JP2008290704A - 傾斜表面上での垂直離陸及び着陸方法 - Google Patents
傾斜表面上での垂直離陸及び着陸方法 Download PDFInfo
- Publication number
- JP2008290704A JP2008290704A JP2008042051A JP2008042051A JP2008290704A JP 2008290704 A JP2008290704 A JP 2008290704A JP 2008042051 A JP2008042051 A JP 2008042051A JP 2008042051 A JP2008042051 A JP 2008042051A JP 2008290704 A JP2008290704 A JP 2008290704A
- Authority
- JP
- Japan
- Prior art keywords
- inclined surface
- landing
- uav
- unmanned aircraft
- flight control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 18
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical compound C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 claims abstract description 35
- 230000005484 gravity Effects 0.000 claims description 8
- 230000007246 mechanism Effects 0.000 abstract description 6
- 238000010586 diagram Methods 0.000 description 10
- 238000013500 data storage Methods 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 241000408659 Darpa Species 0.000 description 1
- 241000269799 Perca fluviatilis Species 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/20—Rotorcraft characterised by having shrouded rotors, e.g. flying platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
- B64D45/04—Landing aids; Safety measures to prevent collision with earth's surface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/13—Propulsion using external fans or propellers
- B64U50/14—Propulsion using external fans or propellers ducted or shrouded
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/04—Control of altitude or depth
- G05D1/06—Rate of change of altitude or depth
- G05D1/0607—Rate of change of altitude or depth specially adapted for aircraft
- G05D1/0653—Rate of change of altitude or depth specially adapted for aircraft during a phase of take-off or landing
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/08—Control of attitude, i.e. control of roll, pitch, or yaw
- G05D1/0808—Control of attitude, i.e. control of roll, pitch, or yaw specially adapted for aircraft
- G05D1/0858—Control of attitude, i.e. control of roll, pitch, or yaw specially adapted for aircraft specially adapted for vertical take-off of aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/20—Vertical take-off and landing [VTOL] aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/80—UAVs characterised by their small size, e.g. micro air vehicles [MAV]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
- B64U30/26—Ducted or shrouded rotors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U70/00—Launching, take-off or landing arrangements
- B64U70/80—Vertical take-off or landing, e.g. using rockets
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【解決手段】離陸及び着陸モードが、垂直離陸及び着陸(VTOL)無人航空機(UAV)の飛行制御システムに付加される。離陸及び着陸モードは、飛行制御システム及びVTOL−UAVの既存の制御表面及びスロットル制御に利用できるデータを使用する。その結果、VTOL−UAVは、傾斜表面上でUAVを平行にするように設計された着陸ギヤを使用することなく、傾斜表面上で離陸及び着陸を行うことができる。
【選択図】図4
Description
着陸飛行制御モード
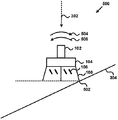
図2は、傾斜部上での垂直着陸のための方法200のフローチャートである。ブロック202において、UAV100は既存の飛行制御モードの下に垂直下降を開始する。図3は傾斜表面304の上方で垂直下降302しているVTOL−UAV100の絵図300である。
離陸飛行制御モード
図7は、傾斜表面304からの(図6に示すような)垂直離陸602のための方法700のフローチャートである。ブロック702において、UAV100はオペレータから発進指令を受け取る。発進制御を受け取ったとき、離陸飛行制御モードが開始される。離陸飛行制御モードは好ましくは飛行制御システム110により実行されるソフトウエアプログラムである。
Claims (3)
- 傾斜表面上に無人航空機を着陸させる方法であって、
傾斜表面の上方で垂直に下降させる工程と;
傾斜表面により生じる圧力差を検出する工程と;
圧力差により生じる運動に対抗する工程と;
無人航空機が傾斜表面に接触した時点を検出する工程と;
無人航空機が傾斜表面に接触したときに、無人航空機が傾斜表面に着陸してしまうまで、無人航空機を回転させる工程と;を組み合わせてなる方法。 - 傾斜表面から無人航空機を垂直に離陸させる方法であって、
発進指令を受け取る工程と;
姿勢方位を決定する工程と;
重力に対抗するように無人航空機の羽根を方位決めする工程と;
傾斜表面から無人航空機の着陸ギヤを引き離すように推力を増大させる工程と;
傾斜表面から実質上垂直に上昇させる工程と;を組み合わせてなる方法。 - 傾斜表面上での垂直離陸及び着陸のための方法であって、
傾斜表面に対して実質上垂直に最初に上昇するように無人航空機の少なくとも1つの羽根及び推力を調整するような離陸モードを、無人航空機の飛行制御システムに提供する工程と;
無人航空機が着陸してしまうまで、接触地点のまわりで無人航空機を回転させるように、無人航空機が接触地点で傾斜表面に接触してしまったことを検出したときに、無人航空機の少なくとも1つの羽根及び推力を調整するような着陸モードを、無人航空機の飛行制御システムに提供する工程と;を有することを特徴とする方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/752,497 US7871044B2 (en) | 2007-05-23 | 2007-05-23 | Method for vertical takeoff from and landing on inclined surfaces |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008290704A true JP2008290704A (ja) | 2008-12-04 |
| JP2008290704A5 JP2008290704A5 (ja) | 2011-04-07 |
Family
ID=39561797
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008042051A Pending JP2008290704A (ja) | 2007-05-23 | 2008-02-22 | 傾斜表面上での垂直離陸及び着陸方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US7871044B2 (ja) |
| EP (1) | EP1995174A3 (ja) |
| JP (1) | JP2008290704A (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011230756A (ja) * | 2010-04-27 | 2011-11-17 | Honeywell Internatl Inc | 地上近接性センサ |
| WO2014068982A1 (ja) * | 2012-10-31 | 2014-05-08 | 国立大学法人徳島大学 | 搬送装置および飛行体の制御方法 |
| KR101447809B1 (ko) | 2013-03-22 | 2014-10-08 | 김명호 | 그립형 이착륙 장치가 구비된 무인항공기 시스템 |
| CN104330071A (zh) * | 2014-10-14 | 2015-02-04 | 南昌航空大学 | 一种控制小型无人直升机平稳起飞的预检测方法 |
| JP2016043927A (ja) * | 2014-08-26 | 2016-04-04 | パロット | 投げスタートにおける回転翼の無人機を動的に制御する方法 |
| KR20160125589A (ko) * | 2015-04-21 | 2016-11-01 | 순천대학교 산학협력단 | 소형 무인비행체의 비행 자세 안정화 시스템 |
| JP2017526566A (ja) * | 2014-06-26 | 2017-09-14 | アマゾン テクノロジーズ インコーポレイテッド | 無人飛行体における地面効果を利用した表面検出 |
| WO2019168079A1 (ja) * | 2018-02-28 | 2019-09-06 | 株式会社ナイルワークス | 安全性を向上した農業用ドローン |
| JP2020131779A (ja) * | 2019-02-14 | 2020-08-31 | 株式会社Ihi | 飛行体 |
| US10817000B2 (en) | 2016-09-13 | 2020-10-27 | Fujitsu Limited | Unmanned aerial vehicle and control method of unmanned aerial vehicle |
| WO2021053929A1 (ja) * | 2019-09-17 | 2021-03-25 | ソニー株式会社 | 飛行体、制御方法及びプログラム |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8200375B2 (en) | 2008-02-12 | 2012-06-12 | Stuckman Katherine C | Radio controlled aircraft, remote controller and methods for use therewith |
| US8878111B2 (en) | 2009-02-24 | 2014-11-04 | Blue Origin, Llc | Bidirectional control surfaces for use with high speed vehicles, and associated systems and methods |
| US8386095B2 (en) * | 2009-04-02 | 2013-02-26 | Honeywell International Inc. | Performing corrective action on unmanned aerial vehicle using one axis of three-axis magnetometer |
| US20100302359A1 (en) | 2009-06-01 | 2010-12-02 | Honeywell International Inc. | Unmanned Aerial Vehicle Communication |
| FR2973335B1 (fr) * | 2011-03-29 | 2013-04-19 | Inst Superieur De L Aeronautique Et De L Espace | Micro/nano vehicule aerien commande a distance comportant un systeme de roulage au sol, de decollage vertical et d'atterrissage |
| US9547991B2 (en) | 2013-05-23 | 2017-01-17 | Honeywell International Inc. | Aircraft precision approach and shipboard landing control system and method |
| CN103543744B (zh) * | 2013-09-10 | 2016-04-27 | 江苏省地质勘查技术院 | 一种无人驾驶飞艇航空磁测飞行航线布置的方法 |
| EP2902319B1 (en) | 2014-01-30 | 2019-06-26 | The Boeing Company | Unmanned aerial vehicle |
| CN103869817A (zh) * | 2014-03-03 | 2014-06-18 | 东南大学 | 一种倾转四旋翼无人机垂直起降控制方法 |
| JP6123032B2 (ja) * | 2014-03-27 | 2017-04-26 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 支援された離陸 |
| US9033276B1 (en) * | 2015-01-07 | 2015-05-19 | TLL Associates | Telescoping landing leg system |
| TW201643579A (zh) * | 2015-06-15 | 2016-12-16 | 鴻海精密工業股份有限公司 | 無人飛行載具自動啟動系統及方法 |
| CN105059558B (zh) * | 2015-07-16 | 2018-02-02 | 珠海云洲智能科技有限公司 | 无人船载无人机起降系统 |
| US9448562B1 (en) * | 2015-08-18 | 2016-09-20 | Skycatch, Inc. | Utilizing acceleration information for precision landing of unmanned aerial vehicles |
| US9740200B2 (en) | 2015-12-30 | 2017-08-22 | Unmanned Innovation, Inc. | Unmanned aerial vehicle inspection system |
| US9513635B1 (en) * | 2015-12-30 | 2016-12-06 | Unmanned Innovation, Inc. | Unmanned aerial vehicle inspection system |
| US9613538B1 (en) | 2015-12-31 | 2017-04-04 | Unmanned Innovation, Inc. | Unmanned aerial vehicle rooftop inspection system |
| CN105480413B (zh) * | 2016-02-03 | 2019-01-22 | 英华达(上海)科技有限公司 | 无人旋翼机及控制无人旋翼机的飞行方法 |
| US9994307B2 (en) * | 2016-03-25 | 2018-06-12 | The United States Of America As Represented By Secretary Of The Navy | Vertical take-off-and-landing unmanned aerial vehicle system capable of landing on uneven or sloped terrain |
| US11029352B2 (en) | 2016-05-18 | 2021-06-08 | Skydio, Inc. | Unmanned aerial vehicle electromagnetic avoidance and utilization system |
| EP3464069A4 (en) * | 2016-06-01 | 2019-12-04 | Blue Origin, LLC | AGILITY PROPELLERS FOR DIFFICULT METEOROLOGICAL CONDITIONS AND ASSOCIATED SYSTEMS AND METHODS |
| CN105974931B (zh) * | 2016-06-30 | 2019-04-09 | 西安电子科技大学 | 一种用于无人机着陆显示仪表的显示系统 |
| CN106647785B (zh) * | 2016-11-16 | 2020-07-14 | 深圳市元征科技股份有限公司 | 无人机停机坪控制方法及装置 |
| KR101867737B1 (ko) * | 2016-12-23 | 2018-06-15 | 주식회사 포스코 | 구조물 부식 진단 및 예방용 드론 |
| US10822122B2 (en) | 2016-12-28 | 2020-11-03 | Blue Origin, Llc | Vertical landing systems for space vehicles and associated methods |
| US10099802B2 (en) | 2017-02-14 | 2018-10-16 | Honeywell International Inc. | Methods and systems to detect and alert a dynamic rollover condition for an aircraft |
| CN108873930B (zh) * | 2018-05-31 | 2021-09-10 | 苏州市启献智能科技有限公司 | 基于移动平台的无人机起降方法及系统 |
| US10625876B2 (en) * | 2018-08-08 | 2020-04-21 | Aurora Flight Sciences Corporation | Aircraft landing systems and methods for monitoring a vertical landing of an aircraft |
| CN109634296A (zh) * | 2018-12-18 | 2019-04-16 | 南京航空航天大学 | 基于鲁棒伺服控制理论的小型无人机弹射起飞控制系统及方法 |
| WO2020158136A1 (ja) * | 2019-02-01 | 2020-08-06 | パナソニックIpマネジメント株式会社 | 無人飛行体、情報処理方法およびプログラム |
| WO2022113087A1 (en) * | 2020-11-30 | 2022-06-02 | Efix Aviation Ltd | Rotorcraft |
| WO2022226932A1 (zh) * | 2021-04-29 | 2022-11-03 | 深圳市大疆创新科技有限公司 | 无人飞行器 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11115896A (ja) * | 1997-10-17 | 1999-04-27 | Komatsu Ltd | 操作自在な無人低速飛翔体 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1389617A (fr) * | 1964-01-09 | 1965-02-19 | Nord Aviation | Machine volante non habitée |
| US3857533A (en) * | 1974-01-28 | 1974-12-31 | S Mason | Helicopter self-leveling landing gear |
| US4062507A (en) * | 1977-02-03 | 1977-12-13 | Felder Donald W | Slope landing compensator system |
| EP0752634A1 (en) * | 1995-07-07 | 1997-01-08 | Sacom Co., Ltd | Apparatus for controlling the attitude of a radio-controlled helicopter |
| FR2758790B1 (fr) * | 1997-01-27 | 1999-05-07 | Sci Chaneac Et Fils | Amelioration d'un aeronef a decollage vertical |
| US6604706B1 (en) | 1998-08-27 | 2003-08-12 | Nicolae Bostan | Gyrostabilized self propelled aircraft |
| IL138695A (en) * | 2000-09-26 | 2004-08-31 | Rafael Armament Dev Authority | Unmanned mobile device |
| US7032861B2 (en) | 2002-01-07 | 2006-04-25 | Sanders Jr John K | Quiet vertical takeoff and landing aircraft using ducted, magnetic induction air-impeller rotors |
| US7857254B2 (en) * | 2004-12-22 | 2010-12-28 | Aurora Flight Sciences Corporation | System and method for utilizing stored electrical energy for VTOL aircraft thrust enhancement and attitude control |
| US7946528B2 (en) * | 2005-04-15 | 2011-05-24 | Urban Aeronautics, Ltd. | Flight control system especially suited for VTOL vehicles |
-
2007
- 2007-05-23 US US11/752,497 patent/US7871044B2/en not_active Expired - Fee Related
-
2008
- 2008-02-21 EP EP08101858.2A patent/EP1995174A3/en not_active Withdrawn
- 2008-02-22 JP JP2008042051A patent/JP2008290704A/ja active Pending
-
2010
- 2010-11-18 US US12/949,410 patent/US8141823B2/en not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11115896A (ja) * | 1997-10-17 | 1999-04-27 | Komatsu Ltd | 操作自在な無人低速飛翔体 |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011230756A (ja) * | 2010-04-27 | 2011-11-17 | Honeywell Internatl Inc | 地上近接性センサ |
| WO2014068982A1 (ja) * | 2012-10-31 | 2014-05-08 | 国立大学法人徳島大学 | 搬送装置および飛行体の制御方法 |
| JPWO2014068982A1 (ja) * | 2012-10-31 | 2016-09-08 | 国立大学法人徳島大学 | 搬送装置および飛行体の制御方法 |
| KR101447809B1 (ko) | 2013-03-22 | 2014-10-08 | 김명호 | 그립형 이착륙 장치가 구비된 무인항공기 시스템 |
| US10410527B2 (en) | 2014-06-26 | 2019-09-10 | Amazon Technologies, Inc. | Ground effect based surface sensing using propellers in automated aerial vehicles |
| US10984663B2 (en) | 2014-06-26 | 2021-04-20 | Amazon Technologies, Inc. | Ground effect based surface sensing utilized with other sensing technologies in automated aerial vehicles |
| JP2017526566A (ja) * | 2014-06-26 | 2017-09-14 | アマゾン テクノロジーズ インコーポレイテッド | 無人飛行体における地面効果を利用した表面検出 |
| US9934694B2 (en) | 2014-06-26 | 2018-04-03 | Amazon Technologies, Inc. | Ground effect based surface sensing using multiple propellers in automated aerial vehicles |
| JP2016043927A (ja) * | 2014-08-26 | 2016-04-04 | パロット | 投げスタートにおける回転翼の無人機を動的に制御する方法 |
| CN104330071A (zh) * | 2014-10-14 | 2015-02-04 | 南昌航空大学 | 一种控制小型无人直升机平稳起飞的预检测方法 |
| CN104330071B (zh) * | 2014-10-14 | 2016-09-14 | 南昌航空大学 | 一种控制小型无人直升机平稳起飞的预检测方法 |
| KR101872295B1 (ko) * | 2015-04-21 | 2018-06-29 | 순천대학교 산학협력단 | 소형 무인비행체의 비행 자세 안정화 시스템 |
| KR20160125589A (ko) * | 2015-04-21 | 2016-11-01 | 순천대학교 산학협력단 | 소형 무인비행체의 비행 자세 안정화 시스템 |
| US10817000B2 (en) | 2016-09-13 | 2020-10-27 | Fujitsu Limited | Unmanned aerial vehicle and control method of unmanned aerial vehicle |
| WO2019168079A1 (ja) * | 2018-02-28 | 2019-09-06 | 株式会社ナイルワークス | 安全性を向上した農業用ドローン |
| JPWO2019168079A1 (ja) * | 2018-02-28 | 2020-08-06 | 株式会社ナイルワークス | 安全性を向上した農業用ドローン |
| JP2020131779A (ja) * | 2019-02-14 | 2020-08-31 | 株式会社Ihi | 飛行体 |
| JP7196668B2 (ja) | 2019-02-14 | 2022-12-27 | 株式会社Ihi | 飛行体 |
| WO2021053929A1 (ja) * | 2019-09-17 | 2021-03-25 | ソニー株式会社 | 飛行体、制御方法及びプログラム |
| US20220289376A1 (en) * | 2019-09-17 | 2022-09-15 | Sony Group Corporation | Flying body, control method, and program |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1995174A2 (en) | 2008-11-26 |
| US20110057075A1 (en) | 2011-03-10 |
| US7871044B2 (en) | 2011-01-18 |
| US8141823B2 (en) | 2012-03-27 |
| EP1995174A3 (en) | 2013-04-24 |
| US20100012776A1 (en) | 2010-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008290704A (ja) | 傾斜表面上での垂直離陸及び着陸方法 | |
| US10474167B2 (en) | System, a method and a computer program product for maneuvering of an air vehicle with tiltable propulsion unit | |
| US9540100B2 (en) | System, a method and a computer program product for maneuvering of an air vehicle | |
| US6604706B1 (en) | Gyrostabilized self propelled aircraft | |
| NL2017971B1 (en) | Unmanned aerial vehicle | |
| US20180354623A1 (en) | Multi-rotor aerial vehicle with single arm failure redundancy | |
| US20170210468A1 (en) | Spherical vtol aerial vehicle | |
| JP2010241409A (ja) | 三軸磁力計の1軸を使用した無人航空機に対する補正行為の実行 | |
| JP2010168034A (ja) | ダクト付きファンuav制御の代替方法 | |
| US11479353B2 (en) | Distributed elevon systems for tailsitting biplane aircraft | |
| US11650604B2 (en) | Yaw control systems for tailsitting biplane aircraft | |
| CN115016514A (zh) | 仿生扑翼飞行器的起飞、巡航及降落全自主飞行控制方法 | |
| US11858626B2 (en) | Autonomous air vehicle delivery system incorporating deployment | |
| AU2020364319B2 (en) | Contingent use of commanded speed in lieu of sensed airspeed to inform flight control decisions | |
| JP2008201183A (ja) | 姿勢制御装置 | |
| JP3231301U (ja) | 無人航空機 | |
| JP2019064581A (ja) | 回転翼航空機 | |
| JP2019077207A (ja) | 回転翼航空機 | |
| US11479354B2 (en) | Thrust vectoring coaxial rotor systems for aircraft | |
| JP6561272B1 (ja) | 回転翼航空機 | |
| JP2019043394A (ja) | 回転翼航空機 | |
| NL1040979B1 (en) | Air vehicle. | |
| Pelletier et al. | Autonomous navigation and control functions of the CL-327 VTOL UAV |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110221 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20110912 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121126 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130225 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130228 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130325 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130328 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130426 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130502 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131129 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140430 |