JP2007284013A - 車両位置測位装置及び車両位置測位方法 - Google Patents
車両位置測位装置及び車両位置測位方法 Download PDFInfo
- Publication number
- JP2007284013A JP2007284013A JP2006116677A JP2006116677A JP2007284013A JP 2007284013 A JP2007284013 A JP 2007284013A JP 2006116677 A JP2006116677 A JP 2006116677A JP 2006116677 A JP2006116677 A JP 2006116677A JP 2007284013 A JP2007284013 A JP 2007284013A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- track
- gps
- vehicle speed
- navigation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Traffic Control Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
【解決手段】 GPS衛星から観測データを受信するGPS受信機と、前記車両の車両速度を検出する車速検出器と、前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースと、前記観測データと、前記車両速度と、前記線路データベースの中から抽出した自らの位置に最も近い前記位置座標に対応した前記軌道方向とを入力し、前記車両速度と前記軌道方向とを用いた慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補完して前記車両の位置を演算する演算部とを備えたようにした。
【選択図】 図1
Description
また運行管理センタにおける鉄道車両運行管理では、模式図的なデフォルメ地図を用いているので、それとは別の国土地理院による精密日本地図上に描かれた踏切やポイント等の施設との位置関係が正確には判らない。
特に分岐を含む複数の線路が平行する部分において、車両が正確にどの線路(レール)を走行しているかを知りたい場合には、遥かに精度のよい車両位置の把握が要求される。また更に、現行の中央運行管理システムは上記の精密日本地図上に描かれていず、独自の線路表示を用いているので、日本地図と対応させた表示が出来ない。
従来、走行中の車両の位置検出精度を上げる改良方式として、線路近傍に複数の地上マーカを設置してこれらを緯度、経度と関連付けて記憶させ、またGPS(Global Positioning System)衛星からのGPS信号を受信して測位演算を行うGPS航法により、車両の位置を確定する方式が知られている(例えば、特許文献1参照)。
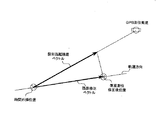
また、これらの複合航法として、INS航法とGPSから得られるそれぞれの位置情報を入力し、入力の時間的な差分をもとに補正用の誤差推定値や状態推定値を演算して出力するカルマンフィルタを用いて、この出力をINS航法に入力する構成も知られている。
以下、本発明の実施の形態について説明する。
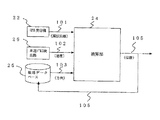
図1は、この実施の形態における車両位置測位装置の構成を示す図である。図において、線路(軌道ともいう)上を走行する鉄道車両10に搭載される位置測位装置は、GPSアンテナ21と、GPSアンテナからのGPS観測情報を受けるGPS受信機22と、設置されている線路上で所定の間隔で設けられたポイントにおける緯度や経度等の位置座標と、その位置座標における線路の方角とを対応させて記憶する線路データベース25と、鉄道車両10の速度を計算する車速パルス検出器26と、車速パルス検出器26とGPS受信機22からの情報を入力し線路データベース25を参照して鉄道車両位置を演算する演算部24と、鉄道車両の運行状況を管理する中央センターとの間で鉄道車両位置などの情報を送受する通信部23とを備える。
また、演算部24は、慣性航法(INS航法)による位置演算とGPS航法による位置演算とを併用して複合処理して位置演算結果105を出力する処理を行う演算処理部である。
通信部23は位置演算結果105を、鉄道車両の運行状況を管理する中央センター(図示せず)に出力する。
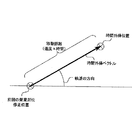
線路データベース25には、そのポイントごとに、ポイントの例えば緯度、経度の位置データと、ポイントPにおける線路の方角のデータが格納されている。線路の方角のデータとは、所定の基準方向に対して線路上の鉄道車両が進行する方角であり、例えば方位角で示されるデータである。この位置データおよび線路の方角は、例えば線路の地図データから求めたものであり、または、実際に線路上を走行して測定により得たデータである。
演算部24は、GPS受信機22から観測データ101を定期的に入力する。
演算部24は、車速パルス検出器26から鉄道車両の車速データ102を定期的に入力する。
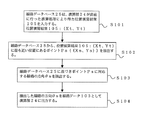
図4のフローチャートで、S101において線路データベース25は、演算部24が直前に行った演算処理により得た位置演算結果105(位置座標(Xt、Yt))を入力する。
S102において、演算部24は線路データベース25に格納された線路データ103のポイント位置(Xn、Yn)と位置演算結果105((Xt、Yt))とを比較し、線路データ103の中から位置演算結果105((Xt、Yt))に最も近い位置にあるポイントPs((Xs、Ys))を抽出する。
S103において、演算部24は線路データベース25に基づきポイントPsに対応する、ポイントPsでの線路の方角θsを抽出する。
S104において、抽出した線路の方角θsを線路データ103として演算部24に出力する。
演算部24は、例えば、これらのGPS/INS複合航法のアルゴリズムにより、現在位置を演算する。
本発明では線路データベース25を設け、この線路データベース25から角度(方向)に関する情報を取得するようにした。鉄道車両は道路を走行する車とは異なり必ず線路(軌道)上を走行することから、線路情報を利用することで現在の鉄道車両位置から鉄道車両の方向の情報を入手することができる。このように、線路上を走行する鉄道車両においては、鉄道車両が進行している角度(方向)に関する情報をジャイロ等の角度(方向)検出装置を用いる必要なく線路の情報から取得することが可能となる。
これにより、線路上を走行する鉄道車両などの鉄道車両の位置を、ジャイロなどの角度検出装置を用いる必要なく、安価に精度よく測位することができる。
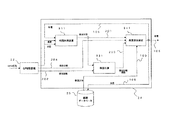
実施の形態2では、慣性航法とGPS航法とを併用して位置演算結果105を出力する別の実施例について説明する。実施の形態1で示した構成と同一あるいは相当する構成については同一の符号を付し、その説明を省略する。
以下、この発明の一実施の形態を図によって説明する。
以下、この発明の一実施の形態を図によって説明する。
以下、この発明の一実施の形態を説明する。実施の形態1〜4で示した構成と同一あるいは相当する構成については同一の符号を付し、その説明を省略する。
Claims (3)
- 軌道上を走行する車両に搭載され前記車両の位置を測位する車両位置測位装置であって、
GPS(Global Positioning System)衛星から観測データを受信するGPS受信機と、
前記車両の車両速度を検出する車速検出器と、
前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースと、
前記観測データと、前記車両速度と、前記線路データベースの中から抽出した自らの位置に最も近い前記位置座標に対応した前記軌道の方角とを入力し、前記車両速度と前記軌道方向とを用いた慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補正して前記車両の位置を演算する演算部とを備えた車両位置測位装置。 - 前記演算部は、前記GPS衛星から送信される擬似距離情報と前記車速検出器から出力される車速度情報を利用して、GPS航法と慣性航法の両航法の演算誤差を推定するカルマンフィルタを備えたことを特徴とする請求項1記載の車両位置測位装置。
- 軌道上を走行する車両の位置を測位する車両位置測位方法であって、
GPS(Global Positioning System)衛星から観測データを受信するステップと、
前記車両の車両速度を検出するステップと、
前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースから自らの位置に最も近い前記位置座標に対応した前記軌道方向を抽出するステップと、
前記車両速度と前記軌道方向とを用いて慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補完して前記車両の位置を演算するステップとを備えた車両位置測位方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006116677A JP2007284013A (ja) | 2006-04-20 | 2006-04-20 | 車両位置測位装置及び車両位置測位方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006116677A JP2007284013A (ja) | 2006-04-20 | 2006-04-20 | 車両位置測位装置及び車両位置測位方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007284013A true JP2007284013A (ja) | 2007-11-01 |
Family
ID=38756174
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006116677A Pending JP2007284013A (ja) | 2006-04-20 | 2006-04-20 | 車両位置測位装置及び車両位置測位方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007284013A (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4786001B1 (ja) * | 2010-12-07 | 2011-10-05 | 三菱電機株式会社 | 列車保安装置および列車位置決定方法 |
| JP2012171563A (ja) * | 2011-02-24 | 2012-09-10 | Hitachi Zosen Corp | 鉄道車両の位置検出装置および位置検出方法 |
| JP2012200030A (ja) * | 2011-03-18 | 2012-10-18 | Toshiba Corp | 列車重量算出システム |
| CN103395435A (zh) * | 2013-08-21 | 2013-11-20 | 重庆大学 | 一种高精度高速列车实时定位系统方法 |
| WO2015022591A1 (en) * | 2013-08-14 | 2015-02-19 | Thales Canada Inc. | Vehicle-based positioning system and method of using the same |
| JP2016194497A (ja) * | 2015-04-02 | 2016-11-17 | 株式会社京三製作所 | 位置検出装置 |
| WO2018221541A1 (ja) * | 2017-06-01 | 2018-12-06 | 株式会社京三製作所 | 位置検出装置及び位置検出システム |
| JP2021160468A (ja) * | 2020-03-31 | 2021-10-11 | 日本信号株式会社 | 車両位置検知装置 |
| US20220043162A1 (en) * | 2020-08-04 | 2022-02-10 | Samsung Electronics Co., Ltd. | Method of and apparatus for updating position of moving object based on gnss |
| JP2022181387A (ja) * | 2021-05-26 | 2022-12-08 | 日本製鉄株式会社 | 情報処理システム、情報処理装置、情報生成方法及びプログラム |
| KR102684938B1 (ko) * | 2023-05-31 | 2024-07-15 | 회명정보통신(주) | 고속철도용 통신방식 자동 전환방법 |
| KR102684937B1 (ko) * | 2023-05-31 | 2024-07-15 | 회명정보통신(주) | 고속철도용 무선통신 자동 설정 및 전환방법 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09272438A (ja) * | 1996-04-05 | 1997-10-21 | Nippon Signal Co Ltd:The | 列車制御装置 |
| JP2003267220A (ja) * | 2002-03-13 | 2003-09-25 | Railway Technical Res Inst | 移動体自己位置検出方法、及び移動体自己位置検出システム |
| JP2004231100A (ja) * | 2003-01-31 | 2004-08-19 | Nippon Sharyo Seizo Kaisha Ltd | 軌道走行車両の位置検知システム |
| JP2004271255A (ja) * | 2003-03-06 | 2004-09-30 | Railway Technical Res Inst | 列車自車位置検出方法、及び列車自車位置検出システム |
| JP2005186651A (ja) * | 2003-12-24 | 2005-07-14 | Hokkaido Railway Co | 車両位置算出装置、鉄道車両、地上設備及び車両位置表示装置 |
| JP2005195395A (ja) * | 2004-01-05 | 2005-07-21 | Mitsubishi Electric Corp | 移動体加速度・距離推定回路、測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法 |
| JP2006001349A (ja) * | 2004-06-16 | 2006-01-05 | Hitachi Ltd | 列車位置検知システム |
| JP2007522471A (ja) * | 2004-02-13 | 2007-08-09 | ソニー エリクソン モバイル コミュニケーションズ, エービー | 移動体端末及び加速度情報に基づき位置を決定するための方法 |
-
2006
- 2006-04-20 JP JP2006116677A patent/JP2007284013A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09272438A (ja) * | 1996-04-05 | 1997-10-21 | Nippon Signal Co Ltd:The | 列車制御装置 |
| JP2003267220A (ja) * | 2002-03-13 | 2003-09-25 | Railway Technical Res Inst | 移動体自己位置検出方法、及び移動体自己位置検出システム |
| JP2004231100A (ja) * | 2003-01-31 | 2004-08-19 | Nippon Sharyo Seizo Kaisha Ltd | 軌道走行車両の位置検知システム |
| JP2004271255A (ja) * | 2003-03-06 | 2004-09-30 | Railway Technical Res Inst | 列車自車位置検出方法、及び列車自車位置検出システム |
| JP2005186651A (ja) * | 2003-12-24 | 2005-07-14 | Hokkaido Railway Co | 車両位置算出装置、鉄道車両、地上設備及び車両位置表示装置 |
| JP2005195395A (ja) * | 2004-01-05 | 2005-07-21 | Mitsubishi Electric Corp | 移動体加速度・距離推定回路、測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法 |
| JP2007522471A (ja) * | 2004-02-13 | 2007-08-09 | ソニー エリクソン モバイル コミュニケーションズ, エービー | 移動体端末及び加速度情報に基づき位置を決定するための方法 |
| JP2006001349A (ja) * | 2004-06-16 | 2006-01-05 | Hitachi Ltd | 列車位置検知システム |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4786001B1 (ja) * | 2010-12-07 | 2011-10-05 | 三菱電機株式会社 | 列車保安装置および列車位置決定方法 |
| WO2012077184A1 (ja) * | 2010-12-07 | 2012-06-14 | 三菱電機株式会社 | 列車保安装置および列車位置決定方法 |
| US9266543B2 (en) | 2010-12-07 | 2016-02-23 | Mitsubishi Electric Corporation | Train protection device and train position decision method |
| JP2012171563A (ja) * | 2011-02-24 | 2012-09-10 | Hitachi Zosen Corp | 鉄道車両の位置検出装置および位置検出方法 |
| JP2012200030A (ja) * | 2011-03-18 | 2012-10-18 | Toshiba Corp | 列車重量算出システム |
| WO2015022591A1 (en) * | 2013-08-14 | 2015-02-19 | Thales Canada Inc. | Vehicle-based positioning system and method of using the same |
| CN103395435A (zh) * | 2013-08-21 | 2013-11-20 | 重庆大学 | 一种高精度高速列车实时定位系统方法 |
| JP2016194497A (ja) * | 2015-04-02 | 2016-11-17 | 株式会社京三製作所 | 位置検出装置 |
| WO2018221541A1 (ja) * | 2017-06-01 | 2018-12-06 | 株式会社京三製作所 | 位置検出装置及び位置検出システム |
| JP2018205048A (ja) * | 2017-06-01 | 2018-12-27 | 株式会社京三製作所 | 位置検出装置及び位置検出システム |
| JP2021160468A (ja) * | 2020-03-31 | 2021-10-11 | 日本信号株式会社 | 車両位置検知装置 |
| JP7410779B2 (ja) | 2020-03-31 | 2024-01-10 | 日本信号株式会社 | 車両位置検知装置 |
| US20220043162A1 (en) * | 2020-08-04 | 2022-02-10 | Samsung Electronics Co., Ltd. | Method of and apparatus for updating position of moving object based on gnss |
| US11782169B2 (en) * | 2020-08-04 | 2023-10-10 | Samsung Electronics Co., Ltd. | Method of and apparatus for updating position of moving object based on GNSS |
| JP2022181387A (ja) * | 2021-05-26 | 2022-12-08 | 日本製鉄株式会社 | 情報処理システム、情報処理装置、情報生成方法及びプログラム |
| JP7660435B2 (ja) | 2021-05-26 | 2025-04-11 | 日本製鉄株式会社 | 情報処理システム、情報処理装置、情報生成方法及びプログラム |
| KR102684938B1 (ko) * | 2023-05-31 | 2024-07-15 | 회명정보통신(주) | 고속철도용 통신방식 자동 전환방법 |
| KR102684937B1 (ko) * | 2023-05-31 | 2024-07-15 | 회명정보통신(주) | 고속철도용 무선통신 자동 설정 및 전환방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111337953B (zh) | 卫星导航欺骗检测方法、装置、设备及介质 | |
| Jiang et al. | A multi-sensor positioning method-based train localization system for low density line | |
| JP3243236B2 (ja) | 位置データ間引き装置 | |
| CN107247275B (zh) | 基于公交车的城市gnss脆弱性监测系统及其方法 | |
| JP4090852B2 (ja) | Gps測位による列車走行情報検出装置及びその列車走行情報検出方法 | |
| JPWO2014002211A1 (ja) | 測位装置 | |
| CN109471144A (zh) | 基于伪距/伪距率的多传感器紧组合列车组合定位方法 | |
| JP4426874B2 (ja) | 列車位置検出管理用の運行サーバ及び列車位置検出管理用の車載機器 | |
| JP2003294825A (ja) | 列車自車位置検出方法、及び列車自車位置検出システム | |
| CN101498583A (zh) | 一种汽车导航装置及其定位方法 | |
| JP2010234979A (ja) | 鉄道車両の運転保安システムにおける位置検出装置およびその位置検出方法 | |
| US12405385B1 (en) | Global positioning system time verification for autonomous vehicles | |
| US12202531B2 (en) | Method for calculating an instantaneous velocity vector of a rail vehicle and corresponding system | |
| AU2006201543B2 (en) | System and method for establishing the instantaneous speed of an object | |
| JP2007284013A (ja) | 車両位置測位装置及び車両位置測位方法 | |
| Liu et al. | Robust train localisation method based on advanced map matching measurement-augmented tightly-coupled GNSS/INS with error-state UKF | |
| Heirich et al. | Measurement methods for train localization with onboard sensors | |
| CN108254775A (zh) | 车载导航系统及其实现方法 | |
| JP3267080B2 (ja) | ハイブリッドナビゲーションシステム | |
| KR100308572B1 (ko) | 자이로와 가속도계를 이용한 경사각 및 차량속도 검출장치 | |
| CN116908893A (zh) | 一种基于多源融合的列车定位系统及方法 | |
| JP2006119144A (ja) | 道路線形自動測量装置 | |
| JP3898967B2 (ja) | 移動体自己位置検出方法、及び移動体自己位置検出システム | |
| CN120595342B (zh) | 基于北斗定位的铁路站场定位系统及方法 | |
| RU2638358C2 (ru) | Способ повышения точности местоопределения наземного подвижного объекта и устройство для его реализации |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100817 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110405 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111004 |