JP2010020872A - 情報記憶装置 - Google Patents
情報記憶装置 Download PDFInfo
- Publication number
- JP2010020872A JP2010020872A JP2008182958A JP2008182958A JP2010020872A JP 2010020872 A JP2010020872 A JP 2010020872A JP 2008182958 A JP2008182958 A JP 2008182958A JP 2008182958 A JP2008182958 A JP 2008182958A JP 2010020872 A JP2010020872 A JP 2010020872A
- Authority
- JP
- Japan
- Prior art keywords
- holding member
- head
- temperature change
- head holding
- collision
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 32
- 230000007423 decrease Effects 0.000 claims description 12
- 239000000463 material Substances 0.000 description 14
- 230000005415 magnetization Effects 0.000 description 10
- 230000035939 shock Effects 0.000 description 10
- 239000000758 substrate Substances 0.000 description 6
- 230000001965 increasing effect Effects 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 239000000725 suspension Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 238000009529 body temperature measurement Methods 0.000 description 1
- 230000010259 detection of temperature stimulus Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/48—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed
- G11B5/54—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head into or out of its operative position or across tracks
- G11B5/55—Track change, selection or acquisition by displacement of the head
- G11B5/5521—Track change, selection or acquisition by displacement of the head across disk tracks
- G11B5/5582—Track change, selection or acquisition by displacement of the head across disk tracks system adaptation for working during or after external perturbation, e.g. in the presence of a mechanical oscillation caused by a shock
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/02—Control of operating function, e.g. switching from recording to reproducing
- G11B19/04—Arrangements for preventing, inhibiting, or warning against double recording on the same blank or against other recording or reproducing malfunctions
- G11B19/046—Detection or prevention or problems due to temperature
Landscapes
- Moving Of Heads (AREA)
- Moving Of Head For Track Selection And Changing (AREA)
Abstract
【解決手段】筐体と、筐体内に設けられた、情報が記録される記録媒体と、記録媒体の表面に接触あるいは近接して記録媒体に対し情報再生及び又は情報記録を行うヘッドと、筐体内に設けられ、ヘッドを保持した、所定の軸の回りで回動可能な、軸の回りで回動することでヘッドを記録媒体に沿って移動させるヘッド保持部材と、ヘッド保持部材を駆動して軸の回りで回動させる駆動部と、軸の回りの回動でヘッド保持部材が衝突する位置に設けられた、ヘッド保持部材の回動範囲を制限する回動制限部材と、筐体内の温度変化を検知する温度変化検知部と、温度変化検知部の検知結果が、所定の変化幅に達する温度変化を示した場合に駆動部にヘッド保持部材を駆動させて回動制限部材に衝突させる駆動制御部とを備えた。
【選択図】図3
Description
筐体と、
上記筐体内に設けられた、情報が記録される記録媒体と、
上記記録媒体の表面に接触あるいは近接して該記録媒体に対し情報再生及び又は情報記録を行うヘッドと、
上記筐体内に設けられ、上記ヘッドを保持した、所定の軸の回りで回動可能な、該軸の回りで回動することで該ヘッドを上記記録媒体に沿って移動させるヘッド保持部材と、
上記ヘッド保持部材を駆動して上記軸の回りで回動させる駆動部と、
上記軸の回りの回動で上記ヘッド保持部材が衝突する位置に設けられた、該ヘッド保持部材の回動範囲を制限する回動制限部材と、
上記筐体内の温度変化を検知する温度変化検知部と、
上記温度変化検知部の検知結果が、所定の変化幅に達する温度変化を示した場合に上記駆動部に上記ヘッド保持部材を駆動させて上記回動制限部材に衝突させる駆動制御部とをを備えている。
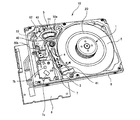
10 ハードディスク装置(HDD)
2 磁気ディスク
20 トラック
3 ヘッド
4 キャリッジアーム
40 軸
41 サスペンションアーム
42 コイル支持部
5 ボイスコイルモータ
50a 第1ストッパ
50b 第2ストッパ
51 ボイスコイル
52 ヨーク
53 永久磁石
6 ベース
7 内部基板
7a 温度センサ
7b ショックセンサ
8 制御基板
80 内部基板
81 制御回路
Claims (5)
- 筐体と、
前記筐体内に設けられた、情報が記録される記録媒体と、
前記記録媒体の表面に接触あるいは近接して該記録媒体に対し情報再生及び又は情報記録を行うヘッドと、
前記筐体内に設けられ、前記ヘッドを保持した、所定の軸の回りで回動可能な、該軸の回りで回動することで該ヘッドを前記記録媒体に沿って移動させるヘッド保持部材と、
前記ヘッド保持部材を駆動して前記軸の回りで回動させる駆動部と、
前記軸の回りの回動で前記ヘッド保持部材が衝突する位置に設けられた、該ヘッド保持部材の回動範囲を制限する回動制限部材と、
前記筐体内の温度変化を検知する温度変化検知部と、
前記温度変化検知部の検知結果が、所定の変化幅に達する温度変化を示した場合に前記駆動部に前記ヘッド保持部材を駆動させて前記回動制限部材に衝突させる駆動制御部とを備えたことを特徴とする情報記憶装置。 - 前記ヘッド保持部材が前記回動制限部材に衝突することで前記筐体内に生じる振動を検知する振動検知部と、
前記筐体内での歪みが前記ヘッド保持部材と前記回動制限部材との衝突で解放されたか否かを、前記振動検知部によって検知された振動を解析することで判定する歪み解放判定部とを備え、
前記駆動制御部が、前記解放判定部により未解放と判定された場合に、前記駆動部に前記ヘッド保持部材を再駆動させ先の衝突における回動速度よりも速い回動速度で前記回動制限部材に衝突するまで回動させるものであることを特徴とする請求項1記載の情報記憶装置。 - 前記駆動制御部は、前記温度変化検知部の検知結果が、所定の変化幅に達する温度変化を示した場合に、前記駆動部による前記ヘッド保持部材の駆動と前記回動制限部材への衝突とを複数回、共通の回動速度の下で実行させるものであり、
前記歪み解放判定部は、共通の回動速度の下で実行された複数回の衝突のうち先に実行された衝突で生じた振動の大きさが、後で実行された衝突で生じた振動の大きさよりも大きい場合に前記歪みが解放されたと判定するものであることを特徴とする請求項1または2記載の情報記憶装置。 - 前記温度変化検知部は、前記筐体内での歪みが前記ヘッド保持部材と前記回動制限部材との先の衝突で解放されてからの温度変化を検知するものであることを特徴とする請求項1から3のうちいずれか1項記載の情報記憶装置。
- 前記温度変化検知部は、前記筐体内での歪みが前記ヘッド保持部材と前記回動制限部材との先の衝突で解放されてからの温度変化を検知するものであり、
前記駆動制御部は、前記温度変化検知部の検知結果が、所定の上昇幅に達する温度上昇あるいは所定の下降幅に達する温度下降を示した場合に前記駆動部に前記ヘッド保持部材を駆動させて前記回動制限部材に衝突させるものであることを特徴とする請求項1から4のうちいずれか1項記載の情報記憶装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008182958A JP4959641B2 (ja) | 2008-07-14 | 2008-07-14 | 情報記憶装置 |
| US12/474,940 US7911729B2 (en) | 2008-07-14 | 2009-05-29 | Information storage apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008182958A JP4959641B2 (ja) | 2008-07-14 | 2008-07-14 | 情報記憶装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010020872A true JP2010020872A (ja) | 2010-01-28 |
| JP4959641B2 JP4959641B2 (ja) | 2012-06-27 |
Family
ID=41504920
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008182958A Expired - Fee Related JP4959641B2 (ja) | 2008-07-14 | 2008-07-14 | 情報記憶装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7911729B2 (ja) |
| JP (1) | JP4959641B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023140540A (ja) * | 2022-03-23 | 2023-10-05 | 株式会社東芝 | 磁気ディスク装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0536582A (ja) * | 1991-08-01 | 1993-02-12 | Olympus Optical Co Ltd | 位置決めステージ装置 |
| JP2007122798A (ja) * | 2005-10-27 | 2007-05-17 | Hitachi Global Storage Technologies Netherlands Bv | ディスク記憶装置及びその制御方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2998707A (en) * | 1960-03-22 | 1961-09-05 | Westinghouse Electric Corp | Control apparatus and method for heat pumps |
| CH488147A (de) * | 1968-03-15 | 1970-03-31 | Sulzer Ag | Zwanglaufdampferzeuger |
| JPH0828067A (ja) | 1994-07-18 | 1996-01-30 | Horinouchi:Kk | コンクリート構築物解体機およびその解体工法 |
| JP2002086329A (ja) * | 2000-09-13 | 2002-03-26 | Mori Seiki Co Ltd | 工作機械の熱変位補正量算出方法及び熱変位補正量算出装置 |
| JP2002298530A (ja) * | 2001-03-30 | 2002-10-11 | Toshiba Corp | 電源遮断時のヘッドリトラクト方法及び磁気ディスク装置 |
| KR100628588B1 (ko) * | 2003-02-21 | 2006-09-26 | 마츠시타 덴끼 산교 가부시키가이샤 | 모터 구동 장치, 공기 조화기, 냉장고, 극저온 냉동기,급탕기 및 휴대 전화 |
| JP2006179137A (ja) * | 2004-12-24 | 2006-07-06 | Hitachi Ltd | 光ディスク装置 |
-
2008
- 2008-07-14 JP JP2008182958A patent/JP4959641B2/ja not_active Expired - Fee Related
-
2009
- 2009-05-29 US US12/474,940 patent/US7911729B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0536582A (ja) * | 1991-08-01 | 1993-02-12 | Olympus Optical Co Ltd | 位置決めステージ装置 |
| JP2007122798A (ja) * | 2005-10-27 | 2007-05-17 | Hitachi Global Storage Technologies Netherlands Bv | ディスク記憶装置及びその制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4959641B2 (ja) | 2012-06-27 |
| US7911729B2 (en) | 2011-03-22 |
| US20100007982A1 (en) | 2010-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7289288B1 (en) | Disk drive having hybrid spindle speed control and related method | |
| KR100856127B1 (ko) | 하드디스크 드라이브, ta 시그널을 이용한 하드디스크드라이브의 fod 제어방법 및 그 방법을 수행하는 컴퓨터프로그램을 기록한 기록매체 | |
| US20090128944A1 (en) | Hard disk drive tunneling magnetoresistive annealing heads with a fly on demand heater | |
| JP2012212488A (ja) | 情報記録装置および情報記録方法 | |
| JP2006252593A (ja) | 磁気ディスク装置、制御方法及び製造方法 | |
| US20110242707A1 (en) | Hard disk drive | |
| US9269393B1 (en) | Electronic system with data refresh mechanism and method of operation thereof | |
| JP2006185504A (ja) | データ記憶装置及びその制御方法 | |
| CN111435599A (zh) | 磁盘驱动器及用于磁盘驱动器的记录方法 | |
| JP4959641B2 (ja) | 情報記憶装置 | |
| CN101059961B (zh) | 利用块擦除工具擦除垂直记录介质的方法 | |
| CN101059960A (zh) | 用于擦除垂直记录介质的块擦除器 | |
| US20090180207A1 (en) | Hard disk drive and method of controlling auto reassign of the same | |
| US7382565B2 (en) | Method to avoid contact between the head and disk protrusions | |
| US8179640B2 (en) | Head actuator velocity control for electrical power off in a disk drive | |
| JP4317527B2 (ja) | データ保存装置におけるヘッド動作制御方法,及びそれを利用したディスクドライブ,及びディスクドライブの設計方法 | |
| JP2018163725A (ja) | 磁気ディスク装置、コントローラ及びシーク方法 | |
| JP5096037B2 (ja) | ハードディスクドライブ、ハードディスクドライブのfod電圧制御方法及びその方法を行うコンピュータプログラムを記録した記録媒体 | |
| JPH08321149A (ja) | 磁気ディスク装置及びその制御方法 | |
| US8553349B2 (en) | Servo routine for track seeking in a hard disk drive and hard disk drive for performing the same | |
| JP4484169B2 (ja) | 記憶装置、記憶装置制御方法 | |
| JP4891382B2 (ja) | 磁気ディスク装置及びプログラム | |
| JP2004095010A (ja) | ディスク装置とその環境温度に基づく制御方法 | |
| JP2005259340A (ja) | データ保存システムでのリトライ制御方法及びそれを利用したデータ保存装置 | |
| KR100703707B1 (ko) | 하드 디스크 드라이브, 하드 디스크 드라이브의 자기 헤드부상 높이 제어 방법 및 그 방법을 수행하는 컴퓨터프로그램을 기록한 기록 매체 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20091023 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100903 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111206 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20120116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120221 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120321 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150330 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |