JP2007236520A - 電気掃除機 - Google Patents
電気掃除機 Download PDFInfo
- Publication number
- JP2007236520A JP2007236520A JP2006060862A JP2006060862A JP2007236520A JP 2007236520 A JP2007236520 A JP 2007236520A JP 2006060862 A JP2006060862 A JP 2006060862A JP 2006060862 A JP2006060862 A JP 2006060862A JP 2007236520 A JP2007236520 A JP 2007236520A
- Authority
- JP
- Japan
- Prior art keywords
- vacuum cleaner
- dust
- container
- dust collecting
- collecting container
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Abstract
【課題】慣性分離によって分離された塵埃を捕集する集塵容器の非装着及び誤装着を確実に防止すると共に、この集塵容器の装着状態を容易に認識することができる電気掃除機を提供すること。
【解決手段】電動送風機16を内蔵した掃除機本体11と、この掃除機本体11に着脱自在に装着されると共に電動送風機16の吸込負圧による慣性分離で分離された塵埃を捕集する集塵容器30と、掃除機本体11に手元操作管30を介して着脱自在に接続されると共に集塵容器30に連通する吸込口体20とを備えた電気掃除機10であって、掃除機本体11は、集塵容器30の非装着又は誤装着を検知する第一マイクロスイッチ(容器検知手段)M1を有し、吸込口体20は、第一マイクロスイッチM1の検知結果を報知する報知ランプ(報知手段)24を有している。
【選択図】 図1
【解決手段】電動送風機16を内蔵した掃除機本体11と、この掃除機本体11に着脱自在に装着されると共に電動送風機16の吸込負圧による慣性分離で分離された塵埃を捕集する集塵容器30と、掃除機本体11に手元操作管30を介して着脱自在に接続されると共に集塵容器30に連通する吸込口体20とを備えた電気掃除機10であって、掃除機本体11は、集塵容器30の非装着又は誤装着を検知する第一マイクロスイッチ(容器検知手段)M1を有し、吸込口体20は、第一マイクロスイッチM1の検知結果を報知する報知ランプ(報知手段)24を有している。
【選択図】 図1
Description
本発明は、慣性分離によって分離された塵埃を捕集する集塵容器が着脱自在に装着される掃除機本体に、着脱自在に接続される吸込口体を備えた電気掃除機に関するものである。
従来から、電動送風機の吸引側に着脱自在に配置された集塵用の紙パックの有無を検出する検出手段と、この検知手段からの信号に基づいて警報を表示又は音声により報知する報知手段とを備えた電気掃除機が知られている(例えば、特許文献1参照)。
この電気掃除機では、手元操作管に設けられたリモート部のモードスイッチを点滅させると共に、ブザーを鳴らすことで紙パックの装着忘れを報知するようになっている。
特開平4−73035号公報
ところで、慣性分離によって分離された塵埃を捕集する集塵容器は、透明や半透明な材質で形成されることが多く、特に所定の位置に装着されていない誤装着状態が分かりにくくなっているが、上述の電気掃除機では、この慣性分離で分離された塵埃を捕集する集塵容器の有無を検知することができないという問題が生じていた。
特に、慣性分離によって塵埃を分離する電気掃除機では、集塵容器の着脱を行う際に集塵ホースを掃除機本体に接続したまま行うことが可能であり、集塵容器を装着していない状態で掃除を行なってしまうおそれがあった。
そのため、この慣性分離によって塵埃を分離する電気掃除機では、集塵容器が所定位置に正確に装着されていないにもかかわらず電動送風機を駆動させてしまい、十分な掃除を行なうことができない上に、分離された塵埃を捕集することができないおそれが生じていた。
さらに、掃除を行なう場合には被清掃面を見ながら行うことが一般的であり、手元操作管に設けられたモードスイッチを点滅させるだけでは、容易に検知結果を認識することができないという問題も生じていた。
そこで、この発明は、慣性分離によって分離された塵埃を捕集する集塵容器の非装着及び誤装着を確実に防止すると共に、この集塵容器の装着状態を容易に認識することができる電気掃除機を提供することを目的としている。
上記課題を解決するために、この発明は、電動送風機を内蔵した掃除機本体と、この掃除機本体に着脱自在に装着されると共に前記電動送風機の吸込負圧による慣性分離で分離された塵埃を捕集する集塵容器と、前記掃除機本体に手元操作管を介して着脱自在に接続されると共に前記集塵容器に連通する吸込口体とを備えた電気掃除機であって、前記掃除機本体は、前記集塵容器の非装着又は誤装着を検知する容器検知手段を有し、前記吸込口体は、前記容器検知手段の検知結果を報知する報知手段を有していることを特徴としている。
本発明の電気掃除機によれば、容器検知手段により慣性分離によって分離された塵埃を捕集する集塵容器の非装着及び誤装着を確実に防止することができる。
また、被清掃面上で塵埃を吸い込む吸込口体が報知手段を有しているので、報知手段を目視確認しやすく、容易に容器検知手段の検知結果を認識することができる。
以下、この発明に係る電気掃除機を実施するための最良の形態を図面に基づいて説明する。
図1に示す電気掃除機10は、掃除機本体11と、この掃除機本体11の前端部に設けたホース接続口11aに一端が着脱可能に接続された集塵ホース12と、この集塵ホース12の他端に設けた手元操作管13に着脱自在に接続された延長管14と、この延長管14の先端部に着脱自在に接続された吸込口体20とを備えている。
掃除機本体11の内部には、図2に示すように、前側に集塵室15が形成され、後側にこの集塵室15に負圧を作用させる電動送風機16が配置された電動機室(図示せず)が形成され、この電動機室の上方に制御回路Sが配置されている。
また、この掃除機本体11の上面には、後部がヒンジ結合されて上下方向に回動する蓋体17が設けられ、この蓋体17によって集塵室15が開閉されるようになっている。
さらに、この集塵室15と電動機室(図示せず)とは、隔壁18によって区画されている。
また、手元操作管13には操作部13Aが設けられており、操作部13Aには電動送風機16の強弱を設定する強、弱スイッチSa,Sb及びオフスイッチSc等とが設けられている。なお、この操作部13Aからのスイッチ信号は、制御回路Sに入力されるようになっている。
集塵室15は、図2に示すように、上方に開放すると共に、底面15aに後述する第一マイクロスイッチM1が設けられている。そして、この集塵室15には、集塵容器30が着脱自在に装着されている。
集塵容器30は、図2及び図3に示すように、容器本体31と、この容器本体31の後面に着脱自在に取り付けられたフィルタ体32とを有している。
容器本体31は、集塵室部33と風路室部34とを有しており、この集塵室部33と風路室部34とはメッシュフィルタMFによって連通区画されている。
また、集塵室部33は、底面が蓋部35によって開閉可能になっていると共に、集塵室15内に装着された際にホース接続口11aに連通する連通口33aと、この連通口33aに対向した分離壁33bとを備えている。なお、この連通口33a及び分離壁33bは、集塵室部33の上部に設けられ、メッシュフィルタMFよりも上方に位置している。
風路室部34は、後部が隔壁18に向かって開放しており、この後部がフィルタ体32によって塞がれている。
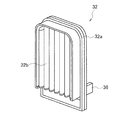
フィルタ体32は、図4に示すように、枠体32aと、この枠体32aの内側に取り付けられた蛇腹状のプリーツフィルタ32bとを有している。また、枠体32aには、後述する第二マイクロスイッチM2を押圧する押圧片36が後方に向かって突出形成されている。
なお、このフィルタ体32の後面には、プリーツフィルタ32bに付着した塵埃を除去するための振動レバー32c(図2参照)が設けられており、フィルタ体32を着脱する際には、この振動レバー32cをつまんで行う。
隔壁18は、図3に示すように、格子状に仕切られて多数の連通孔18aが形成された格子部18bと、この格子部18bの下側に設けられたスイッチ保持部18cとを有している。
スイッチ保持部18cは、隔壁18に形成された穴部18dの周縁部から集塵室15側に突出形成されたカップ形状を呈しており、内部に第二マイクロスイッチM2が配置されている。
第一マイクロスイッチM1は、集塵容器30の非装着又は誤装着を検知する容器検知手段であり、スイッチ片M1aと、このスイッチ片M1aのON/OFFを検知する検知部M1bとを有している。
この第一マイクロスイッチM1は、集塵室15の底面15aのほぼ中央に配設されており、この集塵室15内に集塵容器30が装着されることによってスイッチ片M1aが押圧されるようになっている。検知部M1bは、スイッチ片M1aが押圧されている間、このスイッチ片M1aのONを検知する。
また、第二マイクロスイッチM2は、フィルタ体32の非装着を検知するフィルタ検知手段であり、スイッチ片M2aと、このスイッチ片M2aのON/OFFを検知する検知部M2bとを有している。
この第二マイクロスイッチM2は、スイッチ保持部18c内に配設されており、フィルタ体32が取り付けられた容器本体31が集塵室15内に装着されると、フィルタ体32の押圧片36によってスイッチ片M2aが押圧されるようになっている。検知部M2bは、スイッチ片M2aが押圧されている間、このスイッチ片M2aのONを検知する。
そして、各第一、第二マイクロスイッチM1、M2は、図示しないハーネスを介してそれぞれ制御回路Sに電気的に接続され、この第一、第二マイクロスイッチM1、M2からのON信号が制御回路Sに入力されるようになっている。
制御回路Sは、操作部13Aからのスイッチ信号に基づいて電動送風機16の運転制御を行うと共に、第一、第二マイクロスイッチM1、M2からのON信号に基づいて吸込口体20に設けられた後述する報知ランプ24、25を点滅制御するものである。
ここで、この制御回路Sは、第一マイクロスイッチM1からON信号が入力されると報知ランプ24を消灯し、第一マイクロスイッチM1からON信号が入力されないと報知ランプ24を点灯する。また、この制御回路Sは、第二マイクロスイッチM2からON信号が入力されると報知ランプ25を消灯し、第二マイクロスイッチM2からON信号が入力されないと報知ランプ25を点灯する。
一方、吸込口体20は、図5(a)に示すように、吸込口本体21と、この吸込口本体21の前面及び両側面に設けられたバンパー22と、吸込口21の後部に回転可能且つ前後に起倒可能に設けられた接続管23とを備えている。
吸込口本体21は、接続管23に連通する図示しない吸込室が内部に形成されており、この吸込室には、集塵室15、集塵ホース12、手元操作管13、延長管14及び接続管23を順に介して、電動送風機16の吸込負圧が作用するようになっている。
また、この吸込室内には、回転清掃体(図示せず)が回転自在に配置されると共に、この回転清掃体の上方に位置する駆動ファン(図示せず)が回転自在に配置されている。
さらに、吸込口本体21の上面には、多数の空気取入開口21aと、第一、第二報知ランプ24、25とが設けられている。なお、この空気取入開口21aと、第一、第二報知ランプ24、25とは、それぞれ接続管23を挟んで互いに反対側に位置している。また、この空気取入開口21a及び第一、第二報知ランプ24、25が設けられた配置面21bは、図5(b)に示すように、後方(接続管23の延長方向)に向かって次第に低くなるように傾斜しており、この配置面21bが後方を向くようになっている。
そして、吸込口本体21の吸込室に吸込負圧が作用すると、この吸込負圧によって吸込口本体21の図示しない底面に形成された吸込開口から、被清掃面上の塵埃が吸い込まれると共に、上面に形成された多数の空気取入開口21aから空気が吸い込まれる。そして、この空気取入開口21aからの空気により、内部に設けられた図示しない駆動ファンが回転し、この回転に伴って回転清掃体が回動するようになっている。
第一報知ランプ24は、第一マイクロスイッチM1の検知結果を報知する報知手段であり、図示しない信号線を介して制御回路Sに電気的に接続され、制御回路Sからの点灯信号が入力されるようになっている。
また、第二報知ランプ25は、第二マイクロスイッチM2の検知結果を報知する報知手段であり、図示しない信号線を介して制御回路Sに電気的に接続され、制御回路Sからの点灯信号が入力されるようになっている。
ここで、図示しない信号線は、集塵ホース12、手元操作管13、延長管14、及び接続管23内に設けられ、この集塵ホース12等が接続されることにより電気的に連続するようになっている。
そして、第一報知ランプ24は、図5(b)に示すように、配置面21bに形成された凹部24a内に設けられたLED24bと、この凹部24aを覆う透光材24cとを有している。
なお、第二報知ランプ25も、図示しないが凹部内に設けられたLEDと、凹部を覆う透光材とを有している。
これらの第一、第二報知ランプ24、25は、制御回路Sから点灯信号が入力されると、LED24b、(他方図示せず)を発光させると共に、透光材24c、(他方図示せず)によって光を拡散するようになっている。
次に、上記のように構成される電気掃除機10の動作について説明する。
この電気掃除機10の集塵容器30に塵埃が溜まったら、掃除機本体11に設けられた蓋体17を上方に回動させて集塵室15を開け、集塵容器30を集塵室15から取り出す。
そして、蓋部35を図示しない開閉手段を操作して開き、集塵室部33内に蓄積された塵埃を廃棄する。なお、このとき、メッシュフィルタMFに付着した塵埃を掻き出してもよい。
さらに、フィルタ体32に付着した塵埃を除去するには、まずフィルタ体32の後面に設けられた振動レバー32cをつまみ、風路室部34の後部に嵌着されたフィルタ体32を取り外す。
次に、振動レバー32cを左右方向に移動させてプリーツフィルタ32bを振動させ、このプリーツフィルタ32bに付着した塵埃を除去する。
このようにプリーツフィルタ32bの塵埃を除去したら、再び振動レバー32cをつまんでフィルタ体32を風路室部34の後部に嵌着する。また、集塵室部33の蓋部35は、あらかじめ閉じておく。
そして、フィルタ体32を取り付けた容器本体31を、集塵室15内に挿入し、集塵容器30を掃除機本体11に装着する。
このとき、図6(a)に示すように、蓋部35が集塵室15の底面15aに向かってまっすぐ降下していき、集塵容器30が集塵室15の所定の位置に正確に装着されると、図6(b)に示すように、第一マイクロスイッチM1が蓋部35によって押圧される。これにより、検知部M1bはスイッチ片M1aのONを検知し、制御回路Sには第一マイクロスイッチM1からのON信号が入力される。
一方、フィルタ体32は隔壁18に沿って降下し、このとき図6(c)に示すように、フィルタ体32の枠体32aに設けられた押圧片36が隔壁18に摺接しながら移動する。
そして、集塵容器30が集塵室15の所定の位置に正確に装着されると、図6(d)に示すように、第二マイクロスイッチM2が押圧片36によって押圧される。これにより、検知部M2bはスイッチ片M2aのONを検知し、制御回路Sには第二マイクロスイッチM2からのON信号が入力される。
このように集塵容器30を装着したら、蓋体17を下方に回動して閉じてから手元操作管13の操作部13Aに設けられた強スイッチSa又は弱スイッチSbをONする。
このとき、制御回路Sには第一、第二マイクロスイッチM1、M2からのON信号がそれぞれ入力されているので、この制御回路Sから点灯信号が出力されず、報知ランプ24、25は消灯したままとなる。
そして、電動送風機16は、操作部13Aからのスイッチ信号に応じた運転を行い、これにより吸込負圧が集塵室15、集塵ホース12、手元操作管13、延長管14を順に介して吸込口体20から塵埃を吸い込んで掃除をすることができる。
なお、吸込口体20から吸い込まれた塵埃を含む空気は、延長管14、手元操作管13、集塵ホース12を順に介して、集塵室15内の集塵容器30内に吸い込まれる。
ここで、集塵容器30の連通口33aから集塵室部33内に流れ込んだ空気及び塵埃は、慣性力によってほぼまっすぐ流れて分離壁33bにぶつかる。これにより、塵埃が下方に落下して蓄積されると共に、空気はメッシュフィルタMFを介して風路室部34へと流れる。そして、空気は隔壁18の連通孔18aを通って電動送風機16に吸い込まれ、図示しない排気口から大気へと排気される。
このように、集塵容器30では、慣性分離によって空気と塵埃とが分離されるようになっている。
一方、この集塵容器30が装着されていない場合では、第一、第二マイクロスイッチM1、M2はそれぞれONされず、検知部M1b、M2bがスイッチ片M1a、M2aのONを検知することはない。
そのため、制御回路Sには、第一、第二マイクロスイッチM1、M2のいずれからもON信号が入力されないので、この制御回路Sは、報知ランプ24、25のそれぞれに点灯信号を出力し、報知ランプ24、25を点灯させる。
これにより、集塵容器30の非装着及びフィルタ体32の非装着を容易に把握することができ、誤って掃除をしてしまうことを防止できる。
さらに、フィルタ体32が容器本体31に装着されていない場合では、集塵容器30の蓋部35によって押圧される第一マイクロスイッチM1はONされるが、第二マイクロスイッチM2はONされず、検知部M2bはスイッチ片M2aのONを検知しない。
これにより、制御回路Sには第一マイクロスイッチM1からのみON信号が入力されるので、この制御回路Sは報知ランプ25のみに点灯信号を出力し、報知ランプ25だけが点灯する。
このように、フィルタ体32の非装着を検知して報知することができるので、フィルタ体32の装着忘れを防止し、電動送風機16に細塵が吸い込まれることを確実に防止することができる。
そして、集塵容器30が所定の位置に正確に装着されていない場合、つまり誤装着の場合では、蓋部35が集塵室15の底面15aに向かってまっすぐ降下せず、第一マイクロスイッチM1を十分に押圧することができない。
このため、検知部M1bはスイッチ片M1aのONを検知せず、制御回路Sには第一マイクロスイッチM1からのON信号が入力されない。なお、このとき第二マイクロスイッチM2も十分に押圧されず、この第二マイクロスイッチM2からのON信号も入力されない。
これにより、制御回路Sは報知ランプ24、25に点灯信号を出力し、報知ランプ24、25が点灯する。
このように、集塵容器30の誤装着を検知して報知することができるので、集塵室15内に集塵容器30が所定の位置に正確に装着されていないことを容易に把握することができ、誤って掃除してしまうことを防止できる。
さらに、この電気掃除機10では、吸込口体20に報知ランプ24、25が設けられているので、報知ランプ24、25を目視確認しやすく、容易に第一、第二マイクロスイッチM1、M2の検知結果を認識することができる。
これにより、集塵容器30の非装着又は誤装着やフィルタ体32の非装着を確実に把握して、誤って掃除をしてしまうことを防止できる。
特に、上述の実施の形態の電気掃除機10では、容器検知手段である第一マイクロスイッチM1と、フィルタ検知手段である第二マイクロスイッチM2とを備えているので、集塵容器30の非装着又は誤装着を検知すると共に、フィルタ体32の非装着を検知することができる。
なお、容器検知手段である第一マイクロスイッチM1のみが設けられていてもよい。この場合であっても、慣性分離によって分離された塵埃を捕集する集塵容器30の非装着又は誤装着を検知することができる。
また、上述の実施の形態では、第一マイクロスイッチM1を集塵室15の底面15aに設け、第二マイクロスイッチM2を隔壁18に設けたが、これに限られず、任意の位置に設けてもよい。
さらに、容器検知手段として、光センサや超音波センサ等の非接触タイプのセンサであってもよい。
10 電気掃除機
11 掃除機本体
13 手元操作管
16 電動送風機
20 吸込口体
24 報知ランプ(報知手段)
30 集塵容器
M1 第一マイクロスイッチ(容器検知手段)
11 掃除機本体
13 手元操作管
16 電動送風機
20 吸込口体
24 報知ランプ(報知手段)
30 集塵容器
M1 第一マイクロスイッチ(容器検知手段)
Claims (1)
- 電動送風機を内蔵した掃除機本体と、この掃除機本体に着脱自在に装着されると共に前記電動送風機の吸込負圧による慣性分離で分離された塵埃を捕集する集塵容器と、前記掃除機本体に手元操作管を介して着脱自在に接続されると共に前記集塵容器に連通する吸込口体とを備えた電気掃除機であって、
前記掃除機本体は、前記集塵容器の非装着又は誤装着を検知する容器検知手段を有し、
前記吸込口体は、前記容器検知手段の検知結果を報知する報知手段を有していることを特徴とする電気掃除機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006060862A JP2007236520A (ja) | 2006-03-07 | 2006-03-07 | 電気掃除機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006060862A JP2007236520A (ja) | 2006-03-07 | 2006-03-07 | 電気掃除機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007236520A true JP2007236520A (ja) | 2007-09-20 |
Family
ID=38582667
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006060862A Pending JP2007236520A (ja) | 2006-03-07 | 2006-03-07 | 電気掃除機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007236520A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013146295A (ja) * | 2012-01-17 | 2013-08-01 | Sharp Corp | 電気掃除機 |
| JP2015154994A (ja) * | 2015-04-24 | 2015-08-27 | シャープ株式会社 | 自走式掃除機 |
| JP2021035500A (ja) * | 2014-12-24 | 2021-03-04 | アイロボット・コーポレーション | 排出ステーション |
| US11969139B2 (en) | 2020-03-23 | 2024-04-30 | Irobot Corporation | Evacuation station |
-
2006
- 2006-03-07 JP JP2006060862A patent/JP2007236520A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013146295A (ja) * | 2012-01-17 | 2013-08-01 | Sharp Corp | 電気掃除機 |
| JP2021035500A (ja) * | 2014-12-24 | 2021-03-04 | アイロボット・コーポレーション | 排出ステーション |
| JP2015154994A (ja) * | 2015-04-24 | 2015-08-27 | シャープ株式会社 | 自走式掃除機 |
| US11969139B2 (en) | 2020-03-23 | 2024-04-30 | Irobot Corporation | Evacuation station |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2417894B1 (en) | Robot cleaner | |
| KR20070093850A (ko) | 전기 청소기 | |
| JP4342526B2 (ja) | 電気掃除機 | |
| KR101223478B1 (ko) | 로봇청소기의 먼지통 착탈 감지 장치 | |
| EP3403561B1 (en) | Robot cleaner | |
| US20070226951A1 (en) | Upright Vacuum Cleaner With Cyclonic Air Path | |
| JP2002143060A (ja) | 電気掃除機 | |
| KR20090131098A (ko) | 유량감지 유닛 및 그것을 구비한 청소장치 | |
| JP4738064B2 (ja) | 電気掃除機 | |
| JP4736644B2 (ja) | 電気掃除機 | |
| JP2007236520A (ja) | 電気掃除機 | |
| JP2013066661A (ja) | 電気掃除機 | |
| JP3964400B2 (ja) | 電気掃除機 | |
| JP5038780B2 (ja) | 電気掃除機 | |
| KR100692577B1 (ko) | 진공 청소기용 필터감지장치 | |
| JP2005095677A (ja) | 電気掃除機 | |
| JP2007244711A (ja) | 電気掃除機 | |
| JP3789106B2 (ja) | 研磨材再生処理装置の集塵機 | |
| KR100565516B1 (ko) | 진공청소기 | |
| JP3652855B2 (ja) | 電気掃除機 | |
| KR101025984B1 (ko) | 진공 청소기 | |
| JP4802072B2 (ja) | 電気掃除機 | |
| JP5176931B2 (ja) | 電気掃除機 | |
| JP2007029586A (ja) | 電気掃除機 | |
| JP4006568B2 (ja) | 集塵機 |