JP2010051804A - 測定シーケンスを形式的に記述して測定シーケンスのプログラミングを自動化するための磁気共鳴シーケンスモデル - Google Patents
測定シーケンスを形式的に記述して測定シーケンスのプログラミングを自動化するための磁気共鳴シーケンスモデル Download PDFInfo
- Publication number
- JP2010051804A JP2010051804A JP2009198798A JP2009198798A JP2010051804A JP 2010051804 A JP2010051804 A JP 2010051804A JP 2009198798 A JP2009198798 A JP 2009198798A JP 2009198798 A JP2009198798 A JP 2009198798A JP 2010051804 A JP2010051804 A JP 2010051804A
- Authority
- JP
- Japan
- Prior art keywords
- block
- sequence
- measurement
- directed graph
- measurement sequence
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/543—Control of the operation of the MR system, e.g. setting of acquisition parameters prior to or during MR data acquisition, dynamic shimming, use of one or more scout images for scan plane prescription
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/546—Interface between the MR system and the user, e.g. for controlling the operation of the MR system or for the design of pulse sequences
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- High Energy & Nuclear Physics (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
【解決手段】磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を形式的に記述するために、有向グラフ(G)として表現可能なシーケンスモデルが構成され、このシーケンスモデルがワープブロック(W)、Xブロック(X)、休止(B)の群から成るブロックに基づいており、有向グラフ(G)が少なくとも、Xブロック(X)、入口点(I)および出口点(O)から成る群で形成されたノードと、エッジ(Ka)と、有向グラフ(G)を経過制御するためのエッジ(Ka)の性質とを含み、決定されるべき多数のパラメータに至るまで測定シーケンスが有向グラフ(G)から自動的にパラメータ化可能である。
【選択図】 図6
Description
磁気共鳴スキャナで実行する測定シーケンスを形式的に記述する方法、
MRスキャナで実行する測定シーケンスを自動的に作成する方法、
測定シーケンスを形式的に記述する方法および/または磁気共鳴スキャナで実行する測定シーケンスを自動的に作成する方法がコンピュータで実行されるとき、この方法を実現するコンピュータプログラム製品(コンピュータプログラを記録したコンピュータ読み取り可能な記録媒体)、
磁気共鳴スキャナで実行する測定シーケンスを自動的に作成するシステム
によって解決される。
・入口点からパスコントロールを介してワープブロックおよびそこからXブロックへの移行部、
・Xブロックからパスコントロールを介して出口点への移行部、
・Xブロックからパスコントロールを介してワープブロックおよびそこからXブロックへの移行部、
・Xブロックからパスコントロールおよび休止を介してワープブロックおよびそこからXブロックへの移行部、
・Xブロックから時間測定を介してXブロックへの移行部
から成る群によって与えられている。
・コントラスト設定。これは、得られる磁気共鳴画像のコントラストを決定する例えばT1コントラスト、T2コントラスト、脂肪抑制等の条件のことである。
・画像分解能設定。これは、1つの断層について希望する分解能から明らかとなるような設定のことである。例えば頭蓋冠近傍の頭部内で複数の断層を撮影する場合、断層当り有意な面積は頭蓋冠に近づけば近づくほどますます小さくなり、最後には1点に収斂する。つまり、例えば解剖学的構造から生じるこのような画像分解能設定を考慮するのがまったく有意義である。こうして所要の記憶場所も、相応する分解能を作成するのに必要とされる傾斜強さも、適合することができる。他の設定は、1つの画像で撮影されねばならない少なくとも1つの断層についての位置設定である。つまり、身体内でこの画像が撮影される場所が重要な役割を演じる。そのことは一般に診断上の問題提起のみから既に明らかとなる。
・ハードウェア制約は、例えば傾斜増幅器に関しても傾斜の勾配急峻度に関しても許容負荷サイクルから生じる。というのも、特定限界値を上まわってはならず、もしくは過度に急峻な勾配は出力増幅器の過負荷を生じるであろうからである。
・測定時間の最小化は、患者の画像を極力短時間で得ることが望ましいので、他の1つの代表的境界条件である。これは特に、拍動する心臓の検査、またはいわゆる息止め撮影、つまり患者が息を止めての撮影にあてはまる。こうして、この目的のために測定シーケンスを実行しなければならない画像撮影時間についてまったく明白な最大値が設定されている。その点をまったく別としても、上で既に述べたように測定時間の最小化のための経済的モチベーションも当然にある。
・患者安全設定。これは例えば、過度に急峻な傾斜の結果であり得る末梢神経刺激のリスクから生じる。このような末梢神経刺激は、患者四肢の意図しない動きを生じるので、患者にとって不快である。さらに、患者の意図しない動きは、得られる画像がその場合不鮮明となるのでMR画像の撮影を著しく損なうことがある。さらに、患者が受ける高周波出力が特定限界値を上まわってはならない。というのも、さもないと患者が火傷するからである。組織固有の吸収率に関するこのような限界値は予め定められており、例えば体重1キログラム当り4ワットの範囲内である。
傾斜のみが活性であるワープブロックWと、
傾斜と合わせて高周波パルスが送信されおよび/またはデータが受信される非ワープブロックと
の2つの異なる型を有するブロックで表すと望ましいことが判明した。
Xブロックを実行するには、スピンに1つの位相を、しかも予め定められたように印加し、さらに傾斜について、確定された開始振幅を明示する必要がある。これは、Xブロックの実行後には可能でない。
ワープブロックWを実行するにはワープブロックWの性質が既知でなければならない。同様に、ワープブロックの傾斜の初端振幅と終端振幅が既知でなければならない。これはシーケンスプログラマにも、測定シーケンス100を実行するソフトウェアにもあてはまる。両方の場合において、傾斜用ワープブロックWの終端振幅となり得るものを見出すために測定シーケンス100の将来のタイムスライスもしくはブロックを分析することは困難である。さらに、測定シーケンス100をサブシーケンス101に分割したい場合、サブシーケンス101の内部では、サブシーケンスの外側で何が起きるのか、または測定シーケンス100のグローバル時間軸t上でサブシーケンスの実行後に何が起きるのかはまったくわからない。それとは逆に、MRスキャナ4および/またはMRスキャナ4に接続された制御ユニット45で測定シーケンス100を実行するソフトウェアにとって、過去のブロックを検討し、最後に実行されたXブロックXの終端振幅を次のワープブロックWの開始振幅として求めることは簡単である。ワープブロックWの終端振幅は関連付けられたXブロックXの開始振幅によって与えられている。
Xブロック自体にとって、Xブロック後に何が起きるのかはまったく重要でなく、Xブロックが終了したならすべて片付いている。将来何が起きるのかをXブロックXは知る必要がない。
XブロックX後に傾斜モーメントを操作する理由は、傾斜モーメントのリワインディング、またはXブロックXに将来作用するスポイリング等のプロセスを促進することである。リワインディングとスポイリングは当業者には周知である。リワインディングとスポイリングは所要のモーメントを記憶することによって、またそれぞれ次のワープブロックWによって所要のモーメントが出されるようにすることによって、比較的簡単に達成される。
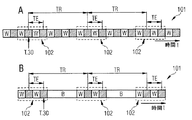
(1)XブロックXの持続時間。
(2)2つのXブロックXの中心間で測定されるシーケンス時間。このような時間の例は繰返し時間TR、エコー時間TE、反転時間TI、エコー間隔である。
(3)測定シーケンス100の内部の各第1ブロックXの中心の時点としてのシーケンス開始時間T.30。

入口点IからパスコントロールPを介してXブロックXに至る移行部。さらに、XブロックXからパスコントロールPを介して出口点Oに至る移行部。さらに、XブロックXからパスコントロールPを介してワープブロックWに、またそこからXブロックに至る移行部が許容されている。さらに、XブロックXからパスコントロールPおよび休止Bを介してワープブロックWに、そしてそこからXブロックXに至る移行部、最後にXブロックから時間測定を介してXブロックXに至る移行部である。
励起パルス、Tx-Excite
第1励起のためのワープブロック"ToExciteO"、Warp-ToExciteO
常時満たされるべきパスコントロール、"Always"
時間測定条件「常時」、SeqTimeCond-Always
45 制御ユニット
100 測定シーケンス
101 サブシーケンス
102 スーパーブロック
910 グラフ受入インタフェース
915 境界条件インタフェースモジュール
990 変換モジュール
1005 パラメータ化モジュール
1100 パラメータ
2000 ソルバー
2500 境界条件
3000 ユーザインタフェース
B 休止
ET 受信型
G 有向グラフ
I 入口点
Ka エッジ
O 出口点
P パスコントロール
ST 送信型
T.30 シーケンス開始時間
T.i タイミング値
X Xブロック
W ワープブロック
Claims (23)
- 磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を形式的に記述する方法であって、本方法が有向グラフ(G)として表現可能なシーケンスモデルで構成されており、
シーケンスモデルがワープブロック(W)、Xブロック(X)、休止(B)の群から成るブロックに基づいており、
有向グラフ(G)が少なくとも
Xブロック(X)、入口点(I)および出口点(O)から成る群で形成されたノードと、
エッジ(Ka)と、
有向グラフ(G)を経過制御するためのエッジ(Ka)の性質とを含み、
決定されるべき複数のパラメータ(1100)に至るまで測定シーケンス(100)が有向グラフ(G)から自動的にパラメータ化可能である
測定シーケンスを形式的に記述する方法。 - 経過制御するためのエッジ(Ka)の性質が、
・ワープブロック(W)、
・時間測定、
・休止(B)、
・パスコントロール(P)
から成る群によって与えられている請求項1記載の方法。 - ノード間のエッジ(Ka)が、
入口点(I)からパスコントロール(P)を介してワープブロック(W)およびそこからXブロック(X)に至る移行部と、
Xブロック(X)からパスコントロール(P)を介して出口点(O)に至る移行部と、
Xブロック(X)からパスコントロール(P)を介してワープブロック(W)およびそこからXブロック(X)に至る移行部と、
Xブロック(X)からパスコントロール(P)および休止(B)を介してワープブロック(W)およびそこからXブロック(X)に至る移行部と、
Xブロックから時間測定を介してXブロック(X)に至る移行部と
から成る群によって与えられている請求項1又は2記載の方法。 - 各Xブロック(X)が受信型(ET)および/または送信型(ST)のタイムスライスを表す請求項1ないし3の1つに記載の方法。
- 送信型(ST)のXブロック(X)が反転パルス、励起パルス、リフォーカスパルスまたは混合態様のいずれかを表す請求項4記載の方法。
- 有向グラフ(G)の内部でパスコントロール(P)の常時1つのみを満たしておくことができる請求項2ないし5の1つに記載の方法。
- 各時間測定が、
1つのXブロック(X)の持続時間と、
第2Xブロック(X)の中心間で測定されるシーケンス時間と、
1つの測定シーケンス(100)の内部で各第1Xブロック(X)の中心の時点としてのシーケンス開始時間(T.30)と
から成る群のうちの1要素である請求項2ないし6の1つに記載の方法。 - さらに、
有向グラフ(G)の各ブロック(X)についてインデックスを求めるステップと、
有向グラフ(G)から各ワープブロック(W)および各Xブロック(X)について変数を求めるステップと、
有向グラフ(G)から送信型(ST)および/または受信型(ET)の各Xブロック(X)の各中心について零次の傾斜モーメントを求めるステップと
を含む請求項1ないし7の1つに記載の方法。 - さらに、有向グラフ(G)からシーケンス方程式を求めるステップを含む請求項1ないし8の1つに記載の方法。
- さらに、有向グラフ(G)から、信型(ST)および/または受信型(ET)の各Xブロック(X)について、励起パルス、リフォーカスパルス、励起パルスおよびリフォーカスパルスからなる混合パルス、反転パルスのうちの少なくとも1つパルスの列としてエコー発生パスを求めるステップを含む請求項1ないし9の1つに記載の方法。
- さらに、有向グラフ(G)から送信型(ST)および/または受信型(ET)の各Xブロック(X)の各中心について一次の傾斜モーメントを求め、これにより測定シーケンス(100)内でフロー補償および/またはフローエンコーディングが印加可能であるステップを含む請求項1ないし10の1つに記載の方法。
- さらに、有向グラフ(G)から送信型(ST)および/または受信型(ET)の各Xブロックについて拡散重みを求めるステップを含む請求項1ないし11の1つに記載の方法。
- さらに、有向グラフ(G)から送信型(ST)および/または受信型(ET)の各Xブロック(X)のそれぞれ1つの中心について高次の傾斜モーメントを求めるステップを含む請求項1ないし12の1つに記載の方法。
- さらに、
1つの測定シーケンス(100)の内部でサブシーケンス(101)を求め、
求められたサブシーケンス(101)の内部で分割できないスーパーブロック(102)を識別し、分割できないスーパーブロック(102)が有向グラフ(G)の内部でシーケンス時間を介して結合されている請求項1ないし13の1つに記載の方法。 - 請求項1ないし14の1つに記載された測定シーケンス(100)を形式的に記述する方法に従ってパラメータ化されかつ有向グラフ(G)として存在するシーケンスモデルに基づいて磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を自動的に作成する方法であって、パラメータ化が、決定されるべき複数のパラメータ(1100)を含むものにおいて、
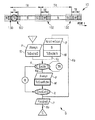
磁気共鳴スキャナ(4)で測定シーケンス(100)を実行するために満たされねばならない境界条件(2500)が用意されるステップと、
各ワープブロック(W)および/または各Xブロック(X)についてのタイミング値(T.i)と、決定されるべき複数のパラメータ(1100)用の許容値とが、ソルバー(2000)によって、境界条件(2500)を考慮して求められるステップと、
測定シーケンス(100)の形式記述が、磁気共鳴スキャナ(4)で実行可能なタイムスライスの列に自動的に変換されるステップと
を含む測定シーケンスの自動作成方法。 - さらに測定シーケンスをインターリーブ実行するために、
複数の測定シーケンスを用意するステップと、
複数の測定シーケンスのうち休止(B)を含む各第1つの測定シーケンスの内部で少なくとも1つのサブシーケンス(101)を識別するステップと、
各第1つの測定シーケンスの休止(B)中に、求められたサブシーケンスの少なくとも1つを重なりなしに実行できるように、複数の測定シーケンスのうちそれぞれ別の測定シーケンスからサブシーケンスを求めるステップとを含む請求項15記載の方法。 - 境界条件(2500)が、
コントラスト設定と、
画像分解能設定と、
少なくとも1つの断層用の位置設定と、
ハードウェア制約と、
測定時間の最小化と、
患者安全設定と
を含む群のうちの少なくとも1つの要素である請求項15又は16記載の方法。 - 形式的な記述を自動変換するステップがプログラム言語への変換を含み、測定シーケンス(100)が磁気共鳴スキャナ(4)でおよび/またはMRスキャナ(4)に接続された制御ユニット(45)で実行可能である請求項15ないし17の1つに記載の方法。
- 磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を形式的に記述する装置であって、この装置が、
ワープブロック(W)、Xブロック(X)、休止(B)の群から成るブロックに基づくシーケンスモデルを受け取るシーケンスモデルインタフェースと、
シーケンスモデルに基づいて測定シーケンス(100)を有向グラフ(G)として表現するモニタ(205)とを含み、
有向グラフ(G)が少なくとも、
Xブロック(X)、入口点(I)および出口点(O)から成る群で形成されたノードと、
エッジ(Ka)と、
有向グラフ(G)を経過制御するためのエッジ(Ka)の性質とを含み、
装置がさらに、シーケンスモデルから出発して、決定されるべき複数のパラメータ(1100)に至るまで有向グラフ(G)から測定シーケンス(100)を自動的にパラメータ化するパラメータ化モジュール(1005)を含む
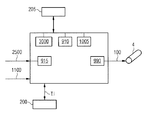
測定シーケンスを形式的に記述する装置。 - 磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を自動的に作成する装置であって、この装置が:
1つのシーケンスモデルから出発して請求項19記載の磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を形式的に記述する装置によって作成される有向グラフ(G)を受け取るグラフ受入インタフェース(910)と、
測定シーケンス(100)の実行時に選択的に満たされねばならない予め定められた境界条件(2500)を受け取る境界条件インタフェースモジュール(915)と、
境界条件(2500)を考慮して選択的に各ワープブロック(W)および/または各Xブロック(X)についてタイミング値(T.i)を求め、かつ決定されるべき複数のパラメータ(1100)についての許容値を求めるソルバー(2000)と、
磁気共鳴スキャナ(4)で実行する測定シーケンス(100)の形式的な記述を、磁気共鳴スキャナ(4)で実行可能なタイムスライスの列に自動的に変換する変換モジュール(990)と
を含む測定シーケンスの自動作成装置。 - 装置がさらに:
有向グラフ(G)から各Xブロック(X)についてインデックスを求めるインデキシングモジュール、
各ワープブロック(W)についておよび/または各Xブロック(X)について有向グラフ(G)から変数を決定する変数モジュール、
有向グラフ(G)からシーケンス方程式を求めるシーケンス方程式モジュール、
有向グラフ(G)から送信型(ST)および/または受信型(ET)の各Xブロック(X)についてエコー発生パスを、励起パルス、リフォーカスパルス、励起パルスおよびリフォーカスパルスからなる混合パルス、反転パルスのうちの少なくとも1つパルスの列として決定するエコー経路モジュール、
有向グラフ(G)から送信型(ST)および/または受信型(ET)の各Xブロック(X)の各中心について零次の傾斜モーメント、一次の傾斜モーメントおよび高次の傾斜モーメントのうちの少なくとも1つの傾斜モーメントを決定する傾斜モーメントモジュール、
有向グラフ(G)から送信型(ST)および/または受信型(ET)の各Xブロックについて拡散重みを求める拡散重みモジュール、
インターリーブ実行されるべき複数の測定シーケンスを受け取るインターリーブモジュール、
複数の測定シーケンスのうち休止(B)を含む各第1つの測定シーケンスの内部で少なくとも1つのサブシーケンス(101)を識別するサブシーケンス決定モジュール、
各第1つの測定シーケンスの休止(B)中に、求められたサブシーケンスの少なくとも1つを重なりなしに実行できるように、複数の測定シーケンスのうちそれぞれ別の測定シーケンスからサブシーケンスを求めるサブシーケンス算出モジュール、
のうちの少なくとも1つのモジュールを含む請求項20記載の装置。 - 磁気共鳴スキャナ(4)に接続された演算ユニットおよび/または磁気共鳴スキャナでプログラムが実行されるとき、請求項1ないし14の1つに記載された磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を形式的に記述する方法、および/または請求項15ないし18の1つに記載された磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を自動的に作成する方法を実現するコンピュータプログラム製品。
- 磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を自動的に作成するシステムであって、このシステムが、
測定シーケンス(100)を実行することのできる磁気共鳴スキャナ(4)と、
磁気共鳴スキャナ(4)のユーザと対話するためのユーザインタフェース(3000)と、
請求項19に記載された磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を形式的に記述する装置と、
請求項20または21に記載された磁気共鳴スキャナ(4)で実行する測定シーケンス(100)を自動的に作成する装置と
を含むシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102008044828A DE102008044828B3 (de) | 2008-08-28 | 2008-08-28 | Verwendung eines Magnetresonanz-Sequenzmodells zur formalen Beschreibung einer Messsequenz |
| DE102008044828.1 | 2008-08-28 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010051804A true JP2010051804A (ja) | 2010-03-11 |
| JP2010051804A5 JP2010051804A5 (ja) | 2012-09-20 |
| JP5627207B2 JP5627207B2 (ja) | 2014-11-19 |
Family
ID=41789222
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009198798A Expired - Fee Related JP5627207B2 (ja) | 2008-08-28 | 2009-08-28 | 測定シーケンスの作成方法、測定シーケンスの形式記述装置、測定シーケンスの自動作成方法および装置、コンピュータ読み取り可能な記録媒体、および測定シーケンスの自動作成システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8299789B2 (ja) |
| JP (1) | JP5627207B2 (ja) |
| CN (1) | CN101661087B (ja) |
| DE (1) | DE102008044828B3 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013192957A (ja) * | 2012-03-20 | 2013-09-30 | Siemens Ag | 磁気共鳴システム駆動制御シーケンスを求める方法、磁気共鳴システムを動作させる方法、磁気共鳴システムおよびコンピュータプログラム |
| JP2014155843A (ja) * | 2013-02-18 | 2014-08-28 | Siemens Aktiengesellschaft | 磁気共鳴装置用のパルスシーケンスを最適化するための方法、磁気共鳴装置用のパルスシーケンスを最適化するためのパルスシーケンス最適化装置、磁気共鳴装置ならびにコンピュータプログラム |
| CN104049545A (zh) * | 2013-03-13 | 2014-09-17 | 西门子公司 | 用于确定成像医学设备的优化测量序列的计算机运行方法 |
| CN112834543A (zh) * | 2020-04-28 | 2021-05-25 | 苏州纽迈分析仪器股份有限公司 | 基于脉冲梯度硬件结构的一维空间选层t2谱测试方法 |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE0702063L (sv) * | 2007-05-31 | 2009-01-13 | Colloidal Resource Ab | Metod, system, datoravläsbart medium och användning för magnetisk resonanstomografi |
| WO2009101871A1 (ja) * | 2008-02-12 | 2009-08-20 | Hitachi Medical Corporation | 磁気共鳴イメージング装置、初期状態生成方法、最適強度決定方法および磁気共鳴イメージング方法 |
| DE102008044827B3 (de) * | 2008-08-28 | 2010-04-08 | Siemens Aktiengesellschaft | Verfahren und Vorrichtung zum Erzeugen einer zeitrasterangepassten Messsequenz für einen Magnetresonanz-Scanner, die auf einem Zeitraster des Magnetresonanz-Scanners ausführbar ist |
| US9316578B2 (en) | 2008-10-30 | 2016-04-19 | New York University | Automated real-time particle characterization and three-dimensional velocimetry with holographic video microscopy |
| DE102010001092A1 (de) * | 2010-01-21 | 2011-07-28 | Siemens Aktiengesellschaft, 80333 | System mit zumindest einer medizinischen Bildgebungsvorrichtung für eine medizinische Bildgebung sowie Verfahren zu einer Vorbereitung einer Probe für eine medizinische Bildgebung |
| DE102013202548B4 (de) | 2013-02-18 | 2015-01-08 | Siemens Aktiengesellschaft | Ermittlung einer Pulssequenz für eine Magnetresonanzanlage auf Basis von k-Raum-Stützpunkten |
| US10670682B2 (en) | 2013-11-15 | 2020-06-02 | New York University | Parallel transmission by spin dynamic fingerprinting |
| ES2812611T3 (es) | 2014-02-12 | 2021-03-17 | Univ New York | Identificación rápida de características para el seguimiento holográfico y la caracterización de partículas coloidales |
| DE102014211586B3 (de) * | 2014-06-17 | 2015-10-22 | Siemens Aktiengesellschaft | Verwendung von Abhängigkeitsdatensätzen bei der Bereitstellung und/oder Überprüfung von MR-Messsequenzen |
| DE102014218530B4 (de) * | 2014-09-16 | 2024-11-14 | Siemens Healthineers Ag | Verfahren zum Betrieb einer Magnetresonanzeinrichtung, Magnetresonanzeinrichtung und Computerprogramm |
| WO2016077472A1 (en) | 2014-11-12 | 2016-05-19 | New York University | Colloidal fingerprints for soft materials using total holographic characterization |
| WO2016096623A1 (en) * | 2014-12-15 | 2016-06-23 | Koninklijke Philips N.V. | Spin echo mr imaging |
| DE102015205693A1 (de) | 2015-03-30 | 2016-10-06 | Siemens Healthcare Gmbh | Geschwindigkeitskompensierte diffusionssensibilisierte Diffusionsbildgebung |
| WO2017048960A1 (en) | 2015-09-18 | 2017-03-23 | New York University | Holographic detection and characterization of large impurity particles in precision slurries |
| DE102015223658B4 (de) * | 2015-11-30 | 2017-08-17 | Siemens Healthcare Gmbh | Verfahren zum Erfassen von Magnetresonanz-Signalen eines Untersuchungsobjekts |
| US11385157B2 (en) | 2016-02-08 | 2022-07-12 | New York University | Holographic characterization of protein aggregates |
| EP3446138B1 (en) * | 2016-04-20 | 2020-08-19 | Fraunhofer Gesellschaft zur Förderung der Angewand | System, method and computer program for determining a pulse sequence for a magnetic resonance scanner |
| US10670677B2 (en) * | 2016-04-22 | 2020-06-02 | New York University | Multi-slice acceleration for magnetic resonance fingerprinting |
| CN106447023B (zh) * | 2016-08-18 | 2019-03-05 | 常州大学 | 基于模体结构的大脑默认网络有向连接分析方法 |
| US10332628B2 (en) * | 2016-09-30 | 2019-06-25 | Sap Se | Method and system for control of an electromechanical medical device |
| DE102016221397A1 (de) | 2016-10-31 | 2018-05-03 | Siemens Healthcare Gmbh | Impulsantwort eines Gradientensystems einer Magnetresonanz-Anlage |
| DE102016222785A1 (de) * | 2016-11-18 | 2018-05-24 | Siemens Healthcare Gmbh | Bestimmung von Parametern für eine Magnetresonanzanlage |
| CN106780478B (zh) * | 2016-12-30 | 2020-06-09 | 苏州朗润医疗系统有限公司 | 获取同反相位图像的方法及磁共振成像系统 |
| US20190320934A1 (en) * | 2018-04-18 | 2019-10-24 | Siemens Healthcare Gmbh | Medical image acquisition with sequence prediction using deep learning |
| EP3594710B1 (en) * | 2018-07-09 | 2024-04-17 | Commissariat à l'Energie Atomique et aux Energies Alternatives | A computer-implemented method of building a database of pulse sequences for magnetic resonance imaging, and a method of performing magnetic resonance imaging using such a database |
| CN109431506B (zh) * | 2018-12-26 | 2022-07-05 | 上海联影医疗科技股份有限公司 | 医疗图像设备成像参数设置方法、装置、存储介质及设备 |
| EP3683594B1 (de) * | 2019-01-16 | 2023-09-06 | Siemens Healthcare GmbH | Verfahren zum betrieb einer magnetresonanzeinrichtung, magnetresonanzeinrichtung, computerprogramm und elektronisch lesbarer datenträger |
| US11543338B2 (en) | 2019-10-25 | 2023-01-03 | New York University | Holographic characterization of irregular particles |
| US11948302B2 (en) | 2020-03-09 | 2024-04-02 | New York University | Automated holographic video microscopy assay |
| EP3879293A1 (en) | 2020-03-11 | 2021-09-15 | Siemens Healthcare GmbH | Interleaved execution of mri measurement sequences |
| EP3973865A1 (en) * | 2020-09-29 | 2022-03-30 | Koninklijke Philips N.V. | Apparatus for optimising a sequence of magnetic resonance (mr) scans of a mr exam |
| US12260438B2 (en) * | 2022-03-31 | 2025-03-25 | Maplebear Inc. | Optical scanning using receipt imagery for automated tax reconciliation |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0630384A (ja) * | 1992-07-13 | 1994-02-04 | Sharp Corp | デジタル信号のサンプリング周波数変換装置 |
| JP2006341098A (ja) * | 2005-06-10 | 2006-12-21 | Siemens Ag | Mr画像における測定データ検出および画像再構成の改善 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4707661A (en) * | 1986-07-29 | 1987-11-17 | The Regents Of The University Of California | Machine generation of machine-executable state-change instructions for magnetic resonance imaging |
| US5144242A (en) * | 1990-08-23 | 1992-09-01 | The Regents Of The University Of California | Continually loadable microcode store for MRI control sequencers |
| JP3396490B2 (ja) * | 1992-03-31 | 2003-04-14 | 株式会社東芝 | 磁気共鳴映像装置 |
| US6249120B1 (en) | 1998-07-22 | 2001-06-19 | General Electric Company | Modular timemasking sequence programming for imaging system |
| US6166544A (en) * | 1998-11-25 | 2000-12-26 | General Electric Company | MR imaging system with interactive image contrast control |
| US6396266B1 (en) * | 1998-11-25 | 2002-05-28 | General Electric Company | MR imaging system with interactive MR geometry prescription control |
| US6275721B1 (en) * | 1999-06-10 | 2001-08-14 | General Electriccompany | Interactive MRI scan control using an in-bore scan control device |
| US7081750B1 (en) * | 2000-05-11 | 2006-07-25 | Fonar Corporation | Dynamic real-time magnetic resonance imaging sequence designer |
| WO2007121020A1 (en) * | 2006-04-13 | 2007-10-25 | Koninklijke Philips Electronics, N.V. | Background magnetic resonance imaging |
| DE102006034397B3 (de) * | 2006-07-25 | 2007-12-27 | Siemens Ag | Verfahren zum Erstellen und Ausführen einer Messsequenz für ein Magnet-Resonanz-Gerät sowie Magnet-Resonanz-Gerät und Computerprogramm |
| DE102006042998B4 (de) * | 2006-09-13 | 2008-07-03 | Siemens Ag | Messsequenz für die dreidimensionale MR-Bildgebung sowie MR-Gerät |
| DE102007022706B4 (de) | 2007-05-15 | 2009-08-20 | Siemens Ag | Verfahren, Vorrichtung und Computerprogrammprodukt zum Bestimmen des Messablaufs eines Magnetresonanz-Tomographiegeräts bei der Erstellung von Schnittbildern eines Objekts |
| US20080288443A1 (en) * | 2007-05-16 | 2008-11-20 | Darbie William P | Customizable Joint Type Assignment Method And Apparatus |
| DE102008044827B3 (de) * | 2008-08-28 | 2010-04-08 | Siemens Aktiengesellschaft | Verfahren und Vorrichtung zum Erzeugen einer zeitrasterangepassten Messsequenz für einen Magnetresonanz-Scanner, die auf einem Zeitraster des Magnetresonanz-Scanners ausführbar ist |
-
2008
- 2008-08-28 DE DE102008044828A patent/DE102008044828B3/de not_active Expired - Fee Related
-
2009
- 2009-08-28 JP JP2009198798A patent/JP5627207B2/ja not_active Expired - Fee Related
- 2009-08-28 US US12/549,460 patent/US8299789B2/en not_active Expired - Fee Related
- 2009-08-28 CN CN2009101710011A patent/CN101661087B/zh not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0630384A (ja) * | 1992-07-13 | 1994-02-04 | Sharp Corp | デジタル信号のサンプリング周波数変換装置 |
| JP2006341098A (ja) * | 2005-06-10 | 2006-12-21 | Siemens Ag | Mr画像における測定データ検出および画像再構成の改善 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013192957A (ja) * | 2012-03-20 | 2013-09-30 | Siemens Ag | 磁気共鳴システム駆動制御シーケンスを求める方法、磁気共鳴システムを動作させる方法、磁気共鳴システムおよびコンピュータプログラム |
| US9562958B2 (en) | 2012-03-20 | 2017-02-07 | Siemens Aktiengesellschaft | Determination of a magnetic resonance system activation sequence |
| JP2014155843A (ja) * | 2013-02-18 | 2014-08-28 | Siemens Aktiengesellschaft | 磁気共鳴装置用のパルスシーケンスを最適化するための方法、磁気共鳴装置用のパルスシーケンスを最適化するためのパルスシーケンス最適化装置、磁気共鳴装置ならびにコンピュータプログラム |
| CN104049545A (zh) * | 2013-03-13 | 2014-09-17 | 西门子公司 | 用于确定成像医学设备的优化测量序列的计算机运行方法 |
| JP2014176685A (ja) * | 2013-03-13 | 2014-09-25 | Siemens Aktiengesellschaft | コンピュータの作動方法 |
| CN112834543A (zh) * | 2020-04-28 | 2021-05-25 | 苏州纽迈分析仪器股份有限公司 | 基于脉冲梯度硬件结构的一维空间选层t2谱测试方法 |
| CN112834543B (zh) * | 2020-04-28 | 2024-05-14 | 苏州纽迈分析仪器股份有限公司 | 基于脉冲梯度硬件结构的一维空间选层t2谱测试方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102008044828B3 (de) | 2010-04-15 |
| JP5627207B2 (ja) | 2014-11-19 |
| US8299789B2 (en) | 2012-10-30 |
| CN101661087B (zh) | 2013-11-13 |
| US20100090694A1 (en) | 2010-04-15 |
| CN101661087A (zh) | 2010-03-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5627207B2 (ja) | 測定シーケンスの作成方法、測定シーケンスの形式記述装置、測定シーケンスの自動作成方法および装置、コンピュータ読み取り可能な記録媒体、および測定シーケンスの自動作成システム | |
| EP2713177B1 (en) | Medical imaging apparatus and control method thereof with classification and recommendation of protocols | |
| US10338176B2 (en) | Method and apparatus for actuation of a magnetic resonance scanner for the simultaneous acquisition of multiple slices | |
| US9507003B2 (en) | System and method for imaging of vascular structures using non-contrast enhanced magnetic resonance imaging | |
| US10191131B2 (en) | Medical imaging apparatus having multiple subsystems, and operating method therefor | |
| CN101661088B (zh) | 产生用于磁共振扫描器的时间光栅匹配的测量序列的方法 | |
| CN111223563B (zh) | 医用图像诊断装置以及医用图像诊断系统 | |
| CN110346741B (zh) | 使用多个脉冲序列类型的磁共振指纹的系统和方法 | |
| JP2016516502A (ja) | k空間サンプリング方法 | |
| US9465094B2 (en) | Method and magnetic resonance device for the automated classification of an image property of a magnetic resonance image | |
| US20170160366A1 (en) | System and method for magnetic resonance i maging with prospective motion control | |
| US10605877B2 (en) | System and method for chemical exchange saturation transfer (CEST) magnetic resonance fingerprinting | |
| US11313931B2 (en) | System and method for quantifying T1, T2 and resonance frequency using rosette trajectory acquisition and read segmented reconstruction | |
| Andria et al. | Acquisition times in magnetic resonance imaging: Optimization in clinical use | |
| JP4230875B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2024506631A (ja) | 医療画像の解析方法 | |
| US10877121B2 (en) | System and method for magnetic resonance fingerprinting with reduced acoustic noise | |
| KR101486777B1 (ko) | B1정보 획득 방법 및 장치 | |
| JPWO2016021440A1 (ja) | 磁気共鳴イメージング装置 | |
| JP2006021023A (ja) | 磁気共鳴診断装置 | |
| US20120314909A1 (en) | System and method for magnetic resonance angiography coordinated to cardiac phase using spin labeling | |
| JP2008055023A (ja) | 磁気共鳴イメージング装置 | |
| US20210106252A1 (en) | Magnetic resonance imaging apparatus and image processing apparatus | |
| US12352833B2 (en) | Medical data processing apparatus, medical data processing method, and magnetic resonance imaging apparatus | |
| US9235202B2 (en) | Variation of an MRI sequence parameter to minimize the variance of a measured value |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120806 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140902 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140930 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5627207 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |