JP2007004318A - 画像処理方法、画像処理を実行するためのプログラム、及び、当該プログラムが記憶された記憶媒体 - Google Patents
画像処理方法、画像処理を実行するためのプログラム、及び、当該プログラムが記憶された記憶媒体 Download PDFInfo
- Publication number
- JP2007004318A JP2007004318A JP2005181356A JP2005181356A JP2007004318A JP 2007004318 A JP2007004318 A JP 2007004318A JP 2005181356 A JP2005181356 A JP 2005181356A JP 2005181356 A JP2005181356 A JP 2005181356A JP 2007004318 A JP2007004318 A JP 2007004318A
- Authority
- JP
- Japan
- Prior art keywords
- image processing
- image
- distance
- camera
- dimensional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Abstract
【解決手段】 距離画像カメラと画像処理装置とを含み、距離画像カメラの出力を画像処理装置に入力し所定の画像処理を実行する画像処理方法において、前記画像処理装置は、前記距離画像カメラからの出力に基づいて、画像処理プログラムにより定義される仮想空間内に2次元又は3次元のモデルを生成し、このモデルと仮想空間内の当り判定領域との当り判定を行い、この判定結果に応じて前記画像処理を実行する。
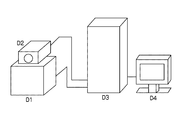
【選択図】 図1
Description
次に、距離画像カメラから出力された情報を利用した画像処理の実施形態について説明する。ここで基本となる画像処理は、画面上方から仮想的なオブジェクトを複数落下させるものである。この画像処理は、画像処理装置が画像処理プログラムを実行することによって達成される。画像処理プログラムは、距離画像カメラから見た対象物(被写体)の座標系と仮想空間の座標系とを対応させて、距離画像カメラの出力から2次元又は3次元のモデルを生成し、これを仮想空間の座標系に配置する。
落下物を楕円状のオブジェクトではなく、水流であり、画面全体で滝を表現する。落下する水流が衝突領域に衝突したら、水流の運動方向を変化させると同時に、その場所に水しぶきの映像効果を発生させる。水流が存在している場所では、合成するカラー画像を歪ませることで、水の屈折を表現する。衝突領域の下側などで水流が存在していない場所では、カラー画像を歪ませずに合成する。
上記実施形態1および実施形態2では、距離の閾値Tを用いて、衝突領域ビットマップを作成していた。しかし、落下物の位置が奥行き方向に分布を持つ場合、固定の閾値を用いた判定はできない。その代わり、以下の方法で衝突判定を行う。距離画像の取得、平滑化、及び正規化は、図3の場合と同じである。この実施形態では、衝突領域ビットマップの作成は行わない。各落下物は、自身の位置に対応する、画像領域についての距離画像の値と、自身の奥行きの座標値とを比較し、距離画像の値のほうが自身の奥行きの座標値よりも小さい場合に、衝突したと判断する。なお、この実施形態の場合は、画像処理装置が被写体の3次元モデルを作成することにより、奥行き方向を持った落下物との衝突を判定することができる。
距離画像カメラからある一定の距離(Tとする)に、仮想的な水面(当り判断領域)を設定する。距離画像の各画素の値について、Tより小さな場合、水面に衝突があったと判定し、波を生成する。生成された波は、時間経過とともに、波動方程式に従って水面上を伝播し、波紋が形成され、水面上の各点には仮想的な勾配が生じる。この勾配に基づき、カラー画像を歪ませることで、水面に映る遊戯者の映像が波紋により揺らめく様を表現する。また、勾配の向きと程度により、合成画像の各画素の輝度を変化させることで、水と光の質感を表現する。
画面内に、仮想的な小物体を複数設置する。距離画像カメラから取得した距離画像の各画素のうち、最も値が小さい(奥行きが浅い)所について、その距離の値Czと位置座標(Cx,Cy)とを検出する。Czがある設定値T1より近くなった場合、その座標に対して最も近くにある物体を「つかんだ」状態にする。「つかんだ」状態にある小物体は、時間経過に伴う(Cx,Cy)の変化に追従して、自身の位置座標を変化させる。これにより、例えば手で画面内の小物体を直接つかんで動かしているような操作感を得られる。ある小物体が「つかんだ」状態にあるときに、Czの値がある設定値T2より大きくなった場合、「つかんだ」状態は解除される。これにより、小物体をつかんだ手を引っ込めることで、その小物体をその場所に置くという操作感が得られる。
画面内に、仮想的なボクシングの相手選手を作る。距離画像カメラから取得した距離画像の各画素のうち、最も値が小さい(奥行きが浅い)所について、その距離の値Czと位置座標(Cx,Cy)とを検出する。Czがある設定値T1より近くなった場合であって、かつ(Cx,Cy)が相手の顔や体の位置である場合、遊戯者は相手のその部位にパンチをあてたものと判定する。パンチを当てた部位により、相手の反応を変化させる。また、パンチがあたるまでの間、時間経過に伴う(Cx,Cy)の変化の履歴を記録していき、パンチが当たった際にその履歴を利用してパンチの種類を決定する。すなわち、(Cx,Cy)が右のほうから相手の顔の位置に向かって変化した場合、それは相手の顔への右フックであると判定する。
各画素の距離データが8ビットの場合は0から255までの数値で被写体や背景までの距離が出力される。
尚、距離によって数値を大きくするか小さくするかは距離を算出する計算式の設定により変更可能である。そして、これら距離を示す数値に対して閾値を設定して、閾値より数値が大きいか小さいかで被写体を抽出する。
ポリゴンモデルの生成後は、そのままレンダリング処理を行っても良いが、CCDカメラD2により撮影された画像をテクスチャに用いて、ポリゴンモデルにマッピング処理しても良い。
Claims (7)
- 距離画像カメラと画像処理装置とを含み、距離画像カメラの出力を画像処理装置に入力し所定の画像処理を実行する画像処理方法において、
前記画像処理装置は、前記距離画像カメラからの出力に基づいて、画像処理プログラムにより定義される仮想空間内に2次元又は3次元のモデルを生成し、このモデルと仮想空間内の当り判定領域との当り判定を行い、この判定結果に応じて前記画像処理を実行する画像処理方法。 - 距離画像カメラと画像処理装置とを含み、距離画像カメラの出力を画像処理装置に入力し所定の画像処理を実行してなる画像処理方法おいて、
前記画像処理装置は、前記距離画像カメラからの出力に基づいて、画像処理プログラムにより定義される仮想空間内に2次元又は3次元のモデルを生成し、このモデルと仮想空間内のオブジェクトとの当り判定を行い、この判定結果に応じて前記画像処理を実行する画像処理方法。 - 前記画像処理装置は、画像処理の結果の映像に、別途撮影した映像を合成するようにした請求項1又は2記載の画像処理方法。
- 距離画像カメラと画像処理装置とを含み、距離画像カメラの出力を画像処理装置に入力し所定の画像処理を実行する画像処理方法おいて、
前記画像処理装置は、前記距離画像カメラからの出力に基づいて、画像処理プログラムにより定義される仮想空間内に2次元又は3次元のモデルを前記仮想空間内に生成する画像処理方法。 - 前記モデルに、別途撮影した画像をテクスチャとして合成した請求項4記載の画像処理方法。
- 請求項1乃至5の何れか1項記載の画像処理方法を、前記画像処理装置のコンピュータに実行させる、当該コンピュータが読み取り可能なプログラム。
- 請求項6記載のプログラムが記憶された、DVD、CD、及びハードディスク等の記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005181356A JP2007004318A (ja) | 2005-06-22 | 2005-06-22 | 画像処理方法、画像処理を実行するためのプログラム、及び、当該プログラムが記憶された記憶媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005181356A JP2007004318A (ja) | 2005-06-22 | 2005-06-22 | 画像処理方法、画像処理を実行するためのプログラム、及び、当該プログラムが記憶された記憶媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007004318A true JP2007004318A (ja) | 2007-01-11 |
| JP2007004318A5 JP2007004318A5 (ja) | 2008-08-07 |
Family
ID=37689907
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005181356A Withdrawn JP2007004318A (ja) | 2005-06-22 | 2005-06-22 | 画像処理方法、画像処理を実行するためのプログラム、及び、当該プログラムが記憶された記憶媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007004318A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010516153A (ja) * | 2007-01-14 | 2010-05-13 | マイクロソフト インターナショナル ホールディングス ビイ.ヴイ. | 画像処理のための方法、装置及びシステム |
| JP2011215920A (ja) * | 2010-03-31 | 2011-10-27 | Namco Bandai Games Inc | プログラム、情報記憶媒体及び画像生成システム |
| JP2012527025A (ja) * | 2009-05-14 | 2012-11-01 | アルカテル−ルーセント | 物体の3次元モデルを生成する方法 |
| JP2013097806A (ja) * | 2011-11-01 | 2013-05-20 | Samsung Electronics Co Ltd | 映像処理装置及び方法 |
| JP2015019346A (ja) * | 2013-06-12 | 2015-01-29 | 日本放送協会 | 視差画像生成装置 |
| KR101526866B1 (ko) * | 2009-01-21 | 2015-06-10 | 삼성전자주식회사 | 깊이 정보를 이용한 깊이 노이즈 필터링 방법 및 장치 |
| CN105051792A (zh) * | 2012-12-26 | 2015-11-11 | 英特尔公司 | 用于使用深度映射和光源合成增强3d图像的设备 |
| JP2018055257A (ja) * | 2016-09-27 | 2018-04-05 | キヤノン株式会社 | 情報処理装置、およびその制御方法ならびにプログラム |
| CN111921199A (zh) * | 2020-08-25 | 2020-11-13 | 腾讯科技(深圳)有限公司 | 虚拟对象的状态检测方法、装置、终端及存储介质 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1153563A (ja) * | 1997-07-31 | 1999-02-26 | Sony Corp | 姿勢検出ゲーム装置およびゲーム方法 |
| JPH1188910A (ja) * | 1997-09-02 | 1999-03-30 | Canon Inc | 3次元モデル生成装置、3次元モデル生成方法、3次元モデル生成プログラムを記録した媒体、3次元モデル再生装置、3次元モデル再生方法及び3次元モデル再生プログラムを記録した媒体 |
| JP2000020193A (ja) * | 1998-06-29 | 2000-01-21 | Toshiba Corp | 仮想物体制御方法および仮想物体制御装置および記録媒体 |
| JP2000172878A (ja) * | 1998-12-09 | 2000-06-23 | Sony Corp | 情報処理装置および情報処理方法、並びに提供媒体 |
| JP2003057007A (ja) * | 2001-08-10 | 2003-02-26 | Matsushita Electric Works Ltd | 距離画像を用いた人体検知方法 |
| JP2003296707A (ja) * | 2002-03-29 | 2003-10-17 | Toshiba Corp | 3次元オブジェクト生成装置及び方法 |
| JP2004202007A (ja) * | 2002-12-26 | 2004-07-22 | Sega Corp | 電子遊戯装置、電子遊戯用画像処理方法、それを実行するプログラム、及びそれを記憶した記憶媒体 |
| JP2004283419A (ja) * | 2003-03-24 | 2004-10-14 | Namco Ltd | ゲーム情報、情報記憶媒体及びゲーム装置 |
-
2005
- 2005-06-22 JP JP2005181356A patent/JP2007004318A/ja not_active Withdrawn
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1153563A (ja) * | 1997-07-31 | 1999-02-26 | Sony Corp | 姿勢検出ゲーム装置およびゲーム方法 |
| JPH1188910A (ja) * | 1997-09-02 | 1999-03-30 | Canon Inc | 3次元モデル生成装置、3次元モデル生成方法、3次元モデル生成プログラムを記録した媒体、3次元モデル再生装置、3次元モデル再生方法及び3次元モデル再生プログラムを記録した媒体 |
| JP2000020193A (ja) * | 1998-06-29 | 2000-01-21 | Toshiba Corp | 仮想物体制御方法および仮想物体制御装置および記録媒体 |
| JP2000172878A (ja) * | 1998-12-09 | 2000-06-23 | Sony Corp | 情報処理装置および情報処理方法、並びに提供媒体 |
| JP2003057007A (ja) * | 2001-08-10 | 2003-02-26 | Matsushita Electric Works Ltd | 距離画像を用いた人体検知方法 |
| JP2003296707A (ja) * | 2002-03-29 | 2003-10-17 | Toshiba Corp | 3次元オブジェクト生成装置及び方法 |
| JP2004202007A (ja) * | 2002-12-26 | 2004-07-22 | Sega Corp | 電子遊戯装置、電子遊戯用画像処理方法、それを実行するプログラム、及びそれを記憶した記憶媒体 |
| JP2004283419A (ja) * | 2003-03-24 | 2004-10-14 | Namco Ltd | ゲーム情報、情報記憶媒体及びゲーム装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010516153A (ja) * | 2007-01-14 | 2010-05-13 | マイクロソフト インターナショナル ホールディングス ビイ.ヴイ. | 画像処理のための方法、装置及びシステム |
| KR101526866B1 (ko) * | 2009-01-21 | 2015-06-10 | 삼성전자주식회사 | 깊이 정보를 이용한 깊이 노이즈 필터링 방법 및 장치 |
| JP2012527025A (ja) * | 2009-05-14 | 2012-11-01 | アルカテル−ルーセント | 物体の3次元モデルを生成する方法 |
| JP2011215920A (ja) * | 2010-03-31 | 2011-10-27 | Namco Bandai Games Inc | プログラム、情報記憶媒体及び画像生成システム |
| JP2013097806A (ja) * | 2011-11-01 | 2013-05-20 | Samsung Electronics Co Ltd | 映像処理装置及び方法 |
| CN105051792A (zh) * | 2012-12-26 | 2015-11-11 | 英特尔公司 | 用于使用深度映射和光源合成增强3d图像的设备 |
| JP2016505968A (ja) * | 2012-12-26 | 2016-02-25 | インテル・コーポレーション | 深度マッピング及び光源合成を用いる3d画像の向上のための装置 |
| US9536345B2 (en) | 2012-12-26 | 2017-01-03 | Intel Corporation | Apparatus for enhancement of 3-D images using depth mapping and light source synthesis |
| JP2015019346A (ja) * | 2013-06-12 | 2015-01-29 | 日本放送協会 | 視差画像生成装置 |
| JP2018055257A (ja) * | 2016-09-27 | 2018-04-05 | キヤノン株式会社 | 情報処理装置、およびその制御方法ならびにプログラム |
| CN111921199A (zh) * | 2020-08-25 | 2020-11-13 | 腾讯科技(深圳)有限公司 | 虚拟对象的状态检测方法、装置、终端及存储介质 |
| CN111921199B (zh) * | 2020-08-25 | 2023-09-26 | 腾讯科技(深圳)有限公司 | 虚拟对象的状态检测方法、装置、终端及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007004318A (ja) | 画像処理方法、画像処理を実行するためのプログラム、及び、当該プログラムが記憶された記憶媒体 | |
| US10293252B2 (en) | Image processing device, system and method based on position detection | |
| JP6548518B2 (ja) | 情報処理装置および情報処理方法 | |
| US9344707B2 (en) | Probabilistic and constraint based articulated model fitting | |
| JP5773944B2 (ja) | 情報処理装置および情報処理方法 | |
| EP2724318B1 (en) | Fully automatic dynamic articulated model calibration | |
| JP4473754B2 (ja) | 仮想試着装置 | |
| JP6587435B2 (ja) | 画像処理装置、情報処理方法及びプログラム | |
| WO2015122079A1 (ja) | 情報処理装置および情報処理方法 | |
| JP5251987B2 (ja) | 人判定装置、方法およびプログラム | |
| JP6189170B2 (ja) | 姿勢推定装置 | |
| KR20140019765A (ko) | 구조광 및 스테레오 비전에 기초한 깊이 카메라 | |
| JP6873344B2 (ja) | 疲労判定装置、疲労判定方法、および疲労判定プログラム | |
| JP3732757B2 (ja) | 画像認識方法および画像認識装置 | |
| CN111801725A (zh) | 图像显示控制装置及图像显示控制用程序 | |
| JP6300560B2 (ja) | 情報処理装置および情報処理方法 | |
| JP2010152557A (ja) | 画像処理装置および画像処理方法 | |
| JP2016525235A (ja) | 文字入力のための方法及びデバイス | |
| Xu et al. | Bare hand gesture recognition with a single color camera | |
| TW201928761A (zh) | 影像擷取之設備及方法 | |
| JP2004333505A (ja) | 情報抽出方法、情報抽出装置およびプログラム | |
| KR101909326B1 (ko) | 얼굴 모션 변화에 따른 삼각 매쉬 모델을 활용하는 사용자 인터페이스 제어 방법 및 시스템 | |
| JP5307060B2 (ja) | 画像処理装置、画像処理方法、ならびに、プログラム | |
| KR101050107B1 (ko) | 영상 제어 장치 | |
| JP7024876B2 (ja) | 検出装置、処理装置、検出方法、及び処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080623 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101005 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101019 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20101111 |