JP2010019581A - 方位探知装置 - Google Patents
方位探知装置 Download PDFInfo
- Publication number
- JP2010019581A JP2010019581A JP2008177870A JP2008177870A JP2010019581A JP 2010019581 A JP2010019581 A JP 2010019581A JP 2008177870 A JP2008177870 A JP 2008177870A JP 2008177870 A JP2008177870 A JP 2008177870A JP 2010019581 A JP2010019581 A JP 2010019581A
- Authority
- JP
- Japan
- Prior art keywords
- pulse
- time difference
- measurement point
- pulse train
- azimuth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
【解決手段】単独の受信系で検出されたパルスのパルス到来時刻に基づいて周期性を持って繰り返されるパルス列のフレーム周期を抽出するフレーム抽出部と、或る測定点で検出したパルス列とそのフレーム周期に基づいて、同じ測定点で継続して受信されると想定した場合の仮想パルス列を生成する仮想パルス列生成部と、或る測定点と次の測定点間の距離に基づいて、両測定点が固定されていると仮定した場合の電波の到来時刻差を算出し、この到来時刻差を或る測定点における仮想パルス列と次の測定点で実際に受信されたパルス列のパルス時間差として出力するパルス時間差算出部とを備え、この算出されたパルス時間差から電波発信源の所在方位を算出する。
【選択図】図1
Description
図1は、この発明の実施の形態1による方位探知装置の機能構成を示すブロック図である。
方位探知装置は、航空機、船舶、車両等の移動体プラットフォームに搭載して方位測定を行うもので、単独の空中線1、パルス検出部2、フレーム抽出部3、仮想パルス列生成部4、パルス時間差算出部6、時間差誤差補償部7および方位算出部8で構成されている。この実施の形態1の方位探知装置は、空中線1とパルス検出部2からなる単独の受信系のみにより、到来電波からパルス信号を検出することを一つの特徴としている。
今、本方位探知装置は、移動するプラットフォームに搭載されて等速で、かつ直線移動しながら、一般的なレーダ装置などの電波発信源が或る周期性に従って送信する複数/複種のパルス信号を受信して方位探知を行っているものとする。
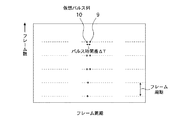
空中線1は、到来する電波を受信すると、受信信号にしてパルス検出部2に出力する。パルス検出部2では、空中線1の受信信号に電波発信源から送信される一連のパルス信号が含まれている場合、そのパルス信号を逐次検出し、周波数、パルス幅等のパルスの基本情報を抽出してパルスごとに順次パルス到来時刻(TOA;Time Of Arrival)を付与し、後段のフレーム抽出部3とパルス時間差算出部6に出力する。パルス検出部2で検出されたパルス信号は図2のように表される。図2は、横軸をフレーム周期、縦軸をフレーム数として、パルス列をTOAに従いフレーム周期毎に折り返して表示したものである。なお、実際には複数種類のパルス列が受信される場合があるが、ここでは説明上一種類のパルス列を例として示すものとする。
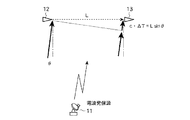
図6において、プラットフォームは水平に移動しているものとし、電波発信源11から同時に送信された電波に対して、固定された2測定点12,13が存在しているとする。電波の到来時刻差が生ずる場合、2測定点間の距離をL、電波の到来時刻差をΔT、光速(または電波速度)をc、プラットフォームの移動直線と直角な線と電波の到来方向とが成す角度をθとすると、周知のように(1)式の関係が成り立つ。
c・ΔT=L・sinθ
ΔT=(L/c)・sinθ (1)
L=v・Δt (2)
また、2測定点12,13における測定時刻をT1、T2とすると、測定時間Δtは(3)式のようになる。
Δt=T2−T1 (3)
したがって、(1)〜(3)式から、固定した2測定点12,13における電波の到来時刻差ΔTは算出できる。ここで、測定点12では、実際のパルス列の代わりに仮想パルス列が受信されているとみなせば、上記電波の到来時刻差ΔTは、測定点13の実際の受信パルス列と測定点12の仮想パルス列のパルス時間差とする。
次に、方位算出部8では、時間差誤差補償部7で平均化されたパルス時間差に基づいて、周知の処理により、電波の到来方位、すなわち電波発信源の所在方位を算出する。
方位探知装置は、〜μsec単位の時間差を検出できる場合、速度300kt程度の航空機に搭載された場合の測定時間を数sec〜数十sec、速度30kt程度の船舶、車両の場合の測定時間を数十sec〜とすれば、所要の測定を行なうことが可能となる。
図7は、この発明の実施の形態2による方位探知装置の機能構成を示すブロック図である。図において、図1に相当する部分には同一符号を付し、その説明は原則として省略する。この実施の形態2の構成は、プラットフォームの移動速度の代わりに用いるプラットフォーム(または方位探知装置)の位置情報を取得するGPS(Global Positioning System)受信機51を新たに備えている。また、実施の形態1のパルス時間差算出部6に代えて、位置情報を用いて処理を行うパルス時間差算出部61を備えている。
図7において、GPS受信機51はGPS信号を受信してプラットフォームの時々刻々の位置情報を取得しパルス時間差算出部6に与える。パルス時間差算出部6では、入力される位置情報から或る測定点と次の測定点で実際にパルスを受信した測定時刻に対応するプラットフォームの位置を抽出し、両測定点間の距離を算出する。次に、算出した両測定点間の距離に基づいて、両測定点が固定されていると仮定した場合の電波の到来時刻差を算出し、この到来時刻差を仮想パルス列生成部4で生成された或る測定点における仮想パルス列と受信系で得られる次の測定点で実際に受信されたパルス列のパルス時間差として時間差誤差補償部7に出力する。
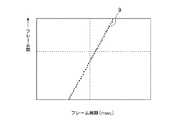
ここでは、上記実施の形態1において、プラットフォームが等速直線運動をしている状態で測定を複数回継続的に行う。この場合、図5に示したフレーム内の実際のパルス列9と仮想パルス列10間で生じるパルス時間差ΔTは、時間の一次関数になると考えられる。そこで、この実施の形態3における時間差誤差補償部7では、パルス時間差算出部6で複数回の測定で順次算出されるパルス時間差を、最小二乗法を用いて処理することにより近似関数を求め、パルス時間差群を補正する。この近似関数は図8に示されるようになる。図8において、14は各時刻におけるパルス時間差、15はパルス時間差の近似直線を表す。次に、方位算出部8では、上記で求めた近似関数に基づいて信号到来方位、すなわち電波の発信源の方位を算出する。
したがって、この実施の形態3によれば、パルス時間差の近似関数用いて発信源の方位を求めるようにしたので、上記実施の形態1の場合よりも精度の高い方位を得ることが可能となる。また、実施の形態3は、実施の形態2に適用しても同様な効果が得られる。
Claims (4)
- 移動するプラットフォームに搭載されて移動しながら電波の到来方位を探知する方位探知装置において、
受信電波から検出した各パルスにパルス到来時刻を付与して出力する空中線とパルス検出部からなる単独の受信系と、
前記受信系で検出されたパルスのパルス到来時刻に基づいて周期性を持って繰り返されるパルス信号を検出し、その繰り返しパターンを1フレームとしたパルス列のフレーム周期を抽出するフレーム抽出部と、
或る測定点で検出したパルス列と当該パルス列のフレーム周期に基づいて、同じ測定点で継続して受信されると想定した場合の仮想パルス列を生成する仮想パルス列生成部と、
或る測定点と次の測定点間の距離を算出し、この算出距離に基づいて、両測定点が固定されていると仮定した場合の電波の到来時刻差を算出し、この到来時刻差を前記仮想パルス列生成部で生成された前記或る測定点における仮想パルス列と前記受信系で得られる前記次の測定点で実際に受信されたパルス列のパルス時間差として出力するパルス時間差算出部と、
前記算出されたパルス時間差をフレーム毎に平均化する時間差誤差補償部と、
前記平均化されたパルス時間差に基づいて、対応する電波発信源の所在方位を算出する方位算出部を備えたことを特徴とする方位探知装置。 - パルス時間差算出部は、或る測定点と次の測定点で実際にパルスを受信した測定時刻の差を算出し、この時刻差とプラットフォームの移動速度に基づいて前記両測定点間の距離を算出することを特徴とする請求項1記載の方位探知装置。
- GPS信号を受信しプラットフォームの位置情報を取得するGPS受信機を備え、
パルス時間差算出部は、前記GPS受信機で取得した位置情報から或る測定点と次の測定点で実際にパルスを受信した測定時刻に対応するプラットフォームの位置を抽出して前記両測定点間の距離を算出することを特徴とする請求項1記載の方位探知装置。 - 継続的に測定を行い方位探知する場合において、
時間差誤差補償部は、パルス時間差をフレーム毎に平均化する代わりに、パルス時間差に基づいて最小二乗法を用いた近似関数を求め、
方位算出部は、前記求めたパルス時間差の近似関数に基づいて、対応する電波発信源の所在方位を算出することを特徴とする請求項1から請求項3のうちのいずれか1項記載の方位探知装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008177870A JP4948485B2 (ja) | 2008-07-08 | 2008-07-08 | 方位探知装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008177870A JP4948485B2 (ja) | 2008-07-08 | 2008-07-08 | 方位探知装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010019581A true JP2010019581A (ja) | 2010-01-28 |
| JP4948485B2 JP4948485B2 (ja) | 2012-06-06 |
Family
ID=41704659
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008177870A Expired - Fee Related JP4948485B2 (ja) | 2008-07-08 | 2008-07-08 | 方位探知装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4948485B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013181988A (ja) * | 2012-03-02 | 2013-09-12 | U-Blox Ag | 局所的電波伝搬モデルを使用した測位 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000147083A (ja) * | 1998-11-06 | 2000-05-26 | Ntt Mobil Communication Network Inc | 到来角測定方法及び到来角測定器 |
| JP2003215225A (ja) * | 2002-01-28 | 2003-07-30 | Mitsubishi Electric Corp | 時間差方位検出装置 |
| JP2006170865A (ja) * | 2004-12-16 | 2006-06-29 | Nippon Telegr & Teleph Corp <Ntt> | 到来方向推定方法および位置推定方法 |
-
2008
- 2008-07-08 JP JP2008177870A patent/JP4948485B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000147083A (ja) * | 1998-11-06 | 2000-05-26 | Ntt Mobil Communication Network Inc | 到来角測定方法及び到来角測定器 |
| JP2003215225A (ja) * | 2002-01-28 | 2003-07-30 | Mitsubishi Electric Corp | 時間差方位検出装置 |
| JP2006170865A (ja) * | 2004-12-16 | 2006-06-29 | Nippon Telegr & Teleph Corp <Ntt> | 到来方向推定方法および位置推定方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013181988A (ja) * | 2012-03-02 | 2013-09-12 | U-Blox Ag | 局所的電波伝搬モデルを使用した測位 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4948485B2 (ja) | 2012-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10175348B2 (en) | Use of range-rate measurements in a fusion tracking system via projections | |
| KR102841350B1 (ko) | 동적 보상 바람 측정 레이저 레이더 시스템 및 그 바람 측정 방법 | |
| JP6314225B2 (ja) | アンテナ基線制約を使用する異常検出 | |
| US10459068B2 (en) | Location system and computer program | |
| JP5739822B2 (ja) | 速度・距離検出システム、速度・距離検出装置、および速度・距離検出方法 | |
| CN104316903A (zh) | 一种三站时差定位性能试验评估方法 | |
| JP2010060303A (ja) | 測位装置 | |
| KR20140126790A (ko) | 무선 센서 네트워크 기반의 위치 추정방법 | |
| AU2006201543B2 (en) | System and method for establishing the instantaneous speed of an object | |
| US20130187806A1 (en) | Device and method for selecting signal, and radar apparatus | |
| JP2015210143A (ja) | 水中探知装置、水中探知方法、および水中探知プログラム | |
| CN119936885A (zh) | 抗干扰目标声学特征定位系统与方法 | |
| JP2010256301A (ja) | マルチパス判定装置及びプログラム | |
| JPH1020017A (ja) | 超音波を利用した変位計測システムおよび変位計測装置 | |
| KR20080025667A (ko) | 무선 방향 탐지기의 교정을 위한 방법 및 시스템 | |
| JP4948485B2 (ja) | 方位探知装置 | |
| JP4266810B2 (ja) | 風速ベクトル算出装置 | |
| JP2856186B2 (ja) | 合成開口レーダシステム、その情報処理装置および方法 | |
| JP3810323B2 (ja) | 時間差方位検出装置 | |
| US20080068927A1 (en) | Method for an Antenna Angular Calibration by Relative Distance Measuring | |
| JP5593062B2 (ja) | 計測装置、計測システム、および計測方法 | |
| JP4778277B2 (ja) | 測位信号受信装置及び測位信号受信方法 | |
| JP2010060421A (ja) | 移動体用測位システム及びgnss受信装置 | |
| JP4825574B2 (ja) | レーダ装置 | |
| JP2013024775A (ja) | レーダ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120306 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150316 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |