JP2010052915A - 電波発信器の位置認識装置及び位置認識システム - Google Patents
電波発信器の位置認識装置及び位置認識システム Download PDFInfo
- Publication number
- JP2010052915A JP2010052915A JP2008221005A JP2008221005A JP2010052915A JP 2010052915 A JP2010052915 A JP 2010052915A JP 2008221005 A JP2008221005 A JP 2008221005A JP 2008221005 A JP2008221005 A JP 2008221005A JP 2010052915 A JP2010052915 A JP 2010052915A
- Authority
- JP
- Japan
- Prior art keywords
- radio wave
- wave transmitter
- recognition
- tag
- attribute information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 claims description 25
- 238000003384 imaging method Methods 0.000 claims description 4
- 230000002708 enhancing effect Effects 0.000 abstract 1
- 230000008569 process Effects 0.000 description 14
- 230000007246 mechanism Effects 0.000 description 8
- 239000006096 absorbing agent Substances 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000006247 magnetic powder Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
- H01Q1/22—Supports; Mounting means by structural association with other equipment or articles
- H01Q1/2208—Supports; Mounting means by structural association with other equipment or articles associated with components used in interrogation type services, i.e. in systems for information exchange between an interrogator/reader and a tag/transponder, e.g. in Radio Frequency Identification [RFID] systems
- H01Q1/2216—Supports; Mounting means by structural association with other equipment or articles associated with components used in interrogation type services, i.e. in systems for information exchange between an interrogator/reader and a tag/transponder, e.g. in Radio Frequency Identification [RFID] systems used in interrogator/reader equipment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
- H01Q21/28—Combinations of substantially independent non-interacting antenna units or systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q3/00—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system
- H01Q3/02—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system using mechanical movement of antenna or antenna system as a whole
- H01Q3/04—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system using mechanical movement of antenna or antenna system as a whole for varying one co-ordinate of the orientation
Landscapes
- Warehouses Or Storage Devices (AREA)
Abstract
【解決手段】識別タグが配置された認識対象領域を撮影するCCDカメラと、識別タグから発信された電波を受信するアレイアンテナと、アレイアンテナからの受信出力に基づいて識別タグの位置を特定する受信位置特定手段と、識別タグの位置に基づいて撮影された画像上における識別タグの位置を特定する画像位置特定手段と、識別タグから発信された電波に含まれる識別情報及び属性情報を取得するタグリーダと、識別情報及び属性情報の中からアレイアンテナにて受信された電波に含まれる識別情報に対応する属性情報を取得する属性情報特定手段を備える。
【選択図】図1
Description
以下に添付図面を参照して、この発明に係る電波発信器の位置認識装置及び位置認識システムの一実施の形態を詳細に説明する。ただし、この実施の形態によって本発明が限定されるものではない。
最初に、本実施の形態に係る位置認識システムによる位置認識の概念について説明する。図1は位置認識の概念を示す説明図である。この位置認識システムでは、収納棚に収納された物品の位置を認識すると共に、当該物品の属性情報を取得することを目的とする。物品は、RFIDタグによって構成された識別タグが貼付されており、この識別タグには、当該識別タグを一意に識別するための識別情報と、当該識別タグが貼付された物品の属性情報(例えば、物品の大きさ、重量、所有者)を対応付けて構成された情報が、予め記憶されている。なお、以下の各処理の説明ではステップを「S」と略記する。
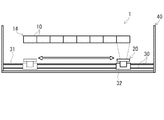
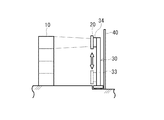
次に、本実施の形態に係る位置認識システムの構成を説明する。図2は位置認識システムの平面図、図3は図2の側面図、図4は図2の収納棚の要部斜視図である。位置認識システム1は、複数の収納棚10、これら複数の収納棚10の正面に配置された位置認識装置20、この位置認識装置20を移動させる移動機構30、及びこれら収納棚10や位置認識装置20を囲むように配置された電波吸収体40を備えて構成されている。
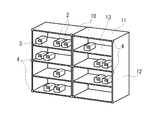
最初に、収納棚10の構成について説明する。収納棚10は、管理対象となる物品を収納する収納手段である。この収納棚10の具体的な構成な任意であるが、例えば、図4に示すように、上下一対の水平状の枠板11と左右一対の鉛直状の枠板12とを組み合わせて形成された枠体に、複数の水平状の棚板13を一定間隔を隔てて配置して構成されており、これら棚板13の上面に任意の物品2を載置することができる。ここでは、図2に示すように、このように構成された収納棚10を、鉛直状の枠板が隣接するように複数並設することによって収納列14が形成されている。
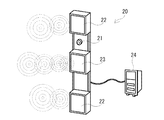
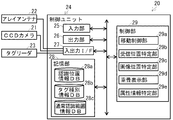
次に、位置認識装置20の構成について説明する。図5は位置認識装置20の斜視図、図6は位置認識装置20の電気的構成を示すブロック図である。位置認識装置20は、識別タグ3の位置を認識することにより、当該識別タグ3が貼付されている物品2の位置を認識するものであり、概略的には、CCDカメラ21、アレイアンテナ22、タグリーダ23、及び制御ユニット24を備える。なお、実際には、制御ユニット24を、有線又は無線にてパーソナルコンピュータの如き外部機器に接続し、制御ユニット24の機能の一部を、このパーソナルコンピュータ側で行うようにしてもよい。
次に、図2、3に示す移動機構30の構成について説明する。移動機構30は、位置認識装置20を移動するため移動手段であり、水平レール31、水平スライダ32、垂直レール33、及び垂直スライダ34を備える。水平レール31は、水平スライダ32を摺動可能とするための水平軌道を形成する一対のレールであり、収納列14の正面に配置されており、収納列14に沿って、かつ、収納列14の長手方向の全長に至るように敷設されている。水平スライダ32は、水平レール31に載置されており、この水平スライダ32における任意の位置に水平移動する。
次に、図2、3に示す電波吸収体40の構成について説明する。電波吸収体40は、外部からの電波が位置認識システムに入り込むことを防止し、あるいは、識別タグ3や位置調整用タグ4から送信された電波が位置認識システムの外部に漏洩することを防止する手段である。この電波吸収体40の具体的構成は任意であるが、例えば、フェライト等の磁性体粉末を樹脂に含有させて透磁損失によって電磁波減衰を図るものや、導電性物質を絶縁体に分散させて誘導損失により電波減衰を図るものを用いた板状体を、床面上に立設することで構成される。
次に、このように構成された位置認識システムにおける位置認識処理について説明する(以下の各処理の説明ではステップを「S」と略記する)。図10、11は位置認識処理のフローチャートである。なお、以下の説明では、位置認識装置20の位置調整を自動的に行う場合について説明するが、使用者が手動で調整することも可能であり、この場合には、移動機構30の制御に関する処理の全部又は一部を省略することもできる。
このように本実施の形態によれば、画像位置特定部29cにて位置が特定された識別タグ3の属性情報を属性情報特定部29eが特定することで、識別タグ3の位置のみならず、識別タグ3(又は識別タグ3が貼付された物品2)の属性情報を関連付けて認識でき、物品管理を目的とするシステムの実用性を高めることができる。
以上、本発明に係る一実施の形態について説明したが、本発明の具体的な構成及び手段は、特許請求の範囲に記載した各発明の技術的思想の範囲内において、任意に改変及び改良することができる。以下、このような変形例について説明する。
まず、発明が解決しようとする課題や発明の効果は、前記した内容に限定されるものではなく、本発明によって、前記に記載されていない課題を解決したり、前記に記載されていない効果を奏することもでき、また、記載されている課題の一部のみを解決したり、記載されている効果の一部のみを奏することがある。
図10、11に示したフローチャートは例示であり、各処理の内容やタイミングを変更することも可能である。例えば、タグリーダ23によるタグID及び属性情報の取得は、アレイアンテナ22による位置特定やCCDカメラ21による撮影の前段で行ってもよい。また、通常認識範囲に対する撮影範囲の位置合わせは、機械的手段等によって行うこともでき、この場合には、SA3〜SA6を省略してもよい。
2 物品
3 識別タグ
4 位置調整用タグ
10 収納棚
11、12 枠板
13 棚板
14 収納列
20 位置認識装置
21 CCDカメラ
22 アレイアンテナ
23 タグリーダ
24 制御ユニット
25 入力部
26 出力部
27 入出力IF
28 記憶部
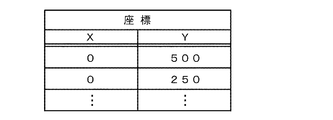
28a 認識位置情報DB
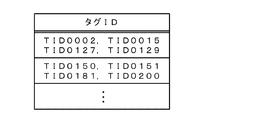
28b タグ種別情報DB
28c 通常認識範囲情報DB
29 制御部
29a 移動制御部
29b 受信位置特定部
29c 画像位置特定部
29d 重畳表示部
29e 属性情報特定部
30 移動機構
31 水平レール
32 水平スライダ
33 垂直レール
34 垂直スライダ
40 電波吸収体
Claims (4)
- 電波発信器が配置された認識対象領域を撮影する撮影手段と、
前記電波発信器から発信された電波を受信するアレイアンテナと、
前記アレイアンテナからの受信出力に基づいて、前記認識対象領域における前記アレイアンテナとの対向面上での前記電波発信器の位置を特定する受信位置特定手段と、
前記受信位置特定手段にて特定された前記電波発信器の位置に基づいて、前記撮影手段にて撮影された画像上における前記電波発信器の位置を特定する画像位置特定手段と、
前記電波発信器から発信された電波を受信し、当該電波に含まれる当該電波発信器の識別情報及び属性情報を取得する情報読取り手段と、
前記情報読取り手段にて取得された前記電波発信器の識別情報及び属性情報の中から、前記アレイアンテナにて受信された電波に含まれる前記電波発信器の識別情報に対応する属性情報を取得することにより、前記画像位置特定手段にて位置が特定された電波発信器の属性情報を特定する属性情報特定手段と、
を備えることを特徴とする電波発信器の位置認識装置。 - 前記画像位置特定手段にて前記電波発信器の位置を特定した後、
前記撮影手段は、前記画像位置特定手段にて特定された前記電波発信器の画像上において所定方法にて特定された位置を中心に、前記認識対象領域の拡大画像を撮影し、
前記画像位置特定手段は、前記撮影手段にて撮影された拡大画像上における前記電波発信器の位置を特定すること、
を特徴とする請求項1に記載の電波発信器の位置認識装置。 - 当該位置認識装置を、前記認識対象領域に沿って移動させる移動手段、
を備えたことを特徴とする請求項1又は2に記載の電波発信器の位置認識装置。 - 認識対象領域に配置された電波発信器の位置を認識するための位置認識システムであって、
前記請求項1から3のいずれか一項に記載の電波発信器の位置認識装置と、
前記認識対象領域において前記位置認識装置の最小認識範囲の周縁に対応する位置に設置された位置認識用の電波発信器とを備え、
前記位置認識装置は、前記位置認識用の電波発信器からの電波を当該位置認識装置に設けたアレイアンテナにて受信することにより当該位置認識用の電波発信器の位置を認識し、当該認識した位置認識用の電波発信器の位置に基づいて、前記認識対象領域に対する当該位置認識装置の認識範囲を特定すること、
を特徴とする電波発信器の位置認識システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008221005A JP5236398B2 (ja) | 2008-08-29 | 2008-08-29 | 電波発信器の位置認識装置及び位置認識システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008221005A JP5236398B2 (ja) | 2008-08-29 | 2008-08-29 | 電波発信器の位置認識装置及び位置認識システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010052915A true JP2010052915A (ja) | 2010-03-11 |
| JP5236398B2 JP5236398B2 (ja) | 2013-07-17 |
Family
ID=42069241
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008221005A Expired - Fee Related JP5236398B2 (ja) | 2008-08-29 | 2008-08-29 | 電波発信器の位置認識装置及び位置認識システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5236398B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014136559A1 (ja) * | 2013-03-04 | 2014-09-12 | 日本電気株式会社 | 物品管理システム、情報処理装置およびその制御方法と制御プログラム |
| EP3276742A1 (en) * | 2016-07-26 | 2018-01-31 | Toshiba TEC Kabushiki Kaisha | Tag reading device |
| KR20190114008A (ko) * | 2017-03-02 | 2019-10-08 | 마이크론 테크놀로지, 인크. | Rfid 디바이스의 실시간 위치 정보를 결정하기 위한 방법 및 장치 |
| JP2021042080A (ja) * | 2016-07-28 | 2021-03-18 | ボストン ダイナミクス,インコーポレイテッド | 在庫管理 |
| US10958593B2 (en) | 2017-03-02 | 2021-03-23 | Micron Technology, Inc. | Methods and apparatuses for processing multiple communications signals with a single integrated circuit chip |
| JP2021071296A (ja) * | 2019-10-29 | 2021-05-06 | 三菱電機ビルテクノサービス株式会社 | 無線タグ位置検出システム |
| JP2021082138A (ja) * | 2019-11-21 | 2021-05-27 | 東芝テック株式会社 | 情報処理装置、会計システム、及びプログラム |
| JP2021086162A (ja) * | 2019-11-25 | 2021-06-03 | 東芝テック株式会社 | 情報処理装置、情報処理システム、およびプログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004175509A (ja) * | 2002-11-27 | 2004-06-24 | Nec Corp | 物品所在管理装置 |
| JP2004342007A (ja) * | 2003-05-19 | 2004-12-02 | Nippon Telegr & Teleph Corp <Ntt> | 物品検索システム |
| JP2007200035A (ja) * | 2006-01-26 | 2007-08-09 | Ntt Docomo Inc | 無線タグ読取システムおよび方法 |
| JP2007297181A (ja) * | 2006-04-28 | 2007-11-15 | Nec Corp | Rfidタグ認識システム、rfidタグ認識方法、及びrfidタグ認識方法を実行するプログラム |
-
2008
- 2008-08-29 JP JP2008221005A patent/JP5236398B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004175509A (ja) * | 2002-11-27 | 2004-06-24 | Nec Corp | 物品所在管理装置 |
| JP2004342007A (ja) * | 2003-05-19 | 2004-12-02 | Nippon Telegr & Teleph Corp <Ntt> | 物品検索システム |
| JP2007200035A (ja) * | 2006-01-26 | 2007-08-09 | Ntt Docomo Inc | 無線タグ読取システムおよび方法 |
| JP2007297181A (ja) * | 2006-04-28 | 2007-11-15 | Nec Corp | Rfidタグ認識システム、rfidタグ認識方法、及びrfidタグ認識方法を実行するプログラム |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014136559A1 (ja) * | 2013-03-04 | 2014-09-12 | 日本電気株式会社 | 物品管理システム、情報処理装置およびその制御方法と制御プログラム |
| US10438084B2 (en) | 2013-03-04 | 2019-10-08 | Nec Corporation | Article management system, information processing apparatus, and control method and control program of information processing apparatus |
| US11527054B2 (en) | 2013-03-04 | 2022-12-13 | Nec Corporation | Article management system, information processing apparatus, and control method and control program of information processing apparatus |
| US10885374B2 (en) | 2013-03-04 | 2021-01-05 | Nec Coporation | Article management system, information processing apparatus, and control method and control program of information processing apparatus |
| EP3276742A1 (en) * | 2016-07-26 | 2018-01-31 | Toshiba TEC Kabushiki Kaisha | Tag reading device |
| JP7118123B2 (ja) | 2016-07-28 | 2022-08-15 | ボストン ダイナミクス,インコーポレイテッド | 在庫管理 |
| JP2021042080A (ja) * | 2016-07-28 | 2021-03-18 | ボストン ダイナミクス,インコーポレイテッド | 在庫管理 |
| US11055657B2 (en) | 2017-03-02 | 2021-07-06 | Micron Technology, Inc. | Methods and apparatuses for determining real-time location information of RFID devices |
| KR102252835B1 (ko) * | 2017-03-02 | 2021-05-20 | 마이크론 테크놀로지, 인크. | Rfid 디바이스의 실시간 위치 정보를 결정하기 위한 방법 및 장치 |
| US10958593B2 (en) | 2017-03-02 | 2021-03-23 | Micron Technology, Inc. | Methods and apparatuses for processing multiple communications signals with a single integrated circuit chip |
| CN110383910A (zh) * | 2017-03-02 | 2019-10-25 | 美光科技公司 | 用于确定rfid装置的实时位置信息的方法及设备 |
| KR20190114008A (ko) * | 2017-03-02 | 2019-10-08 | 마이크론 테크놀로지, 인크. | Rfid 디바이스의 실시간 위치 정보를 결정하기 위한 방법 및 장치 |
| US11677685B2 (en) | 2017-03-02 | 2023-06-13 | Micron Technology, Inc. | Methods and apparatuses for processing multiple communications signals with a single integrated circuit chip |
| US11783287B2 (en) | 2017-03-02 | 2023-10-10 | Micron Technology, Inc. | Methods and apparatuses for determining real-time location information of RFID devices |
| JP2021071296A (ja) * | 2019-10-29 | 2021-05-06 | 三菱電機ビルテクノサービス株式会社 | 無線タグ位置検出システム |
| JP7325297B2 (ja) | 2019-10-29 | 2023-08-14 | 三菱電機ビルソリューションズ株式会社 | 無線タグ位置検出システム |
| JP2021082138A (ja) * | 2019-11-21 | 2021-05-27 | 東芝テック株式会社 | 情報処理装置、会計システム、及びプログラム |
| JP2021086162A (ja) * | 2019-11-25 | 2021-06-03 | 東芝テック株式会社 | 情報処理装置、情報処理システム、およびプログラム |
| JP7345367B2 (ja) | 2019-11-25 | 2023-09-15 | 東芝テック株式会社 | 情報処理装置、情報処理システム、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5236398B2 (ja) | 2013-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5236398B2 (ja) | 電波発信器の位置認識装置及び位置認識システム | |
| US10373389B2 (en) | Mobile terminal and method of operating thereof | |
| US10091429B2 (en) | Mobile terminal having two cameras and method for storing images taken by two cameras | |
| CN107959788B (zh) | 移动终端及其操作方法 | |
| US20180055326A1 (en) | Robot cleaner and a system including the same | |
| US10594927B2 (en) | Mobile terminal and operating method thereof | |
| US10175736B2 (en) | Touch panel and a wireless input apparatus and mobile terminal including touch panel | |
| US9454301B2 (en) | Mobile terminal controlled by at least one touch and method of controlling therefor | |
| KR20170079198A (ko) | 이동 단말기 및 그의 동작 방법 | |
| KR20170013555A (ko) | 이동단말기 및 그 제어방법 | |
| KR20160119990A (ko) | 이동 단말기 및 그 제어 방법 | |
| KR20180037923A (ko) | 이동단말기 및 그 제어방법 | |
| CN107948394A (zh) | 移动终端 | |
| KR20180046462A (ko) | 이동 단말기 | |
| KR20180095197A (ko) | 이동단말기 및 그 제어방법 | |
| KR20180038445A (ko) | 이동 단말기 | |
| KR102565391B1 (ko) | 이동 단말기 및 그의 동작 방법 | |
| KR20150109597A (ko) | 터치 패널, 이동 단말기 그리고 무선 입력장치 | |
| KR20180049629A (ko) | 스타일러스 펜을 이용한 터치 입력 장치 및 그의 터치 검출 방법 | |
| JP2006040059A (ja) | 対象物情報取得装置、対象物認証装置、及びそれらの制御方法 | |
| CN109154711A (zh) | 相机模块和及其自动对焦的方法 | |
| KR20170041098A (ko) | 이동 단말기 및 그의 동작 방법 | |
| JP6794242B2 (ja) | 無線通信装置、及び改札機 | |
| KR20180041430A (ko) | 이동 단말기 및 그의 동작 방법 | |
| KR20170074371A (ko) | 이동 단말기 및 그 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110624 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130311 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130313 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130327 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5236398 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160405 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |