JP2007140992A - 交差点での運転支援方法及び運転支援装置 - Google Patents
交差点での運転支援方法及び運転支援装置 Download PDFInfo
- Publication number
- JP2007140992A JP2007140992A JP2005334834A JP2005334834A JP2007140992A JP 2007140992 A JP2007140992 A JP 2007140992A JP 2005334834 A JP2005334834 A JP 2005334834A JP 2005334834 A JP2005334834 A JP 2005334834A JP 2007140992 A JP2007140992 A JP 2007140992A
- Authority
- JP
- Japan
- Prior art keywords
- intersection
- image
- road
- vehicle
- image data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images








Abstract
【課題】見通しの悪い交差点のみ、現在走行している道路と交差する道路の画像を表示させることができる交差点での運転支援方法及び運転支援装置を提供する。
【解決手段】前方にT字路があると判断すると、CPU2はフロントカメラCA2を起動させフロントカメラCA2が撮像した撮像領域Z0のフロント画像データG2を使って画像プロセッサ10に対して見通しの良いT字路かどうか画像認識によって判別させる。CPU2は画像プロセッサ10の判別結果が見通しの良いT字路と判別すると、新たなT字路が見つかるまで道路案内画像をディスプレイ11に表示しながら走行する。一方、画像プロセッサ10が見通しの悪いT字路と判別すると、CPU2はブラインドコーナカメラCA1を起動させブラインドコーナカメラCA1が撮像した左側撮像領域Z1及び右側撮像領域Z2の画像をブラインドコーナ画像として道路案内画像に替えてディスプレイ11に表示させる。
【選択図】図1
【解決手段】前方にT字路があると判断すると、CPU2はフロントカメラCA2を起動させフロントカメラCA2が撮像した撮像領域Z0のフロント画像データG2を使って画像プロセッサ10に対して見通しの良いT字路かどうか画像認識によって判別させる。CPU2は画像プロセッサ10の判別結果が見通しの良いT字路と判別すると、新たなT字路が見つかるまで道路案内画像をディスプレイ11に表示しながら走行する。一方、画像プロセッサ10が見通しの悪いT字路と判別すると、CPU2はブラインドコーナカメラCA1を起動させブラインドコーナカメラCA1が撮像した左側撮像領域Z1及び右側撮像領域Z2の画像をブラインドコーナ画像として道路案内画像に替えてディスプレイ11に表示させる。
【選択図】図1
Description
本発明は、交差点での運転支援方法及び運転支援装置に関する。
従来より、車両の運転操作を支援する装置として、走行している自車位置をディスプレイに表示した道路地図上に表示したり、目的地までの経路を表示しその時々で的確に案内表示して車両の移動を容易にするナビゲーション装置が知られている。このナビゲーション装置において、車両に搭載したカメラを用い、予め定めた走行エリア(交差点)に車両が進入するとき、該カメラを起動させ、周辺の画像を運転者に提供する装置が提案されている(例えば、特許文献1参照)。特許文献1のナビゲーション装置では、見通しの悪い交差点を進入するとき、カメラが撮像した周辺画像を運転者に視認させることによって、交差点内の進入のためのスムースな運転操作を支援するようになっている。
特開2004−334808号公報
しかしながら、特許文献1のナビゲーション装置では、道路地図情報を使って、交差点への進入を判断する。つまり、道路地図情報に記憶されている全ての交差点について、その交差点に進入するときは、必ず、カメラが起動し周辺画像が表示されるようなっていた。従って、見通しが良く周辺画像が必要でない交差点に進入する場合にも、カメラが起動し周辺画像が表示されることから、運転者にとって煩わしい表示となっていた。
本発明は、上記問題点に鑑みてなされたものであり、その目的は、見通しの悪い交差点のみ、現在走行している道路と交差する道路の画像を表示させることができる交差点での運転支援方法及び運転支援装置を提供することにある。
請求項1に記載の発明は、車両の前端側方の側方画像を撮像する第1撮像手段を備え、前記第1撮像手段が撮像した側方画像を表示手段に表示させて、運転者に対して交差点での運転操作を支援する交差点での運転支援方法であって、前記交差点に進入するとき、現在走行している道路と交差する道路の見通しの良悪を判別し、見通しが悪いと判別した時、前記第1撮像手段にて側方画像を撮像し、撮像した側方画像を前記表示手段に表示するようにした。
請求項2に記載の発明は、請求項1に記載の交差点での運転支援方法において、前記交差する道路の見通しの良悪の判別は、前記交差点の周辺を撮像する第2撮像手段にて撮像した画像データから、前記道路を見通せない障害物の有無を画像認識して判別する。
請求項3に記載の発明は、請求項1に記載の交差点での運転支援方法において、前記交差する道路の見通しの良悪の判別は、前記交差点の周辺の道路地図情報に基づいて判別する。
請求項4に記載に発明は、請求項1〜3のいずれか1つに記載の交差点での運転支援方法において、前記交差点への進入の判断は、前記車両の自車位置と道路地図情報に基づいて検出する。
請求項5に記載の発明は、請求項1〜3のいずれか1つに記載の交差点での運転支援方
法において、前記交差点への進入の判断は、前記交差点の周辺を撮像する第2撮像手段にて撮像した画像データから前記交差点を指標する表示、設置物を画像認識して判断する。
法において、前記交差点への進入の判断は、前記交差点の周辺を撮像する第2撮像手段にて撮像した画像データから前記交差点を指標する表示、設置物を画像認識して判断する。
請求項6に記載の発明は、車両の前端側方の側方画像を撮像する第1撮像手段と、前記第1撮像手段が撮像した側方画像を表示する表示手段とを備えた運転支援装置において、前方の交差点の有無を検出する交差点検出手段と、前記交差点検出手段が、交差点を検出した時、現在走行している道路と交差する道路の見通しの良悪を判別する見通し判別手段と、前記見通し判別手段が、見通しが悪いと判別した時、前記第1撮像手段にて側方画像を撮像し、撮像した側方画像を前記表示手段に表示する表示制御手段とを設けた。
請求項7に記載の発明は、請求項6に記載の運転支援装置において、車両の交差点の周辺を撮像する第2撮像手段と、前記第2撮像手段にて撮像した画像データを取得する画像データ取得手段と、前記画像データ取得手段が取得した画像データを記憶する画像データ記憶手段と
を備え、前記見通し判別手段は、前記画像データ記憶手段に記憶した画像データから前記交差点の周辺の画像を画像認識して判別する。
を備え、前記見通し判別手段は、前記画像データ記憶手段に記憶した画像データから前記交差点の周辺の画像を画像認識して判別する。
請求項8に記載の発明は、請求項6又は7に記載の運転支援装置において、車両の自車位置を検出する自車位置検出手段と、道路地図情報を記憶する道路地図情報記憶手段とを備え、前記交差点検出手段は、前記自車位置検出手段が検出した自車位置と、前記道路地図情報記憶手段に記憶した道路地図情報に基づいて検出する。
請求項9に記載の発明は、請求項6に記載の運転支援装置において、前記交差点検出手段は、前記画像データ記憶手段に記憶した画像データから前記交差点を示す表示、設置物を画像認識して検出する。
請求項10に記載の発明は、請求項6に記載の運転支援装置において、前記交差点の周辺情報を記憶する交差点周辺情報記憶手段を備え、前記見通し判別手段は、前記交差点周辺情報記憶手段に記憶した周辺情報に基づいて判別する。
請求項1に記載の発明によれば、見通しの悪い交差点に進入するときのみに、第1撮像手段が撮像した運転席から見通せない道路を表示手段に表示することができる。
請求項2に記載の発明によれば、交差点に進入する毎に、第2撮像手段にて交差点側の周辺を撮像するため、交差点の周辺の景観が変わっても、確実にその時の交差点と交差する道路の見通しの良悪を判別することができ、的確な表示ができる。
請求項3に記載の発明によれば、交差点周辺情報記憶手段に記憶した周辺情報に基づいて判別するため、画像認識等の信号処理が不要になり判別時間は短縮されるとともに判別のための演算負荷が軽減される。
請求項4に記載の発明によれば、車両の自車位置と道路地図情報に基づいて前方にある交差点の有無を判断するので、運転者が意識することなく事前に前方の交差点を高い精度で検出できる。
請求項5に記載の発明によれば、自車位置の情報と道路地図情報がなくても、前方の交差点を検出することができる。
請求項6に記載の発明によれば、交差点検出手段が前方の交差点を検出した時、見通し判別手段は検出した交差点の手前からその交差点と交差する道路の見通しの有無を判別す
る。そして、見通し判別手段が見通しが悪いと判別した時、表示制御手段は第1撮像手段にて側方画像を撮像し、運転席から見通せない交差点と交差する道路を表示手段に表示する。従って、見通しの悪い交差点に進入するときのみに、運転席から見通せない交差点と交差する道路、すなわち、第1撮像手段が撮像した道路が表示手段に表示される。
請求項6に記載の発明によれば、交差点検出手段が前方の交差点を検出した時、見通し判別手段は検出した交差点の手前からその交差点と交差する道路の見通しの有無を判別す
る。そして、見通し判別手段が見通しが悪いと判別した時、表示制御手段は第1撮像手段にて側方画像を撮像し、運転席から見通せない交差点と交差する道路を表示手段に表示する。従って、見通しの悪い交差点に進入するときのみに、運転席から見通せない交差点と交差する道路、すなわち、第1撮像手段が撮像した道路が表示手段に表示される。
請求項7に記載の発明によれば、交差点に進入する毎に、見通し判別手段は第2撮像手段が撮像した交差点側の周辺の画像に基づいて見通しの有無のための画像認識を行う。従って、交差点の周辺の景観が変わっても、確実にその時の見通しの良悪を判別することができ、的確な表示ができる。
請求項8に記載の発明によれば、車両の自車位置と道路地図情報に基づいて前方にある交差点の有無を判断するので、運転者が意識することなく事前に前方の交差点を高い精度で検出できる。
請求項9に記載の発明によれば、自車位置の情報と道路地図情報がなくても、前方の交差点を検出することができる。
請求項10に記載の発明によれば、交差点周辺情報記憶手段に記憶した周辺情報に基づいて判別するため、画像認識等の信号処理が不要になり判別時間は短縮されるとともに判別のための演算負荷が軽減される。
請求項10に記載の発明によれば、交差点周辺情報記憶手段に記憶した周辺情報に基づいて判別するため、画像認識等の信号処理が不要になり判別時間は短縮されるとともに判別のための演算負荷が軽減される。
以下、本発明の運転支援装置を具体化した実施形態を図1〜図8に従って説明する。図1は、自動車(車両)に搭載された運転支援装置の構成を説明するブロック図である。
図1に示す運転支援装置1は、主制御を行う自車位置検出手段、画像データ取得手段、交差点検出手段、判別手段、表示制御手段としてのCPU2、CPU2の演算結果等を一時記憶するRAM3、経路案内プログラム、T字路運転支援プログラム等、各種の運転支援プログラムを記憶するROM4を備えている。
図1に示す運転支援装置1は、主制御を行う自車位置検出手段、画像データ取得手段、交差点検出手段、判別手段、表示制御手段としてのCPU2、CPU2の演算結果等を一時記憶するRAM3、経路案内プログラム、T字路運転支援プログラム等、各種の運転支援プログラムを記憶するROM4を備えている。
CPU2は、運転支援装置1のGPS受信部5から入力した位置検出信号に基づいて、絶対座標を算出する。さらに、CPU2は、車両側入力I/F部6を介して、車両Cに設けられた車速センサ21及びジャイロ22から、車速パルス信号及び方位検出信号を入力して、自律航法により基準位置からの相対座標を演算する。そして、GPS受信部5に基づく絶対座標と合わせて、自車位置を特定する。尚、車両用のXY座標系は、路面上の車両Cの位置を示すための座標系(路面座標)である。CPU2は、その時々の自車位置の路面座標値をRAM3の所定の記憶領域に更新記憶する。また、CPU2は、車両側入力I/F部6を介して、車両Cに設けられたステアリングセンサ23から、操舵角信号を入力して、その時の操舵角を演算するようになっている。
また、運転支援装置1は、道路地図情報としての経路データ8及び地図データ9を記憶した道路地図情報記憶手段としての地理データ記憶部7を備えている。経路データ8は、全国を各区域に区画したリージョン毎のデータであって、図2に示すように、ヘッダ8a、ノードデータ8b、リンクデータ8c、リンクコスト8d、座標データ8eを有している。ヘッダ8aは、各経路データ8を管理するためのデータを有している。ノードデータ8bは、交差点としてのT字路、十字路等、道路の端点等を示す各ノードの識別データ、隣接するノードの識別データ等を有している。リンクデータ8cは、リンク列を構成し、接続ノードを示す各リンクレコード、通行規制を示すデータ等を有している。リンクコスト8dは、各リンクレコードに対して付与されたリンクID、リンク長、平均旅行時間等から構成されたデータ群である。座標データ8eは、各ノードの絶対座標を示す。
一方、地図データ9は、全国の地図を分割したエリア毎に格納され、広域の地図から狭
域の地図まで各階層毎に分かれている。図3に示すように、各地図データ9は、ヘッダ9a、道路データ9b、背景データ9cを有している。ヘッダ9aは、その地図データ9の階層、エリア等を示し、管理目的のデータである。道路データ9bは、道路の形状・種類を示すデータであって、道路属性データ9d、リンク形状データ9e、接続データ9fを有している。道路属性データ9dは、道路名称、道路の方向、道路幅、車線数を有している。接続データ9fは、各リンクと各ノードの接続状態を表わすデータである。
域の地図まで各階層毎に分かれている。図3に示すように、各地図データ9は、ヘッダ9a、道路データ9b、背景データ9cを有している。ヘッダ9aは、その地図データ9の階層、エリア等を示し、管理目的のデータである。道路データ9bは、道路の形状・種類を示すデータであって、道路属性データ9d、リンク形状データ9e、接続データ9fを有している。道路属性データ9dは、道路名称、道路の方向、道路幅、車線数を有している。接続データ9fは、各リンクと各ノードの接続状態を表わすデータである。
リンク形状データ9eは、座標データ9g、形状補間データ9hを有している。座標データ9gは、リンク及びノードの座標を示している。形状補間データ9hは、リンクの途中に設定され、道路のカーブ形状を示すために設定された形状補間点に関するデータであり、形状補間点の座標、リンクの方位等のデータである。また、背景データ9cは、道路、市街地、河川等を描画する描画データである。
CPU2は、画像プロセッサ10を介してタッチパネルである表示手段としてのディスプレイ11と接続されている。ディスプレイ11は、そのディスプレイ11に隣接した位置に設けられた操作スイッチ12の入力操作により、外部入出力I/F部13を介して、目的地を示すデータを受信する。この目的地のデータを受信すると、CPU2は、経路データ8を用いて、目的地と現在の自車位置とを接続する推奨経路を探索する。
また、ディスプレイ11に隣接した位置には、T字路支援設定スイッチ12aが設けられ、T字路支援設定スイッチ12aを操作することにより、CPU2は、「T字路支援モード」となる。「T字路支援モード」は、進入する交差点としてのT字路が見通しの悪いT字路かどうか判別し、見通しの悪いT字路に進入する際に、見通しの悪い道路を見通せる画像(ブラインドコーナ画像P1)をディスプレイ11に表示するモードである。
CPU2は、車両側入力I/F部6を介して、車両Cに設けられたイグニッションスイッチ24からのオンを入力すると、画像プロセッサ10を制御して、車両Cの自車位置周辺の地図データ9を読出す。そして、CPU2は、画像プロセッサ10を介してその地図データ9に基づく地図画面30(道路案内画像P2)をディスプレイ11に出力する。このとき、画像プロセッサ10は、地図画面30に、その地図内での道路(探索して選択した目的地までの案内経路R)上に自車位置を示す指標31を重畳する。
CPU2は、車両側入力I/F部6を介して、車両Cに設けられたイグニッションスイッチ24からのオンを入力すると、画像プロセッサ10を制御して、車両Cの自車位置周辺の地図データ9を読出す。そして、CPU2は、画像プロセッサ10を介してその地図データ9に基づく地図画面30(道路案内画像P2)をディスプレイ11に出力する。このとき、画像プロセッサ10は、地図画面30に、その地図内での道路(探索して選択した目的地までの案内経路R)上に自車位置を示す指標31を重畳する。
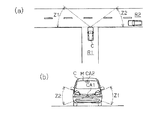
また、CPU2は、第1撮像手段としてのブラインドコーナカメラCA1及び第2撮像手段としてのフロントカメラCA2がそれぞれ接続され、「T字路支援モード」時において所定のタイミングでブラインドコーナカメラCA1及びフロントカメラCA2をそれぞれ起動させる。両カメラCA1,CA2は、広角レンズ、ミラー等から構成される光学機構と、CCD撮像素子と(いずれも図示せず)を備えている。ブラインドコーナカメラCA1は、図4(a)(b)に示すように、車両Cの前端部のグリル中央位置に取付けられ、車両Cの前端部から左右方向それぞれに向いた光軸を有し、前端部左方に広がる左側撮像領域Z1及び前端部右方に広がる右側撮像領域Z2を撮像する。
CPU2は、ブラインドコーナカメラCA1を制御して、左側撮像領域Z1及び右側撮像領域Z2を撮像した画像データをブラインド画像データG1として取得すると、画像プロセッサ10の図示しないVRAMに一時記憶する。画像プロセッサ10は、VRAMに一時記憶したブラインド画像データG1を補正処理し、補正したブラインド画像データG1に基づいて、図5に示すように、運転席に設けられたディスプレイ11にブラインドコーナ画像P1を表示するようになっている。
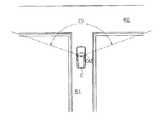
フロントカメラCA2は、図4(b)に示すように、車両Cの室内の中央に設けられたルームミラーMのステイに取付けられている、フロントカメラCA2は、図6に示すように、車両Cのフロントガラスの中央上部から、例えば左右140度の前方視野を有し、車両Cの前側を含む撮像領域Z0を撮像する。CPU2は、フロントカメラCA2を制御して、撮像領域Z0を撮像した画像データをフロント画像データG2として取得すると、画
像プロセッサ10の図示しない画像データ記憶手段としてのVRAMに一時記憶する。画像プロセッサ10は、VRAMに一時記憶したフロント画像データG2を使って画像認識を行うようになっている。CPU2は、「T字路支援モード」時において、前方にT字路が近づいた時、フロントカメラCA2を起動して撮像領域Z0を撮像したフロント画像データG2を取得すると画像プロセッサ10に出力する。CPU2は、画像プロセッサ10に対してフロント画像データG2を使って見通しの良いT字路かどうか画像認識によって判別させる。
CPU2は、ブラインドコーナカメラCA1を制御して、左側撮像領域Z1及び右側撮像領域Z2を撮像した画像データをブラインド画像データG1として取得すると、画像プロセッサ10の図示しないVRAMに一時記憶する。画像プロセッサ10は、VRAMに一時記憶したブラインド画像データG1を補正処理し、補正したブラインド画像データG1に基づいて、図5に示すように、運転席に設けられたディスプレイ11にブラインドコーナ画像P1を表示するようになっている。
フロントカメラCA2は、図4(b)に示すように、車両Cの室内の中央に設けられたルームミラーMのステイに取付けられている、フロントカメラCA2は、図6に示すように、車両Cのフロントガラスの中央上部から、例えば左右140度の前方視野を有し、車両Cの前側を含む撮像領域Z0を撮像する。CPU2は、フロントカメラCA2を制御して、撮像領域Z0を撮像した画像データをフロント画像データG2として取得すると、画
像プロセッサ10の図示しない画像データ記憶手段としてのVRAMに一時記憶する。画像プロセッサ10は、VRAMに一時記憶したフロント画像データG2を使って画像認識を行うようになっている。CPU2は、「T字路支援モード」時において、前方にT字路が近づいた時、フロントカメラCA2を起動して撮像領域Z0を撮像したフロント画像データG2を取得すると画像プロセッサ10に出力する。CPU2は、画像プロセッサ10に対してフロント画像データG2を使って見通しの良いT字路かどうか画像認識によって判別させる。
画像プロセッサ10は、ディスプレイ11にブラインドコーナ画像P1を表示するほかに、フロント画像データG2に基づいて、T字路で交差する道路を遮る建物、街路樹等の障害物があるかどうかを画像認識する。例えば、図7(a)に示すフロント画像データG2に基づく画像P3にように、現在走行している道路R1の左側部に道路R1と交差する道路R2を遮る建物(障害物)M1ある場合には、画像プロセッサ10はこの建物(障害物)M1の存在を画像認識して見通しが悪いT字路と判別しその判別結果をRAM3に記憶する。また、図7(b)に示すフロント画像データG2に基づく画像P3のように、現在走行している道路R1の左右両側部に道路R1と交差する道路R2を遮る街路樹(障害物)M2ある場合には、画像プロセッサ10はこの街路樹(障害物)M2の存在を画像認識して見通しが悪いT字路と判別しその判別結果をRAM3に記憶する。さらに、図7(c)に示すフロント画像データG2に基づく画像P3のように、現在走行している道路R1の左右両側部に道路R1と交差する道路R2を遮るものがない場合には、画像プロセッサ10はこの障害物がなくT字路と交差する道路R2を画像認識して見通しが良いT字路と判別しその判別結果をRAM3に記憶する。
CPU2は、音声プロセッサ14を介してスピーカ15に接続され、その時々に経路案内のための音声案内をするとともに、「T字路支援モード」時において、「T字路支援モード」を実行している旨の音声案内を行う。
次に、本実施形態の運転支援装置1のT字路運転支援処理を、図8に示すCPU2の処理手順を示すフローチャートに従って説明する。
次に、本実施形態の運転支援装置1のT字路運転支援処理を、図8に示すCPU2の処理手順を示すフローチャートに従って説明する。
今、イグニッションスイッチ24をオンさせた後、運転者によるT字路支援設定スイッチ12aの選択操作に基づいて、CPU2は「T字路運転支援モード」となり、図8にフローチャートに示すT字路運転支援プログラムを実行する。
まず、CPU2は、GPS受信部5、車速センサ21及びジャイロ22からの各信号に基づいて車両Cの自車位置を求める(ステップS1)。なお、本実施形態では、T字路運転支援プログラムとともに、目的地までの案内経路が複数探索されその中の選択された1つの案内経路Rを案内表示する経路案内プログラムも実行されているものとする。従って、CPU2は、ディスプレイ11に道路地図を表示するとともに、目的地までの案内経路Rが表示される。そして、CPU2は算出した自車位置に基づいて自車位置を示す指標31を合わせた道路案内画像P2をディスプレイ11に表示する。
続いて、CPU2は求めた自車位置と地理データ記憶部7に記憶した経路データ8及び地図データ9に基づいて、車両Cが前記案内経路Rに従って走行して行く前方であって予め定めた距離(本実施形態では100メートル)の先にT字路があるかどうかチェックする(ステップS2)。そして、前方100メートル先にT字路がないと演算した場合(ステップS2でNO)、CPU2はステップS10に移り、T字路運転支援モードが終了かどうかチェックする。
CPU2は、T字路運転支援モードが終了かどうかの判断を、イグニッションスイッチ24又はT字路支援設定スイッチ12aがオフされたかどうかで判断する。そして、T字
路運転支援モードが終了しない場合には(ステップS10でNO)、CPU2はステップS1に戻り新たな自車位置の算出を行う。すなわち、T字路が見つかるまでは、自車位置を更新しながら走行する。従って、CPU2は、案内経路とともに自車位置を示す指標31を表示した道路案内画像P2をディスプレイ11に表示しながら運転者に経路案内をする。
やがて、車両Cが100メートル前方にT字路があると判断すると(ステップS2でYES)、CPU2はフロントカメラCA2を起動させフロントカメラCA2が撮像した撮像領域Z0のフロント画像データG2を取得し画像プロセッサ10に一時記憶する(ステップS3)。そして、CPU2はその記憶したフロント画像データG2を使って画像プロセッサ10に対して見通しの良いT字路かどうか画像認識によって判別させる(ステップS4)。画像プロセッサ10は、フロント画像データG2に基づいて、T字路で交差する道路R2を遮る建物M1、街路樹M2等の障害物があるかどうかを画像認識する。画像プロセッサ10は、画像認識して見通しが良いT字路かどうか判別しその判別結果をRAM3に記憶する。
CPU2は、画像プロセッサ10の判別結果が見通しが良いT字路と判別すると(ステップS5でNO)、ステップS10に移り、T字路運転支援モードが終了かどうかを判断する。そして、T字路運転支援モードが終了しない場合には(ステップS10でNO)、CPU2はステップS1に戻り新たな自車位置の算出を行う。すなわち、T字路が見つか
るまでは、道路案内画像P2をディスプレイ11に表示しながら走行する。
路運転支援モードが終了しない場合には(ステップS10でNO)、CPU2はステップS1に戻り新たな自車位置の算出を行う。すなわち、T字路が見つかるまでは、自車位置を更新しながら走行する。従って、CPU2は、案内経路とともに自車位置を示す指標31を表示した道路案内画像P2をディスプレイ11に表示しながら運転者に経路案内をする。
やがて、車両Cが100メートル前方にT字路があると判断すると(ステップS2でYES)、CPU2はフロントカメラCA2を起動させフロントカメラCA2が撮像した撮像領域Z0のフロント画像データG2を取得し画像プロセッサ10に一時記憶する(ステップS3)。そして、CPU2はその記憶したフロント画像データG2を使って画像プロセッサ10に対して見通しの良いT字路かどうか画像認識によって判別させる(ステップS4)。画像プロセッサ10は、フロント画像データG2に基づいて、T字路で交差する道路R2を遮る建物M1、街路樹M2等の障害物があるかどうかを画像認識する。画像プロセッサ10は、画像認識して見通しが良いT字路かどうか判別しその判別結果をRAM3に記憶する。
CPU2は、画像プロセッサ10の判別結果が見通しが良いT字路と判別すると(ステップS5でNO)、ステップS10に移り、T字路運転支援モードが終了かどうかを判断する。そして、T字路運転支援モードが終了しない場合には(ステップS10でNO)、CPU2はステップS1に戻り新たな自車位置の算出を行う。すなわち、T字路が見つか
るまでは、道路案内画像P2をディスプレイ11に表示しながら走行する。
一方、画像プロセッサ10の判別結果が見通しが悪いT字路と判別すると(ステップS5でYES)、CPU2はブラインドコーナカメラCA1を起動させる(ステップS6)。CPU2は、ブラインドコーナカメラCA1が撮像した左側撮像領域Z1及び右側撮像領域Z2の画像をブラインドコーナ画像P1として前記道路案内画像P2に替えてディスプレイ11に表示させる(ステップS7)。この時、CPU2は、音声プロセッサ14を介してスピーカ15から「見通しの悪いT字路に進入します。左右を確認して進入して下さい。」という音声案内する。
続いて、CPU2はT字路に進入し交差する道路R2の車線に入ったかどうか判断する(ステップS8)。T字路に交差する道路R2の車線に入ったかどうかの判断は、車両Cの方位が変わったことをジャイロ22からの方位検出信号に基づいて判断する。なお、ジャイロ22からの方位検出信号に代えてステアリングの操舵角の変化に基づいて判断してもよい。そして、車両CがT字路に交差する道路R2の車線に入るまで、ブラインドコーナ画像P1の表示を続ける。
車両CがT字路に交差する道路R2の車線に入ると(ステップS8でYES)、CPU2はディスプレイ11に表示をブラインドコーナ画像P1から道路案内画像P2の表示に切り替える(ステップS9)。道路案内画像P2の表示に切り替えると、CPU2は、ステップS10に移り、T字路運転支援モードが終了かどうかを判断する。そして、T字路運転支援モードが終了しない場合には(ステップS10でNO)、CPU2はステップS1に戻り前記と同様な処理を行う。すなわち、T字路運転支援モードが終了までは、見通しの悪いT字路を進入するときにはブラインドコーナ画像P1が、それ以外のときには道路案内画像P2がディスプレイ11に表示される。
車両CがT字路に交差する道路R2の車線に入ると(ステップS8でYES)、CPU2はディスプレイ11に表示をブラインドコーナ画像P1から道路案内画像P2の表示に切り替える(ステップS9)。道路案内画像P2の表示に切り替えると、CPU2は、ステップS10に移り、T字路運転支援モードが終了かどうかを判断する。そして、T字路運転支援モードが終了しない場合には(ステップS10でNO)、CPU2はステップS1に戻り前記と同様な処理を行う。すなわち、T字路運転支援モードが終了までは、見通しの悪いT字路を進入するときにはブラインドコーナ画像P1が、それ以外のときには道路案内画像P2がディスプレイ11に表示される。
本実施形態によれば、以下のような効果を得ることができる。
(1)本実施形態では、見通しの悪いT字路に進入するときのみに、ブラインドコーナカメラCA1が撮像したブラインドコーナ画像P1をディスプレイ11に表示させることができる。
従って、見通しが良いT字路に進入する場合には、ブラインドコーナカメラCA1が起動しブラインドコーナ画像P1が表示されることがなく運転者にとって煩わしい表示がなくなる。
(2)本実施形態では、車両Cの自車位置と地理データ記憶部7に記憶した経路データ8及び地図データ9に基づいて、前方にあるT字路の有無を判断するようにしたので、運転者が意識することなく、事前に前方のT字路が高い精度で検出できる。
(3)本実施形態では、車両CがT字路に交差する道路R2の車線に入ると、ブラインドコーナ画像P1から道路案内画像P2に切り替わるので、いちいち画像切り替えのための操作は必要がない。
(4)本実施形態では、T字路に進入する毎に、フロントカメラCA2が撮像した車両Cのフロントガラスの中央上部から前方の撮像領域Z0を撮像したフロント画像データG2を使って画像認識を行い見通しの良いT字路かどうかを判別するようにした。従って、T字路の周辺の景観が変わっても、確実にその時のT字路の見通しの良し悪しを判別することができ、的確な表示ができる。
(1)本実施形態では、見通しの悪いT字路に進入するときのみに、ブラインドコーナカメラCA1が撮像したブラインドコーナ画像P1をディスプレイ11に表示させることができる。
従って、見通しが良いT字路に進入する場合には、ブラインドコーナカメラCA1が起動しブラインドコーナ画像P1が表示されることがなく運転者にとって煩わしい表示がなくなる。
(2)本実施形態では、車両Cの自車位置と地理データ記憶部7に記憶した経路データ8及び地図データ9に基づいて、前方にあるT字路の有無を判断するようにしたので、運転者が意識することなく、事前に前方のT字路が高い精度で検出できる。
(3)本実施形態では、車両CがT字路に交差する道路R2の車線に入ると、ブラインドコーナ画像P1から道路案内画像P2に切り替わるので、いちいち画像切り替えのための操作は必要がない。
(4)本実施形態では、T字路に進入する毎に、フロントカメラCA2が撮像した車両Cのフロントガラスの中央上部から前方の撮像領域Z0を撮像したフロント画像データG2を使って画像認識を行い見通しの良いT字路かどうかを判別するようにした。従って、T字路の周辺の景観が変わっても、確実にその時のT字路の見通しの良し悪しを判別することができ、的確な表示ができる。
(5)本実施形態では、見通しが悪いT字路に進入する場合には、その旨を音声案内して運転者に警告するため、運転者に確実により慎重な運転を指示することができる。しかも、見通しが良いT字路に進入する場合には、音声案内を行わないので煩わしさはない。
尚、上記各実施形態は以下のように変更してもよい。
・上記実施形態は、自車位置の情報と地理データ記憶部7に記憶した経路データ8及び地図データ9に基づいて前方のT字路を検出した。これを常時、フロントカメラCA2を起動させておき、常時、車両Cの前方を撮像する。そして、その時々に撮像した画像から、T字路に特有の設置物を画像認識により検出する。例えば、図9に示すような、道路R1の延長線上の正面中央に反射ミラーM3が映った画像P4を取得したとき、この反射ミラーM3を画像認識して前方にT字路があることを検出する。また、図10に示すような、道路R1に一時停止線M4が映った画像P4を取得したとき、この時停止線M4を画像認識して前方にT字路があることを検出する。その他、一時停止標識や、信号機のない交差点の画像を取得したとき、これらを画像認識して前方にT字路があることを検出するようにしてもよい。
・上記実施形態は、自車位置の情報と地理データ記憶部7に記憶した経路データ8及び地図データ9に基づいて前方のT字路を検出した。これを常時、フロントカメラCA2を起動させておき、常時、車両Cの前方を撮像する。そして、その時々に撮像した画像から、T字路に特有の設置物を画像認識により検出する。例えば、図9に示すような、道路R1の延長線上の正面中央に反射ミラーM3が映った画像P4を取得したとき、この反射ミラーM3を画像認識して前方にT字路があることを検出する。また、図10に示すような、道路R1に一時停止線M4が映った画像P4を取得したとき、この時停止線M4を画像認識して前方にT字路があることを検出する。その他、一時停止標識や、信号機のない交差点の画像を取得したとき、これらを画像認識して前方にT字路があることを検出するようにしてもよい。
従って、自車位置の情報と道路地図情報がなくても、前方のT字路を検出することができ、例えば、道路地図情報がない新しくできた道路の場合に有効である。
この場合、フロントカメラCA2を使用したが、フロントカメラCA2以外であってT字路を検出するためだけのカメラを使用して実施してもよい。
この場合、フロントカメラCA2を使用したが、フロントカメラCA2以外であってT字路を検出するためだけのカメラを使用して実施してもよい。
・上記実施形態では、予め定めた距離を100メートルとし、その100メートル先のT字路を検出としたが、これを、例えば50メートル、20メートル、5メートル等、適宜変更して実施してもよい。
・上記実施形態では、フロントカメラCA2が撮像したフロント画像データG2(画像P3)を使って画像認識を行い、T字路と交差する道路R2を遮る建物M1、街路樹M2等の障害物を検出し、その障害物の有無によってT字路の見通しの良し悪しを判別した。これを、各T字路について、見通しが悪いか又は見通しが良いかを示す周辺情報を、交差点周辺情報記憶手段、例えば地理データ記憶部7に予め記憶しておく。そして、そのT字路を検出したとき、該T字路の周辺情報を地理データ記憶部7から読み出し、その読み出した周辺情報によって見通しが悪いか又は見通しが良いかで判別するようにしてもよい。
また、フロントカメラCA2が撮像したフロント画像データG2(画像P3)を使って画像認識を行い、見通しの悪いT字路と判別したとき、その判別した見通しの悪いT字路を示す周辺情報として生成して新たに交差点周辺情報記憶手段、例えば地理データ記憶部7またはその他の記憶手段に追加記憶しおく。そして、そのT字路を検出したとき、該T字路の周辺情報を地理データ記憶部7から読み出し、その読み出した周辺情報によって見通しが悪いか又は見通しが良いかで判別するようにしてもよい。
この場合、画像認識等の信号処理が不要になるため、演算のための負荷が軽減されると
もに、判別時間も短縮することができる。
・上記実施形態では、第1撮像手段を車両Cの前端部のグリル中央位置に取付けたブラインドコーナカメラCA1で実施した。これを、前部バンパーの左右コーナ部に、それぞれ側方を撮像するカメラを用いて実施してもよい。要は、前端部左方に広がる左側撮像領域Z1及び前端部右方に広がる右側撮像領域Z2が撮像できるカメラであればどんな構成でもよい。
・上記実施形態では、フロントカメラCA2が撮像したフロント画像データG2(画像P3)を使って画像認識を行い、T字路と交差する道路R2を遮る建物M1、街路樹M2等の障害物を検出し、その障害物の有無によってT字路の見通しの良し悪しを判別した。これを、各T字路について、見通しが悪いか又は見通しが良いかを示す周辺情報を、交差点周辺情報記憶手段、例えば地理データ記憶部7に予め記憶しておく。そして、そのT字路を検出したとき、該T字路の周辺情報を地理データ記憶部7から読み出し、その読み出した周辺情報によって見通しが悪いか又は見通しが良いかで判別するようにしてもよい。
また、フロントカメラCA2が撮像したフロント画像データG2(画像P3)を使って画像認識を行い、見通しの悪いT字路と判別したとき、その判別した見通しの悪いT字路を示す周辺情報として生成して新たに交差点周辺情報記憶手段、例えば地理データ記憶部7またはその他の記憶手段に追加記憶しおく。そして、そのT字路を検出したとき、該T字路の周辺情報を地理データ記憶部7から読み出し、その読み出した周辺情報によって見通しが悪いか又は見通しが良いかで判別するようにしてもよい。
この場合、画像認識等の信号処理が不要になるため、演算のための負荷が軽減されると
もに、判別時間も短縮することができる。
・上記実施形態では、第1撮像手段を車両Cの前端部のグリル中央位置に取付けたブラインドコーナカメラCA1で実施した。これを、前部バンパーの左右コーナ部に、それぞれ側方を撮像するカメラを用いて実施してもよい。要は、前端部左方に広がる左側撮像領域Z1及び前端部右方に広がる右側撮像領域Z2が撮像できるカメラであればどんな構成でもよい。
・上記実施形態では、探索し選択した目的地までの案内経路Rに沿って走行している場合について前方のT字路を検出したが、案内経路Rを設定していないで走行している場合には、走行中の道路の道なりを走行経路として、その走行経路に沿った延長線上のT字路を検出するようにして実施してもよい。
・上記実施形態では、交差点としてT字路に具体化したが、十字路でもよく、要は道路と道路が交差する箇所であればよい。
1…運転支援装置、2…自車位置検出手段、画像データ取得手段、交差点検出手段、判別手段、表示制御手段としてのCPU、3…RAM、4…ROM、5…GPS受信部、7…道路地図情報記憶手段としての地理データ記憶部、10…画像プロセッサ、11…表示手段としてのディスプレイ、12a…T字路運転支援設定スイッチ、22…ジャイロ、23…ステアリングセンサ、31…指標、C…車両、CA1…第1撮像手段としてのブラインドコーナカメラ、CA2…第2撮像手段、第3撮像手段としてのフロントカメラ、M1…建物、M2…街路樹、R…案内経路、R1,R2…道路、P1…ブラインドコーナ画像、P2…道路案内画像、P3…画像。
Claims (10)
- 車両の前端側方の側方画像を撮像する第1撮像手段を備え、前記第1撮像手段が撮像した側方画像を表示手段に表示させて、運転者に対して交差点での運転操作を支援する交差点での運転支援方法であって、
前記交差点に進入するとき、現在走行している道路と交差する道路の見通しの良悪を判別し、見通しが悪いと判別した時、前記第1撮像手段にて側方画像を撮像し、撮像した側方画像を前記表示手段に表示するようにしたことを特徴とする交差点での運転支援方法。 - 請求項1に記載の交差点での運転支援方法において、
前記交差する道路の見通しの良悪の判別は、前記交差点の周辺を撮像する第2撮像手段にて撮像した画像データから、前記道路を見通せない障害物の有無を画像認識して判別することを特徴とする交差点での運転支援方法。 - 請求項1に記載の交差点での運転支援方法において、
前記交差する道路の見通しの良悪の判別は、前記交差点の周辺の道路地図情報に基づいて判別することを特徴とする交差点での運転支援方法。 - 請求項1〜3のいずれか1つに記載の交差点での運転支援方法において、
前記交差点への進入の判断は、前記車両の自車位置と道路地図情報に基づいて検出することを特徴する交差点での運転支援方法。 - 請求項1〜3のいずれか1つに記載の交差点での運転支援方法において、
前記交差点への進入の判断は、前記交差点の周辺を撮像する第2撮像手段にて撮像した画像データから前記交差点を指標する表示、設置物を画像認識して判断することを特徴とする交差点での運転支援方法。 - 車両の前端側方の側方画像を撮像する第1撮像手段と、
前記第1撮像手段が撮像した側方画像を表示する表示手段と
を備えた運転支援装置において、
前方の交差点の有無を検出する交差点検出手段と、
前記交差点検出手段が、交差点を検出した時、現在走行している道路と交差する道路の見通しの良悪を判別する見通し判別手段と、
前記見通し判別手段が、見通しが悪いと判別した時、前記第1撮像手段にて側方画像を撮像し、撮像した側方画像を前記表示手段に表示する表示制御手段と
を設けたことを特徴とする交差点での運転支援装置。 - 請求項6に記載の運転支援装置において、
車両の交差点の周辺を撮像する第2撮像手段と、
前記第2撮像手段にて撮像した画像データを取得する画像データ取得手段と、
前記画像データ取得手段が取得した画像データを記憶する画像データ記憶手段と
を備え、
前記見通し判別手段は、前記画像データ記憶手段に記憶した画像データから前記交差点の周辺の画像を画像認識して判別することを特徴とする交差点での運転支援装置。 - 請求項6又は7に記載の運転支援装置において、
車両の自車位置を検出する自車位置検出手段と、
道路地図情報を記憶する道路地図情報記憶手段と
を備え、
前記交差点検出手段は、前記自車位置検出手段が検出した自車位置と、前記道路地図情
報記憶手段に記憶した道路地図情報に基づいて検出することを特徴する運転支援装置。 - 請求項7に記載の運転支援装置において、
前記交差点検出手段は、前記画像データ記憶手段に記憶した画像データから前記交差点を示す表示、設置物を画像認識して検出することを特徴する運転支援装置。 - 請求項6に記載の運転支援装置において、
前記交差点の周辺情報を記憶する交差点周辺情報記憶手段を備え、
前記見通し判別手段は、前記交差点周辺情報記憶手段に記憶した周辺情報に基づいて判別することを特徴とする交差点での運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005334834A JP2007140992A (ja) | 2005-11-18 | 2005-11-18 | 交差点での運転支援方法及び運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005334834A JP2007140992A (ja) | 2005-11-18 | 2005-11-18 | 交差点での運転支援方法及び運転支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007140992A true JP2007140992A (ja) | 2007-06-07 |
Family
ID=38203758
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005334834A Abandoned JP2007140992A (ja) | 2005-11-18 | 2005-11-18 | 交差点での運転支援方法及び運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007140992A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009067292A (ja) * | 2007-09-14 | 2009-04-02 | Hitachi Ltd | 車載カメラシステム |
| JP2009086839A (ja) * | 2007-09-28 | 2009-04-23 | Nissan Motor Co Ltd | 車両用情報報知装置、情報提供システム、情報報知方法 |
| JP2010002275A (ja) * | 2008-06-19 | 2010-01-07 | Aisin Seiki Co Ltd | 車両周辺監視装置 |
| JP2011134237A (ja) * | 2009-12-25 | 2011-07-07 | Toshiba Alpine Automotive Technology Corp | 車両用画像表示装置及び車両用画像表示方法 |
| WO2014024763A1 (ja) | 2012-08-08 | 2014-02-13 | 日産自動車株式会社 | 路面状態検出装置及び路面状態検出方法 |
-
2005
- 2005-11-18 JP JP2005334834A patent/JP2007140992A/ja not_active Abandoned
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009067292A (ja) * | 2007-09-14 | 2009-04-02 | Hitachi Ltd | 車載カメラシステム |
| JP2009086839A (ja) * | 2007-09-28 | 2009-04-23 | Nissan Motor Co Ltd | 車両用情報報知装置、情報提供システム、情報報知方法 |
| JP2010002275A (ja) * | 2008-06-19 | 2010-01-07 | Aisin Seiki Co Ltd | 車両周辺監視装置 |
| JP2011134237A (ja) * | 2009-12-25 | 2011-07-07 | Toshiba Alpine Automotive Technology Corp | 車両用画像表示装置及び車両用画像表示方法 |
| WO2014024763A1 (ja) | 2012-08-08 | 2014-02-13 | 日産自動車株式会社 | 路面状態検出装置及び路面状態検出方法 |
| US9341708B2 (en) | 2012-08-08 | 2016-05-17 | Nissan Motor Co., Ltd. | Road surface condition detection device and road surface condition detection method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6700623B2 (ja) | 走行支援装置及びコンピュータプログラム | |
| US11535155B2 (en) | Superimposed-image display device and computer program | |
| JP4432801B2 (ja) | 運転支援装置 | |
| US11511627B2 (en) | Display device and computer program | |
| JP5461065B2 (ja) | 現在位置特定装置とその現在位置特定方法 | |
| EP2336998B1 (en) | Travel guiding apparatus for vehicle, travel guiding method for vehicle, and computer-readable storage medium | |
| US8130269B2 (en) | Visual recognition apparatus, methods, and programs for vehicles | |
| US8103442B2 (en) | Navigation device and its method | |
| JP5136500B2 (ja) | 運転支援装置、運転支援方法及び運転支援プログラム | |
| JP2007226666A (ja) | 運転支援方法及び運転支援装置 | |
| JP2017110924A (ja) | 経路探索装置及び車両用自動運転装置 | |
| US20230135641A1 (en) | Superimposed image display device | |
| JP6361403B2 (ja) | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム | |
| JP4787196B2 (ja) | 車載用ナビゲーション装置 | |
| US20090201173A1 (en) | Driving support apparatus, a driving support method and program | |
| JP2008097279A (ja) | 車両外部情報表示装置 | |
| JP2007140992A (ja) | 交差点での運転支援方法及び運転支援装置 | |
| JP5156307B2 (ja) | 車載カメラシステム | |
| JP4968369B2 (ja) | 車載装置及び車両認識方法 | |
| JP5134608B2 (ja) | 車両周辺表示装置、車両周辺表示方法およびプログラム | |
| JP2023012793A (ja) | 重畳画像表示装置 | |
| JP4687381B2 (ja) | 車両認識方法及び車載装置 | |
| JP2007233430A (ja) | 運転支援方法及び運転支援装置 | |
| JP2007122395A (ja) | 車両の方向転回判定方法及び車両の方向転回判定装置 | |
| JP7302389B2 (ja) | 重畳画像表示装置及びコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080218 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20090707 |