JP2010008237A - Idタグ群の位置検知装置及びその方法 - Google Patents
Idタグ群の位置検知装置及びその方法 Download PDFInfo
- Publication number
- JP2010008237A JP2010008237A JP2008168046A JP2008168046A JP2010008237A JP 2010008237 A JP2010008237 A JP 2010008237A JP 2008168046 A JP2008168046 A JP 2008168046A JP 2008168046 A JP2008168046 A JP 2008168046A JP 2010008237 A JP2010008237 A JP 2010008237A
- Authority
- JP
- Japan
- Prior art keywords
- tag
- tags
- read
- reading
- positions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
本発明は、エンドデバイスとしてのIDタグ間にける通信が行えないような場合であっても、屋内において、超小型のパウダー状のIDタグの位置を検出することを可能とするものである。
【解決手段】
本発明のIDタグ群の位置検知装置は、複数のIDタグを同時に読み取り可能なIDタグリーダと、前記IDタグリーダによって同時に読み取られた複数のIDタグの位置情報を記憶する記憶部と、前記IDタグリーダにおける異なる読み取り操作によって読み取られた複数回の複数のIDタグの位置情報から、共通するIDタグを検索し、複数のIDタグの位置を推定する推定部と、を有することを特徴とする。
【選択図】図1
Description
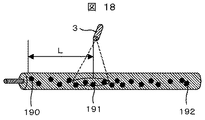
2 読み取り範囲
3 アンテナ
4 IDタグリーダ
5 記憶部
6 IDタグ配置トポロジー記憶部
7 IDタグ配置トポロジー推定部
8 絶対位置の設置部
9 IDタグ配置表示部
10 IDタグ配置利用アプリケーション部
11 既に位置が分かっているIDタグのID及び位置情報の記憶部
12 絶対位置の入力手段
Claims (8)
- 複数のIDタグを同時に読み取り可能なIDタグリーダと、前記IDタグリーダによって同時に読み取られた複数のIDタグの位置情報を記憶する記憶部と、前記IDタグリーダにおける異なる読み取り操作によって読み取られた複数回の複数のIDタグの位置情報から、共通するIDタグを検索し、複数のIDタグの位置を推定する推定部と、を有することを特徴とするIDタグ群の位置検知装置。
- 請求項1において、
前記複数のIDタグの位置を推定する際に、前記IDタグリーダによって同時に読み取られた複数のIDタグの位置情報を一単位として、その接続関係から仮想ノードを形成し、複数のIDタグの位置を推定することを特徴とするIDタグ群の位置検知装置。 - 請求項2において、
前記複数のIDタグの位置を推定する際に、位置情報が既知である特定のIDタグがある場合には、その位置情報を利用して、前記接続関係を補正することを特徴とするIDタグ群の位置検知装置。 - 請求項2において、
前記接続関係の拘束条件として、読み取り高さ及び読み取り範囲を用いたことを特徴とするIDタグ群の位置検知装置。 - 複数のIDタグを同時に読み取り可能なIDタグリーダを用いて、同時に読み取られた複数のIDタグの位置情報を記憶し、
前記IDタグリーダを用いて、複数回、異なる読み取り操作によって読み取られた複数のIDタグの位置情報から、共通するIDタグを検索し、複数のIDタグの位置を推定することを特徴とするIDタグ群の位置検知方法。 - 請求項5において、
前記複数のIDタグの位置を推定する際に、前記IDタグリーダによって同時に読み取られた複数のIDタグの位置情報を一単位として、その接続関係から仮想ノードを形成し、複数のIDタグの位置を推定することを特徴とするIDタグ群の位置検知方法。 - 請求項6において、
前記複数のIDタグの位置を推定する際に、位置情報が既知である特定のIDタグがある場合には、その位置情報を利用して、前記接続関係を補正することを特徴とするIDタグ群の位置検知方法。 - 請求項6において、
前記接続関係の拘束条件として、読み取り高さ及び読み取り範囲を用いたことを特徴とするIDタグ群の位置検知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008168046A JP5210727B2 (ja) | 2008-06-27 | 2008-06-27 | Idタグ群の位置検知装置及びその方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008168046A JP5210727B2 (ja) | 2008-06-27 | 2008-06-27 | Idタグ群の位置検知装置及びその方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010008237A true JP2010008237A (ja) | 2010-01-14 |
| JP2010008237A5 JP2010008237A5 (ja) | 2010-06-03 |
| JP5210727B2 JP5210727B2 (ja) | 2013-06-12 |
Family
ID=41588931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008168046A Expired - Fee Related JP5210727B2 (ja) | 2008-06-27 | 2008-06-27 | Idタグ群の位置検知装置及びその方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5210727B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013196221A (ja) * | 2012-03-16 | 2013-09-30 | Fujitsu Ltd | タグ位置推定システム、タグ位置推定方法、及びタグ位置推定プログラム |
| US9128187B2 (en) | 2011-09-29 | 2015-09-08 | International Business Machines Corporation | Detection of a position of an object |
| JP2017108257A (ja) * | 2015-12-09 | 2017-06-15 | 学校法人 関西大学 | 位置推定装置、位置推定をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004356677A (ja) * | 2003-05-27 | 2004-12-16 | Hitachi Ltd | ネットワークに接続されたノードの位置情報管理方法 |
| JP2005228292A (ja) * | 2004-01-16 | 2005-08-25 | Matsushita Electric Ind Co Ltd | 物品位置検出方法、無線タグ位置校正システムおよび物品位置検出装置 |
| JP2007213122A (ja) * | 2006-02-07 | 2007-08-23 | Yaskawa Electric Corp | Rfidタグ情報読取り方法 |
-
2008
- 2008-06-27 JP JP2008168046A patent/JP5210727B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004356677A (ja) * | 2003-05-27 | 2004-12-16 | Hitachi Ltd | ネットワークに接続されたノードの位置情報管理方法 |
| JP2005228292A (ja) * | 2004-01-16 | 2005-08-25 | Matsushita Electric Ind Co Ltd | 物品位置検出方法、無線タグ位置校正システムおよび物品位置検出装置 |
| JP2007213122A (ja) * | 2006-02-07 | 2007-08-23 | Yaskawa Electric Corp | Rfidタグ情報読取り方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9128187B2 (en) | 2011-09-29 | 2015-09-08 | International Business Machines Corporation | Detection of a position of an object |
| JP2013196221A (ja) * | 2012-03-16 | 2013-09-30 | Fujitsu Ltd | タグ位置推定システム、タグ位置推定方法、及びタグ位置推定プログラム |
| JP2017108257A (ja) * | 2015-12-09 | 2017-06-15 | 学校法人 関西大学 | 位置推定装置、位置推定をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5210727B2 (ja) | 2013-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101728123B1 (ko) | 지구 자기장을 이용한 동시 로컬리제이션 및 매핑 | |
| Taneja et al. | Analysis of three indoor localization technologies for supporting operations and maintenance field tasks | |
| Taneja et al. | Sensing and field data capture for construction and facility operations | |
| US11614743B2 (en) | System and method for navigating a sensor-equipped mobile platform through an environment to a destination | |
| US20150119086A1 (en) | Simultaneous localization and mapping systems and methods | |
| US20130060520A1 (en) | Method And System For Position Determination Using RFID Devices | |
| US10834528B2 (en) | Mobile device positioning system and method | |
| US20130272569A1 (en) | Target identification system target identification server and target identification terminal | |
| JP2018189639A (ja) | 複数のビーコンの位置を決定するための方法、プログラム及びコンピュータシステム | |
| US20170146349A1 (en) | Landmark location determination | |
| KR101122185B1 (ko) | 정보인식수단을 이용한 지하시설물 관리시스템 및 그 방법 | |
| US11002842B2 (en) | Method and apparatus for determining the location of a static object | |
| JP2011102707A (ja) | 測位装置及び測位方法 | |
| US10215839B2 (en) | Pose detection device of movable body and location-based supplemental service providing system | |
| JP5210727B2 (ja) | Idタグ群の位置検知装置及びその方法 | |
| JP5004678B2 (ja) | 位置推定システム及び無線通信端末並びに位置推定装置 | |
| Daniş et al. | An indoor localization dataset and data collection framework with high precision position annotation | |
| JP2008193595A (ja) | 通信制御装置 | |
| KR101720097B1 (ko) | 사용자 기기의 측위방법 | |
| JP2011102792A (ja) | 測位装置及び測位方法 | |
| US11175144B2 (en) | Magnetic parameter-based localization in mobile device navigation | |
| Isokawa et al. | An Anchor‐Free Localization Scheme with Kalman Filtering in ZigBee Sensor Network | |
| KR20210012620A (ko) | 위치 인식 시스템 및 방법 | |
| Costin et al. | Utilizing BIM for real-time visualization and indoor localization of resources | |
| Gore et al. | IoT based equipment identification and location for maintenance in large deployment industrial plants |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100326 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120306 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120313 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120511 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130225 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160301 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |