JP2007506338A - 電子的センシング回路 - Google Patents
電子的センシング回路 Download PDFInfo
- Publication number
- JP2007506338A JP2007506338A JP2006526772A JP2006526772A JP2007506338A JP 2007506338 A JP2007506338 A JP 2007506338A JP 2006526772 A JP2006526772 A JP 2006526772A JP 2006526772 A JP2006526772 A JP 2006526772A JP 2007506338 A JP2007506338 A JP 2007506338A
- Authority
- JP
- Japan
- Prior art keywords
- circuit
- upward
- output
- digital
- downward
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D3/00—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups
- G01D3/02—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups with provision for altering or correcting the law of variation
Abstract
センサ(10)は、第1の比較器入力端に結合される出力端を有する。制御回路(18)は、上方向追跡モードから、下方向相対レベル検出モード、下方向追跡モード、上方向相対レベル検出モード、そして再び上方向追跡モードに、次々に切り換わるように構成される。第1および第2のディジタル・アナログ変換回路(14a、b)は、制御回路(18)からそれぞれ第1および第2のディジタル制御値を受け取る。制御可能コンバイナ回路(16)は、第1および第2のディジタル・アナログ変換回路(14a、b)の出力端に結合された入力端と、第2の比較器入力端に結合された出力端とを有し、制御回路(18)は、コンバイナ回路(16)が、上方向および下方向追跡モードではそれぞれ第1および第2のディジタル・アナログ変換回路(14a、b)によって決まる第1および第2のコンバイナ出力信号を第2の比較器入力端に供給し、相対レベル検出モードでは第1および第2のコンバイナ出力信号の平均値に対応する第3のコンバイナ出力信号を第2の比較器入力端に供給させるために、制御可能コンバイナ回路(16)に結合された、第1の出力端を有する。制御回路(18)は比較器(12)の出力端に結合された入力端を有し、制御回路(18)は、上方向追跡モードでは、第1のディジタル・アナログ変換回路(14a)による、センシング信号の上方向変化に対する一方向性の上方向追跡を制御し、上方向追跡モードでは、第2のディジタル・アナログ変換回路(14b)による、センシング信号の下方向変化に対する一方向性の下方向追跡を制御する。
Description
未知のまたはドリフトを伴うオフセット電圧は、アナログ・センサからの出力信号を電子的に処理する際、しばしば問題となる。センシング信号が所定のレベルを横切る時点について、あるいは所与の時点における所定のレベルに対するセンシング信号の相対的なレベルについての情報など、ディジタル的に処理できる情報を得るためには、センシング信号は基準レベルと比較されなければならない。オフセット電圧は、基準レベルにおいても、基準レベルとセンシング信号を比較する比較器回路においても、この比較を不明確にする。
基準電圧のドリフトの問題に対する1つの解決方法は、センシング信号がとる最小および最大レベルに対して相対的に基準レベルを定義することである。これは、センスされているパラメータの関数として、最小値と最大値の間で繰り返し変化する信号をセンスするためには特に有用である。そうするためには、アナログ的な解決方法もディジタル的な解決方法も可能である。アナログ的な解決方法では、最小値と最大値を確立するためにダイオードとコンデンサを有するピークレベル検出器を用いることもでき、分圧器ネットワークと組み合わされて、確立された最小値と最大値から基準レベルが生成される。残念ながら、このような解決方法は、電流漏洩の問題があり、センサ回路でしばしば経験される高温環境で特にきびしい。
ディジタル的な解決方法では、信号のA/D変換が行われ、最小および最大ディジタル値が決まり、基準レベルを算定するために用いられる。これは、ディジタル的な後処理解決策において、その他のディジタル化された値をディジタル・スケーリングするために用いることもできるが、このような後処理ではセンシング信号が所定のレベルを横切る時点を正確に決定することができないし、またこの解決方法は高い分解能が必要である。もう1つの実施形態では、最小値および最大値のディジタル値を用いて基準レベルがディジタル的に算定され、算定された基準レベルはアナログ値に再変換されて、センシング信号とアナログ的に比較される。したがって、遷移のタイミングは保存される。しかし、このような解決方法はかなりの回路オーバヘッドを伴い、またセンシング信号を生成された基準レベルと比較する比較器において依然としてオフセットを生じ得る。
中でも、本発明の一目的は、センシング信号と比較するために、アナログ的解決策に固有の未知のオフセットやドリフトがない基準レベルを定義し、かつ完全にディジタル的解決策における高いオーバヘッドを必要としない、電子的センシング回路を提供することである。
本発明は、請求項1に記載の、電子的センシング回路を提供する。この回路は、センシング信号を、最小値および最大値を用いて生成される基準レベルと比較する。この回路では、最小値および最大値を決めるための比較でも、センシング信号と基準レベルとの比較でも、すべての重要な比較は同じ比較器を用いて行われる。したがって、この比較器にオフセットがあっても、結果に影響しない。この回路は、センシング信号の1つの期間中に、最小値と最大値を決定するため、相対レベル検出モードと追跡モードとの間で切り換わる。最大値と最小値は、D/A変換回路を用いて生成される。上方向および下方向追跡モードでは、それぞれ、第1および第2のディジタル制御信号によって決まる信号が基準レベルとして比較器へ供給され、比較器がセンシング信号が供給される基準レベルよりそれぞれ低くなったことおよび高くなったことを示すまで、当該のD/A変換回路がセンシング信号の変化をそれぞれの方向にのみ追跡する。
制御信号の値に応答してそれぞれ最大値と最小値を生成する、第1および第2のD/A変換回路を用いることが好ましい。こうすると、変換誤差の影響が低減する。上方向および下方向追跡モードでは、それぞれ第1および第2のD/A変換回路の出力によって支配される信号が基準レベルとして比較器へ供給され、比較器がセンシング信号が供給される基準レベルよりそれぞれ低くなったことおよび高くなったことを示すまで、当該のD/A変換回路がセンシング信号の変化をそれぞれの方向にのみ追跡する。
相対レベル検出モードでは、上方向および下方向追跡モードで基準レベルとして供給された信号の平均値が、基準レベルとして比較器へ供給される。平均する際、これらの信号は等しく重み付けされることが好ましいが、他の実施形態では、たとえば最小値および最大値に対して相対的な多ビットA/D変換の一部として、センシング信号を複数のレベルと比較するために比較器が用いられる場合、等しくない重みを用いることもできる。上方向および下方向追跡モードにおいて、基準レベルとして供給される信号は、それぞれ他方のD/A変換回路に影響されずに、専ら第1および第2のD/A変換回路により決定されることが好ましい。しかし、基準レベルとして供給される信号が相互依存性を有する場合は、結果は影響を受けない。センシング信号が、供給された基準レベルを横切ったことを比較器が示すまで、回路は相対レベル検出モードを維持することが好ましい。
D/A変換器がセンシング信号を追跡する追跡モードへの切換え時点またはその前に、D/A変換回路のディジタル制御値を、上方向追跡の場合は前の上方向追跡モード時にとった値より低い値に、下方向追跡の場合は前の下方向追跡モード時にとった値より高い値にリセットするように、制御回路が構成されることが好ましい。それによって、センシング信号が示す最大値および最小値の時間変化を補償することができる。ディジタル制御値は、可能な最小値および最大値にリセットされることが好ましい。ただし一実施形態では、それらの値は、たとえば所定の数のディジタル・ステップだけ下げるあるいは上げることにより、より少ない程度にリセットすることもできる。それによって、極小または極大があることによる誤差に対する保護が得られる。
比較器の出力端には、相対レベル検出モードでは比較器の出力信号を通過させ、追跡モードでは前の信号を保持する、ラッチが設けられることが好ましい。それにより、ラッチに続く後続回路にとって、基準レベル選択の機構はトランスペアレントとなる。
追跡モードから相対レベル検出モードへの切換えは、最大値または最小値を通過したことが検出されたときに、自動的に行われることが好ましい。これはたとえば、上方向および下方向追跡モードにおいて、所定長さの時間間隔の間、それぞれ上方向あるいは下方向へのD/A変換器の出力信号の変化が必要でなかったことを検出することにより実現することができる。別の実施形態では、これは、上方向および下方向追跡モードにおいて、センシング信号がそれぞれ最大値または最小値から、ある閾値レベルより大きく降下あるいは上昇したかどうかを検出することによって検出される。相対レベル検出モードへの切換えに必要な比較は、最大値および最小値の確立ならびに相対レベル検出にも用いられる比較器を使用して行うのが有利であるが、相対レベル検出時には、これらの比較は基準レベルに直接影響を与えないので、別の比較器を用いることもできる。
本発明のこれらおよび他の目的ならびに有利な態様について、以降の図を用いて非限定的に説明する。
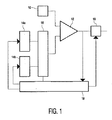
図1は、センシング部10、比較器12、1対のディジタル・アナログ(D/A)変換回路14a、b、切換可能コンバイナ回路16、制御回路18、およびラッチ19を含むセンサ回路を示す。D/A変換回路14a、bは、コンバイナ回路16に結合されたアナログ信号出力端を有する。センシング部10および切換可能コンバイナ回路16は、比較器12の入力端に結合された出力端を有し、比較器12はラッチ19に結合された出力端を有する。制御回路18は、比較器12の出力端に結合された入力端と、D/A変換回路14a、bの入力端、切換可能コンバイナ回路16、およびラッチ19に結合されたディジタル信号出力端とを有する。
動作時においては、センシング部は、最小値と最大値の間を上下する振動的な性質を有するセンシング信号を発生する。関連する情報は、センシング信号が最小値と最大値の中間のレベルを横切る時点に含まれる。
一実施形態では、センサ回路は、センシング部10からのセンシング信号が、センシング部10のセンシング信号の最大値および最小値に対して相対的な所定のレベル(通常は中間のレベル)を横切る時点と一定の関係を有する時点で、ラッチ19の出力に信号レベル遷移を生じさせるように機能する。このような単一レベル(通常は中間のレベル)の使用は、本発明の重要な応用例を説明するためのものであるが、他の応用例も可能であり、最小値および最大値に対して相対的に定義された複数レベルとの比較も可能である。これは、たとえば多ビットのアナログ・ディジタル変換器において使用することができる。同様に、レベル・クロッシングとの正確なタイミング関係を保存することはある応用例では重要であるが、他の応用例では特定の時点でセンシング信号があるレベルより大きいかそれとも小さいかを判定するだけで十分かもしれない。その場合は、レベル・クロッシングの時間を保存する必要はない。
すべての重要な比較、すなわち、最小値および最大値を決定するのに必要な比較も、最小値および最大値に対して相対的に定義された(中間のレベルなど)1つあるいは複数のレベルとの比較も、比較器12によって行われ、したがって比較器12のオフセットが有ったとしても、時点を決定する際に何の役割も果たさない。すべての必要な比較は、1つの比較器12を用いてなされるのが好ましいが、センシング信号と比較されるレベルに直接影響を与えない比較は、本発明から逸脱することなく、別の比較器を用いて行うこともできる。
図2は、最大値22、最小値23、および中間のレベル21を有する、センシング部10からのセンシング信号20の例を示す。制御回路は、それぞれ時間間隔28a〜dの間、周期的に4つの状態をとる。
時間間隔28aの間にとられる上方向追跡モードにおいて、制御回路18は、第1のD/A変換回路14aを、センシング信号20の上方向の変化に追従させる。この状態では制御回路18は、コンバイナ回路16に、第1のD/A変換回路14aからの電圧を出力させる。比較器12は、この電圧を、センシング部10からのセンシング信号20と比較する。比較器12からの出力信号が、第1のD/A変換回路14aからの電圧がセンシング信号20より低いことを示す場合は、第1のD/A変換回路14aからの電圧がセンシング信号20より高いことを比較器12が示すまで、制御回路18は第1のD/A変換回路14aのディジタル入力信号を段階的に増加させる。この上方向追跡状態では、制御回路18は、ラッチ19にその論理出力値(論理ハイレベル値)を保持させる。制御回路18は、上方向追跡状態に切り換わるとき、まず第1のD/A変換回路14aのディジタル入力信号を、とられるであろう最大値より低いレベル、通常は可能な最小のレベルにリセットする。
時間間隔28b、28dの間にとられる上方向および下方向相対レベル検出状態においては、制御回路18は比較器に、センシング信号20を、D/A変換回路14a、bの出力信号の平均値と比較させる。これらの状態において、制御回路18は、D/A変換回路14a、bのディジタル入力信号を一定に保ち、コンバイナ回路16に、D/A変換回路14a、bの出力電圧の平均値を出力させる。この間、制御回路18は、ラッチ19に、比較器12の出力信号に従う信号を出力させる。
時間間隔28cの間にとられる、制御回路の下方向追跡状態は、制御回路18が第2のD/A変換回路14bにセンシング信号20の下方向の変化に追従させる点を除いて、上方向追跡状態と同じである。この下方向追跡状態では、制御回路18は、ラッチ19に、下方向相対レベル検出状態の最後における比較器の論理出力値(論理ローレベル値)を保持させる。制御回路18は、下方向追跡状態に切り換わるとき、まず第2のD/A変換回路14aのディジタル入力信号を、とられるであろう最小値より高いレベル、通常は可能な最大のレベルにリセットする。
その結果生じるラッチ19の出力はトレース29に示され、実線部分はラッチ19が比較器12の出力に従うことを示し(時間間隔28b、dの間の上方向および下方向相対レベル検出状態)、破線はラッチが前の値を保持することを示している(時間間隔28b、dの間の上方向および下方向追跡状態)。
制御回路18は、状態間の遷移を様々な形でトリガすることができる。一例では、制御回路18は、第1のD/A変換回路14aに加えられるディジタル入力信号が増大することなく所定長さの時間間隔が生じた時点25で、上方向追跡状態から下方向相対レベル検出状態へ切り換わる。同様に、制御回路18は、第2のD/A変換回路14bに加えられるディジタル入力信号が減少することなく所定長さの時間間隔が生じた時点25において、下方向追跡状態から上方向相対レベル検出状態へ切り換わる。下方向相対レベル検出状態から下方向追跡状態への切換え、および上方向相対レベル検出状態から上方向追跡状態への切換えは、時間間隔28b、dの間の比較器12の出力信号のレベル変化に応答して生じることができる。相対レベル検出状態と追跡状態の間には、追跡状態の前に、当該のD/A変換回路14a、bのディジタル入力信号をリセットするために中間的な状態が設けられることが好ましい。
別の実施形態では、制御回路18は、センシング信号が、第1および第2のD/A変換回路14a、bから出力される電圧の差に対する所定の割合を超えるだけ、第1のD/A変換回路14aの出力電圧を下回る時点25で、上方向追跡状態から下方向相対レベル検出状態に切り換わる。同様に、この実施形態では制御回路18は、センシング信号が、第1および第2のD/A変換回路14a、bから出力される電圧の差に対する所定の割合を超えるだけ、第1のD/A変換回路14aの出力電圧を上回る時点25で、下方向追跡状態から上方向相対レベル検出状態に切り換わる。
図3は、センシング部10の一実施形態を示す。この実施形態は、センシング抵抗30a〜dからなるホイートストン・ブリッジ、およびホイートストン・ブリッジの出力端に結合された差動センス増幅器32を含む。センス増幅器32のシングルエンド形出力端34は、比較器12(図示せず)の入力端に結合される。典型的な実施形態では、カム・ホイールの回転などセンスされるべき外部要因の影響により、4個のセンシング抵抗30a〜dの抵抗値が、ほぼ同じ波形であるが互いに異なった位相で周期的に変化する。この場合、センシング抵抗はホイートストン・ブリッジに接続されてよく、したがってホイートストン・ブリッジの出力端での、供給端子に対する相対的な電圧は、同じ波形であるが互いに異なった位相で変化する。
図4は、第1および第2のD/A変換回路14a、bを実施するために用いることができるD/A変換器の一実施形態を示す。このD/A変換器は、抵抗型分圧器ネットワーク40と、スイッチング回路42を含む。分圧器ネットワークは、2つの電源接続部Vdd、Vssの間に直列に結合された複数の抵抗を含む。抵抗間のノードは、スイッチング回路42のそれぞれのスイッチング・トランジスタの主の電流チャネルを介して共通の出力端44に結合される。制御回路18(図示せず)は、インターフェース46を介してトランジスタの制御電極に結合され、出力端44のアナログ出力電圧を制御するために、選択された1つのトランジスタを導通させる。抵抗型分圧器ネットワーク40は、第1および第2のD/A変換回路14a、bにより共有され、各D/A変換回路14a、bはそれ自体のスイッチング回路42を有することが好ましい。
図5は、切換可能コンバイナ回路の一実施形態を示す。この回路は、差動入力端を有する1対のバッファ増幅器50a、bを含み、その負入力端(そこでの電圧上昇は、出力信号の降下をもたらす)はバッファ増幅器50a、bの出力端に結合され、正入力端は対応するD/A変換回路14a、b(図示せず)の出力端に結合される。バッファ増幅器50a、bの出力端は、それぞれ抵抗素子52a、bとスイッチ54a、bのそれぞれの直列接続を介してコンバイナ回路の出力端56に結合される。抵抗素子52a、bは、等しい値を有する。スイッチ54a、bは、制御回路18(図示せず)により制御され、制御回路は、上方向および下方向追跡状態ではそれぞれ一方のスイッチ54aおよび他方のスイッチ54bを導通させ、上方向および下方向相対レベル検出状態では両方のスイッチ54a、bを導通させる。もちろん、バッファ増幅器50a、bの代わりにエミッタまたはソース・フォロワを用いることもでき、1より大きい増幅率は必要ない。
図6は、ステートマシン60、1対のカウンタ64a、b、および1対の論理ゲート66a、bを含む、制御回路18の一実施形態を示す。比較器12(図示せず)の出力端に結合された入力端62は、ステートマシン60、および論理ゲート66a、bを介してカウンタ64a、bのクロック入力端に結合される。ステートマシン60は、カウンタ64a、bのリセット入力端、および論理ゲート66a、bを介してカウンタ64a、bのクロック入力端に結合された出力端を有する。さらに、ステートマシン60は、切換可能コンバイナ回路(図示せず)、およびラッチ(図示せず)に結合された出力端を有する。
動作時においては、ステートマシン60は、様々な状態の間を切り換わる。上方向追跡状態に切り換わるとき、ステートマシン60は、カウンタの1つ64a(最大値カウンタ)に一時的にリセット信号を供給し、続いて比較器12の出力端からの信号が最大値カウンタ64aへ渡されるようにする。ステートマシンは、ラッチ19にその出力データを保持するように指示し、およびコンバイナ回路16に第1のD/A変換回路14aからの信号を通過させるように指示する。最大値カウンタ64aの出力は、第1のD/A変換回路14aによるD/A変換を制御する。この目的では、最大値カウンタ64aは、カウンタ64aがカウントアップするにつれて、分圧器構造40中の次々に高くなるノードに結合されたスイッチング回路42のトランジスタへ論理ハイレベル信号を供給するジョンソン・カウンタでよい。
比較器12からの論理ハイレベル信号に応答して、最大値カウンタ64aは、その結果生じる第1のD/A変換回路14aの出力が、センシング信号20を超えたことを比較器12が示すまでカウントアップする。カウントアップするために、カウンタ64aにクロック・パルス(図示せず)が供給されてもよく、あるいは比較器が論理ハイレベルを出力している間、クロック・パルスに基づいてカウントアップするよう、カウンタ64aがイネーブルされてもよい。次にステートマシン60は、センシング信号20がその最大値を通過したかどうかを判定する。
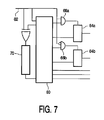
図7は、この目的のためのタイミング回路70を備えた一実施形態を示し、このタイミング回路は、比較器12が論理ハイレベルを出力するたびにリセットされ、このような論理ハイレベルなしに所定の時間が経過したとき、センシング信号20が最大値を通過したことを知らせる。センシング信号20がその最大値を超えたことの検出に応答して、ステートマシンは上方向追跡状態から下方向相対レベル検出状態へ切り換わる。
下方向相対レベル検出状態では、ステートマシン60は、カウンタ64a、bによるカウントを阻止し、コンバイナ回路に第1および第2のD/A変換回路14a、bの出力の平均値を出力させ、次いでラッチ19に比較器12からの信号を通過させる。比較器12の出力信号は、最初は論理ハイレベルであるが、センシング信号20が、第1および第2のD/A変換回路14a、bから出力される電圧の中間のレベルを通過したときに、論理ローレベルになる。この遷移で、ステートマシンは下方向追跡状態へ切り換わる。
下方向追跡状態での動作は、ステートマシンがこれからコンバイナ回路16に第2のD/A変換回路からの信号を出力させる点と、最小値カウンタ64bが最大値にリセットされた後、比較器12の出力が論理ローレベルのときカウントダウンする点を除いて、上方向追跡状態の動作と同様である。ステートマシンは、たとえばタイマを用いて所定長さの時間間隔の間、論理ローレベルが生じなかったことを検出し、センシング信号20がその最小値を通過したことを検出したとき、下方向追跡状態から上方向相対レベル検出状態へ切り換わる。
下方向相対レベル検出状態での動作は、比較器12の出力信号が論理ハイレベルに切り換わるときに、ステートマシン60が上方向追跡状態に切り換わる点を除いて、上方向相対レベル検出状態での動作と同様である。
ステートマシン60がそれ自体の状態についての情報を保存するものとしてきたが、ステートマシン60の状態の一部を制御するために、ラッチ19の出力を用いることもできることを理解されたい。
センシング信号20がその最大値または最小値を通過したことを検出するための一実装形態では、タイマ回路を用いて説明したが、他の実装形態も可能であることを理解されたい。別の実施形態では、これはセンシング信号20とD/A変換回路14a、bの出力の差から検出することもでき、上方向追跡状態では、センシング信号20が第1のD/A変換回路14aの出力よりある閾値を超えるだけ下回ったときに、ステートマシンは下方向相対レベル検出状態に切り換わる。
この閾値通過の検出は、第1のD/A変換回路14aの出力信号を、第2のD/A変換回路14bの出力信号の重み付け(たとえば1/4)より大きく重み付けして(たとえば3/4)、センシング信号20を、第1および第2のD/A変換回路14a、bの重み付き平均値と比較する追加の比較器回路(図示せず)を設けて実現することもできる。この実施形態では、追加の比較器回路(図示せず)出力端は、上方向追跡状態から下方向相対レベル検出状態へ遷移を生じさせるために、ステートマシン60の入力端に結合される。下方向追跡状態でも同様の比較が用いられるが、第1のD/A変換回路14aの出力信号が、第2のD/A変換回路14bの出力信号の重み付け(たとえば3/4)より小さく重み付けされた(たとえば1/4)重み付き平均値との比較が用いられる。
図8は、比較器12を用いてこれらの比較を実現する別の実施形態を示す。この場合、コンバイナ回路16は、第1のD/A変換回路14aの出力信号V1、第2のD/A変換回路14bの出力信号V2、平均値(V1+V2)/2、ならびに閾値(3V1+V2)/4および(V1+3V2)/4のうちの選択可能な1つを出力するように構成される。これは、バッファ増幅器50a、bの出力端子間に4個の重み付け抵抗の直列構成を含め、この直列構成中のノードのうち選択可能なノードから信号を取り出すためのスイッチを設けることにより実現することができる。上方向追跡状態では、ステートマシン60は、クロック信号に基づいて、コンバイナ回路にV1の出力と(3V1+V2)/4の出力の間をトグルさせ、V1が用いられるときは最大値カウンタ64aがインクリメントされ、(3V1+V2)/4が用いられるときはその出力が下方向相対レベル検出状態への切換えを制御するのに用いられる。同様の構成を、下方向追跡状態からの切換えに用いることができる。
後者の実施形態は、比較器12からのオフセット電圧誤差に影響されず、またセンシング信号20の周波数についての仮定条件を要しないという利点を有することを理解されたい。しかし、上方向および下方向追跡状態からの切換えのための閾値(3V1+V2)/4および(V1+3V2)/4は決定的に重要ではないので、センシング信号が十分大きい場合は追加の比較器を用いることもできる。また、もちろん1/4および3/4以外の重みを用いてもよい。しかし、たとえば平均レベルを横切った後、所定の時間間隔後のタイムアウトなど、相対レベル検出状態への切換えについて決定するその他の方法を用いることもできる。
本発明は、示された実施形態に限定されないことを理解されたい。たとえば、スイッチング回路42を含む分圧器ネットワーク40の代わりに、他の任意のタイプのD/A変換を用いることもできる。同様に、カウンタ64a、bは、D/A変換回路14a、bを制御するために任意の適切なディジタル変換回路が後続する、通常のカウンタ(たとえば0000、0001、0010、0011、0100などと、上方向にカウントするディジタル数の出力を有する)でよい。D/A変換回路14a、bは、分圧器40を共有することが好ましい。コンバイナ回路16は、たとえばD/A変換回路14a、bにより発生される電流を合計する電流加算回路など、どんなものを用いてもよい。さらにコンバイナ回路16の出力信号間の差だけが重要であり、最大値を検出する状態およびレベル・クロッシングを検出する状態で出力される電圧の差は(V1+V2)/2であるべきで、レベル・クロッシングを検出する状態および最小値を検出する状態において出力される電圧の差についても全く同様である。これらの電圧には、任意の共通オフセットを加えることもできる。D/A変換器の出力としても、比較などにおいても、電圧の代わりに電流を用いることもできる。
別個のD/A変換回路14a、bおよびコンバイナ回路16の代わりに、単一のD/A変換回路を用いることもでき、このD/A変換回路には、上方向追跡モードでは追跡のディジタル最大値、下方向追跡モードでは追跡のディジタル最小値(共に、任意選択として、最大値あるいは最小値を通過したことを検出するための値に置換される)が供給され、相対レベル検出モードではこれら最小値および最大値の(重み付けされた)ディジタル平均値が供給される。こうすると、D/A変換に必要な面積が少なくなるという利点がある。しかし、D/A変換誤差があると、比較器12の入力端に望ましくないオフセット電圧が生じ得ることを意味する。
ラッチ19を使用する代わりに、比較器12の出力端を後続回路に直接結合してもよく、制御回路18は出力が正しいとき、それらの後続回路へ知らせる。しかしラッチ19を用いることにより、センサ回路中のレベル調整は、後続回路にとって完全にトランスペアレントになる。相対レベル検出状態におけるセンシング信号20と平均値(V1+V2)/2の比較の代わりに、もちろん、コンバイナ回路16を適切に変更することにより、任意の他の信号(W1*V1+W2*V2)/(W1+W2)との比較を実現することもできる。同様に追跡モードでは、コンバイナ回路16は、D/A変換回路14a、bのうちの一方のみの出力信号Va、Vbのそれぞれに依存した信号を供給する必要はない。たとえば、上方向追跡モードで信号A*Va+B*Vbが供給される場合は、第1のD/A変換回路14aは最終的に出力値Vaをとり、その結果Vmax=A*Va+B*Vbとなり、同様に下方向追跡モードで信号C*Va+D*Vbが供給される場合は、第2のD/A変換回路14bは最終的に出力値Vbをとり、その結果Vmin=C*Va+D*Vbとなる。相対レベル検出モードにおいてA*Va+B*VbとC*Va+D*Vbの平均値が供給される場合は、その平均値は依然として(Vmax+Vmin)/2(またはその他任意の重み付き平均値)に等しくなる。しかし、BまたはCが0でない場合は、Vbの変化が、Vmaxに用いられる値にもVminに用いられる値にも影響を与えることがあることを理解されたい。これは、VmaxとVminが同じままである場合、一定の安定条件(たとえば、A、B、C、およびDが正であれば、A>BおよびD>C)が満たされれば、問題にならない。VmaxとVminが変化する場合は、VmaxとVminの変化がフィルタリングされたものが得られる。
Claims (11)
- センシング信号用の出力端を有するセンサと、
第1および第2の比較器入力端を有し、前記センサの前記出力端が前記第1の比較器入力端に結合された比較器と、
上方向追跡モードから、下方向相対レベル検出モード、下方向追跡モード、上方向相対レベル検出モード、そして再び前記上方向追跡モードへと、センシング回路を次々に切り換えるように構成された制御回路と、
前記制御回路からディジタル制御信号を受け取るように結合されたディジタル・アナログ変換器とを含む、電子的センシング回路であって、前記制御回路は、前記ディジタル・アナログ変換器に、前記上方向および下方向追跡モードではそれぞれ第1および第2のディジタル制御信号値によって決まる第1および第2の出力信号を前記第2の比較器入力端に供給させ、相対レベル検出モードでは前記第1および第2の出力信号の平均値に対応する第3の出力信号を前記第2の比較器入力端に供給させるために、前記ディジタル・アナログ変換器に結合された第1の出力端を有し、
前記制御回路は、前記比較器の前記出力端に結合された入力端を有し、前記制御回路が、前記上方向追跡モードでは前記第1のディジタル制御信号値による、前記センシング信号の上方向変化に対する一方向性の上方向追跡を制御し、前記上方向追跡モードでは前記第2のディジタル制御信号値による、前記センシング信号の下方向変化に対する一方向性の下方向追跡を制御する、電子的センシング回路。 - 前記ディジタル・アナログ変換器が、
前記制御回路からそれぞれ前記第1および第2のディジタル制御信号値を受け取るように結合された、第1および第2のディジタル・アナログ変換回路と、
前記第1および第2のディジタル・アナログ変換回路の出力端に結合された入力端、および前記第2の比較器入力端に結合された出力端を有する制御可能コンバイナ回路とを含み、前記制御回路は、前記制御可能コンバイナ回路に、上方向および下方向追跡モードではそれぞれ第1および第2のディジタル・アナログ変換回路によって決まる第1および第2のコンバイナ出力信号を前記第2の比較器入力端へ供給させ、相対レベル検出モードでは前記第1および第2のコンバイナ出力信号の平均値に対応する第3のコンバイナ出力信号を前記第2の比較器入力端へ供給させるために、前記制御可能コンバイナ回路に結合された第1の出力端を有し、
前記制御回路は、上方向追跡モードでは前記第1のアナログ・ディジタル変換回路による、前記センシング信号の上方向変化に対する一方向性の上方向追跡を制御し、上方向追跡モードでは前記第2のアナログ・ディジタル変換回路による、前記センシング信号の下方向変化に対する一方向性の下方向追跡を制御する、請求項1に記載の電子的センシング回路。 - 前記上方向および下方向追跡モードへの切換え時点またはその前に、前記第1および第2のディジタル制御値を、それぞれ前の上方向および下方向追跡モード時にとられた値より低いおよび高いレベルにリセットするように、前記制御回路が構成された、請求項2に記載の電子的センシング回路。
- 前記センシング信号が最大値および/または最小値を通過したかどうかを検出するための検出回路を含み、
前記センシング信号が前記最大値および/または最小値をそれぞれ通過したことを前記検出回路が検出したとき、それぞれ前記上方向追跡モードから前記下方向相対レベル検出モードへの切換えおよび/または前記下方向追跡モードから前記上方向相対レベル検出モードへの切換えを制御するように前記制御回路が構成された、請求項2に記載の電子的センシング回路。 - 前記上方向および/または下方向追跡モードからの切換えを制御するために、前記センシング信号を、前記第1および第2のコンバイナ出力信号の平均値とそれぞれ前記第1および/またはコンバイナ出力信号の間にある閾値と比較するように、前記検出回路が構成された、請求項4に記載の電子的センシング回路。
- 前記上方向および/または下方向追跡モードからの切換えを制御するために、前記コンバイナ回路に、前記第2の比較器入力端への、それぞれ前記第1および/またはコンバイナ出力信号の供給と前記閾値の供給とを切り換えさせるように、前記制御回路が構成された、請求項5に記載の電子的センシング回路。
- 前記検出回路が、前記上方向および/または下方向追跡モードにおいて、所定長さの時間間隔の間に、前記比較器の出力端で遷移が生じなかったかどうかを検出するためのタイマ回路を含む、請求項4に記載の電子的センシング回路。
- 前記比較器の前記出力端に結合されたラッチ回路を含み、前記相対レベル検出モードでは前記ラッチ回路に前記比較器の前記出力信号を追従させ、前記追跡モードでは前記比較器の前記出力信号をラッチさせるために、前記制御回路が前記ラッチ回路の制御入力端に結合された出力端を有する、請求項2に記載の電子的センシング回路。
- 前記平均値が前記第1および第2のコンバイナ信号の重みを等しくした場合の平均値に相当するように、前記コンバイナ回路が前記平均値を生成する、請求項2に記載の電子的センシング回路。
- 前記第1および第2のディジタル・アナログ変換回路が、共通の分圧器構造を共有する、請求項2に記載の電子的センシング回路。
- 前記第1および第2のディジタル・アナログ変換回路が、前記制御回路の制御下で、前記共通分圧器構造の選択されたノードから前記コンバイナ回路へ電圧を渡すための1組のスイッチをそれぞれ備える、請求項2に記載の電子的センシング回路。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP03103471 | 2003-09-19 | ||
| PCT/IB2004/051723 WO2005029706A2 (en) | 2003-09-19 | 2004-09-09 | Electronic sensing circuit |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007506338A true JP2007506338A (ja) | 2007-03-15 |
Family
ID=34354547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006526772A Withdrawn JP2007506338A (ja) | 2003-09-19 | 2004-09-09 | 電子的センシング回路 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7301330B2 (ja) |
| EP (1) | EP1676097B1 (ja) |
| JP (1) | JP2007506338A (ja) |
| KR (1) | KR20060092214A (ja) |
| CN (1) | CN100565116C (ja) |
| AT (1) | ATE433096T1 (ja) |
| DE (1) | DE602004021405D1 (ja) |
| WO (1) | WO2005029706A2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009508383A (ja) | 2005-09-09 | 2009-02-26 | エヌエックスピー ビー ヴィ | 位相検出システム |
| US8791709B2 (en) * | 2010-12-20 | 2014-07-29 | Stmicroelectronics Asia Pacific Pte Ltd. | On-chip measurement of capacitance for micro-electro-mechanical system (MEMS) actuator circuit |
| DE102015011934A1 (de) * | 2015-09-13 | 2017-03-16 | Androtec Gmbh | Positionsempfindliche optoelektronische Detektoranordnung und Laserstrahlempfänger, der diese verwendet |
| DE102019219820A1 (de) * | 2019-12-17 | 2021-06-17 | Robert Bosch Gmbh | Verfahren, Computerprogramm, elektronisches Speichermedium und Vorrichtung zur Überwachung eines Sensorsystems. |
| CN111208450B (zh) * | 2020-01-20 | 2020-12-08 | 浙江大学 | 漏电保护器的基础漏电检测芯片 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3767938A (en) * | 1972-05-26 | 1973-10-23 | Ibm | Zero sense after peak detection circuit |
| GB8706905D0 (en) * | 1987-03-24 | 1987-04-29 | Schlumberger Electronics Uk | Shaft monitoring system |
| US4765342A (en) * | 1987-07-27 | 1988-08-23 | Trutek Research, Inc. | Timed drift compensation for rate volume monitor |
| US5043685A (en) * | 1990-09-28 | 1991-08-27 | Mts Systems Corporation | Threshold compensating detector for magnetostrictive transducer |
| US5198764A (en) * | 1991-02-22 | 1993-03-30 | Sentech Corp. | Position detector apparatus and method utilizing a transient voltage waveform processor |
| US5532583A (en) * | 1993-05-04 | 1996-07-02 | Storage Technology Corporation | System and method for calibrating a position sensing system |
| US5477142A (en) | 1994-02-22 | 1995-12-19 | Delco Electronics Corporation | Variable reluctance sensor interface using a differential input and digital adaptive control |
| US6242908B1 (en) | 1996-01-17 | 2001-06-05 | Allegro Microsystems, Inc. | Detection of passing magnetic articles while adapting the detection threshold |
| US6100680A (en) * | 1996-01-17 | 2000-08-08 | Allegro Microsystems, Inc. | Detecting the passing of magnetic articles using a transducer-signal detector having a switchable dual-mode threshold |
| DE19846461B4 (de) * | 1997-10-08 | 2006-05-11 | Hitachi, Ltd. | Sensoreinstellschaltung |
-
2004
- 2004-09-09 DE DE602004021405T patent/DE602004021405D1/de active Active
- 2004-09-09 CN CNB2004800268541A patent/CN100565116C/zh not_active Expired - Fee Related
- 2004-09-09 WO PCT/IB2004/051723 patent/WO2005029706A2/en active Application Filing
- 2004-09-09 KR KR1020067005401A patent/KR20060092214A/ko not_active Application Discontinuation
- 2004-09-09 US US10/572,106 patent/US7301330B2/en active Active
- 2004-09-09 AT AT04769971T patent/ATE433096T1/de not_active IP Right Cessation
- 2004-09-09 JP JP2006526772A patent/JP2007506338A/ja not_active Withdrawn
- 2004-09-09 EP EP04769971A patent/EP1676097B1/en not_active Not-in-force
Also Published As
| Publication number | Publication date |
|---|---|
| WO2005029706A3 (en) | 2005-06-30 |
| ATE433096T1 (de) | 2009-06-15 |
| EP1676097B1 (en) | 2009-06-03 |
| US20070059936A1 (en) | 2007-03-15 |
| CN100565116C (zh) | 2009-12-02 |
| EP1676097A2 (en) | 2006-07-05 |
| DE602004021405D1 (de) | 2009-07-16 |
| CN1853087A (zh) | 2006-10-25 |
| WO2005029706A2 (en) | 2005-03-31 |
| US7301330B2 (en) | 2007-11-27 |
| KR20060092214A (ko) | 2006-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6693419B2 (en) | Proximity detector | |
| US8441241B2 (en) | Methods and systems to digitally balance currents of a multi-phase voltage regulator | |
| US7199579B2 (en) | Proximity detector | |
| US6958639B2 (en) | Digital duty cycle correction circuit and method for multi-phase clock | |
| US20120319878A1 (en) | Analog-to-Digital Converter | |
| US20080211702A1 (en) | Comparator Chain Offset Reduction | |
| KR101811402B1 (ko) | 디지털 아날로그 변환부로 제어되는 전압제어 전류원을 이용한 주소형 화재감지장치 및 이를 포함하는 화재탐지 시스템 | |
| US11346873B2 (en) | Capacitance detection device | |
| JP2007506338A (ja) | 電子的センシング回路 | |
| JP5729254B2 (ja) | ヒシテリシス装置 | |
| US6188264B1 (en) | Automatic threshold level control circuit | |
| US20040189315A1 (en) | Current sense components failure detection in a multi-phase power system | |
| US10890548B2 (en) | Resistive gas sensor and gas sensing method therefor | |
| JP2000065869A (ja) | 単一入力ピンを使用したデュアル・スレショルド比較器回路 | |
| KR101916452B1 (ko) | 디지털 아날로그 변환부로 제어되는 전압제어 전류원을 이용한 주소형 화재감지장치 | |
| KR102543232B1 (ko) | 아날로그 디지털 변환기 및 아날로그 디지털 변환기의 동작 방법 | |
| US20220276286A1 (en) | Voltage hold circuit, voltage monitoring circuit, and semiconductor integrated circuit | |
| GB2229594A (en) | Current-to-frequency converter | |
| JP2009038433A (ja) | Ad変換回路 | |
| KR100283658B1 (ko) | 온도검출 보상회로 및 보상방법 | |
| JPH01254823A (ja) | ディジタル温度検知装置 | |
| RU2024195C1 (ru) | Преобразователь напряжения в частоту | |
| TWI448872B (zh) | 電流供應系統、使用此電流供應系統的類比數位轉換器以及電流供應方法 | |
| JPH04268830A (ja) | 同一レベル検出回路 | |
| JPH09186526A (ja) | 検波回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070907 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20080619 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20091007 |