JP2010023997A - 粒子輸送装置 - Google Patents
粒子輸送装置 Download PDFInfo
- Publication number
- JP2010023997A JP2010023997A JP2008188530A JP2008188530A JP2010023997A JP 2010023997 A JP2010023997 A JP 2010023997A JP 2008188530 A JP2008188530 A JP 2008188530A JP 2008188530 A JP2008188530 A JP 2008188530A JP 2010023997 A JP2010023997 A JP 2010023997A
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- particles
- linear electrodes
- phases
- particle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000002245 particle Substances 0.000 title claims abstract description 90
- 239000000758 substrate Substances 0.000 claims abstract description 19
- 238000010586 diagram Methods 0.000 description 12
- 238000000034 method Methods 0.000 description 6
- 230000005684 electric field Effects 0.000 description 5
- 238000007796 conventional method Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000005686 electrostatic field Effects 0.000 description 4
- 230000014759 maintenance of location Effects 0.000 description 2
- 230000003647 oxidation Effects 0.000 description 2
- 238000007254 oxidation reaction Methods 0.000 description 2
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
Images








Landscapes
- Non-Mechanical Conveyors (AREA)
Abstract
【解決手段】基板に形成された線状電極に対する印加電圧のパターンを時間経過に伴って周期的且つ断続的に切り替える。例えば6相の正弦波交流電圧をタイミングu=1〜15の繰り返しのうち、u=5,10,15のタイミングで幾つかの相の電圧を他の相の電圧に切り替える。これにより線状電極の配列空間上で粒子が滞留する特異点が生じることなく、粒子を高効率のもとで輸送できるようになる。
【選択図】図6
Description
図1はその斜視図、図2は側面図である。図1・図2に示すように、絶縁体2中に複数本の線状電極3を平行に配置して平板状固定子1を構成し、電源9で線状電極3に交番電圧を印加することにより、線状電極3の近傍にクーロン力を発生させ、平板状固定子1上の粒子29を平板状固定子1表面に吸引しつつ輸送する。
このことは以降に示す本発明の実施形態で述べる従来技術との比較説明で一層明らかになる。
(1) 互いに平行または略平行に配列された線状電極と、
前記線状電極の配列順番号をk(kは0から始まる整数)、前記線状電極に印加すべき周期変化する駆動電圧の採り得る位相の数である相数をnとしたとき、
p=Mod(k , n) (ここで、Modは剰余関数である。)
で表される第p相の駆動電圧を前記配列順番号kの線状電極に印加する電圧印加手段と、を備えた粒子輸送装置において、
前記駆動電圧はn相の交番電圧であり、前記電圧印加手段は前記線状電極に対する印加電圧のパターンが時間経過に伴って不連続に切り替えられたものとする。
この構成により、簡易な波形切替によって駆動できるので、回路構成が複雑化せず、駆動制御も容易になる。
この構成により、電極間の放電や電極からの放電を抑制することができ、また電極の酸化を抑制することができるので、長期に亘って安定した特性が維持できる。
この発明の第1の実施形態に係る粒子輸送装置について図3〜図9を参照して説明する。
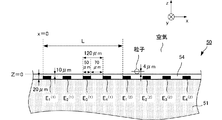
図3は複数の線状電極とそれらに対して電圧を印加する電源の構成を示す図であり、図3(A)は線状電極を形成した誘電体基板の平面図、図3(B)はその側面図である。
例えば、
(P1,P2,P3,P4,P5,P6) = (1,2,4,2,1,5)
であるとき、
(V1,V2,V3,V4,V5,V6)=(X1,X2,X4,X2,X1,X5)
となるように、接続される。

この発明の第1の実施形態に係る粒子輸送装置の格別な作用についての理解を助けるために、先ず従来の電圧印加方法による粒子の運動を、図7を参照して説明する。
従来の電圧印加方法とは、図6(A)に示したスイッチングパターンu=1の電圧出力を継続する場合に相当する。
次に、本発明の第1の実施形態による電圧印加方法を用いた場合の粒子の運動を、図8を参照して説明する。
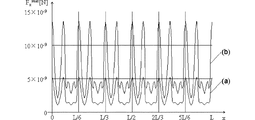
図8には、t=4T〜5Tにおいて粒子が受ける力のx成分Fx(x)の変化の様子をグラフとして描いた。これは、図6(A)に示したスイッチングパターンu=1〜15の繰り返しのうち、u=5(t=4T〜5T)におけるFx(x)について表したものである。図8は、その上から下へ向かって時間経過を表している。
さらに、
このように与えられるFmin-maxが大きいほど、留まる粒子の割合は小さいものと考えられる。
上記の従来方法(a)と本発明の第1実施形態(b)の場合について、
第1の実施形態では交流電圧の波形が正弦波であったが、第2の実施形態はこれを矩形波にした例である。
図10(A)は図5おけるスイッチングパターンテーブルの内容の例である。スイッチングパターン制御回路44は初期状態においてu=1に対応するPmを出力する。クロックパルスCLKが入力されるたびにu=2,3,4に対応するPmを出力する。図10(A)の場合、uの最大値は4であり、u=4の状態でクロックパルスCLKが入力されたときはu=1に戻る。
また、以上に示した例では相数をV1〜V6の6としたが、相数nは6に限らない。
41…クロック発生回路
42…6相交流電圧源
43…スイッチング回路
50…配列電極基板部
51…誘電体基板
52…線状電極
53…接続部
54…カバーコート
Claims (3)
- 互いに平行または略平行に配列された線状電極と、
前記線状電極の配列順番号をk(kは0から始まる整数)、前記線状電極に印加すべき周期変化する駆動電圧の採り得る位相の数である相数をnとしたとき、
p=Mod(k , n)+1 (ここで、Modは剰余関数である。)
で表される第p相の駆動電圧を前記配列順番号kの線状電極に印加する電圧印加手段と、を備えた粒子輸送装置において、
前記駆動電圧はn相の交番電圧であり、前記電圧印加手段は前記線状電極に対する印加電圧のパターンが時間経過に伴って不連続に切り替えられたものである粒子輸送装置。 - 前記電圧印加手段は、前記n相のうちの相の選択によって前記印加電圧のパターンの切替を行う、請求項1に記載の粒子輸送装置。
- 前記複数の線状電極は誘電体または絶縁体の基板上に配置され、前記線状電極上に絶縁体膜が被覆された請求項1または2に記載の粒子輸送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008188530A JP5262390B2 (ja) | 2008-07-22 | 2008-07-22 | 粒子輸送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008188530A JP5262390B2 (ja) | 2008-07-22 | 2008-07-22 | 粒子輸送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010023997A true JP2010023997A (ja) | 2010-02-04 |
| JP5262390B2 JP5262390B2 (ja) | 2013-08-14 |
Family
ID=41730169
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008188530A Expired - Fee Related JP5262390B2 (ja) | 2008-07-22 | 2008-07-22 | 粒子輸送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5262390B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6236222A (ja) * | 1985-08-06 | 1987-02-17 | Canon Inc | 粉体搬送装置 |
| JP2007248572A (ja) * | 2006-03-14 | 2007-09-27 | Ricoh Co Ltd | 静電搬送装置、現像装置、プロセスカートリッジ及び画像形成装置 |
-
2008
- 2008-07-22 JP JP2008188530A patent/JP5262390B2/ja not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6236222A (ja) * | 1985-08-06 | 1987-02-17 | Canon Inc | 粉体搬送装置 |
| JP2007248572A (ja) * | 2006-03-14 | 2007-09-27 | Ricoh Co Ltd | 静電搬送装置、現像装置、プロセスカートリッジ及び画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5262390B2 (ja) | 2013-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5874863B2 (ja) | 気流発生装置 | |
| KR20070043927A (ko) | 이온 생성 방법 및 장치 | |
| CN102135745A (zh) | 显影装置及其处理盒和图像形成设备 | |
| JP2014226003A (ja) | 振動発電器 | |
| JP5262390B2 (ja) | 粒子輸送装置 | |
| JP2006025578A (ja) | エレクトレットアクチュエータ | |
| JP2007287334A (ja) | イオナイザ | |
| US9504136B2 (en) | Inverter device, plasma generating device, sheet-member reforming device, and alternating-current voltage output method | |
| US10110146B2 (en) | Pulse-train drive system for electrostatic generators and motors | |
| JP2018087879A5 (ja) | ||
| JP2008172853A (ja) | 定在波型超音波アクチュエータの駆動方法およびその駆動装置 | |
| JPH07267363A (ja) | 可変ピッチ形粉体搬送装置 | |
| JP5205352B2 (ja) | 昇圧回路 | |
| JPH1184862A (ja) | 電界カーテン装置及び現像装置 | |
| JP2004055362A (ja) | プラズマ発生方法及びプラズマ発生装置 | |
| JP5326397B2 (ja) | 粒子輸送装置 | |
| KR20220065911A (ko) | 양방향 정전기력 및 전자기력을 이용한 액추에이터 | |
| KR20220065909A (ko) | 양방향 정전기력 및 전자기력을 이용한 액추에이터 | |
| JP5387023B2 (ja) | 粒子輸送装置 | |
| JP2009059590A (ja) | 除電装置 | |
| WO2010044304A1 (ja) | イオン発生器 | |
| JP5807743B2 (ja) | 発電装置、電子機器、移動手段及び発電装置の制御方法 | |
| US8537583B2 (en) | Load driver, image forming apparatus, load driving method, and computer program product | |
| JPH03253267A (ja) | 超音波モータ | |
| US8088638B1 (en) | MEMS DC to DC switching converter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110615 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130308 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20130308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130415 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5262390 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |