 2010072821 A JP2010072821 A JP 2010072821A
- Authority
- JP
- Japan
- Prior art keywords
- flat article
- movable table
- suction
- electric motor
- suction port
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Control Of Vending Devices And Auxiliary Devices For Vending Devices (AREA)
- Vending Machines For Individual Products (AREA)
Abstract
【解決手段】積み重ねた扁平物品を支持する昇降可能な可動テーブルが配置され、蓋体126によって一面を開閉可能な垂立貯留室、前記可動テーブルの上方に配置され、かつ、前記扁平物品に対して横方向に搬送する搬送装置、前記可動テーブルを前記搬送装置に接離するための昇降装置、前記昇降装置は、電気モータの正転又は逆転により昇降装置を介して前記可動テーブルを昇降させる扁平物品の自動払出装置において、前記昇降装置は前記電気モータとの間に伝達装置325を介して駆動連結され、前記伝達装置325は前記蓋体126の開放に連動して駆動連結を解除し、前記蓋体126の閉口に連動して駆動連結する扁平物品の自動払出装置における昇降装置駆動装置である。
【選択図】図12
Description
詳しくは、扁平物品の自動払出装置における昇降装置とその駆動装置の駆動を扁平物品の収納作業に連動して自動的に行えるようにした昇降装置駆動装置に関する。
その概要は、複数のカード体を積み重ねて収納するカセットと、前記カセット内の前記複数のカード体を載置して上下方向に移動可能な可動ベース及び前記可動ベースを上方に移動させるリフト駆動機構を含み、前記可動ベース上に載置したそれらカード体を上方に移送するリフト手段と、前記リフト手段によって移送される前記複数のカード体のうち最も上のカード体を吸着するための開口を有する吸引手段と、前記吸引手段に吸着されたカード体を吸着力に抗して払い出し方向に送り出す送り出し手段を備え、前記可動ベースが前記リフト手段に対して駆動連結及び連結解除可能となっているカード体の払い出し装置において、前記リフト駆動機構は電気モータ、前記電気モータの駆動軸によって回転される第1のギア機構、及び、前記可動ベースを上方に移動するための第2のギア機構を含み、前記第1のギア機構の前記第2のギア機構に対する噛み合い時における前記電気モータの回転によって前記可動ベースを上方に移動させ、及び、噛合解除時に前記可動ベースを下方向に移動可能にすることを特徴とするカード体の払出装置である(例えば、特許文献1参照)。
次いで、カセットの扉を開いて、可動ベースを手動にて押し下げることにより新たなカードの挿入空間を形成した後、カードを可動ベース上に積み上げる。
次いでカセットの扉を閉じた後、第1のギヤ機構と第2のギヤ機構を噛み合わせなければ再始動準備が終了しない
したがって、新たなカードを挿入できるようになるまで3ステップが必要であり、煩雑である問題がある。
また、第1のギヤ機構と第2のギヤ機構との噛み合いの解除をせずにカセットの扉を開いて可動ベースを押し下げようとしたり、第1のギヤ機構と第2のギヤ機構とを噛み合わせずにカード体の払出装置を再起動させる誤操作をする問題がある。
本発明の第2の目的は、カードを積み上げる積み上げ部の蓋の開閉に連動して可動ベースと電気モータとの駆動連結の断接する扁平物品の自動払出装置における昇降装置駆動装置を小型かる安価に提供することである。
積み重ねた扁平物品を支持する可動テーブル、前記可動テーブルが上下方向に昇降可能に配置され、蓋体によって一面を開閉可能な垂立貯留室、前記可動テーブルの上方に配置され、かつ、前記扁平物品に対して横方向に搬送する搬送装置、前記可動テーブルを前記搬送装置に接離するための昇降装置、前記昇降装置は、電気モータの正転又は逆転により昇降装置を介して前記可動テーブルを昇降させる扁平物品の自動払出装置において、前記昇降装置は前記電気モータとの間に伝達装置を介して駆動連結され、前記伝達装置は前記蓋体の開放に連動して駆動連結を解除し、前記蓋体の閉口に連動して駆動連結することを特徴とする扁平物品の自動払出装置における昇降装置駆動装置である。
当該可動テーブルは電動モータによって伝達装置を介して昇降装置が駆動され、当該昇降装置によって上方又は下方へ移動される。
伝達装置は前記蓋体の開放に連動して伝達連結が解除される。
換言すれば、電気モータに関係なく昇降装置、すなわち可動テーブルが上下動可能になる。
この状態において、手動で可動テーブルを下降させることができる。
また、蓋体を閉めることにより当該伝達装置が伝達連結される。
これにより、可動テーブルは電気モータによって駆動される昇降装置によって上下動される。
したがって、蓋体の開閉に連動して電気モータと昇降装置の間の伝達装置の駆動連結解除又は駆動連結がなされるので、作業が簡易化されると共に作業忘れを解消できる利点がある。
扁平物品は、当該可動テーブル上に載置され、可動テーブルの上方動によって吸引口に近づけられる。
吸引装置によって生成される吸引口から吸引空気流によって吸着された扁平物品は搬送装置によって横方向へ搬送され、払い出される。
可動テーブルは電気モータによって伝達装置を介して昇降装置が駆動され、当該昇降装置によって上方又は下方へ移動される。
伝達装置は貯留室の蓋体の開放に連動して伝達連結が解除される。
換言すれば、電気モータに関係なく昇降装置、すなわち可動テーブルが垂立貯留室内において上下動可能になる。
この状態において、手動で可動テーブルを下降させて扁平物品の収納空間を形成した後、扁平物品を可動テーブル上に載置する。
垂立貯留室の蓋体を閉めることにより当該伝達装置が伝達連結される。
これにより、可動テーブルは電気モータによって駆動される昇降装置によって上下動される。
したがって、蓋体の開閉に連動して電気モータと昇降装置の間の伝達装置の駆動連結解除又は駆動連結がなされるので、作業が簡易化されると共に作業忘れを解消できる利点がある。
この構成において、歯車を噛み合わせることにより駆動連結、歯車の噛み合いを外すことにより、伝達連結を解除できるので、簡単な構成により昇降装置を構成できるので、小型かつ安価にできる利点がある。
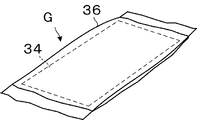
本実施例の自動払出装置102は、カードゲーム機用カードを内包した図14に示す扁平物品Gを払い出すために用いられる。
扁平物品の自動払出装置102は、払出部104と貯留部106を備える。
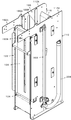
まず、本体110が図1、図3及び図4を参照して説明される。
本体110は、払出部104及び貯留部106を支持する機能を有し、板金等により構成される。
本体110は、所定の間隔で垂立する左右の第1サイドフレーム112A、第2サイドフレーム112B及びそれらを接続するリヤフレーム116、第1及び第2サイドフレーム112A、112Bの下部間を連結するミドルフレーム118及びボトムフレーム120を含んでいる。
第1サイドフレーム112A、第2サイドフレーム112B間の前側開口122は、第1及び第2サイドフレーム112A、112Bに両端部を支持された支軸124に下端部を回動自在に支持された蓋体126によって開閉自在に設定されている。
蓋体126は、施錠装置(図示せず)により施錠可能である。
本体110の上端に位置する矩形の上端開口128には払出部104が取付られ、その下方に垂立する立方体形空間である貯留部106が配置される。
払出部104はユニット化され、本体110の上端部にスクリュー(図示せず)により着脱可能に取り付けられている。
払出部104が故障した場合、別個の新しい払出部104に交換することにより、迅速に対処することができる。
払出部104は吸引装置132、第1横方向搬送装置134及び第2横方向搬送装置188を備える。
吸引装置132は、扁平物品Gを吸引気流によって吸着する機能を有している。
吸引装置132は、水平部132Hとその端部から垂直下方に伸びる垂下部132Vにより倒立L字形をした中空の箱体である吸引本体138を備えている。
水平部132Hの下壁137には第1吸引口138A及び第2吸引口138B、それら第1吸引口138A及び第2吸引口138Bの上側にそれぞれ連通した立方形空間の第1均し室140A及び第2均し室140B、第1均し室140A及び第2均し室140Bの横方向にそれぞれ連通した第1導通路142A、第2導通路142B及び第1導通路142A、第2導通路142Bに連通配置された吸引気流生成装置144を備える。
第1吸引口138A及び第2吸引口138Bは保留部106に積層保留されている扁平物品Gの搬送方向Dにおける長さの下流側の大凡半分に対し相対している。
第2吸引口138Bは、詳細には、搬送方向Dに対し直角をなす線上に並列配置された矩形の第1開口138B1及び第2開口138B2により構成されている。
これら第1開口138B1及び第2開口138B2は一体に形成することができる。
第1均し室140Aは、第1吸引口138Aと第2吸引口138Bとの間の下壁137と上壁139とを接続し、吸引本体144の幅方向に吸引本体144の幅の約四分の三の幅位置まで伸びる第1隔壁146A、第1隔壁146Aに対し第1サイドフレーム112A側の第1隔壁146Aから直角に搬送方向Dに対し反対方向へ伸びる第2隔壁146B、及び第1隔壁146Aの端部から第2隔壁146Bと平行に伸びる第3隔壁146Cにより画定された立方体形の空間である。
第1均し室140Aが所定の容積を有する場合、吸引力が時間の経過と共に変動した場合であっても、その容積がクッションになり、吸引力が急激に低下することによる扁平物品Gの落下を防止できる利点を有する。
第1導通路142Aは、第2隔壁146Bに連続し、第3隔壁146Cに近づく弧状の第4隔壁146D及び第4隔壁146Dに連続して第3隔壁146Cと平行に伸びる第5隔壁146Eにより画定される。
第2均し室140Bに連続して搬送方向Dに対し逆方向に、かつ、第1導通路142Aと平行に伸びる第2導通路142Bが形成される。
第2導通路142Bは、前壁148Aに連続して第2隔壁146Bと平行に伸びる左壁148B、第2隔壁146B、第4隔壁146D及び弟5隔壁146Eによって画定される。
第1導通路142A及び第2導通路142Bは、第1均し室140A及び第2均し室140Bと吸引気流生成装置144とを連通する機能を有する。
換言すれば、第1導通路142A及び第2導通路142Bの高さは、吸引気流生成装置144の三分の一程度であるが、垂直部132Vは吸引気流生成装置144の全面に相対しているので、吸引気流生成装置144の全吸引作用が第1導通路142A及び第2導通路142Bに及ぶ。
垂立壁146Vは吸引本体138に隣接している。
換言すれば、吸引気流生成装置144の半分は弟1導通路142Aに相対し、他の半分は第2導通路142Bに相対する。
詳述すれば、図7において吸引気流生成装置144の下側半分の吸引作用は第1導通路142Aを介して第1吸引口138Aにのみ及び、上側半分の吸引作用は第2導通路142Bを介して第2吸引口138Bにのみ及ぶ。
換言すれば、扁平物品Gが搬送方向Dに搬送され、その後端が第1吸引口138Aを外れた場合、第2吸引口138Bには吸引気流生成装置144の半分の吸引力が作用するので、扁平物品Gを継続して第2吸引口138Bに吸着できる利点がある。
第2均し室140B、第1均し室140A、第1導通路142A及び第2導通路142Bの上面は、板状の上壁139によって閉止されている。
上壁139に対し小隙間を開けて吸引本体138のカバ150が被せられている。
吸引気流生成装置144は、第1導通路142A、第2導通路142B、第1均し室140A、第2均し室140Bを介して第1吸引口138A及び第2吸引口138Bから空気を吸引する機能を有する。
吸引気流生成装置144は、例えば電動軸流ファン152である。
ファン153は、ほぼ水平の回転軸線周りに回転する第1電動モータ154によって回転される。
ファン153は、ケーシング156の円形孔158内に配置され、その回転軸線は垂立壁146Vの端面に相対する。
吸引気流生成装置144は、エジェクタ効果により吸引気流を生成する方式を採用することができる。
さらに、吸引気流生成装置144はエアモータにより軸流ファン152を回転させることができる。
第1導通路142Aはほぼ直線であるので流路損失は殆どなく、その吸引作用は第1均し室140Aに及ぶ。
第1均し室140Aの容積に対し第1吸引口138Aの面積は小さいため、第1吸引口138Aの全域に均一な負圧が生じる。
電動軸流ファン152の他の二分の一に生じる吸引作用は第2導通路142Bに作用する。
第2導通路142Bはほぼ直線に伸びた後、直角をなす第2均し室140Bに及ぶので、この直角部において流路損失を受けた吸引作用が第2均し室140Bに及ぶ。
第2均し室140Bの容積に対し第2吸引口138Bの面積は小さいため、第2吸引口138B(138B1及び138B2)の全域に均一な負圧が生じる。
これらにより、扁平物品Gの進行方向前側の大凡半分が第1吸引口138A及び第2吸引口138Bに吸着される。
しかし、第2吸引口138Bは全面が扁平物品Gによって覆われているので、電動軸流ファン152の吸引作用の二分の一が吸着力として作用する。
この二分の一の吸着力が扁平物品Gに作用している間に、扁平物品Gの先端は後述の第1挟持搬送装置194に挟まれる。
これにより、第2吸引口138Bの吸着力が低下した場合であっても、扁平物品Gは確実に送り出される。
第1横方向搬送装置134は、吸引装置132に吸着されている扁平物品Gを扁平物品Gの積み上げ方向に対し横方向に搬送し、次行程へ送り出す機能を有する。
第1横方向搬送装置134は、第1均し室140A及び第2均し室140B内に配置されている。
実施例において、第1横方向搬送装置134は、第1均し室138A内に配置した第1ローラ装置160及び第2均し室138B内に配置した第2ローラ装置162を含んでいる。
第2ローラ装置162は、右壁148B及び左壁148Cに回転自在に取り付けられた第2回転軸176に所定の間隔で取り付けられた第2ローラ178及び第3ローラ180により構成されている。
したがって、第1ローラ174の下部は、第1吸引口138Aの下端から、第2ローラ178の下端部は第2開口138B1の下端から、及び第3ローラ180の下部は第3開口138B2の下端から下方に僅かに突出している。
これにより、扁平物品Gが第1吸引口138A及び第2吸引口138Bに吸着された場合、第1吸引口138A及び第2吸引口138Bの下端と扁平物品Gとの間の僅かな隙間から空気が吸引される。
しかし、扁平物品Gの搬送間隔が大きい場合、下壁137と扁平物品Gとを接触させてもよい。
第1ローラ174、第2ローラ178及び第3ローラ180は、扁平物品Gとのスリップを少なくするため、周面がゴムで覆われている。
さらに、第1ローラ174は、扁平物品Gとの摩擦力を増すため、適宜間隔で凸部182が形成してある。
第1横方向搬送装置134は、ローラに代えて第2横方向搬送装置136に向かって移動するベルトを用いることができる。
第2横方向搬送装置136は、第1横方向搬送装置134から送られた扁平物品Gを払出口130に搬送する機能を有する。
第2横方向搬送装置136は、吸引装置132の側方に配置され、払出本体186及び第2搬送装置188を含んでいる。
まず、払出本体186を説明する。
払出本体186は、扁平物品Gを案内する機能、第2搬送装置188が装着される機能を有する。
払出本体186は第1本体186Aと第2本体186Bにより構成される。
第1本体186Aは、矩形箱形であって、第1サイドフレーム112A及び第2サイドフレーム112Bの上端から横方向に突出する取付部192A、192Bの間に挿入し、それらにスクリュウ(図示せず)により固定されている。
第2本体186Bは、立方体形であって、その後端は吸引装置132の前端に固定取り付けられた支軸193に回動自在に取り付けられ、第1本体186Aの真上に所定間隔、例えば扁平物品Gの三倍程度の隙間GPで配置されている。
換言すれば、第1本体186Aと第2本体186Bの間の薄板状の空間が扁平物品Gの搬送経路192である
第2搬送装置188は、第1横方向搬送措置134によって搬送方向Dに搬送された扁平物品Gを受け取って搬送経路192を搬送し、搬送経路192の端面である払出口130から払い出す機能を有する。
実施例において、第2搬送装置188は搬送経路192に沿って配置した第1挟持搬送装置194と第2挟持搬送装置196とを含んでいる。
第1挟持搬送装置194と第2挟持搬送装置196とは同一構成であるので、第1挟持搬送装置194を代表して説明する。
上ローラ装置198は、第2本体186Bに回転可能に支持されたシャフト204と、シャフト204に所定の間隔で固定されているローラ200A、200Bを含んでいる。
これらローラ200A、200Bの下部は、第2本体186に設けた開口206A、206Bから搬送経路192に突出している。
下ローラ装置202は、第1本体186Aに取付られた支軸208に回動自在に取付られたレバ212に回転自在に取り付けられたローラ214である。
レバ212はスプリング(図示せず)により相対するローラ200A、200Bに所定の圧力で接触するよう付勢されている。
第2挟持搬送装置196も同様に構成されている。
第1挟持搬送装置194と第2挟持搬送装置196との間の搬送経路192には、ピボット運動可能にシャッタ216が第1本体186Aに取り付けられている。
シャッタ216は、スプリング(図示せず)により図6において時計方向に付勢され、V字に接触された先端は、対面する上壁217の受入溝219に挿入されている。
しかし図示の状態よりも時計方向に回動されないようストッパ(図示せず)により規制され、搬送方向Dに搬送される扁平物品Gによって押されることにより反時計方向へピボット運動され、扁平物品Gが払出口130に向かって移動可能である。
第1フック218A及び第2フック218Bは、下向きチャンネル形に形成されたフック体220の下端部に形成されている。
フック体220は、第2本体186の先端部に下向きに被せられ、第2本体186Bの両側壁から突出する固定軸222に揺動自在に支持されると共にスプリング(図示せず)によって図5において反時計方向に付勢されている。
この付勢力により、第2本体186Bが第1本体186Aに対し正規位置に位置した状態において、第1フック218A及び第2フック218Bがサイドフレーム112A、112Bから横向きに突出する係止ピン224に係止される。
駆動装置221は、第1横方向搬送装置134及び第2横方向搬送装置136を駆動する機能、換言すれば、扁平物品Gを搬送方向Dに搬送する機能を有する。
駆動装置221は、第2電動モータ223、減速機224、第1傘歯歯車226、第2傘歯歯車228、回転軸232、及び第1伝動歯車列234及び第2伝動歯車列236を含んでいる。
減速機224は吸引本体138に並んで固定され、第2電動モータ223は減速機224に固定され、第1伝動歯車列234は吸引本体144の側面に配置されている。
したがって、駆動装置221は吸引装置132と一体に本体110に着脱可能である。
回転軸232の右壁148Bから突出する先端に第1平歯車238が固定され、第1回転軸172の先端に固定された第2平歯車242と噛み合っている。
第2平歯車242は、右壁148Bから横方向に突出する固定軸244に回転自在に取り付けた第3平歯車245に噛み合っている。
第3平歯車245は、第2回転軸176の先端に固定した第4平歯車246と噛み合っている。
第4平歯車246は、右壁148Bに固定された固定軸248に回転自在に支持された第5平歯車250に噛み合っている。
第1回転軸172と第2回転軸176の回転比は一対一であり、かつ第1ローラ174と第2ローラ178及び第3ローラ180の直径は同一であるので、同一速度で扁平物品Gを搬送する。
第2電気モータ223が所定の方向に回転した場合、減速機224、第1傘歯車226、第2傘歯車228、回転軸232、第1平歯車238、第2平歯車242及び第1回転軸172を介して第1ローラ174、さらに、第3平歯車245、第4平歯車246、第2回転軸176を介して第2ローラ178及び第3ローラ180が、図6において時計方向に回転される。
これにより、第1吸引口138A及び第2吸引口138Bに吸着されている扁平物品Gは搬送方向Dに搬送される。
第1伝動歯車列234は、第1平歯車238、第2平歯車242、第3平歯車245、第4平歯車246及び第5平歯車250によって構成される。
第2伝動歯車列236は、第2搬送装置188を駆動する機能を有する。
第2伝動歯車列236は、第5平歯車250に噛み合う支軸194の先端に回転自在に取付た弟6平歯車252、弟6平歯車252に噛み合う第2本体186Bの側壁に固定した固定軸254に回転自在に取り付けた弟7平歯車256、弟7平歯車256に噛み合う支軸258に回転自在に支持された弟8平歯車262、弟8平歯車262に噛み合う支軸264に回転自在に支持された弟9平歯車266、弟9平歯車266に噛み合う支軸268に回転自在に支持された弟10平歯車272、弟10平歯車272に噛み合う支軸274に回転自在に支持された弟11平歯車276及び弟11平歯車276に噛み合う回転軸222の先端に固定された弟12平歯車278により構成される。
第1伝動歯車列234は、吸引本体138に着脱可能に固定された弟1安全カバ236Aによって覆われ、第2伝動歯車列236は払出本体186に着脱可能に固定された第2安全カバ236Bによって覆われている。
ローラ200A、200B、206A及び206Bは同一径であるので原則同一速度で扁平物品Gは搬送される。
しかし、ローラ200A、200Bはローラ174と同様に所定間隔で周面に凸部182を形成することが好ましい。
第1横方向搬送装置134によって搬送された扁平物品Gを積極的に第2搬送装置188に受け取るためである。
第1伝動歯車列234及び第2伝動歯車列236をベルト駆動に変更できる。
しかし、ベルト伝動の場合、テンション調整等交換作業が面倒であるが、歯車の場合、同一部品を採用出来るのでコスト面、及びメンテナンス面で有利である。
これにより扁平物品Gは、まず第1横方向搬送装置134によって搬送方向Dに向かって搬送された後、第2搬送装置188の上ローラ200A、200Bと下ーラ214によって挟持され、ついで上ローラ206A、206Bと下ローラ200に挟持されて搬送され、払出口130から払い出される。
本実施例において検知装置204は、第1検知装置204A、第2検知装置204B及び第3検知装置204Cを含んでいる。
第1検知装置204Aないし第3検知装置204Cは、同一構成であるので、第1検知装置204Aを代表して説明する。
第1検知措置204AはU字形の接触片206A及び当該接触片206Aが押し上げられた場合「検知信号」を出力するセンサ部208Aを含んでいる。
第2検知装置204B及び第3検知装置204Cの対応する部分には同一数字にB又はCの符号を付してある。
第1検知装置204Aは、扁平物品Gが吸引装置132に吸着されたことを検知する機能を有する。
第1検知装置204Aのセンサ部208Aは下壁137に固定され、接触片206Aは第2ローラ装置162の第1吸引口138B1と第2吸引口138A1との間の下壁137に形成した第1スリット212Aから下方に突出している。
扁平物品Gが第1吸引口138A及び第2吸着口138Bに吸着された場合、扁平物品Gに接触片206Aが押し上げられて準備位置信号USを出力する。
第2検知装置204Bは扁平物品Gが第2横方向搬送装置136の第1挟持搬送装置194に挟持されたこと、及び第1挟持搬送装置194を通過したことを検知する機能を有する。
第2検知装置204Bは、センサ部208Bが第2本体186に固定され、接触片206Bは、上壁217の開口206A、206Bの間に形成された第2スリット212Bから下方に突出している。
第2検知装置204Bは、扁平物品Gが第1挟持搬送装置194に挟まれている間、接触片206Bが押し上げられ、センサ部208Bは「検知信号DS1」を出力する。
第2検知装置204Bが検知信号DS1を出力した後、当該検知信号DS2を出力しなくなった場合、扁平物品Gが第1挟持搬送装置194を通過したことを意味する。
第3検知装置204Cは、扁平物品Gが第2挟持搬送装置196に到達したこと及び通過したことを検知する機能を有する。
第3検知装置204Cは、センサ部206Cが第2本体186に固定され、接触片206Cは上壁217のローラ206Aと206Bとの間に形成された第3スリット212Cをから下方に突出している。
第3検知装置204Cは、扁平物品Gが第2挟持搬送装置196に挟まれている間、接触片206Cが押し上げられ、センサ部208Cは「検知信号DS2」を出力する。
第3検知装置204Cが検知信号DS2を出力した後、当該検知信号DS2を出力しなくなった場合、扁平物品Gが第2挟持搬送装置196を通過したことを意味する。
しかし、実施例のように接触片206を用いるメカニカルセンサを用いることにより、定期クリーニング等のメンテナンスを必要とせず、さらに安価である。
エンプティセンサ280は、可動テーブル292上に扁平物品Gがなくなったことを検知する機能を有する。
エンプティセンサ280は、光電式反射センサであって、吸引本体138に取り付けられ、可動テーブル292に向かって投光し、扁平物品Gからの反射光を受光することにより可動テーブル292上の扁平物品Gの有無を検知する。
可動テーブル292のエンプティセンサ280と相対する部位には開口282を設け、可動テーブル292から反射しないように構成してある。
貯留部106は、上下方向に延びる貯留室290と、扁平物品Gを移動させる可動テーブル292と、可動テーブル292の案内装置294及び移動装置296を備える。
貯留室290は、扁平物品Gを積み重ねて保留する機能を有する。
貯留室290は、第1及び第2サイドフレーム112A、112B、リヤフレーム116及び蓋体126により囲まれ、吸引装置132の下方において縦方向に伸び垂立する角柱状空間である。
なお、前述説明において蓋体126は施錠可能でないが、蓋体126を貯留室290を閉じた位置においてロック装置(図示せず)によって第1サイドフレーム112A又は第2サイドフレーム112Bに施錠可能に構成することができる。
扁平物品Gは、蓋体126を下部の支軸124を支点回動させて開いた後、可動テーブル292に上に積み上げる。
扁平物品Gを所定数積み上げた後、蓋体126を閉じる。
可動テーブル292は。扁平物品Gを載置して吸引装置132に近づけ、又は離隔する機能を有する。
可動テーブル292は、平面視した保留室290よりも一回り小さく、かつ、有底鍋形の立方体を倒立状態で貯留室290に挿入することにより構成されている。
可動テーブル292の上面である扁平物品Gの載置面300は平面である。
可動テーブル本体298は、貯留室290内の第1吸引口138A及び第2吸引口138Bの下方においてその前端から約半分の長さが相対する位置関係に配置されている。
案内装置294は、可動テーブル292が水平状態を保ったまま円滑に上下動するよう案内する機能を有する。
案内装置294は、可動テーブル292の前後方向位置決め用の第1案内装置294A、及び左右方向位置決め用の第2案内装置294Bを備えている。
まず第1案内装置294Aが説明される。
第1案内装置294Aは、可動テーブル292の扁平物品Gの搬送方向Dの前後方向に対する位置を規制する機能を有する。
第1案内装置294Aは、第1及び第2サイドフレーム112A、112B側に取り付けたガイドレール296及び可動テーブル292側に設けた被ガイド体302を含んでいる。
第1ガイドレール296A〜第4ガイドレール296Dは同一構成であるので、第1ガイドレール296Cを代表して説明する。
ガイドレール296Aは断面がアングル形であるが、中間二カ所にタブ状に取付部304A及び304Bが形成され、当該取付部304A、304Bの断面はクランク形である。
取付部304A、304Bは、第2サイドフレーム112Bのスリット306A、306Bを通って表面側に位置するので、スクリュウ308-Aによって固定される。
被ガイド体302はガイドレール296A及び296B又は296C及び296Dに案内される機能を有する。
被ガイド体302は、可動テーブル本体298に固定された第1支軸312A及び第2支軸312B及び第1支軸312Aの両端部に回転自在に取り付けた第1ローラ314A及び第3ローラ314C、第2支軸312Bの両端に回転自在に取り付けた第2ローラ314B及び第4ローラ314Dを含んでいる。
第1ローラ314Aはガイドレール296Aの背面316Aに案内され、第2ローラ314Bは第2ガイドレール296Bの前面316Bに案内される。
換言すれば、第1ローラ314Aおよび第2ローラ314Bは弟Iガイドレール296A及び第2ガイドレール296Bによって形成される仮想板状体の背面316A及び前面316Bによって案内され、及び第3ローラ314C及び第4ローラ314Dは第3ガイドレール396C及び第4ガイドレール296Dによって形成される仮想板状体の背面316C及び前面316Dによって案内されつつ上下動するので、ローラの低転がり抵抗を考慮した場合、円滑に、かつ、前後方向の位置が安定しつつ上下動する。
さらに、可動テーブル本体298の左右において案内されるので、一層安定して上下動する。
第2案内装置294Bは、可動テーブル292の左右方向の位置を安定させる機能を有する。
第2案内装置294Bは、可動テーブル本体298に取り付けた第5ローラ318A、第6ローラ318B、弟7ローラ318C及び弟8ローラ318D並びに第1サイドフレーム112A及び第2サイドフレーム112Bの内面を含んでいる。
弟5ローラ318A及び弟6ローラ318Bは可動テーブル本体298の左側外面から突出し、かつ回転自在に可動テーブル本体298に取付られ、第1サイドフレーム112Aの内面によって案内される。
弟7ローラ318C及び弟8ローラ318Dは可動テーブル本体298の右側外面から突出し、かつ回転自在に可動テーブル本体298に取り付けられ、第2サイドフレーム112Bの内面によって案内される。
換言すれば、可動テーブル本体298は、左側を第1サイドフレーム112Aに、右側を第2サイドフレーム112Bに案内されつつ上下動するので、ローラの低転がり抵抗をも手伝って、円滑に上下動することができる。
移動装置296は、可動テーブル292を上下方向に適宜移動させる機能を有する。
したがって、同一機能を有する他構造の装置変更することができる。
しかし、本実施例の装置を用いた場合、小型化、低コストに有利である。
移動装置296は、駆動装置320と昇降装置322を備える。
駆動装置320は、可動テーブル292を上下動させる駆動源である。
駆動装置320は、ミドルフレーム118とボトムフレーム120の間の空間に配置され、ブラケット323に固定された減速機324と、減速機324に固定され、かつ、減速機324を駆動する第3電気モータ326及び伝達装置325を含んでいる。
ブラケット323はボトムフレーム120に対し垂直な仮想平面内において回動できる。
伝達装置325は、減速機324の出力を昇降装置322に伝動する機能及び駆動連結及び駆動解除をする機能を有する。
伝達装置325は、減速機324の出力軸328に固定された駆動ギヤ332及び第1サイドフレーム112Aと第2サイドフレーム112B間のボトムフレーム120に固定されたチャンネルブラケット333に回転自在に支持された回転軸342と、回転軸342に固定され、駆動ギヤ332に噛み合う被動ギヤ334と、回転軸342の各サイドフレームから突出する先端に固定されたくピニオンギヤ344Aと344Bを有する。
したがって、駆動ギヤ332と被動ギヤ334とは歯車伝達装置335を構成する。
第3電気モータ326は、昇降装置322を介して可動テーブル292を吸引装置132に接近させたり、離したりする駆動源となる。
また、図11においてブラケット323が固定軸330を支点に時計方向に回転された場合、駆動ギヤ332は被動ギヤ334との噛み合いが解除、換言すれば駆動連結が解除される。
この状態(図12)からブラケット323が反時計方向に回転された場合、駆動ギヤ332は被動ギヤ334に噛み合う、換言すれば駆動連結される。
連動装置336は、ブラケット323から横向きに突出したピン337、ブラケット333から横向きに突出した固定ピン338、一端をピン337に回動自在に軸支すると共に中間の長孔338Hに固定ピン338がスライド自在に貫通するロッド339、蓋体126の下端に形成したカム340、及びロッド339の側面から横向きに突出する係止片341と固定ピン338との間に係止したスプリング343により構成される。
カム340は開口のため所定角度回動した場合、ロッド339の端部に形成したカムフォロワ345を押動し、ロッド339は図12において右方へ固定ピン338に案内されつつ移動する。
これにより、ブラケット323は時計方向へ回動され、前述のように駆動ギヤ332と被動ギヤ334との駆動連結が解除される。
蓋体126が閉口位置に戻された場合、カムフォロワ345はカム340によって押動されないので、ロッド339はスプリング343によって図12の位置から図11の位置へ移動される。
これに伴って、ブラケット323が反時計方向に回動されて駆動ギヤ322が被動ギヤ334に噛み合う。
歯先どうしが突きあわさった場合、第3電気モータ326の回動により歯先がずれることにより、噛み合わされる。
貯留室290の前側開口122が開口されている状態及び昇降装置322が正常作動可能でない状態での作動を防止するためである。
本実施例では、蓋体126が前側開口122の閉口位置にある場合、蓋体126と一体に回動する作用片348によって投射光が遮光される透過形光電センサが配置されている。
センサ347は、作用片348によって投射光が遮断され、受光部が投光部からの投射光を受光しない場合、閉口信号CSを出力する。
昇降装置322は、駆動装置320の正転及び逆転動によって可動テーブル292を上下運動させる機能を有する。
昇降装置322は、同一機能を有する他の装置に変更することができる。
昇降装置322は、第1サイドフレーム112Aに隣接配置された第1昇降装置322A及び第2サイドフレーム112Bに隣接配置される第2昇降装置322Bを含んでいる。
第1昇降装置322A及び第2昇降装置322Bは同一構成であるので、第2昇降装置322Bを代表して説明する。
まずフレキシブルラック352が図1を参照して説明される。
フレキシブルラック352の中間部は、ピニオンギヤ344Bに噛み合っている。
ピニオンギヤ344Bとの噛み合い部よりも上側のフレキシブルラック352は、ラックガイド354の中空部362にスライド可能に挿入され、ラック部364はラックガイド354の側面のスリット366から突出している。
フレキシブルラック352の上端には連結装置358が取り付けられ、ピニオンギヤ344Bよりも下側は収納案内体360内に挿入されている。
ラックガイド354は、柔軟性を有するフレキシブルラック352が座屈しないよう案内する機能を有する。
ラックガイド354は、その上端部と下端部がブラケット368により第2サイドフレーム112Bに沿ってほぼ垂直に固定されている。
ラックガイド354の下端部に相対してピニオンギヤ344Bが配置されているので、フレキシブルラック352が逃げることなく、ピニオンギヤ344Bとの噛み合いを継続する。
連結装置358は、フレキシブルラック352と可動テーブル292とを連結する機能を有する。
連結装置358は、ステー372、連結具374(374A、374B)を含んでいる。
ステー372は、可動テーブル292からサイドフレーム112Bに形成した上下方向に伸びる長孔376を通して第2サイドフレーム112Bから突出している。
連結具374Bは、フレキシブルラック352の先端に固定された金具であり、嵌入孔378が形成されている。
嵌入孔378にステー372の先端が挿入されることにより、フレキシブルラック352と可動テーブル292とは一体移動する。
収納案内体360は、フレキシブルラック352の後端を案内する機能を有する。
フレキシブルラック352の後端部は、サイドフレーム112Bの側面にブラケット382により固定されたJ字状のパイプ384に挿入され、U形に上方に戻される。
フレキシブルなフレキシブルラック352を使用してJ字状に配置することにより、昇降装置322をコンパクトに構成でき、小型化に適している。
例えば、リニアモータのマグネットプレートを第2サイドフレーム112Bの側方に立設し、コイルプレートに可動テーブルを連結して移動装置296を構成してもよい。
主制御回路382は、例えばマイクロプロセッサであって、ROM384に記憶されたプログラムに基づいてCPU386がRAM388とデータをやり取りしながら所定の処理を行う。
すなわち、払出指示信号P及び第1検知装置204Aの上位置信号US、第1検知装置204B、第2検知信号204Cの検知信号DS1、DS2及びCSに基づいて、第1電気モータ154、第2電気モータ223、第3電気モータ326の作動を制御する。
作動に先立ち、蓋体126を開けて扁平物品Gを貯留室290に収納ずる。
換言すれば、可動テーブル292が最下位にない場合、可動テーブル292を作業者が押し下げ出来ない位置まで押し下げて扁平物品Gの収納空間を形成する。
蓋体126が所定角度傾けられた場合、カム340はカムフォロワ345を押動してロッド339を図11の位置から図12の位置へ移動させる。
これにより、ブラケット323が図12に示すように時計方向へ回動されて駆動ギヤ332と被動ギヤ334との噛み合いが外れる。
これにより、可動テーブル292はフレキシブルラック352、回転軸342、ピニオンギヤ344A、344B等の抵抗を受けるものの下方動が可能になるので、可動テーブル292は手動で最下まで押し下げられる。
この状態において作用片348はセンサ347から離れているので投射光を遮断せず、センサ347は閉口信号CSを出力できない。
可動テーブル292を押し下げた後、扁平物品Gを可動テーブル292上に所定量積み上げた後、蓋体126を閉じる。
これにより、作用片348は投射光を遮断するのでセンサ347は閉口信号CSを出力可能な状態である。
ます、ステップS1においてセンサ347が閉口信号CSを出力しているか判別される。
前述のように蓋体126が前面開口122を閉口している場合、センサ347は閉口信号CSを出力しているのでステップS2に進む。
開口信号CSが出力されない場合、ステップS3に進み、蓋体126の開口エラー信号を出力してステップS1をループする。
作業者が蓋体126をきちんと閉めることにより、センサ347は閉口信号CSを出力するのでステップS2に進む。
ステップS2において第1検知装置304Aが準備位置信号USを出力しているか判別する。
準備位置信号USを判別しない場合、ステップS3に進み、第3電気モータ226が正転させられた後、ステップS2へ戻る。
これにより、ピニオンギヤ344A、344Bは正転され、フレキシブルラック352が上方へ移動され、連結装置358を介して可動テーブル292が上昇される。
可動テーブル292の上昇により、最上位の扁平物品Gは第1検知装置204Aの接触片206Aを押し上げるので、第1検知装置204Aは準備位置信号USを出力する。
ステップS2において準備位置信号USを判別した場合、ステップS4に進む。
ステップS4において、第3電気モータ226を停止させ、ステップS5に進む。
ステップS5において、自動販売機の制御装置の払出指示信号Pが判別される。
払出指示信号Pが存在する場合、ステップS6に進み、移動装置296の第3電気モータ326が逆転される。
第3電気モータ226の回転により、減速機324等を介してピニオンギヤ344A、344Bが図1において反時計方向へ回転される。
この下方動によって、扁平物品Gにより押し上げられている接触片206Aは下方へ移動し、第1検知装置204Aは準備位置信号USの出力を停止する。
ステップS7において、この準備位置信号USの不存在を判別すると、ステップS8に進む。
この正転により、ピニオンギヤ344Bが図1において時計方向へ回転されるので、フレキシブルラック352が上方へ移動し、結果として可動テーブル292が上方へ移動される。
可動テーブル292の上方動により、扁平物品Gが上昇し、第1接触片206Aを押し上げ、第1検知装置204Aが準備位置信号USを出力する。
これにより可動テーブル292、したがって、最上位の扁平物品Gは、少なくとも第1吸引口138Aに位置する第1ローラ174及び第2吸引口138Bに位置する第2ローラ140A及び第3ローラ140Bの下面の僅か下に位置する。
換言すれば、最上位の扁平物品Gが、第1吸引口138A及び第2吸引口138Bの全面に相対し吸引気流によって必ず吸着される位置に位置する。
第1電気モータ154の回転により、電動軸流ファン152が回転され、第1導通路142A、第2導通路142B及び第1均し室140A、第2均し室140Bを介してそれぞれ第1吸引口138A及び第2吸引口138Bから吸い込む吸引気流が発生する。
この吸引気流によって、最上位の扁平物品Gが吸い上げられ、第1吸引口138A及び第2吸引口138Bに吸着される。
この状態において、扁平物品Gの上面と第1吸引口138A及び第2吸引口138Bとの間には、僅かな隙間があるのでその隙間から空気を吸引することにより、扁平物品Gに対する所定の吸着力を保持すると共に、気流を第1電気モータ154に作用させ、冷却する。
ステップS13において、第3電気モータ226が逆転される。
第3電気モータ226の逆転により、ピニオンギヤ344A、344Bが図1において反時計方向へ回転される。
これにより、フレキシブルラック352が下方へ移動されるので、可動テーブル292及び可動テーブル292上の、第1吸引口138A及び第2吸引口138Bに吸着されている扁平物品Gを除く扁平物品Gが緩速度で下降する。
この下方動によって、第1吸引口138A及び第2吸引口138Bに吸着されている扁平物品Gと可動テーブル292上の最上位の扁平物品Gとは、所定距離離れる。
したがって、吸着された扁平物品Gと密着していた下位の扁平物品Gは可動テーブル292の下降と共に下方へ移動し、吸着された扁平物品Gのみが、第1吸引口138A及び第2吸引口138Bに継続して吸着される。
この離隔に十分な時間ステップS14において計時された後、ステップS15に進む。
ステップS15において、第3電気モータ226の回転が停止された後ステップS16に進む。
これにより、吸着された扁平物品Gと可動テーブル292上の最上位の扁平物品Gとの離隔状態が保持される。
第2電気モータ223の回転により、第1伝動歯車列234を介して第1横方向搬送装置134の第1ローラ174及び第2ローラ178、第3ローラ180、及び第2伝動歯車列236を介して第2横方向搬送装置136のローラ200A、200Bが図6において時計方向へ回転される。
吸着された扁平物品Gは、第1ローラ174及び第2ローラ140A及び第3ローラ140Bとの摩擦接触によって図6において左横方向の搬送方向Dへ移動され、第2搬送装置188へ向かって送られる。
この過程において、扁平物品Gは、第1吸引口138Aとの相対面積が徐々に小さくなる。
換言すれば、第1吸引口138Aの開口面積が徐徐に増大し、扁平物品Gに対する吸着力が急激に低下する。
したがって、扁平物品Gは、その水平な姿勢を保ったまま横方向へ搬送される。
そして、扁平物品Gの先端が第2挟持搬送装置196の直前に達した場合、扁平物品Gの後部は第2吸引口138Bから外れ始め、扁平物品Gに対する吸着力が急減する。
換言すれば、扁平物品Gの後端部が第2吸引口138Bから外れた場合であっても、扁平物品Gは、第1挟持搬送装置194の上ローラ装置198及び下ローラ装置202に挟まれてほぼ水平状態に保持され、横方向に搬送され続ける。
そして、第2挟持搬送装置196に挟まれ、さらに横方向に搬送される。
この途上において、扁平物品Gの先端部はシャッタ216を反時計方向へ回動させて通過する。
扁平物品Gの後端が第1挟持搬送装置194を通過したとき、第1接触片206Bが下方へ移動し、第2検知装置204Bは検知信号DS1を出力しなくなる。
ステップS17において、検知信号DS1が出力されていない判別をしたとき、ステップS18に進む。
ステップS18において、第1電気モータ154及び第2電気モータ223が停止される。
すなわち、吸引装置132が停止し、吸引装置132の吸引機能が停止する。
また、第1横方向搬送装置134及び第2横方向搬送装置136が停止する。
すなわち、最上位の扁平物品Gが第1接触片206Aを押し上げているか判定する。
もし、第1検知装置204Aが準備位置信号USを出力している場合、ステップS20に進み第3電気モータ326が逆転される。
すなわち、最上位の扁平物品Gが払い出された後、次の最上位の扁平物品Gが第1接触片206Aを押し上げている場合、最上位の扁平物品Gが吸引装置132の慣性運転により吸着され、かつ、第1横方向搬送装置134の慣性運動により払出口130へ搬送される恐れがある。
可動テーブル292、したがって、扁平物品Gを前記のように下降させることにより、扁平物品Gが吸引装置132によって吸着されないようにし、不要な払い出しを回避する。
ステップS21において、第2検知装置204Bが検知信号DS1を出力した後出力しなくなったか判別し、判別しない場合ステップS22に進み所定時間経過したか判別し、経過しない場合ステップS21に戻る。
所定時間経過しても信号変化がない場合、扁平物品Gが第2横方向搬送装置136においてジャムし、異常状態であると判別してステップS25において異常信号を出力した後、処理を終了する。
ステップS23において、第3検知装置204Cの検知信号DS2が出力された後、出力されなくなったか判別する。
検知信号DS2がないと判別しない場合、ステップS24に進んで所定時間経過したか判別し、経過しない場合ステップS23に戻る。
所定時間経過しても信号変化がない場合、扁平物品Gが第2横方向搬送装置136においてジャムしたものと判別してステップS25に進み、異常信号を出力した後、処理を終了する。
ステップS26において、第3電気モータ226が正転され、可動テーブル292が上昇された後、ステップS27に進む。
S28において第3モータ226が停止され処理を終了する。
これにより、最上位の扁平物品Gが第1吸引口138A及び第2吸引口138Bに対して最適な間隔を確保されて次の払出指示信号Pを待つ。
さらに、電動軸流ファン152の排気流を吸着される扁平物品Gとその下の扁平物品Gとの間に吹き込んで分離気流として利用することができる。
104 吸引装置
126 蓋体
134、136 搬送装置
138A,138B 吸引口
290 貯留室
292 可動テーブル
322 昇降装置
326 電気モータ
325 伝達装置
Claims (3)
- 積み重ねた扁平物品(G)を支持する可動テーブル(292)、
前記可動テーブルが上下方向に昇降可能に配置され、蓋体(126)によって一面を開閉可能な垂立貯留室(290)、
前記可動テーブルの上方に配置され、かつ、前記扁平物品に対して横方向に搬送する搬送装置(134、136)、
前記可動テーブルを前記搬送装置に接離するための昇降装置(322)、
前記昇降装置は、電気モータ(326)の正転又は逆転により昇降装置を介して前記可動テーブルを昇降させる扁平物品の自動払出装置において、
前記昇降装置は前記電気モータとの間に伝達装置(325)を介して駆動連結され、前記伝達装置は前記蓋体の開放に連動して駆動連結を解除し、前記蓋体の閉口に連動して駆動連結することを特徴とする扁平物品の自動払出装置における昇降装置駆動装置。 - 積み重ねた扁平物品(G)を支持する可動テーブル(292)、前記可動テーブルが上下方向に昇降可能に配置され、蓋体によって一面を開閉可能な垂立貯留室(290)、前記可動テーブルの上方に配置され、かつ、前記扁平物品に面する吸引口(138A,、138B)、前記吸引口を介して空気を吸引することにより前記積み重ねた最上位の扁平物品を吸着する吸引装置(104)、前記吸引口に吸着された前記扁平物品を前記積み重ね方向に対して横方向に搬送する搬送装置(134、136)、
前記可動テーブルを前記搬送装置に接離するための昇降装置(322)、
前記昇降装置は、電気モータ(326)の正転又は逆転により昇降装置を介して前記可動テーブルを昇降させる扁平物品の自動払出装置において、
前記昇降装置は前記電気モータとの間に伝達装置(325)を介して駆動連結され、前記伝達装置は前記蓋体の開放に連動して駆動連結を解除し、前記蓋体の閉口に連動して駆動連結することを特徴とする扁平物品の自動払出装置における昇降装置駆動装置。 - 請求項2の扁平物品の自動払出装置における昇降装置駆動装置において、
前記伝達装置は歯車伝達装置(335)であり、一対の歯車の噛み合い及び非噛み合いによって伝動連結及び解除をするようにしたことを特徴とする。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008238070A JP5294056B2 (ja) | 2008-09-17 | 2008-09-17 | 扁平物品の自動払出装置における昇降装置駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008238070A JP5294056B2 (ja) | 2008-09-17 | 2008-09-17 | 扁平物品の自動払出装置における昇降装置駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010072821A true JP2010072821A (ja) | 2010-04-02 |
| JP2010072821A5 JP2010072821A5 (ja) | 2011-09-22 |
| JP5294056B2 JP5294056B2 (ja) | 2013-09-18 |
Family
ID=42204556
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008238070A Active JP5294056B2 (ja) | 2008-09-17 | 2008-09-17 | 扁平物品の自動払出装置における昇降装置駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5294056B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105701912A (zh) * | 2016-03-30 | 2016-06-22 | 上海米泉自动售货机有限公司 | 一种用于自动售货机的推送装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6431473U (ja) * | 1988-07-27 | 1989-02-27 | ||
| JPH01176733A (ja) * | 1988-01-06 | 1989-07-13 | Toshiba Corp | 給紙装置 |
| JP2006190366A (ja) * | 2005-01-05 | 2006-07-20 | Asahi Seiko Kk | 扁平物品の自動払出装置 |
-
2008
- 2008-09-17 JP JP2008238070A patent/JP5294056B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01176733A (ja) * | 1988-01-06 | 1989-07-13 | Toshiba Corp | 給紙装置 |
| JPS6431473U (ja) * | 1988-07-27 | 1989-02-27 | ||
| JP2006190366A (ja) * | 2005-01-05 | 2006-07-20 | Asahi Seiko Kk | 扁平物品の自動払出装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105701912A (zh) * | 2016-03-30 | 2016-06-22 | 上海米泉自动售货机有限公司 | 一种用于自动售货机的推送装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5294056B2 (ja) | 2013-09-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6478185B2 (en) | Tablet vessel feed apparatus | |
| CN102431808B (zh) | 药品托盘供给装置 | |
| JP6167907B2 (ja) | 薬剤カセット | |
| CN106395439B (zh) | 卡供送设备 | |
| JP2006190366A (ja) | 扁平物品の自動払出装置 | |
| JP5294056B2 (ja) | 扁平物品の自動払出装置における昇降装置駆動装置 | |
| JP2010072821A5 (ja) | ||
| JP5239035B2 (ja) | 扁平物品の自動払出装置 | |
| JP6597836B2 (ja) | 薬剤シート回動装置および薬剤シート回動方法 | |
| JP2010072802A5 (ja) | ||
| JP4772633B2 (ja) | 給紙装置 | |
| JP5456601B2 (ja) | バケットリフタ | |
| JP2019094148A (ja) | 袋体ストッカー及び袋体供給方法 | |
| JP2006298387A (ja) | トレイ供給装置 | |
| JP5566589B2 (ja) | 紙葉類収納カセットおよび紙葉類載置台 | |
| JP2013193879A (ja) | カード類の送出し装置 | |
| JP4726024B2 (ja) | 育苗容器段積取出装置 | |
| JP4157640B2 (ja) | 排紙収納装置 | |
| JP2006056688A (ja) | シート状物供給装置 | |
| JP2020011784A (ja) | 紙類取扱装置及び紙類取扱装置を備える印刷機 | |
| JP2009095408A (ja) | 遊技媒体貯留装置 | |
| JP2009107847A (ja) | シート状商品の自動払出装置におけるシート状商品の自動払出方法 | |
| JPH07187421A (ja) | カード送り出し装置 | |
| JP2003040218A (ja) | 袋載置装置 | |
| JP2007331916A (ja) | 用紙収納装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110804 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130311 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20130430 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130529 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130530 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5294056 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |