JP2006098403A - センサシステムおよびその動作方法 - Google Patents
センサシステムおよびその動作方法 Download PDFInfo
- Publication number
- JP2006098403A JP2006098403A JP2005279269A JP2005279269A JP2006098403A JP 2006098403 A JP2006098403 A JP 2006098403A JP 2005279269 A JP2005279269 A JP 2005279269A JP 2005279269 A JP2005279269 A JP 2005279269A JP 2006098403 A JP2006098403 A JP 2006098403A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- conductive elements
- operable
- probe
- output signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/24—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance
- G01D5/241—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance by relative movement of capacitor electrodes
- G01D5/2417—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance by relative movement of capacitor electrodes by varying separation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/14—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring distance or clearance between spaced objects or spaced apertures
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Electronic Switches (AREA)
Abstract
【解決手段】感知されたパラメータを表す出力信号を供給するように動作可能なセンサ(12)を備えるセンサシステム(10)が提供される。センサシステム(10)は、また、センサ(12)に結合された制御システム(20)を備え、この制御システム(20)は、感知されたパラメータを表す出力信号に基づいてセンサ(12)の物理特性を変えるように動作可能である。
【選択図】図1
Description
ここで、Cはキャパシタンス、
εは平行板間の媒体の誘電率、
Aは平行板間の重なり面積、そして、
Sは平行板の隔たりである。
以下でより詳細に議論するように、間隔制御システム28は、プローブ12から受け取られるキャパシタンス(C)を表す信号に基づいて、プローブ12と物体36の間の間隔(S)38を制御するように動作可能である。この実施形態では、間隔制御システム28は、上の式(2)および間隔制御システム28にプログラムされたデータを使用して、プローブ12と物体36の間の間隔(S)38を定めるように動作可能である。しかし、間隔制御システム28はただ単にキャパシタンス(C)を使用して、プローブ12と物体36の間の間隔(S)38を制御することができる。キャパシタンス(C)および/または間隔(S)は、キャパシタンスおよび/または間隔(S)の所望の値と比較される。この実施形態では、間隔制御システム28は、所望のキャパシタンス(C)または間隔(S)を維持するように物体36の変位を導くように動作可能である。
12 センサ(プローブ)
14、16、18 導電要素
30 導電要素(戻り経路)
20 プローブ制御システム
22、24、26 スイッチ
Claims (10)
- 感知されたパラメータを表す出力信号を供給するように動作可能なセンサ(12)と、
前記センサ(12)に結合された制御システム(20)と、を備えるセンサシステム(10)であって、前記制御システム(20)が、前記感知されたパラメータを表す前記出力信号に基づいて前記センサ(12)の物理特性を変えるように動作可能であるセンサシステム(10)。 - 前記センサ(12)が複数の導電要素(14)を備える、請求項1記載のシステム。
- 前記複数の導電要素の少なくとも1つ(30)が、前記センサ(12)を雑音および干渉から遮蔽するように動作可能である、請求項2記載のシステム。
- 前記複数の導電要素(14)の各々を前記センサ(12)の出力に選択的に結合するように動作可能な複数のスイッチ(22)をさらに備える、請求項2記載のシステム。
- 感知されたパラメータを表す出力信号を供給するように動作可能なセンサ(12)であって、複数の導電要素(14)と、前記複数の導電要素(14)の各々を前記センサ(12)の出力に選択的に結合するように動作可能な複数のスイッチ(22)とを備えるセンサ(12)、および、
前記複数のスイッチ(22)の各々を制御して、前記複数の導電要素(14)の各々を前記センサ(12)の出力に選択的に結合するように動作可能な制御システム(20)、を備えるセンサシステム(10)。 - センサ(12)の感知要素(14)と外部物体(36)の間の距離を表す出力信号を供給するように動作可能な前記センサ(12)を備えるセンサシステム(10)であって、前記感知要素(14)と前記外部物体(36)の間の距離を表す出力信号に基づいて前記感知要素(14)の面積を自動的に変えるように動作可能なセンサシステム(10)。
- 多レンジセンサ(12)であって、
パラメータを感知するように動作可能な複数の導電要素(14)と、
前記複数の導電要素(14)の各々を前記センサ(12)の出力に選択的に結合するように動作可能な複数のスイッチ(22)と、を備える多レンジセンサ(12)。 - センサシステムを動作させる方法であって、
センサによって感知されたパラメータを表す出力信号を受け取るステップと、
前記感知されたパラメータを表す出力信号に基づいて、前記センサの物理特性を制御するステップと、を備える方法。 - センサシステムを動作させる方法であって、
センサによって感知されたパラメータを表す出力信号を受け取るステップと、
前記感知されたパラメータを表す前記出力信号に基づいて、複数の導電要素を前記センサの出力に選択的に結合するステップと、を備える方法。 - センサシステムを動作させる方法であって、
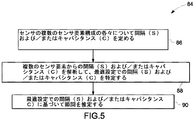
センサの複数の構成によって感知されたパラメータを表す複数の出力信号を受け取るステップと、
前記感知されたパラメータを表す前記複数の出力信号を解析するステップと、
前記感知されたパラメータの所望の範囲を測定するために前記センサの所望の構成を選択するステップと、を備える方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/951,562 US7332915B2 (en) | 2004-09-28 | 2004-09-28 | Sensor system and method of operating the same |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006098403A true JP2006098403A (ja) | 2006-04-13 |
| JP2006098403A5 JP2006098403A5 (ja) | 2008-11-13 |
Family
ID=35355727
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005279269A Pending JP2006098403A (ja) | 2004-09-28 | 2005-09-27 | センサシステムおよびその動作方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7332915B2 (ja) |
| EP (1) | EP1640687B1 (ja) |
| JP (1) | JP2006098403A (ja) |
| CA (1) | CA2519527C (ja) |
| DE (1) | DE602005004217T2 (ja) |
| RU (1) | RU2392651C2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007155734A (ja) * | 2005-12-06 | 2007-06-21 | General Electric Co <Ge> | マルチレンジ間隙測定システム及びそれを動作させる方法 |
| JP2010175539A (ja) * | 2009-01-27 | 2010-08-12 | General Electric Co <Ge> | センサパラメータダウンロードによるセンサの自動較正 |
| JP2010237144A (ja) * | 2009-03-31 | 2010-10-21 | Fujikura Ltd | 車両用障害物検出装置および歩行者保護用エアバッグ展開制御装置 |
| JP2011085549A (ja) * | 2009-10-19 | 2011-04-28 | Alps Electric Co Ltd | 静電容量式近接センサ装置、静電容量式モーション検出装置及びそれらを用いた入力装置 |
| JPWO2010050607A1 (ja) * | 2008-10-31 | 2012-03-29 | 株式会社フジクラ | 静電容量型センサ |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7466143B2 (en) * | 2005-09-16 | 2008-12-16 | General Electric Company | Clearance measurement systems and methods of operation |
| US7215129B1 (en) * | 2006-03-30 | 2007-05-08 | General Electric Company | Multi tip clearance measurement system and method of operation |
| US8615374B1 (en) | 2006-06-09 | 2013-12-24 | Rockwell Automation Technologies, Inc. | Modular, configurable, intelligent sensor system |
| US7404331B2 (en) * | 2006-09-27 | 2008-07-29 | General Electric Company | Sensor assembly, transformers and methods of manufacture |
| US7605595B2 (en) * | 2006-09-29 | 2009-10-20 | General Electric Company | System for clearance measurement and method of operating the same |
| US8177474B2 (en) * | 2007-06-26 | 2012-05-15 | General Electric Company | System and method for turbine engine clearance control with rub detection |
| DE102007047716A1 (de) | 2007-10-05 | 2009-04-09 | Robert Bosch Gmbh | Sensoreinrichtung zur kapazitiven Abstandsermittlung |
| US7994800B2 (en) * | 2008-03-25 | 2011-08-09 | General Electric Company | Systems and methods for online phase calibration |
| US7852092B2 (en) * | 2008-03-25 | 2010-12-14 | General Electric Company | Systems for inspection of shrouds |
| US8272246B2 (en) * | 2008-09-30 | 2012-09-25 | General Electric Company | Electronic self-calibration for sensor clearance |
| US8876460B2 (en) | 2011-08-11 | 2014-11-04 | General Electric Company | Method and apparatus for measuring turbine shell clearance |
| US8970228B2 (en) | 2012-05-31 | 2015-03-03 | General Electric Company | Rotational clearance measurement system and method of operation |
| US9417048B2 (en) | 2012-10-31 | 2016-08-16 | General Electric Company | Capacitive sensor device and method of manufacture |
| US9476318B2 (en) * | 2013-09-03 | 2016-10-25 | General Electric Company | Systems and methods to monitor a rotating component |
| US9587511B2 (en) | 2013-12-13 | 2017-03-07 | General Electric Company | Turbomachine cold clearance adjustment |
| CN113267343B (zh) * | 2021-04-26 | 2024-06-14 | 中国联合重型燃气轮机技术有限公司 | 燃气轮机试验设备 |
Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4955360U (ja) * | 1972-08-23 | 1974-05-16 | ||
| JPS5759101A (en) * | 1980-09-26 | 1982-04-09 | Hiromi Ogasawara | Noncontacting infinitesimal displacement gauge |
| JPS5914007U (ja) * | 1982-07-20 | 1984-01-27 | イ−グル工業株式会社 | 表面粗さ計 |
| JPS6280502A (ja) * | 1985-10-03 | 1987-04-14 | Stanley Electric Co Ltd | 静電容量型近接検出装置 |
| JPH04231802A (ja) * | 1990-05-29 | 1992-08-20 | General Electric Co <Ge> | 電気キャパシタンス間隙計 |
| JPH07198312A (ja) * | 1993-11-17 | 1995-08-01 | Soc Natl Etud Constr Mot Aviat <Snecma> | 回転式機械におけるロータ及びステータの対向面間距離を動的に測定する装置 |
| JPH07198309A (ja) * | 1991-06-11 | 1995-08-01 | Weidmueller Interface Gmbh & Co | 容量センサ装置 |
| JPH09203681A (ja) * | 1996-01-29 | 1997-08-05 | Fuji Electric Co Ltd | 圧力検出装置 |
| JPH09297174A (ja) * | 1996-05-02 | 1997-11-18 | Honda Motor Co Ltd | マルチビーム・レーダ装置 |
| JPH11258331A (ja) * | 1998-03-11 | 1999-09-24 | Mitsubishi Electric Corp | レーダ装置 |
| JP2000082658A (ja) * | 1998-09-04 | 2000-03-21 | Canon Inc | 面位置検出装置、露光装置およびデバイス製造方法 |
| JP2001094408A (ja) * | 1999-07-22 | 2001-04-06 | Sumitomo Metal Ind Ltd | 静電容量型センサ、静電容量型センサ部品および物体搭載体 |
| US6401541B1 (en) * | 1999-11-03 | 2002-06-11 | Kulite Semiconductor Products, Inc. | Multiple pressure sensing system |
| JP2003021566A (ja) * | 2001-07-10 | 2003-01-24 | Teijin Seiki Co Ltd | シリコンダイアフラム型真空圧力センサ装置およびその装置を用いた圧力測定方法 |
| JP2003028741A (ja) * | 2001-07-11 | 2003-01-29 | Toyota Central Res & Dev Lab Inc | 静電容量型センサ装置 |
| JP2005134131A (ja) * | 2003-10-28 | 2005-05-26 | Oki Electric Ind Co Ltd | 静電容量型距離測定装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU964437A2 (ru) | 1976-07-19 | 1982-10-07 | Институт Электродинамики Ан Усср | Емкостной трансформаторный мост дл измерени перемещений |
| US5119036A (en) | 1990-05-29 | 1992-06-02 | General Electric Company | Electrical capacitance clearanceometer |
| US5166626A (en) | 1990-05-29 | 1992-11-24 | General Electric Company | Electrical capacitance clearanceometer |
| JP3732919B2 (ja) * | 1996-12-19 | 2006-01-11 | トヨタ自動車株式会社 | 静電容量式角度検出装置 |
| US6441623B1 (en) * | 1999-07-29 | 2002-08-27 | Ab Automotive Electronics Ltd. | Capacitive proximity sensor for automotive use |
| US6593755B1 (en) * | 2000-07-31 | 2003-07-15 | Banner Engineering Corporation | Method and apparatus for detection sensor shielding |
| US6744264B2 (en) * | 2002-04-25 | 2004-06-01 | Motorola, Inc. | Testing circuit and method for MEMS sensor packaged with an integrated circuit |
| US6774642B2 (en) * | 2002-08-27 | 2004-08-10 | Delphi Technologies, Inc. | Capacitive angular position sensor |
| JP3858865B2 (ja) * | 2003-08-29 | 2006-12-20 | セイコーエプソン株式会社 | 静電容量検出装置 |
-
2004
- 2004-09-28 US US10/951,562 patent/US7332915B2/en not_active Expired - Lifetime
-
2005
- 2005-09-15 CA CA2519527A patent/CA2519527C/en not_active Expired - Fee Related
- 2005-09-26 DE DE602005004217T patent/DE602005004217T2/de active Active
- 2005-09-26 EP EP05255982A patent/EP1640687B1/en active Active
- 2005-09-27 RU RU2005130123/09A patent/RU2392651C2/ru not_active IP Right Cessation
- 2005-09-27 JP JP2005279269A patent/JP2006098403A/ja active Pending
Patent Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4955360U (ja) * | 1972-08-23 | 1974-05-16 | ||
| JPS5759101A (en) * | 1980-09-26 | 1982-04-09 | Hiromi Ogasawara | Noncontacting infinitesimal displacement gauge |
| JPS5914007U (ja) * | 1982-07-20 | 1984-01-27 | イ−グル工業株式会社 | 表面粗さ計 |
| JPS6280502A (ja) * | 1985-10-03 | 1987-04-14 | Stanley Electric Co Ltd | 静電容量型近接検出装置 |
| JPH04231802A (ja) * | 1990-05-29 | 1992-08-20 | General Electric Co <Ge> | 電気キャパシタンス間隙計 |
| JPH07198309A (ja) * | 1991-06-11 | 1995-08-01 | Weidmueller Interface Gmbh & Co | 容量センサ装置 |
| JPH07198312A (ja) * | 1993-11-17 | 1995-08-01 | Soc Natl Etud Constr Mot Aviat <Snecma> | 回転式機械におけるロータ及びステータの対向面間距離を動的に測定する装置 |
| JPH09203681A (ja) * | 1996-01-29 | 1997-08-05 | Fuji Electric Co Ltd | 圧力検出装置 |
| JPH09297174A (ja) * | 1996-05-02 | 1997-11-18 | Honda Motor Co Ltd | マルチビーム・レーダ装置 |
| JPH11258331A (ja) * | 1998-03-11 | 1999-09-24 | Mitsubishi Electric Corp | レーダ装置 |
| JP2000082658A (ja) * | 1998-09-04 | 2000-03-21 | Canon Inc | 面位置検出装置、露光装置およびデバイス製造方法 |
| JP2001094408A (ja) * | 1999-07-22 | 2001-04-06 | Sumitomo Metal Ind Ltd | 静電容量型センサ、静電容量型センサ部品および物体搭載体 |
| US6401541B1 (en) * | 1999-11-03 | 2002-06-11 | Kulite Semiconductor Products, Inc. | Multiple pressure sensing system |
| JP2003021566A (ja) * | 2001-07-10 | 2003-01-24 | Teijin Seiki Co Ltd | シリコンダイアフラム型真空圧力センサ装置およびその装置を用いた圧力測定方法 |
| JP2003028741A (ja) * | 2001-07-11 | 2003-01-29 | Toyota Central Res & Dev Lab Inc | 静電容量型センサ装置 |
| JP2005134131A (ja) * | 2003-10-28 | 2005-05-26 | Oki Electric Ind Co Ltd | 静電容量型距離測定装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007155734A (ja) * | 2005-12-06 | 2007-06-21 | General Electric Co <Ge> | マルチレンジ間隙測定システム及びそれを動作させる方法 |
| JPWO2010050607A1 (ja) * | 2008-10-31 | 2012-03-29 | 株式会社フジクラ | 静電容量型センサ |
| JP2010175539A (ja) * | 2009-01-27 | 2010-08-12 | General Electric Co <Ge> | センサパラメータダウンロードによるセンサの自動較正 |
| JP2010237144A (ja) * | 2009-03-31 | 2010-10-21 | Fujikura Ltd | 車両用障害物検出装置および歩行者保護用エアバッグ展開制御装置 |
| JP2011085549A (ja) * | 2009-10-19 | 2011-04-28 | Alps Electric Co Ltd | 静電容量式近接センサ装置、静電容量式モーション検出装置及びそれらを用いた入力装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2519527C (en) | 2014-03-04 |
| US7332915B2 (en) | 2008-02-19 |
| EP1640687B1 (en) | 2008-01-09 |
| RU2392651C2 (ru) | 2010-06-20 |
| US20060066318A1 (en) | 2006-03-30 |
| EP1640687A1 (en) | 2006-03-29 |
| CA2519527A1 (en) | 2006-03-28 |
| RU2005130123A (ru) | 2007-04-10 |
| DE602005004217T2 (de) | 2009-01-02 |
| DE602005004217D1 (de) | 2008-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006098403A (ja) | センサシステムおよびその動作方法 | |
| EP2211139B1 (en) | Automated sensor specific calibration through sensor parameter download | |
| EP1795861B1 (en) | Multi-range clearance measurement system and method of operation | |
| US7722310B2 (en) | System and method for measuring clearance between two objects | |
| JP4221210B2 (ja) | タービンブレード先端間隙を測定する方法及び装置 | |
| US8348504B2 (en) | Wireless temperature measurement system and methods of making and using same | |
| US9709376B2 (en) | High sensitivity inductive sensor for measuring blade tip clearance | |
| RU2231751C2 (ru) | Устройство для измерения зазоров на различных глубинах абразивного износа | |
| KR20070099440A (ko) | 멀티 팁 간극 측정 장치, 간극 측정 방법, 회전 장치 및멀티 팁 간극 측정 장치의 상태를 검지하는 방법 | |
| US7180305B2 (en) | Sensor systems and methods of operation | |
| CN110388990A (zh) | 一种用于发动机旋转部件温度测量的无线遥测系统 | |
| US9851324B1 (en) | Sensing apparatus and material sensing method | |
| Soto et al. | Real Time Condition Monitoring of Electric Propulsion and Generation System Using Passive Battery-Free RF Temperature Sensor | |
| CN206399994U (zh) | 一种高分辨率测量转换电路 | |
| EP3380815B1 (en) | Multi-mode sensor | |
| Ouyang et al. | Approximate engineering method for detection of magneto-resistive proximity sensor | |
| CN118687455A (zh) | 金属槽宽测量设备及方法 | |
| KR20230150302A (ko) | 고해상도 절대형 벡터 인코더 | |
| CN113375832A (zh) | 温度监测系统、方法、装置、电机设备及计算机存储介质 | |
| JP2006105666A (ja) | 妨害電磁波計測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080925 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080925 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101026 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110126 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110126 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20110126 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110726 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20111025 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20111028 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120814 |