JP2008242512A - 検知エリアの設定装置及び同設定方法 - Google Patents
検知エリアの設定装置及び同設定方法 Download PDFInfo
- Publication number
- JP2008242512A JP2008242512A JP2007077638A JP2007077638A JP2008242512A JP 2008242512 A JP2008242512 A JP 2008242512A JP 2007077638 A JP2007077638 A JP 2007077638A JP 2007077638 A JP2007077638 A JP 2007077638A JP 2008242512 A JP2008242512 A JP 2008242512A
- Authority
- JP
- Japan
- Prior art keywords
- detection area
- marker
- image
- detected
- setting device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 99
- 238000000034 method Methods 0.000 title abstract description 23
- 239000003550 marker Substances 0.000 claims abstract description 91
- 239000000126 substance Substances 0.000 claims description 13
- 238000000605 extraction Methods 0.000 claims description 2
- 238000012544 monitoring process Methods 0.000 abstract description 12
- 239000003086 colorant Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000002372 labelling Methods 0.000 description 2
- 241000872198 Serjania polyphylla Species 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
Images






Landscapes
- Image Processing (AREA)
Abstract
【解決手段】ドア入口に監視カメラ20を設置すると共に、床面上に設定する検知エリアの各頂点にマーカーを配置する。そのマーカーの互いに反対色に変えた撮像画像から、画像の各画素毎の輝度の差分値を求め、その差分値を閾値で2値化してマーカーを異物として抽出する。その撮像画像を処理して画像内のマーカーの座標を検出し、検出した座標に従って検知エリアを設定する。その場合、閾値を可変にすることで、ノイズを除去し、最適な閾値を設定して上記2値化を行うようにしている。また、マーカーが抽出できない場合は、マーカーが抽出できなかったか等の表示を行う。
【選択図】図1
Description
また、自動ドア用センサでは、検知エリアの設定(即ち、奥行き、幅)をディップスイッチや例えば、赤外線センサの設置角度を調整するレバーによる調整で行っている。
また、自動ドア用センサを用いた設定方式では、奥行き、幅をそれぞれ手動で設定しなければならないだけではなく、設定した検知エリアが意図した範囲になっているかどうかその都度確認する必要があるが、自動ドア用センサは、一般に比較的高い位置に設置するため、検知エリアの位置・角度の設定・修正を高いところで行い、床に下りて動作確認をする作業を繰り返して行わなければならない。そのため、自動ドア用センサの調整等に手間が掛かるという問題がある。
また、検出できなかったマーカーがあるときは、どのマーカーが検知できなかったかを通知して、検出可能なマーカーに代えることができるようにすることである。
請求項2の発明は、請求項1に記載された検知エリア設定装置において、さらに、撮像画像を設置するマーカーの数に応じて複数の分割エリアに分割する分割手段を有することを特徴とする。
請求項3の発明は、請求項2に記載された検知エリア設定装置において、前記抽出した異物から各分割エリア毎にマーカーを検出する手段は、抽出した異物の数を各分割エリア毎に計数する手段と、該計数手段の計数値に応じて前記閾値を変更する手段と、を有し、前記閾値を変更する手段は、当該分割エリアにただ一つの異物が検知される値に前記閾値を変更することを特徴とする。
請求項4の発明は、請求項2又は3に記載された検知エリア設定装置において、前記分割エリアで異物が検出されないとき、検出できなかったマーカーを通知する手段を有することを特徴とする。
請求項5の発明は、請求項2ないし4のいずれかに記載された検知エリア設定装置において、前記検知エリア設定手段は、ただ一つの異物が検出された分割エリアの当該異物の座標に基づき、異物が検出されない他の分割エリアの異物の座標を判定して検知エリアを設定することを特徴とする。
請求項6の発明は検知エリア設定システムであって、請求項1ないし5のいずれかに記載された検知エリア設定装置と、マーカーの撮像画像を取得するイメージセンサとからなることを特徴とする。
また、検出できなかったマーカーがあるときは、どのマーカーが検出できなかったかを通知することで、検出可能なマーカーに代えることができ、マーカーが検知できない場合でも検知エリアの設定作業のやり直しを迅速に行うことができる。
また、一部の分割エリアでマーカーが検出できなくとも、そのマーカー位置が他の検出されたマーカーの位置座標から判別できるときは、検出されたマーカーの座標を用いて目的とする検知エリアを設定することができる。
図1は、本検知エリア設定システムを概略的に説明するためのブロック図である。
図示のように、本検知エリア設定システム1は、本システム全体を制御するCPU10、RAM12及びROM14とを備えたコンピュータからなる検知エリア設定装置10と、この検知エリア設定装置10に接続された、例えば監視カメラからなるイメージセンサ20と、検知エリアの初期設定用のディップスイッチ22と、ドアの開閉駆動用コントローラに接続するドアコントローラインターフェース24と、表示用などのためのLED(発光ダイオード)26とから成っている。なお、28は電源である。
なお、ここでは、1例として、マーカーとして、例えばオセロのような両面が白と黒のように互いに反対色となる厚紙等を用意して四角形の各頂点に1個づつ配置して検知エリアを設定する場合を例に採って説明する。
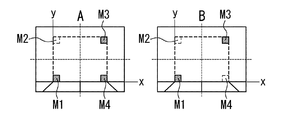
図3Aは、マーカーMを床面上においたときの画像であり、ここでは各マーカーMは4個で、四角な検知エリアの各頂点に配置されている。
図3Bは、最初においたマーカーMと反対色のマーカーMを床面上の同じ位置においた状態を示す。なお、床面の色と最初に配置したマーカーMの色の差が大きい場合(例えば黒のマーカーに対して床面が黒である場合など)は、反対色のマーカーMを置く代わりに床面画像自体を第2の画像とすることもできる。
図3Cは、画像を四分割して異物の抽出を行った画像の状態を示す。この場合は各分割エリア毎に異物が1つ抽出された理想的な状態を示している。
図3Dは、各分割エリアにおける異物の2次元座標から、4つの座標を結ぶ線を算出し、その線内の領域を検知エリアとして設定することを示している。
このように、一部の分割エリア内のマーカーが検出できない場合でも、他の検出されたマーカーの座標からその座標が判定できる場合は、その判定結果に基づいて検知区域を設定し、他の判定できたマーカーの座標のみからでは、検知区域の判定ができない場合に限って、マーカーの置き直しを行えばよい。
また、同様にカラー画像を用いることにより、RGBの階調度の各差分値を利用して、例えばR差分の大きいものは高さが○○cm、等というようにマーカーの色で検知エリアの高さを設定することもできる。
さらに、マーカーの大きさに、検知エリア設定上の意味を持たせることもできる。
以上の説明では、検知エリアを四角形のものとして説明したが、これに限定されず当然のことながら任意の多角形に設定できる。
ただ、以上のように画像分割を行う場合は、分割されたエリア毎に1つのマーカーが検出されることが条件となるから、分割エリアには必ず1つのマーカーを置くことが前提である。
また、設定したい検知エリアが、設定したいエリアの形になっていないと判別されたときにはエラー通知を行う。その場合のエラー通知は、LEDの組み合わせ等によりマーカーの位置を確認し調整し直す(つまり、検知出来るように色の変更等を行う)ことを促す表示となる。
このように、画面分割を行わずに検知エリアを設定する場合は、画面分割を行う方式におけるように決められた形にしか設定できないということがなく、検知エリアの設定の自由度が高いという利点がある。
別の方法として、マーカーの形状やサイズ等を予めメモリに登録しておくことで、撮像されたマーカーの形状やサイズ等から異物がマーカーらしいかどうか判別して、マーカーを検出することもできる。また、この方法では、マーカー以外のマーカーらしい異物(人物)が画像に含まれてしまうことがある場合に、上記輝度差分値による閾値の調整を組み合わせるとマーカー検出の精度を更に向上させることができる。
Claims (6)
- 異なるマーカーを同一の位置に配置した二枚の画像を差分処理する手段と、差分処理して得た差分値を閾値を基に二値化して各分割エリア毎に異物を抽出する手段と、抽出した異物から各分割エリア毎にマーカーを検出する手段と、検出したマーカーの座標に基づき、各マーカー座標を頂点として各頂点を結ぶ領域を検知エリアに設定する手段と、を有することを特徴とする検知エリア設定装置。
- 請求項1に記載された検知エリア設定装置において、
さらに、撮像画像を設置するマーカーの数に応じて複数の分割エリアに分割する分割手段を有することを特徴とする検知エリア設定装置。 - 請求項2に記載された検知エリア設定装置において、
前記抽出した異物から各分割エリア毎にマーカーを検出する手段は、抽出した異物の数を各分割エリア毎に計数する手段と、該計数手段の計数値に応じて前記閾値を変更する手段と、を有し、
前記閾値を変更する手段は、当該分割エリアにただ一つの異物が検知される値に前記閾値を変更することを特徴とする検知エリア設定装置。 - 請求項2又は3に記載された検知エリア設定装置において、
前記分割エリアで異物が検出されないとき、検出できなかったマーカーを通知する手段を有することを特徴とする検知エリア設定装置。 - 請求項2ないし4のいずれかに記載された検知エリア設定装置において、
前記検知エリア設定手段は、ただ一つの異物が検出された分割エリアの当該異物の座標に基づき、異物が検出されない他の分割エリアの異物の座標を判定して検知エリアを設定することを特徴とする検知エリア設定装置。 - 請求項1ないし5のいずれかに記載された検知エリア設定装置と、マーカーの撮像画像を取得するイメージセンサとからなる検知エリア設定システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007077638A JP4858846B2 (ja) | 2007-03-23 | 2007-03-23 | 検知エリア設定装置及び同設定システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007077638A JP4858846B2 (ja) | 2007-03-23 | 2007-03-23 | 検知エリア設定装置及び同設定システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008242512A true JP2008242512A (ja) | 2008-10-09 |
| JP4858846B2 JP4858846B2 (ja) | 2012-01-18 |
Family
ID=39913833
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007077638A Active JP4858846B2 (ja) | 2007-03-23 | 2007-03-23 | 検知エリア設定装置及び同設定システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4858846B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013114684A1 (ja) * | 2012-01-30 | 2013-08-08 | 株式会社東芝 | 画像センサシステム、情報処理装置、情報処理方法及びプログラム |
| US8682095B2 (en) | 2008-11-04 | 2014-03-25 | Electronics And Telecommunications Research Institute | Method for recognizing markers using dynamic threshold and learning system based on augmented reality using marker recognition |
| JP2017027146A (ja) * | 2015-07-16 | 2017-02-02 | トヨタ自動車株式会社 | 自律移動体の監視エリア設定方法及び自律移動体 |
| US9704040B2 (en) | 2014-03-19 | 2017-07-11 | Kabushiki Kaisha Toshiba | Image processing apparatus for dividing an image based on markers, method thereof and program therefor |
| JP2019156565A (ja) * | 2018-03-13 | 2019-09-19 | 新明和工業株式会社 | 塵芥収集車 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08335136A (ja) * | 1995-06-08 | 1996-12-17 | Canon Inc | 座標検出装置及び方法 |
| JP2001224856A (ja) * | 1999-12-06 | 2001-08-21 | Namco Ltd | ゲーム用の装置、位置検出用の装置及び情報記憶媒体 |
| JP2001325069A (ja) * | 2000-03-07 | 2001-11-22 | Nikon Gijutsu Kobo:Kk | 位置検出装置およびその方法 |
| JP2005293409A (ja) * | 2004-04-02 | 2005-10-20 | Fujitsu Ltd | 特定画像位置推定装置,特定画像位置推定方法,特定画像位置推定プログラム及び特定画像位置推定プログラムを記録したコンピュータ読取可能な記録媒体並びに媒体 |
-
2007
- 2007-03-23 JP JP2007077638A patent/JP4858846B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08335136A (ja) * | 1995-06-08 | 1996-12-17 | Canon Inc | 座標検出装置及び方法 |
| JP2001224856A (ja) * | 1999-12-06 | 2001-08-21 | Namco Ltd | ゲーム用の装置、位置検出用の装置及び情報記憶媒体 |
| JP2001325069A (ja) * | 2000-03-07 | 2001-11-22 | Nikon Gijutsu Kobo:Kk | 位置検出装置およびその方法 |
| JP2005293409A (ja) * | 2004-04-02 | 2005-10-20 | Fujitsu Ltd | 特定画像位置推定装置,特定画像位置推定方法,特定画像位置推定プログラム及び特定画像位置推定プログラムを記録したコンピュータ読取可能な記録媒体並びに媒体 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8682095B2 (en) | 2008-11-04 | 2014-03-25 | Electronics And Telecommunications Research Institute | Method for recognizing markers using dynamic threshold and learning system based on augmented reality using marker recognition |
| WO2013114684A1 (ja) * | 2012-01-30 | 2013-08-08 | 株式会社東芝 | 画像センサシステム、情報処理装置、情報処理方法及びプログラム |
| JP2013157810A (ja) * | 2012-01-30 | 2013-08-15 | Toshiba Corp | 画像センサシステム、情報処理装置、情報処理方法及びプログラム |
| US9704040B2 (en) | 2014-03-19 | 2017-07-11 | Kabushiki Kaisha Toshiba | Image processing apparatus for dividing an image based on markers, method thereof and program therefor |
| JP2017027146A (ja) * | 2015-07-16 | 2017-02-02 | トヨタ自動車株式会社 | 自律移動体の監視エリア設定方法及び自律移動体 |
| JP2019156565A (ja) * | 2018-03-13 | 2019-09-19 | 新明和工業株式会社 | 塵芥収集車 |
| JP7057169B2 (ja) | 2018-03-13 | 2022-04-19 | 新明和工業株式会社 | 塵芥収集車 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4858846B2 (ja) | 2012-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10854062B2 (en) | Fire monitoring system | |
| CN105453153B (zh) | 交通灯检测 | |
| US20130136307A1 (en) | Method for counting objects and apparatus using a plurality of sensors | |
| KR101998639B1 (ko) | 열화상 카메라와 색상 카메라의 복합 영상을 이용한 지능형 발화지점 감시 시스템 | |
| US20180336397A1 (en) | Method for detecting a live face for access to an electronic device | |
| EP2226764A1 (en) | Image analysis device, image analysis method, image sensing device, image analysis program, and storage medium | |
| JP4858846B2 (ja) | 検知エリア設定装置及び同設定システム | |
| KR101679205B1 (ko) | 디바이스 결함 검출장치 | |
| EP2161679B1 (en) | Apparatus and method for extracting object image | |
| US9286669B2 (en) | Image processing apparatus, image processing method and program | |
| US20090084855A1 (en) | Methods and Apparatus for Directing Bar Code Positioning for Imaging Scanning | |
| KR101549495B1 (ko) | 문자 추출 장치 및 그 방법 | |
| JP4242796B2 (ja) | 画像認識方法及び画像認識装置 | |
| EP2173087A1 (en) | Imaging device and method | |
| KR101044903B1 (ko) | 영상 감시 시스템에서 은닉 마르코프 모델을 이용한 불 검출방법 | |
| JP2020143802A (ja) | 情報処理装置、焼却制御装置、情報処理方法、および情報処理プログラム | |
| JP2017191544A (ja) | 火災検知装置及び火災検知方法 | |
| JP2010286995A (ja) | 車両用画像処理システム | |
| KR20150115469A (ko) | 케이블 하네스 자동 검사 방법 | |
| US11627246B2 (en) | Camera adjustment apparatus, camera position adjustment method, and computer readable medium | |
| JP2023025406A (ja) | 状態検出装置および状態検出方法 | |
| JP6560067B2 (ja) | 支援システム | |
| US10942607B2 (en) | Manipulation detection device and video display system that are capable detecting an object on a video display surface | |
| JP2008226176A (ja) | 熱目標追跡装置及び熱目標追跡方法 | |
| JPH07296166A (ja) | 混雑度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091228 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110610 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110614 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110809 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111007 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111020 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4858846 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141111 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |