JP2008237014A - モータ駆動方法、ディスクドライブ及びコンピュータで読み取り可能な記録媒体 - Google Patents
モータ駆動方法、ディスクドライブ及びコンピュータで読み取り可能な記録媒体 Download PDFInfo
- Publication number
- JP2008237014A JP2008237014A JP2008073906A JP2008073906A JP2008237014A JP 2008237014 A JP2008237014 A JP 2008237014A JP 2008073906 A JP2008073906 A JP 2008073906A JP 2008073906 A JP2008073906 A JP 2008073906A JP 2008237014 A JP2008237014 A JP 2008237014A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- drive
- driving
- pulse
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/20—Driving; Starting; Stopping; Control thereof
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/20—Driving; Starting; Stopping; Control thereof
- G11B19/28—Speed controlling, regulating, or indicating
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/02—Control of operating function, e.g. switching from recording to reproducing
Abstract
【解決手段】開ループ駆動モードでモータの予測速度の変化に基づいてモータに印加される駆動パルスの幅を変化させるステップを含むことを特徴とするモータ駆動方法が提供される。
【選択図】図4
Description
14 スピンドルモータ
16 変換器
20 スライダ
26 ボイスコイル
40 電気システム
42 コントローラ
44 リード/ライトチャンネル回路
46 プレアンプ
48 VCM駆動部
50 ROM
52 RAM
54 ホストインターフェース回路
56 スピンドルモータ駆動部
58 スピンドルモータ
59 センサー
Claims (44)
- 開ループ駆動モードでモータの予測速度の変化に基づいて前記モータに印加される駆動パルスの幅を変化させるステップを含むことを特徴とするモータ駆動方法。
- 前記モータに一定の幅を有する基準駆動パルスを印加するステップと、
印加された前記基準駆動パルスによってモータの速度を検出するステップと、
時間の経過に応じて前記検出された速度によって前記予測速度を設定するステップと、
をさらに含むことを特徴とする請求項1に記載のモータ駆動方法。 - メモリにルックアップテーブルで前記予測速度を保存するステップをさらに含み、
前記駆動パルスの幅を変更させるステップは、前記ルックアップテーブルによって駆動パルスの幅を変更させることを特徴とする請求項2に記載のモータ駆動方法。 - 前記モータの速度を検出するステップは、基準速度を検出して前記基準速度への到達にかかる基準時間を検出し、
前記駆動パルスの幅を変化させるステップは、前記駆動パルスによってモータの基準速度への到達時間が前記基準時間より短くなるように、前記モータに印加される可変な幅を有する駆動パルスを生成させることを特徴とする請求項3に記載のモータ駆動方法。 - 前記予測速度に基づいて前記駆動パルスが生成される間に駆動時間の長さを決定することを特徴とする請求項1に記載のモータ駆動方法。
- 前記予測速度に基づいて前記駆動パルスの可変幅に相応する単位駆動時間を決定することを特徴とする請求項1に記載のモータ駆動方法。
- 前記開ループ駆動モードは、前記モータが静止状態から回転状態に制御されるモードを含むことを特徴とする請求項1に記載のモータ駆動方法。
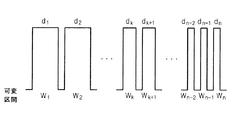
- 前記駆動パルスの幅は、時間の経過に応じて縮小されることを特徴とする請求項1に記載のモータ駆動方法。
- 前記モータの特性を検出するステップと、
前記検出されたモータの特性によって前記開ループ駆動モードの駆動条件を決定するステップと、
をさらに含むことを特徴とする請求項1に記載のモータ駆動方法。 - 前記モータの特性は、前記モータの負荷、速度、位置の内の少なくとも一つを含むことを特徴とする請求項9に記載のモータ駆動方法。
- 前記モータの予測速度変化は、前記モータの環境因子によって決定された予測速度の変化で表現されることを特徴とする請求項1に記載のモータ駆動方法。
- 前記モータの開ループ駆動モードが発生するか否かを判断するステップをさらに含み、
前記駆動パルスの幅は、前記判断するステップにおける判断結果によって変化させることを特徴とする請求項11に記載のモータ駆動方法。 - 前記モータから逆起電力を検出し、該検出された逆起電力が所定の基準臨界値より小さい場合に、前記開ループ駆動モードで駆動されることを特徴とする請求項11に記載のモータ駆動方法。
- 前記モータの開ループ駆動条件は、単位駆動パルスによる駆動及びロータ位置センシングを特定回数ほど反復して実行した後に、前記モータで検出される逆起電力の初期設定された臨界値を超える場合に、閉ループ駆動条件に変更されることを特徴とする請求項1に記載のモータ駆動方法。
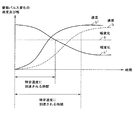
- 前記駆動パルスの幅は、モータ起動時間の経過によって予測されるモータの速度に反比例して変化させることを特徴とする請求項1に記載のモータ駆動方法。
- 前記駆動パルスの幅は、モータ起動時間の経過によって予測されるモータ回転負荷の大きさに比例して変化させることを特徴とする請求項1に記載のモータ駆動方法。
- 前記駆動パルスの幅は、前記モータ起動時間の経過によって前記モータの回転負荷を考慮して、最適化させた単位駆動時間の長さ情報が設定されたルックアップテーブルに設定された情報によって変化させることを特徴とする請求項1に記載のモータ駆動方法。
- 前記単位駆動時間の長さで前記駆動パルスの幅が決定され、前記単位駆動時間の長さは、前記モータの回転負荷の大きさに比例して設定されることを特徴とする請求項17に記載のモータ駆動方法。
- 前記駆動パルスの幅は、モータ予測速度軌跡に基づいて算出された最適の単位駆動時間の長さの軌跡を表現した関数によって決定されることを特徴とする請求項1に記載のモータ駆動方法。
- 前記開ループ駆動モードで前記駆動パルスによってモータを駆動させる駆動モードと、前記駆動モード実行後の前記モータの固定子に対する回転子の位置を検出するセンシングモードとを反復して実行することを特徴とする請求項1に記載のモータ駆動方法。
- 情報を保存するディスクと、
前記ディスクを回転させるモータと、
開ループ駆動モードで前記モータの予測速度変化によって前記モータに印加される駆動パルスの幅を変化させるコントローラと、を備えることを特徴とするディスクドライブ。 - 前記モータの予測速度変化を含むルックアップテーブルを保存するメモリをさらに備え、
前記予測速度変化は、時間の経過に応じてパルスの幅が変化することを表すことを特徴とする請求項21に記載のディスクドライブ。 - 前記予測速度変化は、前記コントローラで前記駆動パルスを生成させる単位駆動時間の長さで表現されることを特徴とする請求項23に記載のディスクドライブ。
- 前記予測速度変化は、前記駆動パルスによって前記モータの基準速度への到達時間で表し、前記時間は、一定の幅を有する基準駆動パルスによって前記モータの基準速度への到達時間より短いことを特徴とする請求項21に記載のディスクドライブ。
- 前記駆動パルスの幅は、時間の経過に応じて縮小することを特徴とする請求項21に記載のディスクドライブ。
- 前記モータの予測速度変化は、前記モータの環境因子によって決定された予測速度の変化で表現されることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、モータの開ループ駆動モードに進入したか否かを判断し、判断結果によって駆動パルスの幅を変化させることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、前記モータから逆起電力を検出し、該検出された逆起電力が所定の基準臨界値より小さい場合に、前記開ループ駆動モードで駆動されることを特徴とする請求項27に記載のディスクドライブ。
- 前記モータの開ループ駆動条件は、単位駆動パルスによる駆動及びロータ位置センシングを特定回数ほど反復して実行した後に、前記モータで検出される逆起電力の初期設定された臨界値を超える場合に、閉ループ駆動条件に変更されることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、モータ起動時間の経過によって予測される前記モータの速度に反比例して前記駆動パルスの幅を変化させることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、モータ起動時間の経過によって予測されるモータ回転負荷の大きさに比例して、前記駆動パルスの幅を変化させることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、前記モータ起動時間の経過によって前記モータの回転負荷を考慮して、最適化させた単位駆動時間の長さ情報が設定されたルックアップテーブルに設定された情報によって、前記駆動パルスの幅を変化させることを特徴とする請求項21に記載のディスクドライブ。
- 前記駆動パルスの幅は、前記単位駆動時間の長さによって決定され、前記単位駆動時間の長さは、前記モータの回転負荷の大きさに比例して設定されることを特徴とする請求項32に記載のディスクドライブ。
- 前記開ループ駆動モードで前記駆動パルスによってモータを駆動させる駆動モードと、前記駆動モード実行後の前記モータの固定子に対する回転子の位置を検出するセンシングモードとを反復して実行することを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、開ループ駆動モードが発生した場合に、モータの初期駆動時間区間によって変化する単位駆動時間の長さを有する駆動制御信号を生成させ、前記駆動制御信号によって生成される駆動パルスを前記モータに供給することを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、前記モータから検出された逆起電力が所定の基準臨界値より小さい場合に、前記開ループ駆動モードを実行させることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、単位駆動パルスによる駆動及びロータ位置センシングを特定回数ほど反復して実行した後に、前記モータで検出される逆起電力の初期設定された臨界値を超える場合に、前記開ループ駆動モードを閉ループ駆動モードに変更させることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、前記モータの起動時間区間によって予測された前記モータの速度に反比例して可変する単位駆動時間の長さを有する駆動制御信号を生成させることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、前記モータの起動時間区間によって予測された前記モータの回転負荷に比例して可変する単位駆動時間の長さを有する駆動制御信号を生成させることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、前記モータ起動時間の経過によって前記モータの回転負荷を考慮して、最適化させた単位駆動時間の長さ情報が設定されたルックアップテーブルに設定された情報によって前記駆動パルスの幅を変化させることを特徴とする請求項21に記載のディスクドライブ。
- 前記駆動パルスの幅は、単位駆動時間の長さによって決定され、前記単位駆動時間の長さは、前記モータの回転負荷の大きさに比例して設定されることを特徴とする請求項21に記載のディスクドライブ。
- 前記コントローラは、前記モータの予測速度軌跡に基づいて算出された最適の単位駆動時間の長さの軌跡を表現した関数によって前記駆動パルスの幅を決定することを特徴とする請求項41に記載のディスクドライブ。
- 前記コントローラは、前記開ループ駆動モードで前記駆動パルスによってモータを駆動させる駆動モードと、前記駆動モード実行後の前記モータの固定子に対する回転子の位置を検出するセンシングモードを反復して実行することを特徴とする請求項42に記載のディスクドライブ。
- 開ループ駆動モードでモータの予測速度変化に基づいて前記モータに印加される駆動パルスの幅を変化させるステップを含むモータ駆動方法を実行させるためのプログラムを記録したコンピュータで読み取り可能な記録媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020070027222A KR20080085541A (ko) | 2007-03-20 | 2007-03-20 | 스핀들 모터 개루프 구동 방법 및 이를 이용한 디스크드라이브 |
| US12/052,034 US20080231218A1 (en) | 2007-03-20 | 2008-03-20 | Apparatus and method of driving motor, and drive apparatus using the same |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008237014A true JP2008237014A (ja) | 2008-10-02 |
| JP2008237014A5 JP2008237014A5 (ja) | 2011-05-06 |
Family
ID=39774012
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008073906A Pending JP2008237014A (ja) | 2007-03-20 | 2008-03-21 | モータ駆動方法、ディスクドライブ及びコンピュータで読み取り可能な記録媒体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20080231218A1 (ja) |
| JP (1) | JP2008237014A (ja) |
| KR (1) | KR20080085541A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019241048A1 (en) * | 2018-06-15 | 2019-12-19 | Texas Instruments Incorporated | Operational mode control of a motor |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100712335B1 (ko) * | 2006-02-09 | 2007-05-02 | 주식회사 히타치엘지 데이터 스토리지 코리아 | 광디스크 장치 |
| US8077569B2 (en) * | 2008-05-05 | 2011-12-13 | Mediatek Inc. | Methods and devices for controlling access to an optical disc |
| US11764710B2 (en) | 2021-06-30 | 2023-09-19 | Texas Instruments Incorporated | Automatic transition of motor controller from open-loop control to closed-loop control |
| US11916496B2 (en) | 2021-06-30 | 2024-02-27 | Texas Instruments Incorporated | Motor controller and a method for controlling a motor |
| US11728751B2 (en) | 2021-08-31 | 2023-08-15 | Texas Instruments Incorporated | Resynchronization of brushless DC motors |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63290184A (ja) * | 1987-04-29 | 1988-11-28 | ゼネラル・エレクトリック・カンパニイ | ディジタル整流子、ディジタル制御装置、ディジタル整流方法及び相の切換えを制御する方法 |
| JPH0515197A (ja) * | 1991-07-02 | 1993-01-22 | Star Micronics Co Ltd | ステツピングモータの駆動制御方法 |
| US6339303B1 (en) * | 2000-03-31 | 2002-01-15 | International Business Machines Corporation | System, method, and program product for controlling communication of disk drive motor |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5841252A (en) * | 1995-03-31 | 1998-11-24 | Seagate Technology, Inc. | Detection of starting motor position in a brushless DC motor |
| US6594105B1 (en) * | 1999-04-21 | 2003-07-15 | Seagate Technology Llc | Time optimal seeks using linear velocity scheduling |
| US20020054451A1 (en) * | 2000-11-06 | 2002-05-09 | Moon Myung Soo | VCM head position detection and control with back EMF |
| US6710567B2 (en) * | 2000-11-27 | 2004-03-23 | Seagate Technology Llc | Velocity dependent reference profile for spindle motor acceleration control |
| US7002884B2 (en) * | 2002-12-30 | 2006-02-21 | Matsushita Electric Industrial Co., Ltd. | Intermediate power down mode for a rotatable media data storage device |
-
2007
- 2007-03-20 KR KR1020070027222A patent/KR20080085541A/ko active Search and Examination
-
2008
- 2008-03-20 US US12/052,034 patent/US20080231218A1/en not_active Abandoned
- 2008-03-21 JP JP2008073906A patent/JP2008237014A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63290184A (ja) * | 1987-04-29 | 1988-11-28 | ゼネラル・エレクトリック・カンパニイ | ディジタル整流子、ディジタル制御装置、ディジタル整流方法及び相の切換えを制御する方法 |
| JPH0515197A (ja) * | 1991-07-02 | 1993-01-22 | Star Micronics Co Ltd | ステツピングモータの駆動制御方法 |
| US6339303B1 (en) * | 2000-03-31 | 2002-01-15 | International Business Machines Corporation | System, method, and program product for controlling communication of disk drive motor |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019241048A1 (en) * | 2018-06-15 | 2019-12-19 | Texas Instruments Incorporated | Operational mode control of a motor |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20080085541A (ko) | 2008-09-24 |
| US20080231218A1 (en) | 2008-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7289288B1 (en) | Disk drive having hybrid spindle speed control and related method | |
| US8760796B1 (en) | Reducing acoustic noise in a disk drive when exiting idle mode | |
| JP2008237014A (ja) | モータ駆動方法、ディスクドライブ及びコンピュータで読み取り可能な記録媒体 | |
| KR100734293B1 (ko) | 하드디스크 드라이브의 보이스 코일 모터 구동 방법, 이에적합한 헤드 언로드 장치 및 기록 매체 | |
| JP2004030898A (ja) | 温度によるデータ記憶システム制御方法,温度によるデータ記憶システム制御装置,およびデータ記憶システムでのウォーミングライト電流決定方法 | |
| US20070008646A1 (en) | Seek control method of hard disk drive, recording medium storing method and hard disk drive adopting method | |
| US7567401B2 (en) | Method and apparatus for controlling motor rotation in hard disk drive | |
| US8766583B1 (en) | Voltage mode using pseudo current limit | |
| US7193799B2 (en) | Apparatus and method of removing resonance frequency in system | |
| JP4226998B2 (ja) | ディスク記憶装置 | |
| JP5015627B2 (ja) | ディスクドライブのトラックシークサーボを制御する方法、装置および記録媒体と、これを用いたディスクドライブ | |
| US7110205B2 (en) | Method for controlling start of adaptive spindle motor and disk drive using the method | |
| US7468590B1 (en) | Method and apparatus for initializing operation of a disk drive | |
| US7463445B2 (en) | Method of controlling track seek in HDD and a recording medium therefor | |
| JP4807498B2 (ja) | 多重サイン波形のシークサーボでのトルク定数の補正方法及びディスクドライブ | |
| JP2005204390A (ja) | データ記憶装置、モータ制御装置及びモータ制御方法 | |
| KR100518552B1 (ko) | 디스크 드라이브의 트랙 탐색 서보 제어 방법 및 장치 | |
| GB2381937A (en) | Write method for a storage system including a dummy write operation | |
| KR100640607B1 (ko) | 데이터 저장 시스템의 이상 상태 복원 제어 방법 및 이를이용한 디스크 드라이브 | |
| JP4163711B2 (ja) | ディスクドライブのトラック探索モードでの適応的載置制御方法及び装置 | |
| JP2002526877A (ja) | 磁束反転検出によるアクチュエータの範囲の拡張 | |
| KR100761856B1 (ko) | 시크 리트라이 조건에서의 서보 제어 방법 및 장치와 이를이용한 디스크 드라이브 | |
| KR100640647B1 (ko) | 위치별 특성을 고려한 트랙추종 제어방법 및 그 장치 | |
| US7593178B2 (en) | Method of reducing abrasion of disk by using dithering process and disk drive using the same | |
| JP2005218154A (ja) | 記憶装置の制御方法、モータ制御方法及び記憶装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110322 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110322 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20110322 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121113 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130820 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140204 |