JP2005218154A - 記憶装置の制御方法、モータ制御方法及び記憶装置 - Google Patents
記憶装置の制御方法、モータ制御方法及び記憶装置 Download PDFInfo
- Publication number
- JP2005218154A JP2005218154A JP2004017993A JP2004017993A JP2005218154A JP 2005218154 A JP2005218154 A JP 2005218154A JP 2004017993 A JP2004017993 A JP 2004017993A JP 2004017993 A JP2004017993 A JP 2004017993A JP 2005218154 A JP2005218154 A JP 2005218154A
- Authority
- JP
- Japan
- Prior art keywords
- waveform
- drive current
- drive
- motor
- timing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/20—Driving; Starting; Stopping; Control thereof
- G11B19/28—Speed controlling, regulating, or indicating
Abstract
【課題】
スピンドル・モータの駆動波形切り替えにおける、駆動電流の誤制御を防止する。
【解決手段】
駆動電流設定部425は、回転速度決定部から、実際の回転速度を取得する。駆動波形の変更がない場合、第1ゲインのフィードバック系により、駆動電流を決定する。駆動電流データに対応する駆動電流データをレジスタ401にセットする。次のタイミングにおいて駆動波形データが曲線波に切り替わった場合、フィードバック系処理を行わず、直前のタイミングにおける駆動電流データと同一の駆動電流データをレジスタ401にセットする。次にタイミングにおいて、回転速度決定部から、実際の回転速度を取得し、第2ゲインのフィードバック系により、駆動電流を決定する。駆動波形データが切り替わった場合、フィードバック系による処理を1回スキップするので、駆動波形切り替えにおける、駆動電流の誤制御を防止することができる。
【選択図】 図4
スピンドル・モータの駆動波形切り替えにおける、駆動電流の誤制御を防止する。
【解決手段】
駆動電流設定部425は、回転速度決定部から、実際の回転速度を取得する。駆動波形の変更がない場合、第1ゲインのフィードバック系により、駆動電流を決定する。駆動電流データに対応する駆動電流データをレジスタ401にセットする。次のタイミングにおいて駆動波形データが曲線波に切り替わった場合、フィードバック系処理を行わず、直前のタイミングにおける駆動電流データと同一の駆動電流データをレジスタ401にセットする。次にタイミングにおいて、回転速度決定部から、実際の回転速度を取得し、第2ゲインのフィードバック系により、駆動電流を決定する。駆動波形データが切り替わった場合、フィードバック系による処理を1回スキップするので、駆動波形切り替えにおける、駆動電流の誤制御を防止することができる。
【選択図】 図4
Description
本発明は記憶装置の制御方法、モータ制御方法及び記憶装置に関し、特に、駆動電流波形を変化させる、記憶装置の制御方法、モータ制御方法及び記憶装置に関する。
情報記録再生装置として、光ディスクや磁気テープなどの様々な態様のメディアを使用する装置が知られている。その中で、ハードディスク・ドライブは、コンピュータの記憶装置として広く普及し、現在のコンピュータ・システムにおいて欠かすことができない記憶装置の一つとなっている。さらに、コンピュータにとどまらず、動画像記憶再生装置、カーナビゲーション・システム、あるいはデジタル・カメラなどで使用されるリムーバブルメモリなど、ハードディスク・ドライブの用途は、その優れた特性により益々拡大している。
ハードディスク・ドライブは、データを記憶する磁気ディスクと、磁気ディスクを回転するスピンドル・モータ、磁気ディスクへ記憶されるデータの読み取り及び/もしくは書き込みを行う磁気ヘッド、磁気ヘッドが固定されたアクチュエータを備えている。アクチュエータはボイス・コイル・モータ(VCM)によって駆動され、ピボットを軸として揺動することによって磁気ヘッドを移動する。データの読み取り/書き込みのため、アクチュエータは回転している磁気ディスク表面のデータ領域上に磁気ヘッドを移動する。磁気ヘッドは、記録/再生薄膜素子とスライダとを有しており、磁気ディスクに対向するスライダのABS(Air Bearing Surface)面と回転している磁気ディスクとの間の空気の粘性による圧力が、アクチュエータによって磁気ディスク方向に加えられる圧力とバランスすることによって、磁気ヘッドは磁気ディスク上を一定のギャップをおいて浮上する。
スピンドル・モータは、CPUとスピンドル・モータ・ドライバ(SPMドライバ)によって駆動制御される。SPMドライバは、CPUからの命令に従って、スピンドル・モータの起動時及び回転時の制御を行う。スピンドル・モータの実際の回転速度を検出することによって、フェードバック制御によってスピンドル・モータの回転が制御される。ロード・アンロード方式のハードディスク・ドライブにおいて、磁気ヘッドは、データ書き込み/読み出し処理を行わない場合、磁気ディスクの外側に配置されたランプ機構に退避する。磁気ディスクの記憶領域へアクセスが必要な場合、アクチュエータが回動し、ランプから磁気ディスク上へ磁気ヘッドを移動する。磁気ヘッドが磁気ディスク上に移動することによって、磁気ヘッドと磁気ディスクとの間に空気摩擦が発生する。この空気摩擦は、磁気ディスクの回転変動を起こす要因となる。
このようなロードによる磁気ディスクの回転変動を抑制するための技術が、特許文献1に開示されている。ロード・アンロード式のディスクドライブにおいて、ヘッドのロード制御時に、スピンドル・モータのフィードバック制御システムの制御ゲインを高レベルに設定し、定常回転に到達してから当該制御ゲインを通常ゲインに戻す。CPUはヘッドのロード時に制御ゲインを高くして、外乱に対する応答性を向上させて回転変動を抑制する。回転変動が許容範囲内まで抑制されると、CPUはフィードバック制御システムの安定性を維持するため、制御ゲインを通常ゲインに戻す。
磁気ヘッドのロード時に制御ゲインを高くして、外乱に対する応答性を向上させて、回転変動を抑制する。また、制御ゲインが高くなると、フィードバック制御システムの安定性が劣化して発振現象を招く可能性があるため、回転変動が許容範囲内まで抑制されると、通常ゲインに戻す。このような構成であれば、データの記録再生時に、磁気ヘッドを磁気ディスク上にロードしたときに、磁気ヘッドと磁気ディスク間に発生する空気摩擦力に伴う外乱によるスピンドル・モータの回転変動を短時間で抑制することが可能となる。
一方、スピンドル・モータの駆動制御において、駆動電流の波形を変化させる技術が知られている。例えば、起動時には矩形波の駆動電流によってスピンドル・モータを駆動し、定常回転状態に移行した後に、駆動波形を矩形波から曲線状の波形(曲線波)に切替える。曲線波は高周波成分が少ないため、スピンドル・モータの回転による騒音を抑制することができる。駆動波形の切り替えは、一般に、ロード前の磁気ヘッドがランプ機構に退避しているタイミングで行われる。発明者らは、ロード・アンロード式におけるロード後のように、駆動波形の切り替えを、磁気ヘッドが磁気ディスク上に存在するタイミングで行う場合に、スピンドル・モータの駆動制御における問題があることを見出した。
スピンドル・モータの回転制御において、スピンドル・モータのコイルに誘起される逆気電圧を検出することによって、実際の回転速度を検出する。スピンドル・モータのフィードバック制御システムは、検出された回転速度が目標速度に一致するように、スピンドル・モータへ供給する駆動電流を制御する。駆動電流波形の変化は検出される逆起電圧を乱すため、駆動電流波形の切り替えのタイミングにおいては、スピンドル・モータの正確な回転速度を検出することができない場合がある。このため、ロード開始後に駆動電流波形を変化させる場合に、フィードバック制御システムが誤った回転速度を検出し、誤った駆動電流がスピンドル・モータに供給される。これによって、磁気ディスクの回転速度が大きく変動する。
本発明は上記事情を背景としてなされたものであって、本発明の目的はモータ制御において、効果的な駆動波形変化を可能とすることである。
本発明の第1の態様は、記憶ディスクと、前記記憶ディスクを回転するモータと、前記記憶ディスクの記憶領域へアクセスするヘッドとを有する記憶装置の制御方法であって、(a)前記モータの回転速度検出のための信号を取得するステップと、(b)前記取得された信号に基づいて前記モータの回転速度を決定するステップと、(c)前記決定された回転速度と目標速度とを比較して、所定タイミングに従って前記モータに供給する駆動電流を決定するステップと、(d)前記モータに供給する駆動電流の波形を変化するステップと、(e)前記波形変化後の最初のタイミングにおいて、前記波形変化後の前記回転速度検出のための信号とは独立に、前記モータに供給する駆動電流を決定するステップとを有する。波形変化後の駆動電流決定処理が回転速度検出のための信号とは独立に行われるので、信号波形の乱れによる誤った駆動電流の決定を防止することができる。
前記ステップ(e)において決定される駆動電流は、前記波形変化後の最初のタイミングの直前のタイミングに決定された駆動電流と同じであることが好ましい。あるいは、前記ステップ(d)において、前記ヘッドが回転する前記記憶ディスク上に在るタイミングにおいて、前記モータに供給する駆動電流の波形を変化することが好ましい。さらに、前記記憶ディスクからサーボ・データを取得するステップをさらに備え、前記ステップ(d)において、前記サーボ・データに基づき決定されたタイミングにおいて、前記駆動電流の波形が変化することが好ましい。さらに、前記ステップ(d)において、予め定められた連続回数サーボ・データが取得されたタイミングにおいて、前記駆動電流の波形が変化することが好ましい。
前記ステップ(d)の前に、前記磁気ディスクの外から回転する前記磁気ディスク上に、前記ヘッドを移動するステップをさらに備え、前記ステップ(d)において、前記ヘッドが回転する前記記憶ディスク上に在るタイミングにおいて、前記モータに供給する駆動電流の波形を変化することが好ましい。さらに、前記ステップ(d)において、前記駆動電流の波形は、第1の波形から第2の波形に変化し、前記第1の波形の最大電流値は前記第2の波形の最大電流値よりも小さいことが好ましい。あるいは、前記ステップ(e)の後に、前記ステップ(a)から(c)を繰り返すステップをさらに備え、前記ステップ(e)の前の前記ステップ(c)において、第1のゲインのフィードバック処理によって駆動電流が決定され、前記ステップ(e)の後の前記ステップ(c)において、前記第1のゲインよりも小さい第2のゲインのフィードバック処理によって駆動電流が決定されることが好ましい。
前記ステップ(d)において、前記駆動電流の波形は、第1の波形から第2の波形に変化し、前記第2の波形のスルーレートは前記第1の波形のスルーレートよりも小さいことが好ましい。
本発明の第2の態様のモータの制御方法は、(a)モータから、前記モータの回転速度検出のための信号を取得するステップと、(b)前記取得された信号に基づいて前記モータの回転速度を決定するステップと、(c)前記決定された回転速度と目標速度との差分に基づき、前記モータに供給する駆動電流を決定するステップと、(d)前記決定された駆動電流を前記モータに供給するステップと、(e)前記モータに供給する駆動電流の波形を変化するステップと、(f)前記波形変化後の最初のタイミングにおいて、前記波形変化後の前記回転速度検出のための信号とは独立に、前記モータに供給する駆動電流を決定するステップと、(g)前記波形変化後に決定された駆動電流を前記モータに供給するステップと、を有する。波形変化後の駆動電流決定処理が回転速度検出のための信号とは独立に行われるので、信号波形の乱れによる誤った駆動電流の決定を防止することができる。
前記ステップ(f)において決定される駆動電流は、前記波形変化後の最初のタイミングの直前のタイミングに決定された駆動電流と同じであることが好ましい。あるいは、前記回転速度検出のための信号は、前記モータのコイルに誘起される誘起電圧を検出することによって生成されることが好ましい。
本発明の第3の態様は、記憶ディスクと、前記記憶ディスクを回転するモータと、前記モータを制御するモータ制御部とを有する記憶装置であって、前記モータ制御部は、前記モータの回転に応じて生成される信号を、前記モータから取得する信号取得部と、前記取得された信号に基づいて前記モータの回転速度を決定する回転速度決定部と、前記モータに供給する駆動電流の波形を決定する波形決定部と、前記回転速度決定部が決定した回転速度と予め決定されている回転速度に基づき、所定タイミングに従って前記モータに供給する駆動電流値を決定し、前記駆動電流の波形が変化した後の最初のタイミングにおいて、前記駆動波形変化後の前記信号とは独立に前記駆動電流値を決定する、駆動電流決定部と、前記駆動電流決定部によって決定された駆動電流値と、前記波形決定部によって決定された駆動波形に応じた駆動電流を、前記モータに供給する駆動部と、を有する。波形変化後の駆動電流決定処理が回転速度検出のための信号とは独立に行われるので、信号波形の乱れによる誤った駆動電流の決定を防止することができる。
前記ディスクの記憶領域へアクセスするヘッドをさらに備え、前記ヘッドが前記ディスク上に在るタイミングにおいて、前記駆動波形が変化することが好ましい。さらに、前記記憶ディスクからサーボ・データを取得するサーボ・データ取得部をさらに備え、前記駆動波形決定部は、取得された前記サーボ・データに基づき決定されたタイミングにおいて、第1の駆動波形から第2の駆動波形に変化させることが好ましい。
前記ディスクの記憶領域へアクセスするヘッドと、前記ヘッドを移動する移動機構とをさらに備え、前記移動機構が、前記ディスクの外から回転する前記ディスク上に前記ヘッドを移動し、前記ヘッドが前記ディスク上に在るタイミングにおいて、前記駆動波形決定部は、第1の駆動波形から第2の駆動波形に変化するように前記駆動波形を決定し、前記第1の駆動波形の最大電流値は、前記第2の駆動波形の最大電流値よりも小さいことが好ましい。
前記ディスクの記憶領域へアクセスするヘッドと、前記ヘッドを移動する移動機構とをさらに備え、前記移動機構が、前記ディスクの外から回転する前記ディスク上に前記ヘッドを移動し、前記ヘッドが前記ディスク上に在るタイミングにおいて、前記駆動波形決定部は、第1の駆動波形から第2の駆動波形に変化するように前記駆動波形を決定し、前記駆動電流決定部は、前記回転速度決定部が決定した回転速度が前記予め決定されている回転速度に近づくように、フィードバック系によって前記駆動電流値を決定し、前記第1の駆動波形に対する前記フィードバック系のゲインは、前記第2の駆動波形に対する前記フィードバック系のゲインよりも大きいことが好ましい。
前記駆動電流決定部が前記駆動電流の波形が変化した後の最初のタイミングにおいて決定する駆動電流値は、直前のタイミングで決定された駆動電流値と同一の値である、ことが好ましい。
本発明によれば、モータ制御において、効果的な駆動波形変化が可能となる。
以下に、本発明を適用可能な実施の形態が説明される。以下の説明は、本発明の実施形態を説明するものであり、本発明が以下の実施形態に限定されるものではない。説明の明確化のため、以下の記載及び図面は、適宜、省略及び簡略化がなされている。又、当業者であれば、以下の実施形態の各要素を、本発明の範囲において容易に変更、追加、変換することが可能である。尚、各図面において、同一要素には同一の符号が付されており、説明の明確化のため、必要に応じて重複説明は省略されている。
図1は、本実施形態におけるデータ処理システム100の概略構成を示す構成図である。データ処理システム100は、コンピュータやデジタル・カメラなど、データ処理を行うホスト110と、ホスト110から伝送されたデータを記憶するデータ記憶装置であるハードディスク・ドライブ120を有している。ハードディスク・ドライブ120は、筺体内に、1もしくは複数の磁気ディスク121と、各磁気ディスクの記録面に対応する磁気ヘッド122を備えたヘッド・スタック・アセンブリ123を備えている。
磁気ヘッド122は、磁気ディスク121への記憶データに応じて電気信号を磁界に変換する記録素子、及び、磁気ディスク121からの磁界を電気信号に変換する再生素子を有している。さらに、磁気ヘッド122は、記録素子及び再生素子がその面上に形成されているスライダを有している。ヘッド・スタック・アセンブリ123は、例示的に4つの磁気ヘッド122を有しているが、1もしくは4以外の複数の磁気ヘッドを有することができる。また、ハードディスク・ドライブ120は、磁気ディスク121へのデータの書き込み及び磁気ディスク121からのデータ読み出しのために、これらの要素を制御するコントローラ124を備えている。
ホスト110から伝送されたホスト・ユーザ・データは、コントローラ124によって必要な処理がなされ、ライト信号に変換されたあと、ヘッド・スタック・アセンブリ123に送られる。磁気ヘッド122は、取得したライト信号に応じて、磁気ディスク121の記録面にデータを書き込む。一方、磁気ヘッド122によって磁気ディスクから読み出されたリード信号は、コントローラ124によってデジタル信号に変換され、必要な処理がなされたあと、ホスト110に伝送される。
磁気ディスク121は、磁性層が磁化されることによってデータを記録する不揮発性の記録媒体であり、ハードディスク・ドライブ120が動作しているときに、スピンドル・モータ125のスピンドル軸を中心として所定の速度で回転駆動される。ハードディスク・ドライブ120の非動作時には、磁気ディスク121は静止している。磁気ディスク121の表面には、データを格納するための区画として同心円状に複数のトラックが形成され、さらに、各トラックは円周方向に区分された複数のセクタを備えている。
磁気ディスク121の表面にはサーボ・データ記憶領域が形成されており、典型的には、磁気ディスク121は半径方向に沿って形成された複数のサーボ・データ記憶領域を有している。また、各セクタにおいてサーボ・データ記憶領域とユーザ・データ記憶領域とが形成されている。サーボ・データを磁気ヘッド122が読み取ることによって、磁気ヘッド122の位置に関する情報を取得することができる。サーボ・データは、トラック番号情報を備えるトラック・データ、セクタ番号情報を備えるセクタ・データ、及びバースト・パターンを有している。
ヘッド・スタック・アセンブリ123は、磁気ディスク121の表面に沿って揺動可能にフレーム内に取り付けられており、ボイス・コイル・モータ(VCM)126によって駆動される。ヘッド・スタック・アセンブリ123の先端部にはスライダと磁性薄膜素子とを有する磁気ヘッド122が設けられている。ヘッド・スタック・アセンブリ123が揺動することによって、磁気ヘッド122が磁気ディスク121の表面の半径方向に沿って移動する。これによって、磁気ヘッド122が所望のトラックにアクセスすることができる。
図1の例において、ヘッド・スタック・アセンブリ123は、一つの磁気ディスク121に対して2つの磁気ヘッド122を有しており、磁気ヘッドそれぞれが磁気ディスク121の各表裏面に対応する。磁気ヘッド122は、磁気ディスク121へのデータの書き込み、あるいは、磁気ディスク121からのサーボ・データ及びユーザ・データの読み出しを行う。ロード・アンロード方式において、磁気ヘッド122は、データ書き込み/読み出し処理を行わない場合、磁気ディスク121の外側に配置されたランプ機構(不図示)に退避する。磁気ディスク121の記憶領域へアクセスが必要な場合、ヘッド・スタック・アセンブリ123が回動し、磁気ディスク121上へ磁気ヘッド122を移動する。この点については、後にモータ制御との関連で説明される。以下においては、ロード・アンロード方式のハードディスク・ドライブ120について説明されるが、本発明のモータ制御を、CSS(Contact Start and Stop)方式に適用することも可能である。CSS方式においては、内周に配置されているCSSゾーンに退避する。
図1に示すように、コントローラ124は、リード/ライト・チャネル127、ハードディスク・コントローラ(HDC)128、マイクロプロセッサ・ユニット(MPU)129、メモリ130、サーボ・コントローラ133、モータ・ドライバ・ユニット134を有している。モータ・ドライバ・ユニット134は、ボイス・コイル・モータ・ドライバ(VCMドライバ)135及びスピンドル・モータ・ドライバ(SPMドライバ)136を有している。
リード/ライト・チャネル127は、ホスト110から取得したデータについて、ライト処理を実行する。ライト処理において、リード/ライト・チャネルはハードディスク・コントローラ128から供給された書き込みデータをコード変調し、さらにコード変調された書き込みデータをライト信号(電流)に変換して磁気ヘッド122に供給する。磁気ヘッド122は、取得した信号に応じてコイルに電流を流すことによって磁気ディスク121にデータを書き込む。また、ホスト110にデータを供給する際にはリード処理を行う。リード処理において、リード/ライト・チャネル127は磁気ヘッド122から供給されたリード信号からデータを抽出し、デコード処理を行う。デコード処理された読み出しデータは、ハードディスク・コントローラ128に供給される。
MPU129は、メモリ130にロードされたマイクロコードに従って動作し、磁気ヘッド122のポジショニング制御、インターフェース制御、ディフェクト管理などのハードディスク・ドライブ120の全体の制御のほか、データ処理に関する必要な処理を実行する。ハードディスク・ドライブ120の起動に伴い、メモリ130には、MPU129上で動作するマイクロコードの他、制御及びデータ処理に必要とされるデータが磁気ディスク121あるいはROM(不図示)からロードされる。
リード/ライト・チャネル127によって読み出されるデジタル・データは、ホスト110からのユーザ・データの他に、サーボ・データを含んでいる。サーボ・コントローラ133はリード/ライト・チャネル127から取得した読み出しデータからサーボ・データを抽出する。サーボ・コントローラ133はサーボ・データを得ることができると、セクタ毎にセクタ・パルスを出力する。また、抽出されるサーボ・データは、トラック・データ、セクタ・データ、及びバースト・パターンを有している。セクタ・パルス及び抽出されたサーボ・データは、サーボ・コントローラ133からMPU129に転送される。MPU129は、マイクロコードに従って、サーボ・データを使用した磁気ヘッド122の位置決め制御処理を行う。MPU129からのVCM制御データはモータ・ドライバ・ユニット134のレジスタにセットされる。VCMドライバ134はセットされたVCM制御データに応じて、駆動電流をVCM126に供給し、ヘッド・スタック・アセンブリ123を回動駆動する。
MPU129は、マイクロコードに従って、スピンドル・モータ125の回転制御のために、モータ・ドライバ・ユニット134のレジスタにSPM制御データをセットする。SPMドライバ136は、セットされたSPM制御データに応じて、スピンドル・モータ125の回転制御を実行する。SPMドライバ136は、スピンドル・モータ125を好適な状態で回転するために、所定波形の駆動電流をスピンドル・モータ125に供給する。また、最適な回転制御を行うために、ロータの位置検出あるいは回転速度検出を行う。SPMドライバ136によるスピンドル・モータ125の制御については、後に詳述される。
ハードディスク・コントローラ128は、ホスト110との間のインターフェース機能を備えており、ホスト110から伝送されたユーザ・データ及びリード・コマンドやライト・コマンドといったコマンドなどを受信する。受信したユーザ・データは、リード/ライト・チャネル127に転送される。また、リード/ライト・チャネル127から取得した磁気ディスクからの読み出しデータを、ホスト110に伝送する。ハードディスク・コントローラ128は、さらに、ホスト110から取得したユーザ・データについて、誤り訂正(ECC)のための符号生成処理を実行する。また、磁気ディスク121から読み出した読み出しデータについて誤り訂正処理を実行する。
本形態のハードディスク・ドライブ120における、スピンドル・モータ125の制御について説明する。スピンドル・モータ125の制御は、MPU129上で実行されるマイクロコードの指示に応じて、SPMドライバ136が行う。典型的には、スピンドル・モータ125として、3相センサレスDCモータが使用される。スピンドル・モータ125の制御としては、静止しているスピンドル・モータ125を起動するための起動制御、あるいは、起動後のスピンドル・モータ125の回転制御がある。以下において、起動後のスピンドル・モータ125の回転制御について詳細に説明される。本形態のスピンドル・モータ125制御は、スピンドル・モータ125に供給する駆動電流波形を変化させる。また、駆動電流波形を変化させるタイミングにおいて、スピンドル・モータ125制御のためのフィードバック処理における移行処理を実行する。移行処理については後に詳述される。
スピンドル・モータ125の駆動電流波形について説明する。上記のように、駆動電流はSPMドライバ136からスピンドル・モータ125に供給される。図2は、本形態のスピンドル・モータ125駆動制御において使用される2つ駆動電流波形を模式的に示している。図2は、例えば、3相センサレスDCモータの一つのコイルに供給される駆動電流の時間変化を示している。本形態のスピンドル・モータ125駆動制御においては、好ましい波形として、矩形波210と曲線波220が選択的に使用される。図2においては、説明のため両波形が重ねて描画されている。曲線波220は、好ましくは単一周波数のサイン波を基に形成されている。
スピンドル・モータ125の起動時(回転開始時)においては、回転速度を定常状態にすばやく上げるため、矩形波210によってスピンドル・モータ125が駆動される。その後、所定タイミングで駆動電流波形が、矩形波210から曲線波220に切替えられる。スピンドル・モータ125の静音化(低騒音化)の観点からは、曲線波220によってスピンドル・モータ125を駆動することが好ましい。曲線波220は、矩形波210と比較して、異なる周波数成分、特に高周波成分が少ないため、スピンドル・モータ125の回転による高周波音を抑制することができる。尚、駆動電流波形は図2の波形に限定されるものではない。例えば、矩形波210よりスルーレートの小さい直線状波形(台形波形やのこぎり波など)や曲線波220と異なる形状の曲線波を利用することができる。消音化の観点からは、よりスルーレートの小さい波形が利用される。図2において、曲線波のスルーレートは、矩形波のスルーレートよりも小さい。
本形態においては、磁気ヘッド122の位置に応じて、駆動電流波形が切替えられる。特に、本形態においては、磁気ヘッド122が回転する磁気ディスク上に在るタイミングで、矩形波210から曲線波220に駆動電流波形が切替えられる。図3は、磁気ヘッド122の位置と駆動電流波形切り替えタイミングの関係を説明する図である。図3において、310は非アクセス時に磁気ヘッド122を退避させるランプ、320は磁気ヘッド122が固定されるアクチュエータ先端部のタブである。アクチュエータはVCM126によって駆動され、ピボットを軸として揺動することによって磁気ヘッド122を移動する。
データの読み取り/書き込みのため、アクチュエータは回転している磁気ディスク表面のデータ領域上に磁気ヘッドを移動する(ロード処理)。ロードのときには、図3に示すように、パーキング面313に保持されていたタブ320は、斜面312をロード方向に摺動しながら上りさらに、斜面312をロード方向に摺動しながら下り、ランプ310から離脱して磁気ディスク121表面上空に移動する。一方、ディスクの回転が停止するときには、アクチュエータがランプ310の方向に回動し、ランプ310上に載ることにより、磁気ヘッド122がアンロードされる。また、アンロードにおいて、タブ320はランプ表面をアンロード方向に摺動しながらランプの斜面311を上り、斜面312を下って平坦なパーキング面313に至る。
駆動電流波形は、磁気ヘッド122が回転する磁気ディスク上に在る間の所定タイミングにおいて切り替えされ、好ましくは、ロード処理が完了したタイミングで切替えられる。磁気ヘッド122が磁気ディスク121上にロードされた後に、磁気ディスク121が所定回転数で定常回転する条件において、ロード処理は完了する。好ましい一例として、磁気ディスク121上のサーボ・データを所定回数(例えば5回など)読み取れたタイミングにおいて、駆動電流波形が切替えられる。
磁気ヘッド122が回転する磁気ディスク121上に移動すると、磁気ヘッド122と磁気ディスク121との間において空気摩擦が発生する。摩擦力はスピンドル・モータ125への外乱として作用し、スピンドル・モータ125の負荷が増加する。このままでは磁気ディスク121の回転数が大きく低下する。スピンドル・モータ125の回転数の変動を抑制するため、スピンドル・モータ125の駆動電流は、フィードバック系によって制御される。フィードバック制御については後に詳述されるが、磁気ディスク121の回転数と基準値との差分に応じて、駆動電流が供給される。
磁気ヘッド122のロード時において、空気摩擦に抗するために駆動電流(I)を増加することが必要となる。駆動電流の最大値は、基本的には、電源電圧(Vp)、スピンドル・モータ125の逆起電圧(Vb)、スピンドル・モータ125の抵抗値(Rm)及びSPMドライバ136の出力抵抗値(Rd)によって規定される。駆動電流(I)と(Rm+Rd)の積が、電源電圧と逆起電圧の差分(Vp−Vb)よりも小さい値であることが必要である。図2に示すように、矩形波210の駆動電流の最大値は、曲線波220よりも小さい。このため、駆動電流の大きな上昇に対して、矩形波210は曲線波220よりも大きなマージンを有している。
本形態においては、ロード時においては、矩形波210の駆動電流によってスピンドル・モータ125が駆動される。より大きな電流変動に対応できる矩形波210で駆動することによって、スピンドル・モータ125の負荷が急激に変化するロード時において効果的な回転制御を行うことができる。特に、より大きな電圧マージンを確保することができるため、様々な特性のSPMドライバを利用することが可能となり、特に出力抵抗値の大きいSPMドライバを使用する場合に有用である。また、より大きな電圧マージンを確保することができることは、磁気ディスク枚数が多く、逆起電圧が大きなハードディスク・ドライブにおいて特に有用である。ロード処理が完了し、スピンドル・モータ125が定常回転している状態において、駆動波形が矩形波210から曲線波220に切替えられる。これによって、回転制御を効果的に行い、低騒音化に寄与することができる。
図4は、本実施形態における、スピンドル・モータ125を制御するための論理構成を示すブロック図である。スピンドル・モータ125の制御は、MPU129上で実行されるマイクロコードの指示に応じて、SPMドライバ136が行う。スピンドル・モータ125の制御は、MPU129とSPMドライバ136との協働により行われ、MPU129とSPMドライバ136がモータ制御部として機能する。以下においては、起動後のスピンドル・モータ125の回転制御が説明される。
図4を参照して、モータ・ドライバ・ユニット134は、SPMドライバ136の他に、MPU129からの制御データを記憶するレジスタ401を有している。SPMドライバ136は、回転速度検出部410、駆動部411及び制御部412を有している。マイクロコードがMPU129上で実行されることによって、MPU129は様々な機能を実現する。図4に示すように、MPU129は、入力された信号を分周する分周部421、時間を測定するタイマ422、回転速度決定部423、駆動電流設定部425、駆動波形設定部424、そして、制御部426として機能する。
各構成について説明する。レジスタ401は、MPU129からの制御データを記憶する。本形態において、レジスタ401は、駆動電流値を特定する駆動電流データと、駆動電流波形を特定する駆動波形データを記憶する。駆動部411は、制御部412からの制御下において、スピンドル・モータ125に所定の駆動電流を供給する。駆動部411は、駆動電流データに従った電流値、駆動波形データに従った波形の駆動電流を供給する。回転速度検出部410は、スピンドル・モータ125の回転に応じてステータ・コイルに誘起される逆起電圧を検出し、スピンドル・モータ125の回転数を検出する。回転速度検出部410からの出力は、制御部412を介して、フェーズ信号としてMPU129に出力される。フェーズ信号はスピンドル・モータ125の実際の回転に応じたタイミングで生成され、本例においては、磁気ディスク121の1周あたり6周期のフェーズ信号が出力される。
分周部421は、SPMドライバ136から入力されたフェーズ信号を分周し、磁気ディスク121の1回転に相当する信号を生成する。本例においては、分周部421はフェーズ信号を1/6分周する。回転速度決定部423は、SPMドライバ136からの信号に基づいて、スピンドル・モータ125の実際の回転速度を決定する。本例においては、回転速度決定部423は、タイマ422からの信号と分周部421からの信号からスピンドル・モータ125の実際の回転速度を決定する。分周部421からの信号周期は、磁気ディスク121の1回転の時間に対応するため、タイマ422によって測定された時間と分周部421からの信号周期を比較することによって、回転速度決定部423は、スピンドル・モータ125の実際の回転速度を決定することができる。
駆動波形設定部424は、SPMドライバ136がスピンドル・モータ125に供給する駆動電流の駆動波形を設定する。具体的には、駆動波形設定部424は、駆動電流波形を特定する駆動波形データを、モータ・ドライブ・ユニット134のレジスタ401にセットする。本形態において、上記のように、駆動波形設定部424は駆動波形として、矩形波210と曲線波220の2つの駆動波形を切替えて設定する。駆動波形設定部424、まず矩形波210をセットし、その後曲線波220に切替える。駆動波形の設定は磁気ヘッド122の位置に基づいて行われる。磁気ヘッド122がロードされ、磁気ディスク121上に在るタイミングで駆動波形データが設定される。特に、磁気ディスク121が定常回転を行い、ロード処理が完了したタイミングで駆動波形が切り替えられる。
駆動波形設定部424には、サーボ・コントローラ133からのセクタ・パルスが入力される。サーボ・コントローラ133は、サーボ・データを検出すると、各セクタのサーボ・データに対応したセクタ・パルスを生成する。駆動波形設定部424は、セクタ・パルスに基づいてロードが完了したことを決定し、矩形波210から曲線波220に設定駆動波形を切り替える。本例においては、駆動波形設定部424は、予め定められた連続回数(例えば5回)のセクタ・パルスを取得すると、駆動波形設定部424はロードが完了したと決定する。
駆動電流設定部425は、SPMドライバ136がスピンドル・モータ125に供給する電流を設定する。具体的には、駆動電流値を特定する駆動電流データを、モータ・ドライブ・ユニット134のレジスタ401にセットする。駆動電流設定部425は、フィードバック系を構成し、回転速度決定部423によって決定された実際の回転速度と、予め記憶されている目標速度とを比較し、比較結果に基づいて駆動電流値を決定する。駆動電流値は、実際の回転速度が目標速度に近づくようにフィードバック系によって決定される。駆動電流設定部425は、磁気ディスク121の回転と同期して駆動電流データを設定し、回転速度決定部423と同様に、磁気ディスク121の1回転毎にレジスタ401に駆動電流データをセットする。
また、駆動電流設定部425は、駆動電流の駆動波形に基づいて駆動電流の決定処理を制御する。駆動電流設定部425には、駆動波形設定部424から、駆動波形を特定するデータが渡される。駆動電流設定部425はこのデータによって駆動波形の切り替えを検知し、駆動電流の設定処理を制御する。駆動電流設定部425による駆動電流の設定のための内部処理については後に詳述される。
図4に示された論理構成の全体的動作について、図5を参照して説明する。SPMドライバ136による起動処理が完了したあと、回転速度検出部410は、スピンドル・モータ125の逆起電圧の変動を検出することによって実質的な回転速度を検出する(S501)。起動処理完了時において、駆動部411は、矩形波の駆動電流によってスピンドル・モータ125を回転駆動している。また、磁気ヘッド122はランプ上に退避している。制御部412は、回転速度検出部410からの出力に応じて、フェーズ信号を生成し、MPU129に送信する(S502)。
分周部421は、フェーズ信号を取得し、それを1/6分周する(S503)。分周された信号の周期とタイマ422の計測時間を比較して、回転速度決定部423がスピンドル・モータの実際の回転速度を算出する(S504)。駆動電流設定部425は、回転速度決定部423から実際の回転速度を取得し、目標回転速度と比較することによって、駆動電流を決定する。さらに、駆動電流データをレジスタ401にセットする(S505)。駆動部411は、制御部412の制御下において、レジスタにセットされた駆動電流データに応じて駆動電流の電流値を制御する(S506)。
磁気ヘッド122がランプから磁気ディスク121上にロードされ、サーボ・コントローラ133がサーボ・データを取得すると、セクタ・パルスがMPU129に入力される。駆動波形設定部424は、セクタ・パルスが連続して所定回数入力されたことに応答して、駆動波形を矩形波から曲線波に変更することを決定する(S507)。駆動波形設定部424は、レジスタ401に曲線波を示す駆動波形データをセットする(S508)。また、駆動波形の切り替えが、駆動電流設定部425に知らされる。
駆動電流設定部425は駆動波形の切り替えに対応するため、駆動電流の設定処理を変更し、駆動電流データをレジスタ401にセットする(S509)。具体的には、フィードバック系のゲインが駆動波形の切り替えに対応して変更される。また、駆動波形の切り替え時において、レジスタ401への駆動電流データのセットが、通常動作とは異なる方法によって行われる(移行処理)。これらを含め、駆動電流設定部425の処理制御については後に説明される。レジスタ401に駆動波形データがセットされると、制御部412の制御下において、駆動部411は駆動波形を矩形波から曲線波に変更する。駆動波形切り替えによる移行処理後は、上記と同様の処理が繰り返される。駆動部411は、レジスタ401にセットされた駆動電流データに応じて、曲線波形の駆動電流によってスピンドル・モータ125を駆動する。
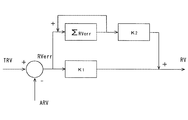
次に、駆動電流設定部425の構成及び動作について、説明する。本形態における駆動電流設定部425のフィードバック系500の構成が、図6に示されている。フィードバック系は、目標回転速度(TRV)と回転速度決定部423から取得した実際の回転速度(ARV)との差分(RVerr)に基づいて駆動電流を決定する。まず、目標回転速度(TRV)と実際の回転速度(ARV)との差分(RVerr)を算出する。差分(RVerr)にゲインK1をかけた値(RVerr・K1)を算出する。また、差分(RVerr)のシグマ(ΣRVerr)を算出し、シグマにゲインK2をかけた値(ΣRVerr・K2)を算出する。この(RVerr・K1)と(ΣRVerr・K2)から、駆動電流値が算出される。
駆動電流設定部425は、駆動波形の切り替えに応答して、ゲインを変更する。ゲインの変更は、K1、K2の一方もしくは双方について行われる。本例における矩形波210と曲線波220との間において駆動トルクが異なることから、駆動波形に応じたゲインが設定される。具体的には、矩形波210によるトルクが曲線波220によるトルクよりも小さく、矩形波210のゲインが曲線波220のゲインよりも大きい。矩形波210のゲインが大きいことから、ロード時において矩形波210によってスピンドル・モータを駆動することによって、ロードによる風損で磁気ディスク121の回転数が大きく下がることを抑制することができる。
図7は、駆動電流設定部425の処理を説明するタイミング・チャートである。図7に示すように、フェーズ信号の6周期が磁気ディスク121の1回転に相当する。また、駆動電流データの設定は、フェーズ信号あるいは回転周期と同期して実行される。駆動電流データは、実際の回転速度と目標回転速度の差分に応じて決定される。実際の回転速度は、フェーズ信号6周期(1回転周期)の時間を測定することによって決定される。従って、前回の駆動電流データ決定のタイミングから、フェーズ信号6周期の時間を測定することによって、今回の駆動電流データを決定することができる。例えば、駆動電流データAを決定したタイミングから、フェーズ信号6周期後のタイミングの間の時間測定によって、実際の回転速度を決定する。この回転速度に応じて、駆動電流設定部425が駆動電流データBを設定する。
本形態の駆動電流設定部425は、駆動波形が切り替えられた直後の駆動電流データの設定において、切り替え後のフェーズ信号あるいは回転速度検出部の検出信号とは独立に、駆動電流を決定する。具体的には、実際の回転速度と目標回転速度の差分に応じた演算処理がスキップされる。駆動電流設定部425は、前回に設定した駆動電流データBと同じデータBを、レジスタ401にセットする。その次のタイミングにおいては、通常の演算処理を実行して駆動電流データを設定する。図7においては、駆動電流データBの再セットの後において、フェーズ信号6周期の時間を測定することによって、駆動電流データCが設定される。
駆動電流が変化することによって、SPMドライバ136による検出が乱され、生成されるフェーズ信号にずれが発生する可能性がある。このため、実際には回転速度に大きな変化がないにも関わらず、回転速度決定部423もしくは駆動電流設定部425が、回転速度に変化があったと誤認識する可能性がある。図7(b)は、駆動波形が切り替わったことによるタイミングのずれを例示している。曲線波駆動が連続して行われた場合に想定されるタイミングに対して、駆動波形変化によるフェーズ信号の乱れによって、実際に検出される1回転周期の長さにずれが生ずる。このため、1回転周期の測定時間が本来の値と異なることによって、誤った回転速度が算出される。
図7、図8を参照して、波形変化に応じた駆動電流設定部425の設定処理について説明する。駆動電流設定部425は、回転速度決定部423から、実際の回転速度を取得する(S801)。駆動波形の変更がない場合、第1のゲインのフィードバック系により、駆動電流を決定する(S802)。駆動電流データに対応する駆動電流データをレジスタ401にセットする(S803)。次のタイミングにおいて波形データが曲線波に切り替わった場合、フィードバック系による処理を行うことなく駆動電流を決定し、直前のタイミングにおける駆動電流データと同一の駆動電流データをレジスタ401にセットする(S804)。次のタイミングにおいて、回転速度決定部423から、実際の回転速度を取得し(S805)、第2のゲインのフィードバック系により、駆動電流を決定する(S806)。以下、S805、806の処理が繰り返される。
駆動波形が変化した後の最初の駆動電流データ設定において、フィードバック演算をスキップすることによって、実際の回転速度を誤って算出し、誤った駆動電流を設定することを避けることができる。これによって、誤制御によるスピンドル・モータの回転変動を防止することができる。駆動波形切り替え後に回転速度の変動は小さいものと考えられるので、駆動電流データとしては、前回と同じデータを設定することが好ましい。あるいは、駆動電流データをセットすることなく(駆動電流が0を意味する)、スピンドル・モータをフリーラン状態にセットすることも可能である。もしくは、予め定められたデフォルト値を駆動電流データとして設定することが可能である。尚、フィードバック演算をスキップ回数は、複数回であることも可能である。
尚、回転速度決定部423が決定処理を行うことなく、前回と同一の回転速度を実際の回転速度として駆動電流設定部425に渡すことによって、フェーズ信号のずれによる誤った回転速度の決定、あるいは誤った駆動電流の設定を避けることが可能である。本発明は、データの記録及び再生を行うデータ記憶装置の他、データ再生、あるいはデータ記録のみを行うデータ記憶装置に適用することができる。この場合、磁気ヘッドは、再生素子あるいは記録素子のみを有する。本発明は、磁気記憶装置の他、光学的、磁気光学的な記憶装置など、様々なタイプのデータ記憶装置に適用することが可能である。また、本発明は、データ記憶装置の他、モータの起動処理を行う様々な装置に適用することが可能である。
100 データ処理システム、110 ホスト、120 ハードディスク・ドライブ、
121 磁気ディスク、122 磁気ヘッド、123 ヘッド・スタック・アセンブリ、
124 コントローラ、125 スピンドル・モータ、126 VCM、
127 リード・ライト・チャネル、128 ハードディスク・コントローラ、
129 MPU、130 メモリ、133 サーボ・コントローラ、
134 モータ・ドライバ・ユニット、135 VCM136 ドライバ、
210 矩形波、220 曲線波、310 ランプ、311 斜面、312 斜面、
313 パーキング面、320 タブ、401 レジスタ、410 回転数検出部、
410 回転速度検出部、411 駆動部、412 制御部、421 分周部、
422 タイマ、423 回転速度決定部、424 駆動波形決設定部、
424 駆動波形設定部、425 駆動電流設定部、426 制御部、
500 フィードバック系
121 磁気ディスク、122 磁気ヘッド、123 ヘッド・スタック・アセンブリ、
124 コントローラ、125 スピンドル・モータ、126 VCM、
127 リード・ライト・チャネル、128 ハードディスク・コントローラ、
129 MPU、130 メモリ、133 サーボ・コントローラ、
134 モータ・ドライバ・ユニット、135 VCM136 ドライバ、
210 矩形波、220 曲線波、310 ランプ、311 斜面、312 斜面、
313 パーキング面、320 タブ、401 レジスタ、410 回転数検出部、
410 回転速度検出部、411 駆動部、412 制御部、421 分周部、
422 タイマ、423 回転速度決定部、424 駆動波形決設定部、
424 駆動波形設定部、425 駆動電流設定部、426 制御部、
500 フィードバック系
Claims (18)
- 記憶ディスクと、前記記憶ディスクを回転するモータと、前記記憶ディスクの記憶領域へアクセスするヘッドとを有する記憶装置の制御方法であって、
(a)前記モータの回転速度検出のための信号を取得するステップと、
(b)前記取得された信号に基づいて前記モータの回転速度を決定するステップと、
(c)前記決定された回転速度と目標速度とを比較して、所定タイミングに従って前記モータに供給する駆動電流を決定するステップと、
(d)前記モータに供給する駆動電流の波形を変化するステップと、
(e)前記波形変化後の最初のタイミングにおいて、前記波形変化後の前記回転速度検出のための信号とは独立に、前記モータに供給する駆動電流を決定するステップと、
を有する記憶装置の制御方法。 - 前記ステップ(e)において決定される駆動電流は、前記波形変化後の最初のタイミングの直前のタイミングに決定された駆動電流と同じである、請求項1に記載のモータ制御方法。
- 前記ステップ(d)において、前記ヘッドが回転する前記記憶ディスク上に在るタイミングにおいて、前記モータに供給する駆動電流の波形を変化する、請求項1に記載の記憶装置の制御方法。
- 前記記憶ディスクからサーボ・データを取得するステップをさらに備え、
前記ステップ(d)において、前記サーボ・データに基づき決定されたタイミングにおいて、前記駆動電流の波形が変化する、
請求項3に記載の記憶装置の制御方法。 - 前記ステップ(d)において、予め定められた連続回数サーボ・データが取得されたタイミングにおいて、前記駆動電流の波形が変化する、請求項4に記載の記憶装置の制御方法。
- 前記ステップ(d)の前に、前記磁気ディスクの外から回転する前記磁気ディスク上に、前記ヘッドを移動するステップをさらに備え、
前記ステップ(d)において、前記ヘッドが回転する前記記憶ディスク上に在るタイミングにおいて、前記モータに供給する駆動電流の波形を変化する、請求項1に記載の記憶装置の制御方法。 - 前記ステップ(d)において、前記駆動電流の波形は、第1の波形から第2の波形に変化し、
前記第1の波形の最大電流値は前記第2の波形の最大電流値よりも小さい、請求項6に記載の記憶装置の制御方法。 - 前記ステップ(e)の後に、前記ステップ(a)から(c)を繰り返すステップをさらに備え、
前記ステップ(e)の前の前記ステップ(c)において、第1のゲインのフィードバック処理によって駆動電流が決定され、
前記ステップ(e)の後の前記ステップ(c)において、前記第1のゲインよりも小さい第2のゲインのフィードバック処理によって駆動電流が決定される、
請求項6に記載の記憶装置の制御方法。 - 前記ステップ(d)において、前記駆動電流の波形は、第1の波形から第2の波形に変化し、
前記第2の波形のスルーレートは前記第1の波形のスルーレートよりも小さい、請求項1に記載の記憶装置の制御方法。 - (a)モータから、前記モータの回転速度検出のための信号を取得するステップと、
(b)前記取得された信号に基づいて前記モータの回転速度を決定するステップと、
(c)前記決定された回転速度と目標速度との差分に基づき、前記モータに供給する駆動電流を決定するステップと、
(d)前記決定された駆動電流を前記モータに供給するステップと、
(e)前記モータに供給する駆動電流の波形を変化するステップと、
(f)前記波形変化後の最初のタイミングにおいて、前記波形変化後の前記回転速度検出のための信号とは独立に、前記モータに供給する駆動電流を決定するステップと、
(g)前記波形変化後に決定された駆動電流を前記モータに供給するステップと、
を有するモータの制御方法。 - 前記ステップ(f)において決定される駆動電流は、前記波形変化後の最初のタイミングの直前のタイミングに決定された駆動電流と同じである、請求項10に記載のモータ制御方法。
- 前記回転速度検出のための信号は、前記モータのコイルに誘起される誘起電圧を検出することによって生成される、請求項10に記載のモータ制御方法。
- 記憶ディスクと、前記記憶ディスクを回転するモータと、前記モータを制御するモータ制御部とを有する記憶装置であって、前記モータ制御部は、
前記モータの回転に応じて生成される信号を、前記モータから取得する信号取得部と、
前記取得された信号に基づいて前記モータの回転速度を決定する回転速度決定部と、
前記モータに供給する駆動電流の波形を決定する波形決定部と、
前記回転速度決定部が決定した回転速度と予め決定されている回転速度に基づき、所定タイミングに従って前記モータに供給する駆動電流値を決定し、前記駆動電流の波形が変化した後の最初のタイミングにおいて、前記駆動波形変化後の前記信号とは独立に前記駆動電流値を決定する、駆動電流決定部と、
前記駆動電流決定部によって決定された駆動電流値と、前記波形決定部によって決定された駆動波形に応じた駆動電流を、前記モータに供給する駆動部と、
を有する記憶装置。 - 前記ディスクの記憶領域へアクセスするヘッドをさらに備え、
前記ヘッドが前記ディスク上に在るタイミングにおいて、前記駆動波形が変化する、
請求項13に記載の記憶装置。 - 前記ディスクの記憶領域へアクセスするヘッドと、前記ヘッドを移動する移動機構とをさらに備え、
前記移動機構が、前記ディスクの外から回転する前記ディスク上に前記ヘッドを移動し、前記ヘッドが前記ディスク上に在るタイミングにおいて、前記駆動波形決定部は、第1の駆動波形から第2の駆動波形に変化するように前記駆動波形を決定し
前記第1の駆動波形の最大電流値は、前記第2の駆動波形の最大電流値よりも小さい、
請求項13に記載の記憶装置。 - 前記ディスクの記憶領域へアクセスするヘッドと、前記ヘッドを移動する移動機構とをさらに備え、
前記移動機構が、前記ディスクの外から回転する前記ディスク上に前記ヘッドを移動し、前記ヘッドが前記ディスク上に在るタイミングにおいて、前記駆動波形決定部は、第1の駆動波形から第2の駆動波形に変化するように前記駆動波形を決定し、
前記駆動電流決定部は、前記回転速度決定部が決定した回転速度が前記予め決定されている回転速度に近づくように、フィードバック系によって前記駆動電流値を決定し、
前記第1の駆動波形に対する前記フィードバック系のゲインは、前記第2の駆動波形に対する前記フィードバック系のゲインよりも大きい、
請求項13に記載の記憶装置。 - 前記駆動電流決定部が前記駆動電流の波形が変化した後の最初のタイミングにおいて決定する駆動電流値は、直前のタイミングで決定された駆動電流値と同一の値である、請求項13に記載の記憶装置。
- 前記記憶ディスクからサーボ・データを取得するサーボ・データ取得部をさらに備え、
前記駆動波形決定部は、取得された前記サーボ・データに基づき決定されたタイミングにおいて、第1の駆動波形から第2の駆動波形に変化させる、請求項14に記載の記憶装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004017993A JP2005218154A (ja) | 2004-01-27 | 2004-01-27 | 記憶装置の制御方法、モータ制御方法及び記憶装置 |
| US11/030,700 US7133236B2 (en) | 2004-01-27 | 2005-01-05 | Storage device control method, motor control method, and storage device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004017993A JP2005218154A (ja) | 2004-01-27 | 2004-01-27 | 記憶装置の制御方法、モータ制御方法及び記憶装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005218154A true JP2005218154A (ja) | 2005-08-11 |
| JP2005218154A5 JP2005218154A5 (ja) | 2007-02-08 |
Family
ID=34792523
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004017993A Withdrawn JP2005218154A (ja) | 2004-01-27 | 2004-01-27 | 記憶装置の制御方法、モータ制御方法及び記憶装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7133236B2 (ja) |
| JP (1) | JP2005218154A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8838257B1 (en) * | 2007-10-04 | 2014-09-16 | Marvell International Ltd. | Controller and design support apparatus |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0775094B2 (ja) * | 1987-10-15 | 1995-08-09 | 株式会社東芝 | 磁気記録再生装置 |
| JP3136321B2 (ja) * | 1991-07-15 | 2001-02-19 | ローム株式会社 | モータ制御回路およびモータ制御装置 |
| JP3415288B2 (ja) * | 1993-11-09 | 2003-06-09 | 株式会社東芝 | 情報記録再生装置 |
| JPH1064184A (ja) | 1996-08-23 | 1998-03-06 | Toshiba Corp | データ記録再生装置及びディスク回転用モータ回転制御方法 |
| JP3958819B2 (ja) * | 1997-01-31 | 2007-08-15 | ミネベア株式会社 | 情報記憶装置の記録円盤駆動装置に用いられる2相クローポール型ステッピングモータの駆動方法 |
| US6163118A (en) * | 1998-11-20 | 2000-12-19 | Texas Instruments Incorporated | Method and apparatus for controlling a motor in a mass storage device |
| JP2001014789A (ja) | 1999-06-30 | 2001-01-19 | Toshiba Corp | ディスク記憶装置及びスピンドルモータ制御装置 |
| JP2001101784A (ja) * | 1999-09-27 | 2001-04-13 | Internatl Business Mach Corp <Ibm> | ディスクドライブ装置およびその制御方法 |
| US6624964B1 (en) * | 1999-12-21 | 2003-09-23 | Maxtor Corporation | Method and apparatus for reducing seek acoustics in disk drives for AV systems |
| JP2001309682A (ja) * | 2000-04-20 | 2001-11-02 | Matsushita Electric Ind Co Ltd | スピンドルモータ駆動方法およびスピンドルモータ駆動回路と磁気ディスク駆動方法および磁気ディスク装置 |
| JP4647136B2 (ja) * | 2001-05-31 | 2011-03-09 | ルネサスエレクトロニクス株式会社 | 磁気ディスク記憶装置 |
| US6697207B2 (en) * | 2001-06-22 | 2004-02-24 | Iomega Corporation | Method and circuit for providing velocity-controlled head loading or unloading |
| JP2003304694A (ja) * | 2002-04-04 | 2003-10-24 | Internatl Business Mach Corp <Ibm> | データ記憶装置、回転制御装置及び回転制御方法 |
-
2004
- 2004-01-27 JP JP2004017993A patent/JP2005218154A/ja not_active Withdrawn
-
2005
- 2005-01-05 US US11/030,700 patent/US7133236B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7133236B2 (en) | 2006-11-07 |
| US20050162773A1 (en) | 2005-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5080411B2 (ja) | ディスク・ドライブ及びヘッド・スライダ上の素子のコモン電位調整方法 | |
| JP2006221733A (ja) | データ記憶装置及びその制御方法 | |
| KR100712559B1 (ko) | 기준 클럭 주파수 조정 방법 및 장치와 이를 이용한 디스크드라이브 | |
| JP2003249044A (ja) | 磁気ディスクドライブシステム | |
| JP4708112B2 (ja) | メディアにパターンを書き込む方法及びデータ記憶装置 | |
| KR100487831B1 (ko) | 서보 라이트 방법 | |
| JP2008237014A (ja) | モータ駆動方法、ディスクドライブ及びコンピュータで読み取り可能な記録媒体 | |
| US7570446B2 (en) | Disk drive with improved format efficiency and control method thereof | |
| US7570448B2 (en) | Write-once type storage apparatus, control method and record control circuit | |
| JP2009217917A (ja) | ディスク記憶装置及びサーボ制御方法 | |
| JP5064666B2 (ja) | データ記憶装置及びそのユーザ・データの書き込み制御方法 | |
| JP2006221732A (ja) | データ記憶装置及びその制御方法 | |
| JP2005204390A (ja) | データ記憶装置、モータ制御装置及びモータ制御方法 | |
| JP2011123966A (ja) | ディスクへサーボ・ライト・トラックを書き込む方法及びディスク・ドライブ | |
| US20070279790A1 (en) | Adjustable output voltage regulator for disk drive | |
| JP2005071433A (ja) | ヘッド制御方法および記録装置 | |
| US8125729B2 (en) | Disk drive and error-recovery processing method | |
| US7643239B2 (en) | Controller selection to reduce written-in run-out | |
| JP2005218154A (ja) | 記憶装置の制御方法、モータ制御方法及び記憶装置 | |
| JP2006209955A (ja) | 供給電圧変動を考慮した探索サーボ制御方法とこれを利用したディスクドライブおよびコンピュータで読み取り可能な記録媒体 | |
| JP2001291346A (ja) | ディスク装置およびヘッド位置制御方法 | |
| JP5064661B2 (ja) | セクタパルスのタイミング制御方法,サーボゲートパルスのタイミング制御方法およびディスクドライブ | |
| JP4971907B2 (ja) | ディスクの回転スリップによるデータセクターの位相補正方法およびディスクドライブ装置 | |
| KR100723499B1 (ko) | 하드디스크 드라이브의 서보 라이트 클럭 발생 방법 및이에 적합한 기록 매체 | |
| JP2010040146A (ja) | サーボ・パターンの書き込み方法及びディスク・ドライブ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061218 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070514 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090515 |