JP2009207183A - 映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 - Google Patents
映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 Download PDFInfo
- Publication number
- JP2009207183A JP2009207183A JP2009141890A JP2009141890A JP2009207183A JP 2009207183 A JP2009207183 A JP 2009207183A JP 2009141890 A JP2009141890 A JP 2009141890A JP 2009141890 A JP2009141890 A JP 2009141890A JP 2009207183 A JP2009207183 A JP 2009207183A
- Authority
- JP
- Japan
- Prior art keywords
- image
- camera
- reference viewpoint
- distance
- video
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Landscapes
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
【解決手段】符号側は、基準視点のカメラにより撮影された基準視点画像と、基準視点画像を撮影したカメラから被写体までの推定距離を示す距離画像と、基準視点画像と距離画像とカメラの位置関係とに基づいて推定された視差補償画像と符号化対象画像との差分を示す視差差分画像とを符号化する。復号側は、基準視点画像と距離画像と視差差分画像とを復号して、復号した基準視点画像と復号した距離画像とカメラの位置関係とに基づいて視差補償画像を推定し、その推定した視差補償画像と復号した視差差分画像とに基づいて、基準視点以外の視点に対応付けられるカメラの撮影した符号化対象画像を復元する。
【選択図】図2
Description
幾何情報を利用しない手法でもって、幾何情報を利用する手法と同等の品質の映像を合成するためには、より多くのカメラからの映像が入力として必要となる。多くのカメラの映像を用いるということは非常に多くの演算が必要になることを意味する。
この目的を達成するために、本発明の映像符号化方法は、ある被写体を撮影する複数のカメラにより撮影された画像を符号化することを実現するために、(a)基準視点となるカメラにより撮影された基準視点画像を符号化する基準視点画像符号化ステップと、(b)基準視点画像を撮影したカメラから被写体までの推定距離を示す距離画像を生成する距離画像生成ステップと、(c)生成した距離画像を符号化する距離画像符号化ステップと、(d)基準視点画像と距離画像とカメラの設置位置および向きについて規定するカメラの位置関係とに基づいて、基準視点以外の視点における視差補償画像(視差に基づく予測画像となるもの)を推定するとともに、このとき画素値を推定できない画素については、周辺の画素の動き情報からその画素の動き情報を推定して、その推定した動き情報と符号化済みの画像の画素値とに基づいて、その画素の画素値を推定する視差補償画像推定ステップと、(e)推定した視差補償画像とその推定対象の視点に対応付けられるカメラの撮影した符号化対象画像との差分を示す視差差分画像を算出する視差差分画像算出ステップと、(f)算出した視差差分画像を符号化する視差差分画像符号化ステップとを有する。
視差補償画像推定ステップでは、復号側がカメラの位置関係の情報を符号化データからではなくて得ることができる場合には、基準視点画像の符号化データを復号することで得られる基準視点画像と、距離画像の符号化データを復号することで得られる距離画像と、符号化されることのないカメラの位置関係とに基づいて、基準視点以外の視点における視差補償画像を推定することがある。
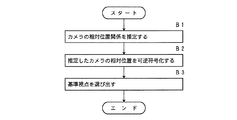
復号側がカメラの位置関係の情報を符号化データから得ることになる場合には、上述の基本的な構成のステップに加えて、(g)外部からの情報に従ってカメラの位置関係を取得するか、全カメラの画像に基づいてカメラの位置関係を推定することで、カメラの位置関係を設定するカメラ位置関係設定ステップと、(h)設定したカメラの位置関係の情報を符号化するカメラ位置関係情報符号化ステップとを有する。
視差補償画像推定ステップでは、復号側がカメラの位置関係の情報を符号化データから得ることになる場合には、基準視点画像の符号化データを復号することで得られる基準視点画像と、距離画像の符号化データを復号することで得られる距離画像と、カメラ位置関係情報の符号化データを復号することで得られるカメラの位置関係とに基づいて、基準視点以外の視点における視差補償画像を推定することがある。
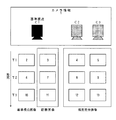
基準視点となるカメラを自動的に決定する場合には、上述の基本的な構成のステップに加えて、(i)他のカメラが撮影する空間と最も重複する空間を撮影しているカメラを基準視点となるカメラとして設定するステップを有することがある。
距離画像生成ステップでは、画像をブロックに分割して、ブロックごとに距離を推定することで距離画像を生成することがある。
距離画像生成ステップでは、規定のアルゴリズムに従って距離画像を生成する場合に、現時刻において生成した距離画像の評価値と、1つ前の時刻において生成した距離画像の評価値との差分値を求めて、その差分値の大きさを所定の閾値と比較することで判断して、その差分値が大きいことを判断する場合には、現時刻において生成した距離画像をそのまま用いることを決定し、その差分値が小さいことを判断する場合には、1つ前の時刻において生成した距離画像に変更して用いることを決定することで距離画像を生成することがある。
視差補償画像推定ステップでは、基準視点画像と距離画像とカメラの位置関係とに基づいて基準視点以外の視点における視差補償画像を推定することになるが、このとき、画素値を推定できない画素について、周辺の画素の画素値から、その画素の画素値を推定するように処理することも可能である。
実際には、視差補償画像推定ステップでは、基準視点画像と距離画像とカメラの位置関係とに基づいて基準視点以外の視点における視差補償画像を推定することになるが、このとき、画素値を推定できない画素については、周辺の画素の動き情報からその画素の動き情報を推定して、その推定した動き情報と符号化済みの画像の画素値とに基づいて、その画素の画素値を推定することになる。
視差補償画像推定ステップでは、基準視点画像と距離画像とカメラの位置関係とに基づいて基準視点以外の視点における視差補償画像を推定することになるが、このとき、画素値を推定できない画素について、〔1−7〕の方法に従って推定した視差補償画像を用いる場合の符号量と、〔1−8〕の方法に従って推定した視差補償画像を用いる場合の符号量とを比較して、視差補償画像ごとに効率的な符号化を行える方法を選択することで、その画素の画素値を推定するように処理することも可能である。この構成を採るときには、どちらの予測モードを用いたのかを示す情報についても符号化することになる。
距離画像符号化ステップでは、基準視点画像を符号化する際に使われた動きベクトルを用いて距離画像を符号化することがある。
視差差分画像符号化ステップでは、基準視点画像を符号化する際に使われた動きベクトルと距離画像とカメラの位置関係とに基づいて推定される動きベクトルか、自身の参照画像から推定される動きベクトルの内の符号化効率のよい方を選択して符号化することがある。
視差差分画像符号化ステップでは、基準視点画像を符号化する際に使われた動きベクトルと距離画像とカメラの位置関係とに基づいて推定される動きベクトルか、自身の参照画像から推定される動きベクトルの内の符号化効率のよい方を選択して符号化することがあるが、この動きベクトルを推定するときに、距離画像の符号化データを復号することで得られる距離画像を用いて動きベクトルを推定することがある。
本発明の映像復号方法は、本発明の映像符号化方法により生成された符号化データを復号することで、ある被写体を撮影する複数のカメラにより撮影された画像を復元することを実現するために、(a)基準視点となるカメラにより撮影された基準視点画像についての符号化データを復号する基準視点画像復号ステップと、(b)基準視点画像を撮影したカメラから被写体までの推定距離を示す距離画像についての符号化データを復号する距離画像復号ステップと、(c)基準視点以外の視点に対応付けられるカメラの撮影した符号化対象画像との差分を示す視差差分画像についての符号化データを復号する視差差分画像復号ステップと、(d)復号した基準視点画像と復号した距離画像とカメラの設置位置および向きについて規定するカメラの位置関係とに基づいて、基準視点以外の視点における視差補償画像を推定するとともに、このとき画素値を推定できない画素については、周辺の画素の動き情報からその画素の動き情報を推定して、その推定した動き情報と復号済みの画像の画素値とに基づいて、その画素の画素値を推定する視差補償画像推定ステップと、(e)推定した視差補償画像と復号した視差差分画像とに基づいて、基準視点以外の視点に対応付けられるカメラの撮影した符号化対象画像を復元する符号化対象画像復元ステップとを有する。
カメラの位置関係の情報を符号化データから得ることになる場合には、上述の基本的な構成のステップに加えて、(f)各画像を撮影したカメラの位置関係の情報についての符号化データを復号するカメラ位置関係情報復号ステップを有する。
視差補償画像推定ステップでは、復号した基準視点画像と復号した距離画像とカメラの位置関係とに基づいて基準視点以外の視点における視差補償画像を推定することになるが、このとき、画素値を推定できない画素については、周辺の画素の画素値から、その画素の画素値を推定するように処理することも可能である。
実際には、視差補償画像推定ステップでは、復号した基準視点画像と復号した距離画像とカメラの位置関係とに基づいて基準視点以外の視点における視差補償画像を推定することになるが、このとき、画素値を推定できない画素については、周辺の画素の動き情報からその画素の動き情報を推定して、その推定した動き情報と復号済みの画像の画素値とに基づいて、その画素の画素値を推定することになる。
視差補償画像推定ステップでは、復号した基準視点画像と復号した距離画像とカメラの位置関係とに基づいて基準視点以外の視点における視差補償画像を推定することになるが、このとき、画素値を推定できない画素については、符号化データに埋め込まれている予測モードの情報に基づいて、〔2−2〕の推定方法か〔2−3〕の推定方法のどちらかを選択することで、視差補償画像を単位にして2つの方法を切り替えながら画素値の推定を行うように処理することも可能である。
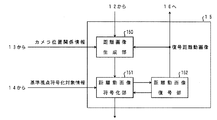
本発明の映像符号化方法は、復号側がカメラの位置関係の情報を符号化データからではなくて得ることができる場合には、基準視点となるカメラにより撮影された基準視点画像と、基準視点画像を撮影したカメラから被写体までの推定距離を示す距離画像と、基準視点画像と距離画像とカメラの位置関係とに基づいて推定された視差補償画像と符号化対象画像との差分を示す視差差分画像という3種類の画像を符号化する。そして、復号側がカメラの位置関係の情報を符号化データから得ることになる場合には、この3種類の画像に加えて、カメラの位置関係の情報を符号化する。
この推定したカメラの位置関係の情報は復号側でも正確に必要となることから、カメラ位置関係符号化部132で、可逆符号化する〔B2〕。

2 映像復号装置
11 画像情報入力部
12 画像メモリ
13 カメラ情報初期設定部
14 基準視点動画像処理部
15 距離画像処理部
16 非基準視点動画像処理部
21 カメラ情報復号部
22 カメラ情報メモリ
23 基準視点動画像復号部
24 符号化対象情報メモリ
25 距離動画像復号部
26 視差差分動画像復号部
27 非基準視点動画像復号部
28 画像出力部
Claims (16)
- ある被写体を撮影する複数のカメラにより撮影された画像を符号化する映像符号化方法であって、
基準視点となるカメラにより撮影された基準視点画像を符号化するステップと、
上記基準視点画像を撮影したカメラから被写体までの推定距離を示す距離画像を生成するステップと、
上記距離画像を符号化するステップと、
上記基準視点画像と上記距離画像とカメラの設置位置および向きについて規定するカメラの位置関係とに基づいて、上記基準視点以外の視点における視差補償画像を推定するとともに、このとき画素値を推定できない画素については、周辺の画素の動き情報からその画素の動き情報を推定して、その推定した動き情報と符号化済みの画像の画素値とに基づいて、その画素の画素値を推定するステップと、
上記推定した視差補償画像とその推定対象の視点に対応付けられるカメラの撮影した符号化対象画像との差分を示す視差差分画像を算出するステップと、
上記視差差分画像を符号化するステップとを有することを、
特徴とする映像符号化方法。 - 請求項1に記載の映像符号化方法において、
上記視差補償画像を推定するステップでは、上記基準視点画像の符号化データを復号することで得られる基準視点画像と、上記距離画像の符号化データを復号することで得られる距離画像とを使って、上記基準視点以外の視点における視差補償画像を推定することを、
特徴とする映像符号化方法。 - 請求項1に記載の映像符号化方法において、
外部からの情報に従って上記カメラの位置関係を取得するか、全カメラの画像に基づいて上記カメラの位置関係を推定することで、上記カメラの位置関係を設定するステップと、
上記設定したカメラの位置関係の情報を符号化するステップとを有することを、
特徴とする映像符号化方法。 - 請求項3に記載の映像符号化方法において、
上記視差補償画像を推定するステップでは、上記基準視点画像の符号化データを復号することで得られる基準視点画像と、上記距離画像の符号化データを復号することで得られる距離画像と、上記カメラ位置関係情報の符号化データを復号することで得られるカメラの位置関係とに基づいて、上記基準視点以外の視点における視差補償画像を推定することを、
特徴とする映像符号化方法。 - 請求項1ないし4のいずれか1項に記載の映像符号化方法において、
他のカメラが撮影する空間と最も重複する空間を撮影しているカメラを基準視点となるカメラとして設定するステップを有することを、
特徴とする映像符号化方法。 - 請求項1ないし5のいずれか1項に記載の映像符号化方法において、
上記距離画像を生成するステップでは、画像をブロックに分割して、ブロックごとに距離を推定することで距離画像を生成することを、
特徴とする映像符号化方法。 - 請求項1ないし6のいずれか1項に記載の映像符号化方法において、
上記距離画像を生成するステップでは、規定のアルゴリズムに従って距離画像を生成する場合に、現時刻において生成した距離画像の評価値と、1つ前の時刻において生成した距離画像の評価値との差分値を求めて、その差分値の大きさを所定の閾値と比較することで判断して、その差分値が大きいことを判断する場合には、現時刻において生成した距離画像をそのまま用いることを決定し、その差分値が小さいことを判断する場合には、1つ前の時刻において生成した距離画像に変更して用いることを決定することで距離画像を生成することを、
特徴とする映像符号化方法。 - 請求項1ないし7のいずれか1項に記載の映像符号化方法において、
上記距離画像を符号化するステップでは、上記基準視点画像を符号化する際に使われた動きベクトルを用いて上記距離画像を符号化することを、
特徴とする映像符号化方法。 - 請求項1ないし8のいずれか1項に記載の映像符号化方法において、
上記視差差分画像を符号化するステップでは、上記基準視点画像を符号化する際に使われた動きベクトルと上記距離画像と上記カメラの位置関係とに基づいて推定される動きベクトルか、自身の参照画像から推定される動きベクトルの内の符号化効率のよい方を選択して符号化することを、
特徴とする映像符号化方法。 - 請求項9に記載の映像符号化方法において、
上記視差差分画像を符号化するステップでは、動きベクトルを推定するときに、上記距離画像の符号化データを復号することで得られる距離画像を用いることを、
特徴とする映像符号化方法。 - ある被写体を撮影する複数のカメラにより撮影された画像の符号化データを復号する映像復号方法であって、
基準視点となるカメラにより撮影された基準視点画像についての符号化データを復号するステップと、
上記基準視点画像を撮影したカメラから被写体までの推定距離を示す距離画像についての符号化データを復号するステップと、
上記基準視点以外の視点に対応付けられるカメラの撮影した符号化対象画像との差分を示す視差差分画像についての符号化データを復号するステップと、
上記復号した基準視点画像と上記復号した距離画像とカメラの設置位置および向きについて規定するカメラの位置関係とに基づいて、上記基準視点以外の視点における視差補償画像を推定するとともに、このとき画素値を推定できない画素については、周辺の画素の動き情報からその画素の動き情報を推定して、その推定した動き情報と復号済みの画像の画素値とに基づいて、その画素の画素値を推定するステップと、
上記推定した視差補償画像と上記復号した視差差分画像とに基づいて、上記基準視点以外の視点に対応付けられるカメラの撮影した符号化対象画像を復元するステップとを有することを、
特徴とする映像復号方法。 - 請求項11に記載の映像復号方法において、
上記カメラの位置関係の情報についての符号化データを復号するステップを有することを、
特徴とする映像復号方法。 - 請求項1ないし10のいずれか1項に記載の映像符号化方法をコンピュータに実行させるための映像符号化プログラム。
- 請求項1ないし10のいずれか1項に記載の映像符号化方法をコンピュータに実行させるための映像符号化プログラムを記録したコンピュータ読み取り可能な記録媒体。
- 請求項11または12に記載の映像復号方法をコンピュータに実行させるための映像復号プログラム。
- 請求項11または12に記載の映像復号方法をコンピュータに実行させるための映像復号プログラムを記録したコンピュータ読み取り可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009141890A JP4851563B2 (ja) | 2009-06-15 | 2009-06-15 | 映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009141890A JP4851563B2 (ja) | 2009-06-15 | 2009-06-15 | 映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005218681A Division JP4414379B2 (ja) | 2005-07-28 | 2005-07-28 | 映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009207183A true JP2009207183A (ja) | 2009-09-10 |
| JP4851563B2 JP4851563B2 (ja) | 2012-01-11 |
Family
ID=41148905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009141890A Active JP4851563B2 (ja) | 2009-06-15 | 2009-06-15 | 映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4851563B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102036066A (zh) * | 2009-10-05 | 2011-04-27 | 索尼公司 | 图像处理装置、图像处理方法和程序 |
| US10027985B2 (en) | 2012-03-22 | 2018-07-17 | Sharp Kabushiki Kaisha | Image coding device, image decoding device, image coding method, and image decoding method |
| CN112788325A (zh) * | 2019-11-06 | 2021-05-11 | Oppo广东移动通信有限公司 | 一种图像处理方法、编码装置、解码装置及存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06113335A (ja) * | 1992-09-29 | 1994-04-22 | Fujitsu Ltd | 画像高能率符号化方式 |
| JPH06153239A (ja) * | 1992-11-12 | 1994-05-31 | Nec Corp | 画像の符号化方式 |
| JPH09261653A (ja) * | 1996-03-18 | 1997-10-03 | Sharp Corp | 多視点画像符号化装置 |
| JPH09275578A (ja) * | 1996-04-04 | 1997-10-21 | Sharp Corp | 多視点画像符号化装置および復号装置 |
| JPH10191394A (ja) * | 1996-12-24 | 1998-07-21 | Sharp Corp | 多視点画像符号化装置 |
| JP2000023198A (ja) * | 1998-07-03 | 2000-01-21 | Nippon Hoso Kyokai <Nhk> | 多視点画像の圧縮符号化装置および伸長復号化装置 |
| JP2001285871A (ja) * | 2000-03-15 | 2001-10-12 | Thomson Multimedia Sa | ビデオ画像を符号化する処理方法及びその装置 |
-
2009
- 2009-06-15 JP JP2009141890A patent/JP4851563B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06113335A (ja) * | 1992-09-29 | 1994-04-22 | Fujitsu Ltd | 画像高能率符号化方式 |
| JPH06153239A (ja) * | 1992-11-12 | 1994-05-31 | Nec Corp | 画像の符号化方式 |
| JPH09261653A (ja) * | 1996-03-18 | 1997-10-03 | Sharp Corp | 多視点画像符号化装置 |
| JPH09275578A (ja) * | 1996-04-04 | 1997-10-21 | Sharp Corp | 多視点画像符号化装置および復号装置 |
| JPH10191394A (ja) * | 1996-12-24 | 1998-07-21 | Sharp Corp | 多視点画像符号化装置 |
| JP2000023198A (ja) * | 1998-07-03 | 2000-01-21 | Nippon Hoso Kyokai <Nhk> | 多視点画像の圧縮符号化装置および伸長復号化装置 |
| JP2001285871A (ja) * | 2000-03-15 | 2001-10-12 | Thomson Multimedia Sa | ビデオ画像を符号化する処理方法及びその装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102036066A (zh) * | 2009-10-05 | 2011-04-27 | 索尼公司 | 图像处理装置、图像处理方法和程序 |
| CN103327341A (zh) * | 2009-10-05 | 2013-09-25 | 索尼公司 | 图像处理装置以及图像处理方法 |
| US10027985B2 (en) | 2012-03-22 | 2018-07-17 | Sharp Kabushiki Kaisha | Image coding device, image decoding device, image coding method, and image decoding method |
| CN112788325A (zh) * | 2019-11-06 | 2021-05-11 | Oppo广东移动通信有限公司 | 一种图像处理方法、编码装置、解码装置及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4851563B2 (ja) | 2012-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4414379B2 (ja) | 映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP4999854B2 (ja) | 画像符号化方法及び復号方法、それらの装置、及びそれらのプログラム並びにプログラムを記録した記憶媒体 | |
| JP5303754B2 (ja) | 多視点映像符号化方法、多視点映像復号方法、多視点映像符号化装置、多視点映像復号装置、及びプログラム | |
| KR101451286B1 (ko) | 움직임 벡터 추정 방법, 다시점 영상 부호화 방법, 다시점 영상 복호 방법, 움직임 벡터 추정 장치, 다시점 영상 부호화 장치, 다시점 영상 복호 장치, 움직임 벡터 추정 프로그램, 다시점 영상 부호화 프로그램 및 다시점 영상 복호 프로그램 | |
| JP5197591B2 (ja) | 映像符号化方法及び復号方法、それらの装置、それらのプログラム並びにプログラムを記録した記録媒体 | |
| WO2014050830A1 (ja) | 画像符号化方法、画像復号方法、画像符号化装置、画像復号装置、画像符号化プログラム、画像復号プログラム及び記録媒体 | |
| JP5281632B2 (ja) | 多視点画像符号化方法,多視点画像復号方法,多視点画像符号化装置,多視点画像復号装置およびそれらのプログラム | |
| JP5219199B2 (ja) | 多視点画像符号化方法,復号方法,符号化装置,復号装置,符号化プログラム,復号プログラムおよびコンピュータ読み取り可能な記録媒体 | |
| JP6039178B2 (ja) | 画像符号化装置、画像復号装置、並びにそれらの方法及びプログラム | |
| US20170070751A1 (en) | Image encoding apparatus and method, image decoding apparatus and method, and programs therefor | |
| JP4851564B2 (ja) | 映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| KR20150135457A (ko) | 복수의 입력 화상을 인코딩하는 방법, 프로그램을 격납하는 기억 매체 및 장치 | |
| JP4851563B2 (ja) | 映像符号化方法、映像復号方法、映像符号化プログラム、映像復号プログラム及びそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP4944046B2 (ja) | 映像符号化方法,復号方法,符号化装置,復号装置,それらのプログラムおよびコンピュータ読み取り可能な記録媒体 | |
| US20160286212A1 (en) | Video encoding apparatus and method, and video decoding apparatus and method | |
| WO2014156647A1 (ja) | 複数の入力画像をエンコーディングする方法、プログラムを格納する記憶媒体および装置 | |
| JP5531282B2 (ja) | 多視点画像符号化方法,復号方法,符号化装置,復号装置,符号化プログラム,復号プログラムおよびコンピュータ読み取り可能な記録媒体 | |
| US20170019683A1 (en) | Video encoding apparatus and method and video decoding apparatus and method | |
| US10972751B2 (en) | Video encoding apparatus and method, and video decoding apparatus and method | |
| JP6232117B2 (ja) | 画像符号化方法、画像復号方法、及び記録媒体 | |
| JP6599634B2 (ja) | 多視点画像符号化装置、多視点画像復号装置、補助情報生成装置、画像復元装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090615 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100331 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111018 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111020 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4851563 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141028 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |