JP2008510522A - 経口的な内視鏡胃食道フラップ弁修復器具、アセンブリ、システムおよび方法 - Google Patents
経口的な内視鏡胃食道フラップ弁修復器具、アセンブリ、システムおよび方法 Download PDFInfo
- Publication number
- JP2008510522A JP2008510522A JP2007528052A JP2007528052A JP2008510522A JP 2008510522 A JP2008510522 A JP 2008510522A JP 2007528052 A JP2007528052 A JP 2007528052A JP 2007528052 A JP2007528052 A JP 2007528052A JP 2008510522 A JP2008510522 A JP 2008510522A
- Authority
- JP
- Japan
- Prior art keywords
- tissue
- stomach
- gastroesophageal flap
- instrument
- gastroesophageal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images
























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07207—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously the staples being applied sequentially
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00818—Treatment of the gastro-intestinal system
- A61B2017/00827—Treatment of gastro-esophageal reflux
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B2017/07214—Stapler heads
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2905—Details of shaft flexible
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/30—Surgical pincettes without pivotal connections
- A61B2017/306—Surgical pincettes without pivotal connections holding by means of suction
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
本発明は、胃食道フラップ弁の経口的な内視鏡修復用の器具、アセンブリ、および方法を提供する。本発明はさらに、組織固定用の自己誘導および自己閉鎖組織固定器具、および組織をグリップし操作するための重積用器械を提供する。修復器具は、胃内に経口配置するように構成した縦長部材、縦長部材上に設けて、胃の組織を胃食道フラップに対応した形状にする組織成形器、および成形された組織を胃食道フラップと同様の形状に維持する組織固定器具を有する。組織成形器は、型枠を有することができる。胃食道フラップは2cmより長く、その対応する胃の開口部をカバーするのに十分な長さを有することができる。
Description
本発明は一般に、胃食道フラップ弁を修復することによって、胃食道逆流症を治療するための器具、アセンブリ、システム、および方法に関する。本発明はより詳細には、通常の胃食道フラップと同様の形状に胃の組織を引き込み、その形状に組織を固定することによって、胃食道フラップ弁を修復することに関する。
胃食道逆流症(GERD)は、胃の内容物が食道に飛び散らないようにするための胃食道接合部に配置される逆流防止遮蔽部の不良によって生じる慢性的状態である。飛び散り(splashing)は、胃食道逆流として知られている。胃酸は肉を消化するようになっており、食道内に継続的に飛び散ると食道組織を消化してしまう。
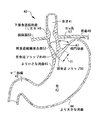
図1は、食道41の下部から十二指腸42までの食道−胃−腸管40の正面断面図である。胃43は、解剖学上の左側ではより大きな湾曲44、解剖学上の右側ではより小さな湾曲45によって特徴付けられる。より大きな湾曲44から遠い部分の胃底(fundus)46は胃43の上部を構成し、ゲップのためのガスおよび気泡を捕獲する。食道管41は胃底46の上部から下の点において胃43に入り、噴門切痕(cardiac notch)47とHis角57として知られる胃底46に対する鋭角を構成する。下部食道括約筋(LES)48は、ゲップのガス、液体、および固体を区別可能な識別括約筋であり、胃底46と共に機能してゲップを行う。胃食道フラップ弁(GEFV)49は、可動部と対向する、より静止した部分を有する。GEFV49の可動部は、食道41と胃43の間の交差部における組織から構成した約180°の半円の胃食道フラップ50(「正常な可動フラップ」または「可動フラップ」とも呼ばれる)である。GEFV49の対向する、より静止した部分は、食道41との接合部に隣接する胃43のより小さな湾曲45の部分を有する。GEFV49の胃食道フラップ50は主に胃43の胃底46に隣接する組織を有し、その最も長い部分は約4〜5cmの長さ(51)を有し、その長さは前方および後方端部において傾斜している。胃食道フラップ50は、胃43と胸部の間の圧力差によって、および部分的にはGEFV49の弾力性および解剖学的構造によって、胃43のより小さな湾曲部45に対して部分的に保持され、バルブ機能を提供する。GEFV49はフラッタ弁と同様であり、胃食道フラップ50は柔軟で、他のより静止した側壁に対して閉鎖できる。
食道管は、飲み込むための口の近くの上部食道括約筋(UES)、および胃におけるLES48とGEFV49によって制御される。正常な逆流防止遮蔽部は協調して作用するLES48とGEFV49によって主に構成され、食物および液体が胃に入ることができ、胃食道組織接合部52を介して、食道48内に胃の内容物が逆流することを妨げる。胃食道組織接合部52の口腔外組織は、それ自体の保護機構によって胃酸から保護されるので、一般に胃の一部と考えられる。胃食道接合部52の口腔組織は一般に食道の一部と考えられ、胃酸による長期曝露による損傷から保護されない。胃食道接合部52においては胃と食道組織の接合部はジグザグの線を構成し、「Zライン」と呼ばれることがある。請求項を含むこの明細書の目的において、「胃」は胃食道接合部52の口腔外組織をも意味する。胃43内の圧力が増大すると、その圧力はGEFV49の正常な胃食道フラップ50を胃のより小さな湾曲部45に対して作用して密閉する。これらの組織は密に対向して逆流を防ぐ。胃43は、胃底46を押し下げ平坦にする横隔膜53によって、一時的に噴門切痕47を直線に、His角57をより鈍角にしてゲップを放出する。GEFV49の正常な胃食道フラップ50が開き、ゲップが食道41内へ通過できるようにする。
図2は、GEFV49のグレードIの正常な状況の可動フラップ50、およびGEFV49のグレードIVの逆流状況の胃食道フラップ55を示す食道−胃−腸管40の正面断面図である。GERDに関連した嘔吐の主な理由は、胃の高圧力に対して閉鎖し密閉するGEFV49の胃食道フラップ55が、機能的に(または逆流状況の)不全となることによる。生活様式を含む理由のために、GEFV49のグレードIの正常な胃食道フラップ50が、グレードIVの低下した(または逆流状況の)胃食道フラップ55に悪化することがある。悪化の解剖学的結果は食道41の一部の移動を含んでおり、それは口方向の胃食道接合部52とLES48が噴門切痕47を真っ直ぐにし、His角57を増大させることを含んでいる。これは胃食道接合部52の口腔外構造を実質的に再成形し、平坦な胃底56を構成する。低下した胃食道フラップ55、著しく低下した胃食道フラップ弁49と噴門切痕47を図に示した。Dr.Hillおよび共同研究者などは等級システムを展開し、GEFVの状況、および患者が慢性酸逆流を経験する可能性を説明した(L.D.Hillらの「胃食道フラップ弁:体外および体内観察」、Gastrointestinal Endoscopy 1996:44:541−547)。Dr.Hillの等級システム下では、グレードIのフラップ弁はGEFV49の正常な可動フラップ50で逆流を最も起こしそうにない場合を示す。GEFV49の低下した胃食道フラップ55は、逆流を最も起こしそうなグレードIVのフラップ弁を示す。グレードIIとIIIは、逆流を経験する可能性が中間のグレードを表す。低下した胃食道フラップ55と下に移動した胃底46によって表される低下したGEFVを備えたグレードIVの状態では、胃の内容物が漏斗状開口部を通して直接食道41内に導かれる。
胃食道フラップ55が低下すると、胃の内容物は食道41、口、および肺にさえ逆流し易くなる。LES48単独では比較的弱く、逆流または嘔吐を単独で妨げる十分な抵抗力はない。最も一般的な現象は胸骨下の胸の焼けるような不快感であるので、嘔吐は「胸焼け」とも呼ばれる。胸内の焼けるような不快感、および口内への酸っぱい胃液の吐き戻し(吐出)は、胃食道逆流症(GERD)の典型的症状である。胃酸が食道に吐き戻されると、食道の収縮および食道の除去、つまり食道の収縮と中性の唾液の洗い落としの組み合わせによって通常は素早く除去される。胃酸が食道41内に頻繁に吐き戻されたり、または適切に除去されない場合、胸焼け(食道41上への胃酸および胆液の逆流)が生じる。慢性的な胸焼けまたはGERDは、GEFV49とLES48の胃食道フラップ55が劣化し、胃酸および消化液を食道41から遠ざけることができなくなる機能不全のために生じる。GEFV49とLES48は、胃43内の正常なより高い圧力を維持し、胃の内容物を食道41から遠ざけることができなくなる。正常な可動フラップ50を備えている人々は、食道41上への胃の内容物の逆流をもたらすGEFV49とLES48の一時的弛緩を時々経験することがある。これらの一時的弛緩は、正常な胃食道フラップ50を備えた人々の胃食道逆流症状の出現および一時的症状の大部分を説明することができる。しかし、GEFV49とLES48の胃食道フラップ55が低下し、胃43内の正常な圧力を機械的に維持できなくなるので、胃の内容物はたやすくそして定期的に食道41を浸すようになる。食道の収縮だけでは食道41から胃の内容物を適切に「除去」するのに十分な強さはなく、食道内に長期の胃酸および胆液の曝露をもたらす。この長期の曝露によって食道の正常な扁平上皮の損傷が発生して食道炎が生じ、一部の人々ではBarrett食道と呼ばれる新しい上皮の発生を伴った食道の治癒が生じる。
GERDのある人々の一部では、合併症が生じる。酸への曝露が長期間繰り返されると、浸食および潰瘍(食道の上皮内の破壊)を備えた食道炎(食道の炎症)が発生することがある。これらの破壊が深い場合、食道が出血し傷跡が残って狭窄が形成されることがある(食道の狭窄)。食道が著しく細くなると、食道内に食物が付着し、その症状は嚥下障害として知られている。GERDは、食道腺癌の成長の最も重要な危険因子の一つとして示されている。重度のGERDを持つ人々の一部では、酸への曝露が続く傷ついた扁平上皮がBarrett’s metaplasia(Barrett食道)、つまり食道腺癌が成長可能な前癌状態の上皮に置き換えられる。現在のところ、Barrett食道を引き起こすものは正確には誰もまだ分かっていない。
GERDの他の合併症は、食道の病気に関連しているようには全く見えないかもしれない。GERDを持つ人々の一部は、肺炎(肺感染症)の再発、ぜんそく(喘鳴)、または食道内に逆流し、上部食道括約筋を介して肺にまで至った酸による慢性の咳を生じることがある。多くの例では、これは人が寝ている夜間に発生する。時には、重度のGERDを持つ人は、窒息感によって眠りから覚めることがある。声帯に到達した酸によって嗄声になり、慢性的炎症または傷を引き起こすこともある。最近では、夜間胃液が口の中に慢性的に逆流した結果として、歯牙浸食(歯肉線に近い歯層の破壊)が認められている。患者は一般に、口内の苦味や窒息のために目を覚ます。
劣化した胃食道フラップ55およびGERDは、治療なしでは決して改善しない。GERDに対しては、薬物療法と手術療法の両方が存在する。薬物療法には、制酸剤とプロトンポンプ阻止薬がある。しかし、薬物療法は逆流を覆い隠すだけである。患者はなお逆流状態になり、肺内に逆流した粒子のために肺気腫になることがある。GERD症状の約10〜15%が、Barrett食道をもたらす。食道上皮は、薬物なしで繰り返し酸に曝されると発癌しやすい組織に変化する。
GERDの治療には、いくつかの開腹および腹腔鏡外科手術が利用できる。一つの外科的方式は、Nissen噴門形成術である。Nissen方式は一般に、胃食道接合部52の周りの胃底を360°包み込むことを含んでいる。この手術は、術後合併症の発生率が高い。Nissen方式は、固定部なしで360°可動フラップを形成する。NissenはLES48を強化するが、GEFV49の正常な可動フラップ50は修復しない。胃底46を用いて修復を行うため、患者はゲップができず、嚥下障害を経験することが頻繁にある。GERDを治療する別の外科的方式は、Belsey Mark IV(Belsey)噴門形成術である。Belsey手術は、胃43の一部を食道41の前面まで縫合することによって、バルブを形成することを含んでいる。それはNissen噴門形成術で遭遇する術後合併症の一部を低減するが、それでもGEFV49の正常な可動フラップ50を修復するわけではない。これらの手術はいずれも正常な解剖学的構造を十分に修復し、胃食道接合部を正常に機能させることはない。別の外科的方式は、Hill修復である。Hill修復手術では、胃食道接合部52を後方の腹部領域に固定し、縫合システムによって180°バルブを形成する。Hill手術は、可動フラップ50、噴門切痕47、およびHis角57を修復する。しかし、これら全ての外科的手術は、腹腔鏡手術であるか開腹手術として行うかどうかにかかわらず非常に侵襲的である。
GERD治療の新しく、より外科的侵襲性が少ない方式には、経口的な内視鏡手術がある。一つの手術はロボットアームを備えた機械器具を想定し、そのロボットアームを経口的に胃43内に挿入する。内視鏡を介して観察しながら、内視鏡医は胃43内に機械を案内し、一方のアーム上の螺旋状器具を用いて、胃底46の一部を接続する。それから、そのアームは接続した部分を引き込み、低下した胃食道フラップ55の近傍の組織のフラップを形成する。機械の別のアームはフラップの底部をつまみ、留め具を駆動したり、それを介して縫合を行ってフラップを固定する。内視鏡医は胃底46の別の部分を接続し、満足なフラップを形成するまで別の留め具を駆動する。つまみおよび留め具の手術は適切な技術での治療手段を提供できるが、正常な胃食道フラップ弁構造を十分に修復することも、正常に機能する胃食道接合部52を形成することもない。その代わり、その手術は逆流の制限に役立つ組織の隆起を形成することができるだけである。さらに、この手術は、内視鏡医の技能、経験、積極性、および勇気に非常に依存している。より臆病な内視鏡医は小さな組織の一部しか取らず、その結果、正常な可動フラップ50として機能するフラップをうまく形成できないことがある。医師の技能、経験および勇気に非常に依存するため、この手術で形成されたフラップは各々異なったものとなる。別の経口手術は、LESを再生するために、劣化した胃食道フラップ55の近傍に胃底部の組織折り畳み部を形成することを想定している。この手術では、その形状および場所を保持するために、折り畳んだ胃底部の周りに複数のU字型の組織クリップを配置する必要がある。既に議論した手術と同様に、この手術も内視鏡医の技能、経験、積極性、および勇気に非常に依存している。さらに、これらの手術および他の手術は、修復に食道組織を含むことがある。食道の組織は脆弱であり、胃食道フラップ弁の修復に食道の組織を含むことは、患者に不必要なリスクを負わせる。
現在の明らかになっている方法は全て、胃または食道組織の適切な量を掴み、想定される構造の深さと幅を構築するために、内視鏡医の技能、経験、および積極性に依存する。これは、患者毎の不均一性および内視鏡医毎の不均一性をもたらす。本来の胃食道フラップ弁および正常に機能する胃食道接合部を修復するために、極めて標準化され均一な器具および手術の必要性がある。
以上の観点から、胃食道フラップ弁を修復するために、新しく改善された器具および方法について技術的な必要性がある。本発明は器具、システム、および方法に関し、それらは胃食道フラップ弁を修復するためのこのような改善された器具および方法を提供する。
本発明は、経口的な胃食道フラップ弁修復器具を提供する。この器具は、胃内に経口配置するように一部分が構成された縦長部材と、胃組織が修復された胃食道フラップ形状になるように前記縦長部材上に設けられた組織成形器、および修復された胃食道フラップを維持する組織固定器具を有する。組織成形器は十分な長さを有してさらに修復された胃食道フラップが十分な長さを有し、その対応する胃開口部をカバーできるようにする。従って、修復される胃食道フラップを2cmより長くするために、成形器は2cmより長い長さを有する。
別の実施例によると、本発明は、胃食道フラップ弁の経口修復方法を提供する。この方法は、2cmより長い組織成形器内に胃組織を引き込み、2cmより長い胃食道フラップと類似の形状に組織を成形し、成形された組織を2cmより長い修復された胃食道フラップと同様の形状に固定するステップを含んでいる。
本発明はさらに、経口的な胃食道フラップ弁修復器具を提供する。この器具は、胃内に経口配置するように一部を構成した縦長部材と、縦長部材上に設けられて胃組織を修復された胃食道フラップ形状にし、2cmより長い修復された胃食道フラップを形成するために2cmより長い長さの組織成形器と、2cmより長い修復された胃食道フラップを維持する組織固定器具とを有する。
組織成形器は好ましくは4cmより長く、例えば、4〜5cmの間の長さを有する。さらに好ましくは、器具の一部は実質的に透明である。
さらに、器具は縦長部材から延びるように構成した組織グリップ部を有し、Zラインの口腔外の組織成形器内に胃組織をグリップし引き込む。組織グリップ部は好ましくは、縦長部材から2〜6cm延びるように構成される。
本発明はさらに別に、経口的な胃食道フラップ弁修復器具を提供し、器具は胃内に経口配置するように一部を構成し、胃食道フラップに関連した表面形状を備えた型枠を設けた縦長部材と、胃組織を非侵襲的にグリップし、型枠と接触させながら押し込む組織成形器を有する。器具はさらに、形成済の胃組織を修復された胃食道フラップと同様の形状に維持する組織固定器具を有する。型枠は、修復された胃食道フラップが十分な長さとなり、対応する胃開口部をカバーするような長さを有する。
型枠は、2cmより長い。好ましくは、型枠は、4〜5cmの長さを有する。組織成形器は好ましくは、型枠と接触させながら組織を引き込む組織グリップ部を有する。縦長部材は、内視鏡に対する方向を維持するように構成したチャネルを有することもできる。
本発明はさらに、胃食道フラップ弁の経口修復の方法を提供する。この方法は、2cmより長い組織成形器内に胃組織を引き込み、2cmより長い胃食道フラップと類似の形状に組織を成形し、成形された組織を2cmより長い修復された胃食道フラップと同様の形状に固定するステップを含んでいる。
本発明はさらに別に、経口的な胃食道フラップ弁修復器具を提供し、この器具は食道を介して胃内に経口配置するように一部分が構成された縦長部材、および縦長部材上に設けられて、胃組織が修復された胃食道フラップ形状になるように成形する組織成形器を有する。器具はさらに、食道を胃に向かって移動させ、組織成形器が胃組織を成形する際に食道を保持する重積用器械(組織を陥入させるための器械;invaginator)、および修復された胃食道フラップを維持する組織固定器具を有する。
器具の一部は、好ましくは実質的に透明な材料から形成される。実質的に透明な材料から形成した器具の一部は、組織成形器や重積用器械を含んでいてもよい。
器具はさらに、縦長部材から延び、胃の組織をグリップし、Zラインの口腔外の組織成形器内に引き込むように構成した組織グリップ部を有することができる。組織グリップ部は、好ましくは縦長部材から2〜6cm延びるように構成される。
本発明はさらに別に、胃食道フラップ弁の経口修復の方法を提供する。この方法は、グレードII、III、IVのフラップ弁を診断し、関連の噴門切痕の近傍の管腔内胃底組織の一部を選択し、その組織を2cmより長い胃食道フラップと類似の形状に成形し、成形された組織を2cmより長い胃食道フラップと同様の形状に固定することを含んでいる。
本発明はさらに別に、胃の胃食道フラップを修復する方法を提供する。この方法は、胃に関連したZラインの口腔外で胃食道フラップと類似の形状に胃の組織を成形し、Zラインの口腔外で胃食道フラップと類似の成形された胃組織を固定することを含んでいる。
この方法は、胃に関連した食道の内面をグリップし、グリップした食道を胃に向かって移動させ、胃の組織を成形し固定する際、食道が動かないように保持することを含むこともできる。グリップするステップは、複数のオリフィスを介した真空を用いて食道をグリップすることを含んでいてもよい。成形された胃組織は、好ましくは2cmより長い胃食道フラップと同様である。
前記器具は実質的に透明材料からなる一部を含むことができ、前記方法は内視鏡を用いた器具を介して、胃および食道の一方を観察する別のステップを含むことができる。固定するステップは、少なくとも一つの留め具を器具から胃組織内に押し込むことを含んでいてもよい。
以降の詳細な説明では本発明の典型的な実施例において、この明細書の一部を構成する添付の図面を参照しつつ説明する。詳細な説明および図面は具体的、典型的な実施例を示し、その典型的な実施例によって発明を実現できる。これらの実施例は十分詳しく説明され、当業者が発明を実現できるようにする。当然のことながら、本発明の精神または範囲から逸脱することなく、他の実施例を用いることも他の変更を行うこともできる。従って、以降の詳細な説明に限定されるものではなく、本発明の範囲は添付の請求項によってのみ定義される。
「一つ」および「その」の意味は、複数の参照を含んでいる。「内」の意味は、「内」および「上」を含んでいる。さらに、他に規定されたり、ここでの開示内容との矛盾がない限り、単一のものへの参照は複数のものへの参照を含んでいる。
図3は、胃食道フラップ弁修復アセンブリ60の部分断面斜視図であり、本発明の一実施例による正常な可動フラップの型枠(これ以降は「型枠」という)70を含んでいる。GEFV修復アセンブリ60は、縦長部材62、体外動作制御部材64、内視鏡チャネル66、圧縮空気ポート68、真空ポート69、型取り面72を備えた型枠70、組織成形器73、複数の組織固定器具80a、80c、および80e、複数の内腔(lumens)82a〜e、および複数の内腔オリフィス84a〜eを有する。
縦長部材62は食道と胃内に経口配置するように設計および構成したフレキシブル構造であり、内視鏡チャネル66と体外動作制御部材64を有する。内視鏡チャネル66は内視鏡器具のシャフトの一定の長さを少なくとも部分的に取り囲み、シャフトの向きを維持し、シャフトに沿って移動可能なように構成される。縦長部材62はさらに複数の内腔82a〜eを有し、各々少なくとも一つの組織固定器具を設け、内腔オリフィスから展開するように構成される。図3は、組織固定器具80a、80c、および80eを設け、内腔オリフィス84a、84c、および84eから展開するための縦長部材62を示している。別の実施例では、より多いまたはより少ない内腔82を用いることもでき、複数の組織固定器具80を展開するために一つの内腔82を構成することもできる。さらに別の実施例では、組織固定器具80は一つまたは複数のチャンバ内に備えられ、そのチャンバから展開することもできる。縦長部材62は胃内に経口配置するために十分な柔軟性と、それによって設けられる構造を操作するために十分な剛性を有する。縦長部材62は胃食道外科用途に適切な任意の材料から構成でき、適切な材料は技術的に知られている任意の生体適合性材料を含んでいる。
体外動作制御部材64は縦長部材62に堅固に取り付けられ、縦長部材62、およびそれによって設けられた任意の構造の縦方向および回転動作を制御するように配置される。制御部材64は圧縮空気ポート66と真空ポート69を設けるように示されているが、これらのポートは縦長部材62上に設けることも、フラップ弁修復アセンブリ60の他の任意の部分上に設けることもできる。制御部材64は、技術的に知られている任意の生体適合材料から構成できる。
型枠70は縦長部材62上に設けて、型取り面72と複数の組織グリップ真空オリフィス74の形態の組織グリップ部を有する。型取り面72はGEFV49の正常な可動フラップ50に関連した約180°の半円形を有し、カップ状の手に似ている。一実施例では、型取り面72は、正常な胃食道フラップ50を複製するように構成される。正常な胃食道フラップ50の観察によって、その外観、寸法、および構成は人々の間で大きな相違はないことが分かっている。型取り面72は固定するために胃組織を型取りするように構成され、型取りされた胃組織を固定し、型枠70から外す際、型取りされた胃組織がGEFV49の正常な胃食道フラップ50と同様の形状と機能を有するようにする。型枠70は縦長部材62上に着脱可能なように設け、異なる型取り面72がGEFV49により近い型取りされた胃組織を提供することが分かった場合は別の型枠70と交換できる。
図3に示した実施例では、組織成形器73は複数の組織グリップ真空オリフィス74を有し、胃組織をGEFV49の正常な胃食道フラップ50に対応した形状にする。真空オリフィス74は、型取り面72の少なくとも一部の上に配置される。真空オリフィス74は、所定の近傍の胃組織を引き込み、型枠70内に押し込み、型取り面72に応じてGEFV49の正常な胃食道フラップ50に対応した形状に、型取りされた胃組織125を成形するように構成される。真空オリフィス74は、真空ポート69と真空内腔79を介して真空源に接続される。真空オリフィス74における真空レベルは、調整器(図示せず)によって制御される。
型枠70は胃食道接合部の近傍に経口配置するための第一構造を有し、その配置は多くの場合は胃43内にある。第一構造は、経口配置するためのサイズの折り畳み形状である。好ましい実施例では折り畳み形状は内視鏡チャネル66を維持し、折り畳まれたフラップ弁修復アセンブリ60は内視鏡によって経口的に案内でき、その端部は胃43内に配置される。型枠70は第二構造を有し、それは図3に示したように、GEFV49の正常な胃食道フラップ50に対応した形状を有する。型枠70は、体内で第一構造から第二構造に変形する。第一構造から第二構造に変形する方法は、圧縮空気を加えて型枠70を膨張させること、および機械的手段を含んでいる。圧縮空気を加えることによって第一構造から第二構造に型枠70を移動させる場合、フラップ弁修復アセンブリ60は圧縮空気ポート68と制御された空気圧を提供する調整器(図示せず)、および膨張可能な部材(図示せず)を有する。膨張可能な部材は空気圧内腔(図示せず)によって制御された空気圧に接続され、空気圧を加えることによって型枠70を第一構造から第二構造に変形させる。型枠70は、第二構造から第三構成に移動させ、患者から取り出し可能なように構成する。第三構成は第一構造と同様であっても、異なっていてもよい。例えば、型枠70は傘を開くように第一構造から第二構造に変形できる。経口的に取り出す場合、型枠70は第一構造に戻すことも、傘が風によって折り返されるように新しい構成に移動することもできる。別の実施例では、型枠70は「自然経路を介して」通過可能な材料を有し、第三構成は「自然経路を介して」、縦長部材62から胃内に型枠70を開放することを含んでいる。型枠70は、技術的に知られた任意の生体適合材料から構成される。「自然経路を介した」通過用に構成する場合、型枠70は消化系内で分解可能または消化可能であり、体外に排出される、または単に体外に排出される材料を有することができる。
好ましい実施例では、GEFVに対応した形状を備えた型枠の一部は透明であり、内視鏡医が組織固定器具82を展開する前に、型取りされた胃組織を視覚的に確認できるようにする。さらに別の実施例では、複数の内腔82a〜eと内腔オリフィス84a〜eは縦長部材62ではなく型枠70内に有することができる。
別の実施例では、型枠70は内視鏡器具に接続し、内視鏡器具を用いて型枠70を操作できる。
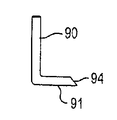
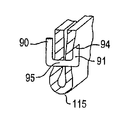
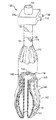
次の一連の図は組織固定器具に関し、それは好ましい実施例の自己誘導および自己閉鎖組織固定器具である。図4は、本発明の一実施例による自己誘導および自己閉鎖組織固定器具(以降は「組織固定器具80」という)の平面図である。図5は図4の組織固定器具の側面図であり、本発明の一実施例による内腔82内で、初期に応力を加えて折り畳まれた構成100で示される。図6〜9は、本発明の一実施例に従って初期の構成100から最終的な構成115に展開し移動させる際の、組織固定器具80の連続的な構成を示している。組織固定器具80は、細長い部材90、第一端部91、第二端部92、接続部93、組織貫通端94、第一接合部95、第二接合部96、加圧部97、および押し込み受け取り部98を有する。
細長い部材90は、一般に応力または歪みの開放、または温度変化に応じて、第一構造から第二構造に変形可能な特性を備えた生体適合材料を有する。適切な材料には、超弾性特性、形状記憶特性、または両方を備えた材料が含まれる。これらの材料には、形状記憶特性と超弾性特性の両方を備えたNitinol、および形状記憶特性を備えたプラスチックが含まれる。細長い部材90は、初期の応力および歪みを有する構成100から、内周105内に取り囲まれた組織を共に保持するように配置された最終的な形状110を有するように形成されている。細長い部材90の全体の長さと厚さは、細長い部材90によって所望の固定を実現するように選択される。例えば、固定される組織折り畳み部(tissue fold)115の種類と厚さ、および提供される固定力の量に応じて長さ部分が選択される。細長い部材90の厚さは、提供される固定力の量に基づいて選択できる。その厚さは、約0.010〜0.050インチの間であってもよい。さらに、最終的な形状110の所望の形状も、材料の長さ部分と厚さ、および最終的な形状110の部分間の湾曲量を決定できる。別の実施例では、最終的な形状110は、一般に長方形、円形、楕円形またはマウンド状であってもよい。さらに別の実施例では、最終的な構成の形状は、一般に螺旋状であってもよい。
初期の応力および歪み構成100は、第一端部91と共に始まる部分が第二端部92の抑圧受領端98上で、押棒99により与えられた力によって内腔オリフィス84から展開する際、組織固定器具80の超弾性や形状記憶特性が、内腔84の近傍の組織折り畳み部115内に細長い部材90を誘導し貫通させる。別の実施例では、組織固定器具80を展開する構造は、細長い部材90の誘導の少なくとも一部を提供するように構成できる。組織固定器具80の展開は、図6〜9に示されている。内腔82から完全に押し出されると、細長い部材90は図9に示した最終的な構成110となるように自己閉鎖する。最終的な構成110では、細長い部材90は組織折り畳み部115を共に保持する内周105を構成し、組織折り畳み部115を周囲内に取り囲む。最終的な構成110では、加圧部97は第一端部91と第二端部92に対向し、それらの間に組織折り畳み部115を固定する。最終的な構成110の内周105は、所望の固定の実現に必要な度合だけ閉鎖することもできる。別の構成では、第一端部91は図9に示したように、最終的な構成110の第二端部92に隣接させる。さらに別の実施例では、細長い部材90は最終的な構成110の実質的に閉じた周囲を構成する。
図10は図3のGEFV修復アセンブリ60の断面斜視図であり、本発明の一実施例による内視鏡可視化器具120を用いて、経口的に胃食道フラップ弁を修復するために用いられる。内視鏡可視化は、GEFVを修復する好ましい実施例において用いられる。他の好ましい実施例では、X線透視装置(fluoroscope)または嚥下可能(swallowable)なカメラ等の他の可視化技術を用いることもできる。図10に示したように、GEFVを経口的に修復する第一ステップは、食道41を介して胃43内にフレキシブル内視鏡120を進めることを含んでいる。内視鏡120は反転させ、食道41が胃43と接合する領域を遠端122の観察素子が示すようにする。観察用の内視鏡は技術的によく知られており、一般に照射素子と観察素子を備え、この場合は操作者が胃43等の体腔内を観察できるようにする。図10に示した様に、本発明の実施例の目的においては、内視鏡可視化器具(以降は単に「内視鏡」という)120は、胃食道フラップ弁を経口的に修復するために用いられる他の器具とは別の機器であってもよい。内視鏡120は、例えば、縦長部材62を案内する等、胃食道フラップ弁を経口的に修復するために用いられる他の器具と共に協調動作できる。
最初のステップでは、型枠70を設けた縦長部材62を内視鏡120のシャフト上でスライドさせ、内視鏡120の近端に配置する。別のステップでは、内視鏡120の遠端122の観察素子を胃43内に配置し反転させて、食道41が胃43と接合する領域の観察を実現する。GEFV型枠70は、経口配置用の第一構造では、案内としての内視鏡120のシャフトに沿って、縦長部材62をスライドさせることによって胃43内に下げる。いったん胃43に入ると、GEFV型枠70はその第一構造から、GEFV49に対応した形状を備えた第二構造に変形する。別のステップは、内視鏡120のシャフトに沿って患者の頭および食道41に向かって上向きに、型枠移動矢印123によって示した方向に、型枠70が劣化した胃食道フラップ55(図示せず)に近い位置、および噴門切痕47に近い胃底46の位置に、型枠70を移動させることを含んでいる。この移動は、内視鏡120を用いて可視化しながら行う。真空は、真空内腔79と、複数の組織グリップ真空オリフィス74に加えられる。真空オリフィス74は、筋−粘膜組織の折り畳み部115をグリップし、押し込み、型枠70内に引き込み、型取り面72に対して組織折り畳み部115を保持する。これは、GEFV49の正常な胃食道フラップ50等の胃食道フラップ(以降は「型取りされた胃組織」という)125に対応した形状に、組織折り畳み部115を成形する。一般に、組織折り畳み部115は、食道41の隣接部に対して折り畳んだ噴門切痕47の近傍の胃底46の壁組織を含んでいる。組織折り畳み部115は組織の厚さ全体の折り畳みとして示されているが、組織折り畳み部115は一層または二層等の組織の全体の厚さより少なくてもよい。型取りされた胃組織125を固定する前に、型取りされた胃組織125は内視鏡120を用いて、型枠70の透明部を介して観察し、内視鏡医の期待にかなうことを確認する。
胃食道フラップ弁と同様の形状に型取りされた胃組織125を固定し締め付けるために、図5〜9と共に説明した方法で内腔オリフィス84から少なくとも一つの組織固定器具80が展開される。組織固定器具80は一般に、胃43内に型枠70を挿入する前に縦長部材62の内腔82内に事前に装填される。一般に、複数の組織固定器具80が用いられる。別の実施例では、組織固定器具80は、「M」、「C」または他のパターン等の適切な固定を提供するパターンに展開し、繰り返すこともできる。別の実施例では、組織固定器具は、接着剤、または組織の再生や接着を誘発する物質であり、別個に展開することも機械的組織固定器具80と共に展開することもできる。共に使用する場合、接着剤または誘発物質が組織折り畳み部115の組織間に塗布され、組織を互いによりしっかりと貼り合わせ、接着面積を増大させ、密着性を改善して固定場所を密閉する。
別のステップは、内視鏡120のシャフトに沿って矢印123とは反対の下向きの患者の足に向かって、食道41および修復された胃食道フラップ弁から離れるように、内視鏡120の遠端122を用いて、固定した型取りされた胃組織125を検査できる場所に型枠70を移動させることを含んでいる。内視鏡医が検査中、許容可能な修復された胃食道フラップ127が形成されているとの確認ができない場合、型枠70は別の組織固定器具80を配置する位置、または追加の型取りされた組織125の生成および固定を行う位置に戻すことができる。
最終的なステップは、患者から型枠70を取り出すことを含んでいる。型枠70は第二構造から経口的に取り出すための第三構成に変形し、縦長部材62を除去することによって患者から取り出す。別の実施例では、型枠70は、「自然経路を介した」つまり自然な過程によって通過可能な材料を有する。型枠70は、「自然経路を介した」通過用に縦長部材62から胃内に開放され、縦長部材62は患者から取り外される。さらに別の実施例では、型枠70は固定した型取りされた胃組織125と一時的に接続したまま残され、修復されたGEFV129の機能をサポートし、治癒中にそれを保護できる。型枠70は、所定の時間経過すると分解するように構成されている。
型枠70は組織折り畳み部115のサイズを設定し、正常な胃食道フラップ50と同様の型取りされた胃組織125に前記組織折り畳み部115を成形するので、上記のステップは比較的均一に成形した組織折り畳み部115をもたらすと期待される。型枠70はこれらのパラメータを標準化して設定されるので、内視鏡医が組織折り畳み部115を形成するためにどのくらいの組織を取るかを決定する必要はない。
上記の手術は内視鏡120と共に用いるが、内視鏡120のシャフト上を移動されない、またはシャフトによって物理的に案内されない縦長部材62と型枠70を用いて行うこともできる。別の実施例では、器具上に適切な観察マークを備えたX線透視法等の他の可視化法を用いることもできる。
図11は、本発明の一実施例による修復された胃食道フラップ127と、修復されたGEFV129の断面斜視図である。図11は、この明細書で説明した発明の実施例のいずれか一つによって形成した修復された胃食道フラップ127を示しており、例えば、図10の実施例の場合の型枠70と縦長部材62が胃食道接合部の近傍から取り除かれている。少なくとも一つ組織固定器具80、および好ましくは複数の組織固定器具80は、修復された胃食道フラップ127として型取りされた胃組織125を維持する。修復された胃食道フラップ50は好ましくは十分な長さ151を有し、胃の開口部をカバーできる。開口部は、例えば、2cmの直径を有するが、一部の患者ではさらに長い場合もある。従って、長さ151は、好ましくは2cmより長い。2cmより長い、例えば、4〜5cmの長さを有すれば、全てではないが大部分の患者に対して十分な閉鎖機能をほぼ確保できる。この目的のために、型枠70の型取り面72は十分な長さ153を有し、2cmより長い、例えば、4〜5cmの胃組織折り畳み部を形成でき、従って、それ自体、対応する2cmより長い、例えば、4〜5cmの長さを有する。グレードII、IIIまたはIVのフラップ弁であると診断された場合は常に、十分に機能的なGEFVを修復しなければならず、それは2cmより長い、好ましくは4〜5cmの長さのフラップ弁を有する。従って、修復された胃食道フラップ127は正常な胃食道フラップ50の動作および機能とほぼ同様であり、図1と共に説明された正常な胃食道フラップ50と同様に、胃43のより小さな湾曲部45に対して開閉する。このようにして形成した修復されたGEFV129は、図1と共に説明された正常なGEFV49の機能と同様になる。図10と共に説明された型取りする過程は、非常に標準化された手術および結果を生じると期待される。型取りする過程の別の利点は、バルブフラップの長さを注意深く制御し、手術の結果に基づいて正常なGEFV49の機能を再設定できることである。フラップを形成するための接着や、取り付け器具の生分解を待つ必要はない。
修復された胃食道フラップ127と修復されたGEFV129の形成に加えて、図10と共に説明した発明の実施例は図2で説明したGERDに対応した他の劣化の少なくとも一部も修復する。修復されたGEFV125の形成はさらに噴門切痕47を少なくとも部分的に修復し、His角57をさらに鋭角にする。これは、胃底46の上部を口に向かって食道41が胃43に入る部分から離れるように動かし、正常な胃底46のアーチを修復する。これは、空気やガスをゲップする患者の能力を修復することが期待される。胃の内容物は、グレードIIIまたはIVの逆流状況の胃食道フラップ55と同様に、もはや食道41内に漏斗状構造を通って提供されないので、これはさらに胃の内容物が食道内に逆流する度合を低減することも期待される。
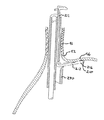
図12は、本発明の一実施例による重積用器械130の部分断面斜視図である。重積用器械130は、重積用器械縦長部材132、重積用器械体外動作制御部材134、内視鏡チャネル136、圧縮空気ポート138、真空ポート139、重積用器械−縦長部材結合器140、重積用器械面142、縦方向上昇部143、複数の組織グリップ真空オリフィス144、重積用器械部材146、膨張部材147、空気圧内腔148、および複数の真空内腔149を含んでいる。
重積用器械アセンブリ130は、食道や腸等の体腔および中空の身体構造の壁をグリップするように構成したフレキシブル構造である。それは、内視鏡配置用にも構成されている。縦長部材132の内視鏡チャネル136は、内視鏡器具のシャフトの一定の長さを少なくとも部分的に取り囲み、シャフトに対する向きを維持してシャフトに沿って移動可能なように構成される。重積用器械130は任意の体腔または中空構造での使用について広範囲の用途を有するが、その特徴はGEFVの修復に関連して食道組織陥入用の好ましい実施例について説明する。重積用器械アセンブリ130は食道内に経口的に内視鏡配置するように構成され、内視鏡チャネル136と体外動作制御部材134を有する。内視鏡器具のシャフトの一定の長さを取り囲むように構成することに加えて、内視鏡チャネル136は図3に示したフラップ弁修復アセンブリ60の縦長部材62の一定の長さを少なくとも部分的に取り囲み、縦長部材62の向きを維持して縦長部材62に沿って移動可能に構成する。縦長部材132は、胃内に経口配置するための十分な柔軟性と、それによって設けられ、それと逆に移動される構造を操作するための十分な剛性を有する。縦長部材62は、技術的に知られている任意の生体適合材料から構成できる。
体外重積用器械動作制御部材134は縦長部材132に取り付けられ、縦長部材132、および重積用器械部材146を含む、それによって設けられた機器の動作を制御するように構成する。制御部材134は、圧縮空気ポート138と真空ポート139を有する。制御部材134は圧縮空気ポート138と真空ポート139を設けるように示されているが、これらのポートは重積用器械縦長部材132上に設けることも、重積用器械アセンブリ130の他の部分上に設けることもできる。制御部材134は、技術的に知られている任意の生体適合材料から構成できる。
重積用器械部材146とその部品は、重積用器械−縦長部材結合器140を介して、重積用器械縦長部材132に結合される。重積用器械部材146は、任意の形状を有することができる。好ましい実施例では、重積用器械部材146は経口的挿入を容易にするために一般に円筒形状であり、膨張部材147、空気圧内腔148、および真空内腔149を有することができる。重積用器械部材146はさらに、複数の縦方向上昇部143を備えた重積用器面142を有する。少なくとも一つの縦方向上昇部143は複数の組織グリップ真空オリフィス144の形態の組織グリップ部を有し、オリフィス144は縦方向上昇部143の下層にあって真空内腔149によって提供される。オリフィスは、例えば4〜8mmの直径を有することができる。図12では、簡略化のために、一つの縦方向上昇部143だけに参照番号を設けている。複数の組織グリップ真空オリフィス144は、重積用器械部材146と食道の壁を取り外し可能で密に接続することによって組織を引き込み、グリップするように構成される。いったん接続すると、重積用器械アセンブリ130を用いて真空グリップされた食道組織に力を加えて、内視鏡医が選択した方向に食道41の接続した部分を押し付けることができる。組織グリップ真空オリフィス144は、真空ポート139と真空内腔149を介して真空源に接続される。組織グリップ真空オリフィス144における真空レベルは、調整器(図示せず)によって制御される。別の実施例では、重積用器械部材146は膨張可能でなくてもよく、一般的に円筒形状の構造の一部だけであってもよい。例えば、重積用器械部材146は図3の縦長部材63上に設けて、食道の内周のほぼ半分だけと接続するように構成される。別の実施例では、重積用器械組織グリップ部は、クロスカントリースキーの基材上で用いられるものと同様の魚の鱗状の構造や、複数の突出部等の非侵襲的に摩擦力により組織と接続するように構成した周辺面を有することができる。
陥入部材146は口を介して食道内に下げ、LES48の近傍内に経口的に配置するための第一構造を有する。第一構造は、経口配置するために設計された折り畳み形状である。好ましい実施例では、折り畳み形状は内視鏡チャネル136を維持し、内視鏡シャフトを介して折り畳んだ重積用器械部材146を経口的に案内できる。重積用器械部材146は第二構造を有し、その第二構造は食道41の断面寸法に対応した形状を有する。重積用器械部材146は、体内で第一構造から第二構造に変形される。第一構造から第二構造に変形する方法は、圧力を加えて膨張部材147を拡大すること、および機械的手段を含んでいる。圧力は、圧縮空気または圧縮流体によって供給できる。本発明の一実施例は、空気圧を加えて膨張させて膨張部材146を拡大し、重積用器械部材146を第一構造から第二構造に変形させることを含むように示されている。重積用器械130は、圧縮空気ポート138、制御された空気圧を提供するための調整器(図示せず)、および膨張部材147を有する。膨張部材147は空気圧内腔148を介して制御された空気圧に接続され、空気圧を加えることによって、重積用器械部材146を第一構造から第二構造に変形させる。重積用器械部材146は第二構造から第三構成に変形させ、患者から取り出すように構成される。第三構成への変形は、膨張部材147から空気圧を開放することによるものであってもよい。第三構成は、第一構造と同様であってもよい。重積用器械部材146は、技術的に知られた任意の生体適合材料から構成される。別の実施例では、重積用器械130は内視鏡器具と結合し、内視鏡器具を用いて重積用器械130を操作できる。さらに別の実施例では、重積用器械は実質的に透明な材料または透明材料から構成し、GEFV修復手術中により良好な可視化を可能にする。例えば、内視鏡120を部分的に引き戻すことによって、Zラインの可視化や、食道をグリップするオリフィス144の可視化を実現できる。このような可視化は、Zラインの口腔外のGEFVの修復の確保や食道固定の確認に役立つ。
図13は、図3のGEFV修復アセンブリ60と図12の重積用器械アセンブリ130の部分断面図であり、本発明の一実施例による内視鏡可視化器具120を用いて、経口的に胃食道フラップ弁を修復するために用いられている。図13は、胃食道フラップ弁の経口的修復用のGEFV修復アセンブリ60と共に、食道41の移動および食道41上での制御を実現する重積用器械130を示している。内視鏡120のシャフトの患者の口に向かう部分、重積用器械の縦長部材132、および縦長部材62は、簡略化のために図13では削除されている。手術は、図10と共に説明したものと同様である。好ましくは、矢印123の方向に患者の頭に向かって型枠70を移動させる前に、配置するために第一構造の重積用器械部材146を備えた重積用器械130を食道41内に下げる。重積用器械縦長部材132は、好ましくはLES48から患者の口に向かう位置への案内として、内視鏡120のシャフト、およびGEFV修復アセンブリ60の縦長部材62と接続し、それに沿ってスライドさせる。
食道に真空接続するために、膨張部材147に空気を加えることによって重積用器械部材146を第一構造から第二構造に生体内で変形させる。別のステップは、縦方向上昇部143内の真空内腔149と、対応する複数の組織グリップ真空オリフィス144に真空を加えることを含んでいる。加えた真空に応じて、複数の組織グリップ真空オリフィス144は食道壁を吸い込み、重積用器械部材146と取り外し可能にかつ密に接続する。陥入動作方向162の力は重積用器械の体外動作制御部134に加えられ、食道41の下側部分と胃食道接合部52(図示せず)を胃43に向かって押し部分的に陥入させる。これは一般に胃組織、部分的に胃底46の一部をGEFVの修復のために改善された位置に移動させる。陥入は胃底の組織を部分的に予備成形し、型枠70への胃底の組織の位置および提示を改善することによって、組織折り畳み部115の形成に役立つ。内視鏡医は、グレードIVのGEFVを修復する際、組織折り畳み部115を形成するために重積用器械130を必要とすることがある。重積用器械130は、グレードIIまたはグレードIIIのGEFVを修復する場合は必要でないことがある。いったん修復されたGEFV129が形成されると、患者から取り出すために第二位置から第三位置に重積用器械部材146を移動させ、重積用器械130を取り出す。
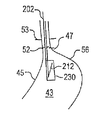
次の三つの図は、本発明の別の実施例による別の胃食道フラップ弁修復器具を示している。図14と16は、本発明の一実施例による可動組織グリップ部を備えた胃食道フラップ弁修復アセンブリ200の部分断面斜視図である。図14は、延長した構成の可動組織グリップ部210を備えたGEFV修復アセンブリ200を示している。図15は、図14の型枠230の断面平面図である。図16は、収縮/型取り構成の可動組織グリップ部210を備えたGEFV修復アセンブリ200を示している。GEFV修復アセンブリ200は、縦長部材202、内視鏡チャネル66、非侵襲性組織グリップ部210、組織グリップ部制御部材211、真空ポート139、可動アーム212、複数の組織グリップオリフィス214、真空グリップ面216、湾曲部218、型枠230、湾曲案内面232、および型取り面234を有する。図14と16は内視鏡120と縦長部材202の体外部分は示しておらず、それらは簡略化のために削除されている。
縦長部材202は、図3と共に説明したGEFV修復アセンブリ60の縦長部材62と実質的に同様である。縦長部材202は、胃内に配置するための遠端上に型枠230と可動アーム212を設けられる。簡略化のために、図14と16では複数の内腔オリフィス84a〜eから展開するための組織固定器具80を設けるように構成した複数の内腔82a〜eは示しておらず、体外動作制御部材64も示していない。
組織グリップ部210は、組織グリップ部制御部材211、真空ポート139、可動アーム212、複数の組織グリップ真空オリフィス214、真空グリップ面126、および湾曲部218を有する。組織グリップ部制御部材211は、縦長部材202の内腔(図示せず)内に設けられる。湾曲部218は組織グリップ部制御部材211と可動アーム212を接合し、約90°の範囲で湾曲させるように構成する。アーム212には真空グリップ面216を設け、さらに複数の組織グリップ真空オリフィス214を設ける。組織グリップ真空オリフィス214は、可動アーム212、湾曲部218、および制御部材211を通過する真空内腔(図示せず)を介して、真空ポート139に結合される。別の実施例では、真空の結合は湾曲部218をバイパスする真空内腔を有する。複数の組織グリップ真空オリフィス214は、近傍の組織を引き込み、真空グリップ面216と取り外し可能なように密に接続することによって、組織をグリップするように構成される。いったん接続されると、組織グリップ部210を用いて真空グリップした組織に力を与えて、内視鏡医が選択した方法でグリップした組織および周りの組織を押し付けることができる。
組織グリップ部210の可動アーム212は、縦長部材202に対して動作制御部材211によって縦方向に移動可能なように配置される。図14は、組織をグリップするために延長した構成の可動アーム212を備えた組織グリップ部210を示している。図16は、収縮/型取り構成の組織グリップ部210の可動アーム212を示している。可動アーム212は、組織グリップ部制御部材211を型枠230に向かって、遠方に縦方向に移動させることによって、図14の延長した構成から図16に示した収縮/型取り構成に変形される。制御部材211の動作は湾曲案内面232に対して可動アーム212を遠方方向に強制し、さらに湾曲部218に対して湾曲力を及ぼす。制御部材211の連続的な動作は湾曲部218の湾曲を増大させ、可動アーム212を収縮/型取り構成に移動させる。湾曲案内面232は縦長部材202に対して可動アーム212の位置を制御するように配置され、収縮/型取り構成の可動アーム212が縦長部材202の近傍の組織折り畳み部115を保持し、型取り面234内に接するように引き込まれる。可動アーム212の延長は、制御部材211を近くに移動させることによって行われる。組織グリップ部210は、組織折り畳み部115を非侵襲的にグリップし、型枠230内に移動させるように構成される。組織グリップ部210は、固定するために組織折り畳み部115内の組織を互いに密にパックする。別の実施例では、可動アーム212の型取り構成は、真空グリップ面216が湾曲案内面232から遠方の位置になるように、そして一定の距離だけ遠方に真空グリップ面216を移動させる。別の実施例では、組織グリップ部210は、縦長部材62を備えた組織グリップ部210によって、図3の型枠70内に組織折り畳み部115を引き込むように構成できる。
図15は、縦長部材202の遠端上に設けられた型枠230を示している。内視鏡120と組織グリップ部210は、簡略化のために図15から削除されている。型枠230は半円形の構造であり、湾曲案内面232と型取り面234を有し、胃組織が胃食道フラップに対応した形状になるように構成される。型取り面234は、正常な胃食道フラップ50に対応した約180°の半円形を有する。別の実施例では、型取り面234は、約90〜360°の間の半円の円弧を備えた半円形構造を形成するように構成できる。型取り面234は、組織グリップ部210によって内部に引き込んだ組織折り畳み部115を有し、組織折り畳み部115を型取りされた胃組織125に成形するように構成する。型取り面234は、正常な胃食道フラップ50を複製するように構成される。別の実施例では、型枠230は胃43内に経口配置するための第一の折り畳み構成と、胃食道フラップに対応した形状を備えた第二構造を有する。
図17〜22は、図14〜16の組織グリップ部200を備えたGEFV修復アセンブリを示す概略断面図であり、本発明の一実施例に従って、胃食道フラップ弁を経口的に修復するために用いられる。修復は図10と共に説明したものと同様であり、可視化のため、および胃43内の縦長部材202の遠端に配置するための案内として内視鏡120を用いる。図17は最初のステップを示しており、そこでは組織グリップ部210と型枠230を設けた縦長部材202の遠端を胃43内に配置する。可動アーム212は挿入用の第一構造であって、それは収縮/型取りの構造である。
図18は中間ステップを示しており、そこでは第一の収縮/型取り構成位置から第二のグリップ構成に可動アーム212を移動させ、組織折り畳み部115をグリップし移動させる。可動アーム212の動作は、組織グリップ部制御部材211の操作によって行う。内視鏡120の可視化の下で、可動アーム212は胃底46の目標組織の近傍に配置し、その目標組織は噴門切痕47の近傍にあり、GEFV49の修復に適切なように内視鏡医によって選択される。真空は組織グリップ真空オリフィス214に加え、目標組織を引き込み、取り外し可能なように接続された真空によって、真空グリップ面216に目標組織をグリップさせる。真空グリップした目標組織とその近傍の組織は、組織折り畳み部115を形成する。
図19は中間ステップを示しており、そこでは目標組織を真空グリップしながら、可動アーム212を第二のグリップ構成から第一の収縮/型取り構成に、型枠230に向かって部分的に移動される。図20は別の中間ステップを示しており、目標組織を真空グリップしながら、さらに第一の収縮/型取り構成に移動させて部分的に型枠230内に配置される。
図21はさらに別の中間ステップを示しており、ここでは目標組織を真空グリップしている間、可動アーム212は第一の収縮/型取り構成まで型枠230内に十分移動される。図21に示したように、型枠230内に十分移動させる際、型枠230の型取り面234は密接した組織折り畳み部115を含む組織を持ってきて、組織折り畳み部115を胃食道フラップ(型取りされた胃組織125)に対応した形状にする。組織折り畳み部115は、胃食道接合部52、または胃食道接合部52の口腔組織を含んでいない。型取りされた胃組織125を固定し締め付けるために、図5〜9、および10と共に説明したように、内腔オリフィス84(図示せず)から少なくとも一つの固定器具80を展開する。固定は、図11に示したように、胃食道フラップ(修復された胃食道フラップ127)と同様の形状に型取りされた胃組織を維持する。図22は最終的なステップを示しており、そこでは内視鏡医が観察するために、型枠230と可動アーム212を胃43内の遠方に移動させる。最終的なステップは、患者から型枠230と可動アーム212を取り除くことを含んでいる。
図23は、本発明の一実施例による収縮/型取り構成において、組織グリップ案内部を備えた胃食道フラップ弁修復アセンブリ250の部分断面斜視図である。胃食道フラップ弁修復アセンブリ250は構成および動作において、フラップ弁修復アセンブリ200と同様である。修復アセンブリ250は案内支持部254と案内面256を有するが、図14の型枠230は含んではいない。修復アセンブリ250は組織成形器として組織グリップ部210を用いて、胃組織を胃食道フラップ50に対応した形状にする。案内支持部254は縦長部材202上に設けられ、案内面256は縦長部材202に対して、可動アーム212の位置を制御するように構成し、収縮/型取り構成の可動アーム212に縦長部材202の近傍の組織折り畳み部115を保持させる。
図24は、図23の胃食道フラップ弁修復アセンブリ250を示す断面図であり、本発明の一実施例に従って、胃食道フラップ弁を経口的に修復するために用いられている。胃食道フラップ弁修復アセンブリ250を用いた胃食道フラップの修復は、図17〜22と共に説明したフラップ弁修復アセンブリ200を用いて、胃食道フラップを修復することと同様である。修復は図21において異なり始め、この点において可動アーム212は収縮/型取り構成であり、初期の成形位置258の縦長部材202の近傍の組織折り畳み部115を保持している。図24に示したように、縦長部材202と可動アーム212はこの実施例の組織成形器となり、グリップした胃組織を胃食道フラップに対応した形状にする。複数の組織グリップのステップを用いて、組織折り畳み部115を胃食道フラップに対応した形状にする。この目的のために可動アーム212は、既に述べたように好ましくは2cmより長く、例えば、4〜5cmの間の長さを有し、対応する長さのフラップを形成するが、より長いものを用いることもできる。少なくとも一つの組織固定器具80は、初期の成形位置258において組織折り畳み部115内に展開される。複数の組織グリップ真空オリフィス214に加えた真空は、組織折り畳み部115から組織グリップ面216を離脱させるために低減し、組織折り畳み部115から可動アーム212を移動させることができる。組織グリップ部210と案内支持部254を設けた縦長部材202は、別の成形位置259まで回転される。複数の組織グリップ真空オリフィス214に再び真空を加え、真空グリップ面216を組織折り畳み部115と接続し、可動アーム212を収縮/型取りの構造に変形させる。少なくとも一つの組織固定器具80は、別の成形位置259において組織折り畳み部115内に展開される。胃食道フラップと同様の形状に組織を移動、成形および固定することは、修復された胃食道フラップ127が形成されるまで継続する。修復状態は反転させた内視鏡から観察し、内視鏡医は各ステップを検査できる。図11に示したように、修復されたGEFV49が形成されていることを、いったん内視鏡医が確認すると、最終的なステップにおいて患者から胃食道フラップ弁修復アセンブリ250が取り除かれる。
図25は、図14〜16の胃食道フラップ弁修復アセンブリの部分断面斜視図であり、本発明の一実施例に従って、内視鏡器具の一部が体内にあるとき、内視鏡器具の体外部を接続するように構成されている。図26は、胃食道フラップ弁修復アセンブリ300の部分断面斜視図である。胃食道フラップ弁修復アセンブリ300は保持部304を含む縦長部材302を有し、別の実施例では少なくとも一つの他の保持部306を有する。
縦長部材302の内視鏡チャネル66は円形であるが、その長さに沿って閉じてはおらず、反転させた端部122が体内にあるとき、内視鏡器具120のシャフト部分と修復アセンブリ300を取り外し可能なように接続できる。縦長部材302の内視鏡チャネル66は、内視鏡器具120のシャフトの一定の長さまたは一部を部分的に取り囲むように設計される。保持部304と306は縦長部材302を内視鏡器具120のシャフトと接続でき、内視鏡医が離脱させるまで接続を維持し、接続した内視鏡120のシャフトに対して縦長部材302を移動可能にする。別の実施例では、胃食道フラップ弁修復アセンブリ300は複数の縦方向楔(shims)を有し、内視鏡チャネル66の直径を内視鏡シャフトの直径に適合させる。
胃食道フラップ弁修復アセンブリ300の縦長部材302を内視鏡120のシャフトと接続する機能によって、内視鏡医はまず胃43とGEFV49を内視鏡的に観察し、修復が望ましいかどうかを決定する。修復が望ましい場合、内視鏡医は胃43から内視鏡122の反転した先端(遠端)を取り出すことなく、縦長部材302を内視鏡120のシャフトと接続できる。それから、胃食道フラップ弁修復アセンブリ300を内視鏡120のシャフトの下に移動させ、胃食道フラップの修復用の位置内に下げる。
胃から内視鏡を反転させた先端を取り出すことなく、胃食道フラップ弁修復アセンブリの縦長部材を内視鏡と接続する機能を提供する構成は、この明細書で説明した器具のいずれのものに対しても用いることができる。図3の部材64等の体外動作制御部材は、内視鏡120のシャフトを内視鏡チャネル66に十分入れることができる開口部を必要としてもよい。
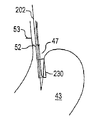
ここで図27〜31を参照すると、図27は組織グリップ部210が胃底46をグリップするために、上向きおよび外向きに到達可能にする最初の位置の可動アーム212を示している。以降で分かるように、胃底46用のこの「到達」によって、修復されたGEFVはZライン52の完全に口腔外になる。
図28は、胃底46と接続している組織グリップ部210を示している。「到達」可能にするための可動アーム212は、例えば、3〜6cm、好ましくは4〜5cmの一定の長さ寸法を有し、例えば、図11に示したように、2cmより長い修復済みGEFVフラップをもたらす。真空接続面216は、可動アーム212と制御部材211によって形成した組織成形器内に、胃底46を十分に接続する。
図29は、アーム212と部材211によって形成された成形器内に最初に引き込んだ胃底46を示している。この最初の動作は部材211の下向きの動作によって発生し、アーム212を型枠230の型取り面234に接続する。
図30は、部材211が下向きに移動し続ける際、胃底46が部材211とアーム212によって形成された成形器内に引き込まれ続けることを示している。さらに、当然のことながら、ほぼ修復されたGEFVフラップはZライン52の完全な口腔外である。これは、既に説明したように、組織グリップ部210の「到達」によって可能になる。型枠230はさらに、アーム212が湾曲部218の周りを回転する際、部材211とアーム212の組織成形器を胃底部上に接近させ続ける。
図31は、その構成を維持するために成形された胃底部を固定する前の修復されたGEFVフラップを示している。当然のことながら、修復されたGEFVフラップ構成は、部材211とアーム212の成形器、および型枠230の型取り面234との胃底部の接触によって規定されている。さらに、当然のことながら、こうして形成したGEFVフラップは完全にZライン52の口腔外である。従って、組織界面57は、完全に漿膜間胃底組織界面である。
以上の実施例では、器具200の一部は透明または実質的に透明であってもよく、例えば、手術中にZラインをより良好に可視化できる。この目的のために、縦長部材202や部材211およびアーム212は、透明材料から構成できる。
本発明は、所定の好ましい実施例を参照しながらかなり詳しく説明してきたが、他の実施例も可能である。従って、添付の請求項の趣旨または範囲は、この明細書に含まれる実施例の説明に限定されるべきではない。本発明は、添付の特許請求の範囲内に存在するものである。
新規である本発明の特徴は、添付の特許請求の範囲に述べる。本発明は、他の目的および利点と共に、添付の図面と関連させた前記詳細な説明を参照することによって最も理解することができる。いくつかの図面では同様の参照番号は同様の構成要素を示す。
食道の下側部分から十二指腸までの食道−胃−腸管の正面断面図である。
食道−胃−腸管の正面断面図であり、胃食道フラップ弁のグレードIの正常な状況の可動フラップ、および胃食道フラップ弁のグレードIVの逆流状況の胃食道フラップを示している。
本発明の一実施例による胃食道フラップ弁修復アセンブリの部分断面斜視図であり、正常な可動フラップの型枠を含んでいる。
本発明の一実施例による自己誘導および自己閉鎖組織固定器具の平面図である。
図4の自己誘導および自己閉鎖組織固定器具の側面図であり、内腔内でその初期の応力を加えて折り畳んだ構成で設けられている。
〜
初期の構成から最終的な構成まで展開し移動させる際の、自己誘導および自己閉鎖組織固定器具の連続的な構成を示している。
図3の胃食道フラップ弁修復アセンブリの断面斜視図であり、本発明の一実施例による内視鏡可視化器具を用いて胃食道フラップ弁を経口的に修復するために用いられる。
本発明の一実施例による修復された胃食道フラップと、修復された胃食道フラップ弁の断面斜視図である。
本発明の一実施例による重積用器械の部分断面斜視図である。
図3の胃食道フラップ弁修復アセンブリと図12の陥入アセンブリの断面斜視図であり、本発明の一実施例による内視鏡可視化器具を用いて胃食道フラップ弁を経口的に修復するために用いられる。
本発明による延長した構成において、可動組織グリップ部を備えた胃食道フラップ弁修復アセンブリの部分断面斜視図である。
図14の型枠の断面平面図である。
本発明の一実施例による収縮/型取り構成において、可動組織グリップ部を備えた図14の胃食道フラップ弁修復アセンブリの部分断面斜視図である。
〜
図14〜16の胃食道フラップ弁修復アセンブリを示す連続的な概略断面図であり、本発明の一実施例による胃食道フラップ弁を経口的に修復するために用いられる。
本発明の一実施例による収縮/型取り構成において、組織グリップ案内部を備えた胃食道フラップ弁修復アセンブリの部分断面斜視図である。
図23の胃食道フラップ弁修復アセンブリを示す断面図であり、本発明の一実施例による胃食道フラップ弁を経口的に修復するために用いられる。
図14〜16の胃食道フラップ弁修復アセンブリの部分断面斜視図であり、本発明の一実施例による内視鏡器具の一部が生体内にあるとき内視鏡器具の体外部を接続するように構成されている。
図25の胃食道フラップ弁修復アセンブリの部分断面斜視図である。
〜
胃食道フラップ弁を修復中の図14〜16のアセンブリを示すより詳細な連続断面図である。
Claims (30)
- 経口的な胃食道フラップ弁(valve)修復器具であって、
胃内に経口配置するように一部分が構成された縦長部材と、
胃組織が修復された胃食道フラップ形状になるように前記縦長部材上に設けられた組織成形器であって、修復された胃食道フラップが2cmより長くなるようにするために、前記組織成形器の長さが2cm以上である組織成形器と、
2cmより長い長さを有する修復された胃食道フラップを維持する組織固定器具と、を有する胃食道フラップ弁修復器具。 - 組織成形器が、4cmより長い請求項1記載の器具。
- 組織成形器が、4〜5cmの長さを有する請求項2記載の器具。
- 器具の一部分が実質的に透明である請求項1記載の器具。
- さらに、縦長部材から延び、胃組織をグリップし、組織成形器のZラインの口腔外に引き込むように構成された組織グリップ部を有する請求項1記載の器具。
- 前記組織グリップ部が、縦長部材から2〜6cm延びるように構成された請求項5記載の器具。
- 経口的な胃食道フラップ弁修復器具であって、
胃内に経口配置するように一部分が構成され、胃食道フラップに対応する表面形状を備えた型枠を設けた縦長部材と、
胃組織を非侵襲的にグリップし、型枠と接触させながら押し込む組織成形器と、
型取りされた胃組織を、修復された胃食道フラップと同様の形状に維持する組織固定器具を有し、
型枠が一定の長さを備え、修復された胃食道フラップを十分な長さにして、対応する胃の開口部をカバーさせる胃食道フラップ弁修復器具。 - 前記型枠が、2cmより長い請求項7記載の器具。
- 前記型枠が、4〜5cmの長さを有する請求項8記載の器具。
- 前記組織成形器が組織グリップ部を有し、型枠に接触させながら組織を引き込む請求項7記載の器具。
- 前記縦長部材が、内視鏡の方向を維持するように構成されたチャネルを有する請求項7記載の器具。
- 器具の一部分が透明材料からなる請求項7記載の器具。
- 前記組織グリップ部が、縦長部材から延び、胃組織をグリップし、Zラインの口腔外の型枠に接触させながら組織を引き込むように構成された請求項7記載の器具。
- 前記組織グリップ部が、縦長部材から2〜6cm延びるように構成された請求項13記載の器具。
- 胃食道フラップ弁の経口的な修復方法であって、
2cmより長い組織成形器内に胃組織を引き込み、
2cmより長い胃食道フラップと同様の形状に組織を成形し、
成形された組織を2cmより長い修復された胃食道フラップと同様の形状に固定するステップを含む方法。 - 成形するステップが、組織を型取りすることを含む請求項15記載の方法。
- 胃食道フラップが、4〜5cmの長さを有する請求項15記載の方法。
- 経口的な胃食道フラップ弁修復器具であって、
食道を介して、胃内に経口配置するように一部分が構成された縦長部材と、
縦長部材上に設けられ、修復された胃食道フラップの形状になるように胃組織を成形する組織成形器と、
組織成形器が胃組織を成形する際、胃に向かって食道を移動させ、食道を保持する重積用器械(組織を陥入させるための器械;invaginator)と、
修復された胃食道フラップを維持する組織固定器具を有する器具。 - 器具の一部分が実質的に透明材料からなる請求項18記載の器具。
- 実質的に透明材料から構成された器具の一部分が、組織成形器を含む請求項18記載の器具。
- 実質的に透明材料から構成された器具の一部分が、重積用器械を含む請求項18記載の器具。
- さらに、縦長部材から延び、胃組織をグリップし、Zラインの口腔外の組織成形器内に引き込むように構成された組織グリップ部を有する請求項18記載の器具。
- 縦長部材から2〜6cm延びるように、組織グリップ部が構成された請求項22記載の器具。
- 胃食道フラップ弁の経口的な修復方法であって、
グレードII、III、またはIVのフラップ弁を診断し、
対応する噴門切痕(cardiac notch)の近傍の内腔(intraluminal)の胃底部組織の一部を選択し、
2cmより長い胃食道フラップと類似の形状に組織を成形し、
成形された組織を2cmより長い胃食道フラップと同様の形状に固定することを含む方法。 - 胃の胃食道フラップの修復方法であって、
胃に対応したZラインの口腔外で、胃食道フラップと同様の形状に胃組織を成形し、
Zラインの口腔外で、成形された胃組織を胃食道フラップと同様に固定することを含む方法。 - さらに、胃に対応した食道の内面をグリップし、グリップした食道を胃に向かって移動させ、胃組織を成形し固定する際、食道を静的に保持するステップを含む請求項25記載の方法。
- グリップするステップが、複数のオリフィスを介して、真空を用いて食道をグリップすることを含む請求項26記載の方法。
- 成形された胃組織が、2cmより長い胃食道フラップと同様である請求項25記載の方法。
- 器具が実質的に透明な材料からなる一部を有し、内視鏡を備えた器具を介して、胃と食道の一方を観察する別のステップを含む請求項25記載の方法。
- 固定するステップが、器具から胃組織内に少なくとも一つの留め具を押し込むことを含む請求項25記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/921,787 US20050085829A1 (en) | 2002-05-17 | 2004-08-18 | Transoral endoscopic gastroesophageal flap valve restoration device, assembly, system and method |
| PCT/US2005/029614 WO2006023764A2 (en) | 2004-08-18 | 2005-08-18 | Transoral endoscopic gastroesophageal flap valve restoration device, assembly, system and method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008510522A true JP2008510522A (ja) | 2008-04-10 |
Family
ID=35968224
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007528052A Withdrawn JP2008510522A (ja) | 2004-08-18 | 2005-08-18 | 経口的な内視鏡胃食道フラップ弁修復器具、アセンブリ、システムおよび方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20050085829A1 (ja) |
| EP (1) | EP1781185A4 (ja) |
| JP (1) | JP2008510522A (ja) |
| CN (1) | CN101291631A (ja) |
| WO (1) | WO2006023764A2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009056106A (ja) * | 2007-08-31 | 2009-03-19 | Olympus Corp | 処置具案内具 |
| JP2016047475A (ja) * | 2008-10-10 | 2016-04-07 | ミルックス・ホールディング・エスエイ | Gerdを治療するための装置 |
| JP2018198978A (ja) * | 2008-10-10 | 2018-12-20 | インプランティカ・パテント・リミテッド | Gerdを治療するためのシステム |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7220266B2 (en) | 2000-05-19 | 2007-05-22 | C. R. Bard, Inc. | Tissue capturing and suturing device and method |
| DE60143801D1 (de) * | 2000-08-11 | 2011-02-17 | Univ Temple | Behandlung von fettleibigkeit |
| US7737109B2 (en) * | 2000-08-11 | 2010-06-15 | Temple University Of The Commonwealth System Of Higher Education | Obesity controlling method |
| US6960233B1 (en) * | 2002-12-10 | 2005-11-01 | Torax Medical, Inc. | Methods and apparatus for improving the function of biological passages |
| US7695427B2 (en) | 2002-04-26 | 2010-04-13 | Torax Medical, Inc. | Methods and apparatus for treating body tissue sphincters and the like |
| US6790214B2 (en) * | 2002-05-17 | 2004-09-14 | Esophyx, Inc. | Transoral endoscopic gastroesophageal flap valve restoration device, assembly, system and method |
| US20060009792A1 (en) * | 2004-02-20 | 2006-01-12 | Esophyx, Inc. | Tissue fixation assembly having prepositioned fasteners and method |
| US8961540B2 (en) | 2004-02-20 | 2015-02-24 | Endogastric Solutions, Inc. | Tissue fixation assembly having prepositioned fasteners and method |
| US7632287B2 (en) | 2004-02-20 | 2009-12-15 | Endogastric Solutions, Inc. | Tissue fixation devices and assemblies for deploying the same |
| US20050187565A1 (en) | 2004-02-20 | 2005-08-25 | Baker Steve G. | Tissue fixation devices and a transoral endoscopic gastroesophageal flap valve restoration device and assembly using same |
| US20060116697A1 (en) | 2004-11-30 | 2006-06-01 | Esophyx, Inc. | Flexible transoral endoscopic gastroesophageal flap valve restoration device and method |
| US8088132B2 (en) * | 2004-12-21 | 2012-01-03 | Davol, Inc. (a C.R. Bard Company) | Anastomotic outlet revision |
| US20060167481A1 (en) | 2005-01-25 | 2006-07-27 | Esophyx, Inc. | Slitted tissue fixation devices and assemblies for deploying the same |
| US20070005082A1 (en) | 2005-06-29 | 2007-01-04 | Esophyx, Inc. | Apparatus and method for manipulating stomach tissue and treating gastroesophageal reflux disease |
| US20070038232A1 (en) | 2005-08-12 | 2007-02-15 | Kraemer Stefan J M | Apparatus and method for securing the stomach to the diaphragm for use, for example, in treating hiatal hernias and gastroesophageal reflux disease |
| US20070088373A1 (en) | 2005-10-18 | 2007-04-19 | Endogastric Solutions, Inc. | Invaginator for gastroesophageal flap valve restoration device |
| US20070112363A1 (en) * | 2005-11-15 | 2007-05-17 | Endogastric Solutions, Inc. | Apparatus including multiple invaginators for restoring a gastroesophageal flap valve and method |
| US9161754B2 (en) | 2012-12-14 | 2015-10-20 | Endogastric Solutions, Inc. | Apparatus and method for concurrently forming a gastroesophageal valve and tightening the lower esophageal sphincter |
| EP1938758B1 (en) | 2006-12-28 | 2018-08-29 | Olympus Corporation | Endoscopic treatment tool |
| EP2104458A4 (en) * | 2007-01-08 | 2014-12-31 | Endogastric Solutions | CONNECTED FASTENERS, SUPPLY DEVICE AND METHOD |
| WO2009097585A1 (en) | 2008-02-01 | 2009-08-06 | Endometabolic Solutions, Inc. | Methods and devices for performing gastroplasty |
| US8906037B2 (en) * | 2009-03-18 | 2014-12-09 | Endogastric Solutions, Inc. | Methods and devices for forming a tissue fold |
| US12059149B2 (en) * | 2011-09-09 | 2024-08-13 | Endogastric Solutions, Inc. | Methods and devices for manipulating and fastening tissue |
| US9572571B2 (en) | 2011-09-09 | 2017-02-21 | Endogastric Solutions, Inc. | Methods and devices for manipulating and fastening tissue |
| US8915929B2 (en) * | 2011-09-09 | 2014-12-23 | Endogastric Solutions, Inc. | Methods and devices for manipulating and fastening tissue |
| US9955957B2 (en) | 2011-09-09 | 2018-05-01 | Endogastric Solutions, Inc. | Methods and devices for manipulating and fastening tissue |
| US20140214063A1 (en) * | 2013-01-31 | 2014-07-31 | Olympus Medical Systems Corp. | Operative method for lumen |
| CN108495582B (zh) * | 2015-09-03 | 2020-10-02 | 海王星医疗公司 | 用于使内窥镜穿过小肠推进的器械 |
| US10966717B2 (en) * | 2016-01-07 | 2021-04-06 | Covidien Lp | Surgical fastener apparatus |
| CN110191667B (zh) | 2016-08-18 | 2022-06-03 | 海王星医疗公司 | 用于增强小肠视觉效果的装置和方法 |
| US12059128B2 (en) | 2018-05-31 | 2024-08-13 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| CN112714658A (zh) | 2018-07-19 | 2021-04-27 | 海王星医疗公司 | 动态刚性化复合医疗结构 |
| US11793392B2 (en) | 2019-04-17 | 2023-10-24 | Neptune Medical Inc. | External working channels |
| US11744443B2 (en) | 2020-03-30 | 2023-09-05 | Neptune Medical Inc. | Layered walls for rigidizing devices |
| US20230346205A1 (en) | 2022-04-27 | 2023-11-02 | Neptune Medical Inc. | Multi-lumen port adapter manifold devices and methods of use |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3875928A (en) * | 1973-08-16 | 1975-04-08 | Angelchik Jean P | Method for maintaining the reduction of a sliding esophageal hiatal hernia |
| US4271828A (en) * | 1979-09-13 | 1981-06-09 | Angelchik Jean P | Method for maintaining the reduction of a sliding esophageal hiatal hernia |
| US4595007A (en) * | 1983-03-14 | 1986-06-17 | Ethicon, Inc. | Split ring type tissue fastener |
| US4784577A (en) * | 1986-09-02 | 1988-11-15 | Critikon, Inc. | Pump pressure sensor |
| US5314473A (en) * | 1989-07-20 | 1994-05-24 | Godin Norman J | Prosthesis for preventing gastric reflux into the esophagus |
| US5006106A (en) * | 1990-10-09 | 1991-04-09 | Angelchik Jean P | Apparatus and method for laparoscopic implantation of anti-reflux prosthesis |
| US5088979A (en) * | 1990-10-11 | 1992-02-18 | Wilson-Cook Medical Inc. | Method for esophageal invagination and devices useful therein |
| US5197649A (en) * | 1991-10-29 | 1993-03-30 | The Trustees Of Columbia University In The City Of New York | Gastrointestinal endoscoptic stapler |
| US5254126A (en) * | 1992-06-24 | 1993-10-19 | Ethicon, Inc. | Endoscopic suture punch |
| WO1994003142A1 (en) * | 1992-07-30 | 1994-02-17 | Temple University - Of The Commonwealth System Of Higher Education | Direct manual cardiac compression device and method of use thereof |
| US5403326A (en) * | 1993-02-01 | 1995-04-04 | The Regents Of The University Of California | Method for performing a gastric wrap of the esophagus for use in the treatment of esophageal reflux |
| US5571116A (en) * | 1994-10-02 | 1996-11-05 | United States Surgical Corporation | Non-invasive treatment of gastroesophageal reflux disease |
| DE69517153T2 (de) * | 1994-11-02 | 2001-02-01 | Olympus Optical Co., Ltd. | Mit endoskop funktionierendes instrument |
| CH688174A5 (fr) * | 1995-03-28 | 1997-06-13 | Norman Godin | Prothèse pour s'opposer au reflux gastrique dans l'oesophage. |
| US6119913A (en) * | 1996-06-14 | 2000-09-19 | Boston Scientific Corporation | Endoscopic stapler |
| US5887594A (en) * | 1997-09-22 | 1999-03-30 | Beth Israel Deaconess Medical Center Inc. | Methods and devices for gastroesophageal reflux reduction |
| US6086600A (en) * | 1997-11-03 | 2000-07-11 | Symbiosis Corporation | Flexible endoscopic surgical instrument for invagination and fundoplication |
| US6254642B1 (en) * | 1997-12-09 | 2001-07-03 | Thomas V. Taylor | Perorally insertable gastroesophageal anti-reflux valve prosthesis and tool for implantation thereof |
| CA2331502A1 (en) * | 1998-05-11 | 1999-11-18 | Surgical Connections, Inc. | Devices and methods for treating e.g. urinary stress incontinence |
| US6264700B1 (en) * | 1998-08-27 | 2001-07-24 | Endonetics, Inc. | Prosthetic gastroesophageal valve |
| WO2000032137A1 (en) * | 1998-08-31 | 2000-06-08 | Wilson-Cook Medical Inc. | Anti-reflux esophageal prosthesis |
| US6159146A (en) * | 1999-03-12 | 2000-12-12 | El Gazayerli; Mohamed Mounir | Method and apparatus for minimally-invasive fundoplication |
| US6098629A (en) * | 1999-04-07 | 2000-08-08 | Endonetics, Inc. | Submucosal esophageal bulking device |
| US6821285B2 (en) * | 1999-06-22 | 2004-11-23 | Ndo Surgical, Inc. | Tissue reconfiguration |
| US6835200B2 (en) * | 1999-06-22 | 2004-12-28 | Ndo Surgical. Inc. | Method and devices for tissue reconfiguration |
| US6663639B1 (en) * | 1999-06-22 | 2003-12-16 | Ndo Surgical, Inc. | Methods and devices for tissue reconfiguration |
| US6494888B1 (en) * | 1999-06-22 | 2002-12-17 | Ndo Surgical, Inc. | Tissue reconfiguration |
| US6517477B1 (en) * | 2000-01-27 | 2003-02-11 | Scimed Life Systems, Inc. | Catheter introducer system for exploration of body cavities |
| US6592596B1 (en) * | 2000-05-10 | 2003-07-15 | Scimed Life Systems, Inc. | Devices and related methods for securing a tissue fold |
| US20020082621A1 (en) * | 2000-09-22 | 2002-06-27 | Schurr Marc O. | Methods and devices for folding and securing tissue |
| US7727246B2 (en) * | 2000-12-06 | 2010-06-01 | Ethicon Endo-Surgery, Inc. | Methods for endoluminal treatment |
| US6716226B2 (en) * | 2001-06-25 | 2004-04-06 | Inscope Development, Llc | Surgical clip |
| US6916332B2 (en) * | 2001-05-23 | 2005-07-12 | Scimed Life Systems, Inc. | Endoluminal fundoplication device and related method for installing tissue fastener |
| US6790214B2 (en) * | 2002-05-17 | 2004-09-14 | Esophyx, Inc. | Transoral endoscopic gastroesophageal flap valve restoration device, assembly, system and method |
| US20040044364A1 (en) * | 2002-08-29 | 2004-03-04 | Devries Robert | Tissue fasteners and related deployment systems and methods |
| US7083630B2 (en) * | 2002-08-29 | 2006-08-01 | Scimed Life Systems, Inc. | Devices and methods for fastening tissue layers |
-
2004
- 2004-08-18 US US10/921,787 patent/US20050085829A1/en not_active Abandoned
-
2005
- 2005-08-18 EP EP05787816.7A patent/EP1781185A4/en not_active Withdrawn
- 2005-08-18 JP JP2007528052A patent/JP2008510522A/ja not_active Withdrawn
- 2005-08-18 CN CNA200580035673XA patent/CN101291631A/zh active Pending
- 2005-08-18 WO PCT/US2005/029614 patent/WO2006023764A2/en active Application Filing
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009056106A (ja) * | 2007-08-31 | 2009-03-19 | Olympus Corp | 処置具案内具 |
| JP2016047475A (ja) * | 2008-10-10 | 2016-04-07 | ミルックス・ホールディング・エスエイ | Gerdを治療するための装置 |
| JP2018198978A (ja) * | 2008-10-10 | 2018-12-20 | インプランティカ・パテント・リミテッド | Gerdを治療するためのシステム |
| JP2020114509A (ja) * | 2008-10-10 | 2020-07-30 | インプランティカ・パテント・リミテッド | Gerdを治療するためのシステム |
| JP2022033345A (ja) * | 2008-10-10 | 2022-02-28 | インプランティカ・パテント・リミテッド | Gerdを治療するためのシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1781185A2 (en) | 2007-05-09 |
| CN101291631A (zh) | 2008-10-22 |
| US20050085829A1 (en) | 2005-04-21 |
| WO2006023764A3 (en) | 2007-12-06 |
| WO2006023764A2 (en) | 2006-03-02 |
| EP1781185A4 (en) | 2014-01-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008510522A (ja) | 経口的な内視鏡胃食道フラップ弁修復器具、アセンブリ、システムおよび方法 | |
| US11627968B2 (en) | Invaginator for gastroesophageal flap valve restoration device | |
| EP2371300B1 (en) | Transoral endoscopic gastroesophageal flap valve restoration assembly | |
| ES2290043T3 (es) | Aparato para el tratamiento de la patologia del reflujo gastro-esofagico. | |
| EP1919371B1 (en) | Apparatus for securing the stomach to the diaphragm |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20081104 |