JP2006034323A - 薬液定量自動注入装置及びその注入制御方法 - Google Patents
薬液定量自動注入装置及びその注入制御方法 Download PDFInfo
- Publication number
- JP2006034323A JP2006034323A JP2004214192A JP2004214192A JP2006034323A JP 2006034323 A JP2006034323 A JP 2006034323A JP 2004214192 A JP2004214192 A JP 2004214192A JP 2004214192 A JP2004214192 A JP 2004214192A JP 2006034323 A JP2006034323 A JP 2006034323A
- Authority
- JP
- Japan
- Prior art keywords
- injection
- mode
- chemical
- motor
- chemical solution
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






















Landscapes
- Infusion, Injection, And Reservoir Apparatuses (AREA)
Abstract
【課題】患者が容易に操作できて時間と場所に関係なく、定量ずつ薬液を自動に注入できる薬液定量自動注入装置及びその注入制御方法を提供する。
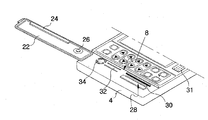
【解決手段】内部に3個の隔室がそれぞれ分離されており、その外部を支持するハウジング4と、ハウジングの最上端に隔室で構成され、薬液パックを格納する薬液貯蔵室6と、薬液の注入量や時間間隔を設定するボタン部10と、その設定状態が画面表示されるLCD11を備えており、内部には各種回路素子が装着された回路基板が内設される制御室と、制御室の下端に配設され、薬液を圧送してチューブを通した薬液の排出を駆動するための圧力ポンプが内設されており、圧力ポンプの駆動制御を通じて薬液の投入状態を断続するための駆動室12と、追加の薬液投入命令信号を発生するボウラススイッチ14と、駆動室の内部から外部に延びて薬液パックから排出される薬液を針に移送するチューブ16とを含む構成とする。
【選択図】図1
【解決手段】内部に3個の隔室がそれぞれ分離されており、その外部を支持するハウジング4と、ハウジングの最上端に隔室で構成され、薬液パックを格納する薬液貯蔵室6と、薬液の注入量や時間間隔を設定するボタン部10と、その設定状態が画面表示されるLCD11を備えており、内部には各種回路素子が装着された回路基板が内設される制御室と、制御室の下端に配設され、薬液を圧送してチューブを通した薬液の排出を駆動するための圧力ポンプが内設されており、圧力ポンプの駆動制御を通じて薬液の投入状態を断続するための駆動室12と、追加の薬液投入命令信号を発生するボウラススイッチ14と、駆動室の内部から外部に延びて薬液パックから排出される薬液を針に移送するチューブ16とを含む構成とする。
【選択図】図1
Description
本発明は薬液定量自動注入装置及びその注入制御方法に関するもので、より詳細には、薬液貯蔵室と制御室、投入断続などを電子制御で行い、モーターの回転数によりその投入量が既設定された定量を常時維持するようにし、患者が容易に操作できて時間と場所に関係なく、定量ずつ薬液を自動で注入できる薬液定量自動注入装置及びその注入制御方法に関するものである。
周知のように、従来は、患者に注入する薬量を医師が処方すれば、看護婦は医師の処方に従って薬液容器を患者の注射位置より高い位置に固定させて、経験により捻りネジになっている開閉部が内蔵された弁を調節し、一定量の注射液が患者に投入されるようになっている。
しかし、鎮痛剤などの薬液を患者に注射する場合、間歇的にけいれんや鎮痛が起きる場合が多いので、そのような場合には注射量を一時的に増加させなければならない。この時、注射量の注入は専門家の医師が処方した量に基づいて薬液を投入しなければならないので患者自らその注射量を調節すれば、相当危険である。しかし、病院の環境によっては、間歇的な苦痛に対応して速かに医師や看護婦が薬液の注入量を調節することが非常に難しく、医師や看護婦も時間的な浪費を招く問題がある。
特に、注射液の投与時に未熟な看護婦の場合には、処方の通り薬液が正確に定量で注入されるように、時間当り注射量を調節するのが難しい問題がある。普段は注射をしていないが特殊な疾患の発病時にだけ注射をしてもらう患者の場合、たとえば、急性心臓発作症状などを有する患者の場合には、迅速な薬液の注入を必要とするので、個人が常時薬液を携帯しなければならず、注射時には正確に定量を注射しなければならないため、多くの難しさがある。
また、熟練者であったとしても、失敗して薬液を超過投入する危険性が常存しており、薬液に異質物や空気が含まれていたり、チューブが他の物により付勢されて薬液の供給が遮断された場合、患者に危険を与える問題がある。
このような従来技術の問題点に鑑みてなされた本発明は、薬液貯蔵室と制御室、投入断続などを電子制御で行い、モーターの回転数によりその投入量が既設定された定量を常時維持するようにし、患者が容易に操作できて時間と場所に関係なく、定量ずつ薬液を自動で注入できる薬液定量自動注入装置及びその注入制御方法を提供することにその目的がある。
本発明の他の目的は薬液を定量ずつ自動注入しながらその薬液の注入状態を最適化し、最上の安全性を確保しながら薬液を注入するために、ドア検知、エアー検知、詰まり検知、モーター回転数検知を通した既設定アルゴリズムによって微細な計画制御が可能なようにして、患者自ら安全且つ容易に薬液を注入できる薬液定量自動注入装置及びその注入制御方法を提供することにある。
前述した目的を達成するために、本発明の薬液定量自動注入装置は、内部に3個の隔室がそれぞれ分離されており、その外部を支持するためのハウジングと;前記ハウジングの最上端に隔室で構成され、内部に薬液パックを格納する薬液貯蔵室と;その薬液貯蔵室の下端に配設され、薬液の注入量や時間間隔を設定するボタン部と、その設定状態が画面表示されるLCDを備えており、内部には各種回路素子が装着された回路基板が内設される制御室と;前記制御室の下端に配設され、薬液を圧送してチューブを通した薬液の排出を駆動するための圧力ポンプが内設されており、前記圧力ポンプの駆動制御を通じて薬液の投入状態を断続するための駆動室と;電線を介して前記ハウジングの側面の所定部に連結されて追加の薬液投入命令信号を発生するボウラススイッチと;前記駆動室の内部から外部に延びて前記薬液パックから排出される薬液を針に移送するチューブと;を含むことを特徴とする。
ここで、前記駆動室内部のハウジングの上部にはチューブが載置されるガイド溝が形成され、圧力ポンプが備わって、そのガイド溝と圧力ポンプを上部から受納するためのカバーがヒンジにより開閉自在に結びついており、チューブの中間所定部には薬液注入を断続する逆止弁が載置される逆止弁載置溝が形成されることがいい。
また、前記カバーの下面には前記圧力ポンプに対してチューブを付勢するための一定長さの支持台が突設されており、前記逆止弁を付勢して薬液を注入させる付勢突起が突設されていることがいい。
さらに、前記圧力ポンプは、ハウジングの上面に形成された凹溝に挿設され、その上面がU状になった複数の中央部が穿孔され、その上面にはチューブが載置される付勢片と;その付勢片の中央部に形成されたカム孔に嵌入され、外周縁にはスクリューが形成されたカムと;前記カムに駆動力を提供するモーターと;前記カム軸とモーター軸を連結し、軸整列が所定角度の範囲内でずれていても動力伝達が可能なスプリングと;からなることが好ましい。
さらに、前記付勢片は、カムにより隣接した付勢片に連結されてカムの駆動時サイン波の形態で上昇及び下降しながらチューブを付勢することによって、薬液を移送することが好ましい。
またさらに、前記逆止弁にはその両端にそれぞれ装置内部から薬液を移送するメーンチューブ及び装置外部に薬液を排出する排出チューブが連結され、内部には開閉部材が受容されるハウジングと;前記ハウジングの中央空間部に位置して上下移動しながらハウジングの両端の流路を開閉するように外周縁がテーパーになった開閉部材と;からなることが好ましい。
また、本発明の一側面に係るマルチセンサーが内設された薬液定量自動注入装置は、内部に3個の隔室がそれぞれ分離されており、その外部を支持するためのハウジングと;前記ハウジングの上端に隔室で構成され、内部に薬液パックを格納する薬液貯蔵室と;薬液を圧送してチューブを通した薬液の排出を駆動するための圧力ポンプが内設され、薬液の投入状態を断続するための駆動室と;電線を介して前記ハウジングの側面の所定部に連結されて追加の薬液投入命令信号を発生するボウラススイッチと;前記駆動室の内部から外部に延びて前記薬液パックから排出される薬液を針に移送させるチューブと;前記チューブの中間部にその逆止弁ハウジングの両端がそれぞれ連結されており、内部空間に開閉部材が受容され、その開閉部材が上下移動することによって、薬液注入を断続する逆止弁と;からなる薬液定量自動注入装置において、前記逆止弁の下部支持面に付着されて逆止弁ハウジングの内圧の変化により膨縮するメンブレインと;前記メンブレインの裏面に付着されてメンブレインの膨脹時ハイ信号を発生することによって、チューブの詰まりを検知する詰まり検知センサーと;前記ハウジングの下面に設けられ、チューブ受納用カバー部の閉鎖状態を検知してハイ信号を発生するドア検知センサーと;前記チューブの装着面の下部に配設されて薬液注入時ハイ信号を発生し、エアーの含有時ロー信号を発生してエアーを検知するエアー検知センサーと;前記詰まり検知センサーと、ドア検知センサー、エアー検知センサーから印加される検知信号の中で異常状態の信号が発生する時、圧縮ポンプの駆動を停止させる制御部と;を含むことを特徴とする。
ここで、前記詰まり検知センサー、ドア検知センサー、及びエアー検知センサーは、液体、金属、皮膚の近接時ハイ信号を発生する近接センサーであることがいい。
また、前記駆動室は、その内部に前記圧縮ポンプを駆動するモーターの回転数を検知するためのモーター回転数検知センサーをさらに含むことがいい。
さらに、前記突出回転部には磁石が装着されており、前記モーター回転数検知センサーはホールセンサーとしてモーター軸の回転状態を検知することが好ましい。
また、本発明の他の側面に係る薬液定量自動注入装置は、患者に薬液を定量ずつ自動注入するために注入モードを選択するモード選択ボタンと、薬液の注入開始及び停止を選択する開始/停止選択ボタンと、注入量の加減設定のための加減選択ボタンを備えるボタン部と;患者セルフコントロール(PCA)モードにおける自操薬液追加注入を操作するためのボウラススイッチと;載置されたチューブを受納するカバーの閉鎖状態を検知するためのドア検知センサーと;チューブの内部にエアーの含有可否を検知するためのエアー検知センサーと;チューブの閉塞状態を検知するための詰まり検知センサーと;圧力ポンプを駆動するモーター及びモーター駆動部と;前記ボタン部で操作したモード選択や薬液注入の加減量、注入停止や注入開始状態を患者が認知できるようにディスプレーするLCD及びこれを駆動するためのLCD駆動部と;からなる薬液定量注入装置において、前記モーターの回転数を検知するためのエンコーダーと;注入状態の以上を警告するためのブザー及びこれを駆動するためのブザー駆動部と;薬液連続注入モード、患者セルフコントロール(PCA)モード、間歇(Intermittent)モード、完全非経口栄養法(TPN)モード、多段階(Multi−step)モードによる薬液注入アルゴリズムが格納されているデータ格納部と;前記ボタン部に備わった各ボタンの入力による信号を受信して前記データ格納部に既格納された当該モードアルゴリズムを実行し、注入モード時にはモーターの回転数を検出してモーターの駆動制御を行い、各センサーから検知信号を受信して以上有無を確認し、以上の発生時前記モーターが停止すると同時にブザーが駆動されるように制御を行う制御部と;を含むことを特徴とする。
さらに、本発明の他の側面に係る薬液定量自動注入制御方法は、薬液を定量ずつ自動注入するための薬液定量自動注入制御方法において、電源を印加するステップと;初期に自家テストするステップと;初期モードを実行するステップと;既設定モードの選択可否を判断するステップと;注入モードを選択するステップと;注入モード準備を行うステップと;薬液注入を駆動するステップと;終了約10分前を知らせるステップと;終了コードが発生するステップと;動作中で流速を再設定するステップと;モーターの駆動に連貫してエラーをチェックするステップと;薬液注入を停止するステップと;を含むことを特徴とする。
ここで、前記薬液注入モードは、初期の薬液注入開始から終了までの駆動時間の間、既設定された定量の薬液を持続的に注入する連続注入モードと;連続モードにおける定量の薬液にさらに一定量の薬液を注入させる患者セルフコントロール(PCA)モードと;初期の薬液注入開始から終了まで一定の注入時間と一時停止時間がそれぞれ予め設定され、注入時間時注入量が予め設定されて注入と停止を繰り返して実行しながら薬液を注入する間歇モードと;初期薬液注入開始から一定時間は注入される薬液が漸増するようにし、一定時間は一定量の薬液が注入されるようにし、一定時間は注入される薬液量が漸減するようにする完全非経口栄養法モードと;多段階の時間単位に分割して各時間単位別に一定量の薬液注入を設定する多段階モードと;からなることがいい。
また、前記初期モード実行ステップは、ボウラススイッチが操作されるかを判断し、ボウラススイッチが操作されると、圧力検知センサー及びドア検知センサーをチェックしてモーターを駆動させ、ボウラススイッチが操作されないと、ボウラス操作以前のモードを維持するステップであることがいい。
また、前記注入モードを選択するステップでは全体の注入量と注入速度を共通的に選択し、患者自操追加注入モードではボウラススイッチ操作時の注入量と注入速度、ロックアウトタイムをさらに選択し、間歇モードでは薬液注入時間、注入停止時間をさらに選択し、完全非経口栄養法モードでは漸増時間、漸減時間をさらに選択し、多段階モードでは注入段階をさらに選択することが好ましい。
さらに、前記注入モード準備を行うステップは、エアー検知センサー、圧力検知センサー及びドア検知センサーをチェックしてエラーの発生可否をチェックし、試験警報を発生するステップであることが好ましい。
さらに、モーターが停止して一定時間経過後に、モーターの駆動とは無関係でエンコーダーとホールセンサーの入力電源をオフしてバッテリーの長時間使用を可能にするステップをさらに含むことが好ましい。
またさらに、前記薬液注入を駆動するステップは、オン、オフ制御やPWM制御またはPID制御を通じてモーターを駆動させ、モーター駆動による回転時エンコーダーとホールセンサーを利用してパルス数を検出して既設定回転数と比較し、回転数の超過や減少時既設定回転数に補正するステップであることが好ましい。
本発明に係る薬液定量自動注入装置及びその注入制御方法は、患者自ら常時携帯しながら、時間と場所に拘束されず、予め設定した量の薬液を定量ずつ自動注入することができるので、非常に便利であり、特に患者が痛みを感じる時は、自らボタンを押して追加に薬液を注入できるので、便宜性が高い。また、カムとスプリング連結部材を利用して、振動が激しい場所でも正確にモーターの回転力を伝達して定量で薬液を投入できる。
また、チューブの閉塞状態を検知する詰まり検知センサーと、チューブの正確な受納状態を検知するドア検知センサー、チューブ内部のエアーを検知するエアー検知センサーと、モーターの既設定回転数の維持状態を検出するモーター回転数検知センサーから発生した検知信号に基づいて薬液の注入を制御することによって、より正確で、且つ安全な薬液注入が可能である。
さらに、モーターの回転数を注入速度と連動してチェックし、異常発生時、薬液の注入を停止して回転数を比較することによって、エラーを補正し、各種センサーを利用して薬液注入動作中の異常有無を随時チェックできる。
以下、添付図面を参照して本発明の好ましい実施形態について詳細に説明する。
図1は本発明の実施形態に係る薬液定量自動注入装置の構成を示す斜視図である。
これを参照すれば、本発明の一実施形態に係る薬液定量自動注入装置2は、装置の外形をなすハウジング4が提供されており、このハウジング4は3個の隔室に区分されている。3個の隔室の中で最上段の隔室は薬液パックが格納される薬液貯蔵室6であり、その下段には薬液の注入量や注入周期を制御して、その設定状態が画面にディスプレーされるLCD11が付着した制御室8が備わる。
これを参照すれば、本発明の一実施形態に係る薬液定量自動注入装置2は、装置の外形をなすハウジング4が提供されており、このハウジング4は3個の隔室に区分されている。3個の隔室の中で最上段の隔室は薬液パックが格納される薬液貯蔵室6であり、その下段には薬液の注入量や注入周期を制御して、その設定状態が画面にディスプレーされるLCD11が付着した制御室8が備わる。
また、制御室8の下段には薬液を圧送してチューブ16を通じて排出して、薬液の投入を断続するための駆動室12が提供されている。
一方、ハウジング4の側面の所定位置には電線を介してボウラススイッチ14が連結される。使用者はこのボウラススイッチ14を操作して一時的に薬液投入量を増加させることができる。また、注射針20とチューブ16との中間部にはエアフィルター18が配置される。エアフィルター18はチューブ16を通じて流動される薬液中に含まれていた空気をろ過して外部に排出させる。制御室8の外部にはキー操作を通じて各種設定を変更するボタン部10が備わる。
したがって、患者はマルチセンサーが内設された薬液注入装置2を常時携帯しながら時間と場所に拘らずに、予め設定した定量の薬液が投入できるので、非常に便利であり、薬液投入に対する患者の安全を確保するために各種センサーを有機的に結合して薬液投入が制御できるので、日常生活でも別途に看病人が必要ない。
図2は本発明の一実施形態に係る薬液定量自動注入装置の圧力ポンプ及び断続部材を示す斜視図である。
これを参照すれば、本発明の一実施形態に係る薬液定量自動注入装置2は、薬液の投入制御信号を受信して薬液が投入できるように駆動力を発生する駆動室12がハウジング4の下部に備わる。この駆動室12の上面にはドア22がヒンジにより開閉自在に結びついており、ドア22の下面にはチューブ16を付勢するために一定長さで突出した支持台24と、チューブ16に構成された逆止弁を開放状態で維持するために付勢する付勢突起26がそれぞれ備わっている。
駆動室12の内部には圧力ポンプ28が備わる。この圧力ポンプ28は電気制御により一定回転数の回転駆動力を発生するモーター(図示せず)と、このモーターの回転駆動力によって上下に移動自在に、横方向で結びつく複数の付勢片30からなる。
また、付勢片30はカム(図4aの42)の回転力によりサイン波の形態で上下移動する。したがって、付勢片30はメーンチューブ(図6の36)の下面をサイン派の形態で付勢して、これを通じてチューブ16内の薬液は一方向に流動する。
一方、駆動室12のドア22が結びつくハウジング4の上面にはチューブ16を内部に装着した状態でそのチューブ16をガイドするためのガイド溝32が形成されており、その側部には薬液断続弁が載置される載置溝34が形成されている。
図3は本発明の一実施形態に係る薬液定量自動注入装置の圧力ポンプを示す側断面図であり、図4a、4bは本発明の一実施形態に係る薬液定量自動注入装置のカム及びその軸結合状態を示す図面であり、図5は本発明の一実施形態に係る薬液定量自動注入装置の圧送状態を示す模式図である。
これらの図面に示すように、本発明の一実施形態に係る薬液定量自動注入装置2の圧力ポンプ28は、複数の付勢片30が並列に隣接するように配設された状態でハウジング4の上面に形成された溝に挿設されており、各付勢片30の中央部にはカム孔30aが形成されている。そのカム孔30aにはカム42のカム軸44が挿設される。付勢片30はU状で形成されており、上部の凹部にはメーンチューブ36が載置され、カバー22の下面に形成された支持台24によりメーンチューブ36の上面を一定に付勢するように構成されている。
そして、カム42のカム軸44は回転駆動力を発生するモーター(図示せず)の軸38に連結される。カム42はその外周面にスクリューが形成されており、そのカム42が複数の付勢片30のカム孔30aに長手方向に挿設されている。したがって、モーターによりカム42が回転すれば、付勢片30はカム42の外周面に形成されたスクリューに沿って上下に運動する。この時の運動軌跡は、サイン波の形態で現れる。
本発明の一実施形態において、カム軸44とモーター軸38連結する結合部材として、図4a及び図4bに示すようなスプリング40を利用する。スプリング40はその両端がそれぞれカム軸44とモーター軸38に連結されている。また、図4bに示すようにその軸線が所定の角度α範囲内でずれてもモーターの回転力をカム42に正確に伝達できる。
したがって、モーターによりカム42が回転すれば、付勢片30はカム42の外形に連動して上下に運動し、この時の運動軌跡は図5に示すようなサイン波の形態になって、メーンチューブ36内に存在する薬液を一方向に移動させる。
図6は本発明の一実施形態に係る薬液定量自動注入装置の断続部材を示す側断面図である。
本発明の一実施形態において、薬液定量自動注入装置2の断続部材としては、逆止弁50を利用する。その逆止弁50は、その両端にメーンチューブ36と排出チューブ16がそれぞれ連結され、内部には薬液の流れを断続する弁ハウジング52が配設される。その弁ハウジング52は逆止弁載置溝(図2の34)に載置されて付勢突起26により付勢されるようになる。弁ハウジング52の両端から延びた延長端にはそれぞれメーンチューブ36と排出チューブ16の一端が連結される。
弁ハウジング52の内部にはシリコンパッキングでできた開閉部材54が配設される。その開閉部材54はテーパーになった形態であり、弁ハウジング52の内部で上下に移動しながら流路を開閉する。より詳細には、弁ハウジング52を通じて一側から流入する薬液は、開閉部材の下部を通過して排出チューブ16に流出するように構成されているので、薬液パック(図示せず)に連結したメーンチューブ36の方から薬液が流入する状態で付勢突起26がその開閉部材54の上面を付勢しない場合は、弁ハウジング52の内部に流入した薬液により開閉部材54が上方に押し上げながら側面開口部を遮断する。したがって、薬液は排出チューブ16に排出されないようになる。
その反面に、カバー22がハウジング4に結びついて開閉部材54の上面を付勢突起26が付勢すれば、開閉部材54は下方に押し下げながら、弁ハウジング52の内側面の流路と開閉部材54との間にはギャップが形成されて薬液がメーンチューブ36から排出チューブ16に移動できるようになる。62はチューブ16の詰まり可否を検知するための詰まり検知センサーであり、その説明は後述する。
次は、前述した構成を有する本発明の一実施形態に係る薬液定量自動注入装置の機能と作用について説明する。まず、患者が投入しようとする薬液パックを本発明の一実施形態に係る薬液定量自動注入装置2の薬液貯蔵室6に格納すると共に、駆動室12のカバー22を開放してメーンチューブ36を圧力ポンプ28及びガード溝32に挿設する。次に、逆止弁50を逆止弁載置溝34に載置してカバー22を閉じる。
カバー22を閉じた後、ボタン部10を操作してパワーをターンオンし、各種投入量設定及びタイマー設定などを行い、その設定データはLCD11を通じて確認する。その次、針20を患者の身体の一部分に刺した後、ボタン部10に設けられた開始ボタン(図示せず)を操作すれば、薬液投入が開始される。
この時、カバー22を閉じれば、そのカバー22の下面に突設された支持台24により圧力ポンプ28の内部に挿設されたメーンチューブ36の上面が付勢されると共に、支持台24の下面に形成された付勢突起26により逆止弁載置溝34に載置した逆止弁50の開閉部材54の上面が付勢されることによって、メーンチューブ36から排出チューブ16への薬液の排出が可能な状態になる。
患者が開始ボタンを操作すれば、モーターが駆動され、そのモーターの駆動力はカム42の方に伝えられる。カム42が回転しながら、複数の付勢片30がカム42の外周縁の形状によって上下に運動する。
この時、カム軸44とモーター軸38は、スプリング40により互いに連結されているので、両軸の軸線が所定の角度α範囲内で少しずれても駆動力を正確に伝えられるようになる。
また、薬液定量自動注入装置2のハウジング4の側面には電線を介してボウラススイッチ14が装着されている。このボウラススイッチ14をキー操作すれば、予め設定した薬液投入量値に基づいてモーターの回転数が可変する。モーターは一般的にDCモーターやリニアモーターを使用してその回転数を電流制御することによって、正確な回転力の制御が可能になる。
以下、添付図面を参照して多様なセンサーを適用した本発明の薬液自動注入装置について詳細に説明する。
図7a、7b、図8a、8b、図9a、9bは本発明の実施形態に係る薬液定量自動注入装置のドア検知センサーを示す側断面図である。
これを参照すれば、本発明の一実施形態に係る薬液定量自動注入装置2においては、ドア検知センサー、エアー検知センサー、詰まり検知センサーを使用する。
ドア検知センサー、エアー検知センサー、詰まり検知センサーはいずれも、いわゆる近接センサーと呼ばれるセンサーを使用する。すなわち、これらのセンサーから一定距離以内に被測定体が位置すれば、そのセンサーと被測定体との間のキャパシタンス(電気容量)が変化するので、キャパシタンスの変化によって反応する信号値により被測定体の存在有無を検出する。
たとえば、キャパシタンスが比較的高い物質としては液体、金属及び、人の皮膚などがあり、これらの物質に対してはセンサーの出力信号がハイ、すなわちデジタル信号で"1"が出力される。反面に、キャパシタンスが比較的低い物質としてはエアー、プラスチックなどがあり、これらの物質に対してはセンサーの出力信号がロー、すなわちデジタル信号で"0"が出力される。このような近接センサーはその消耗電力が低いので、携帯型電源などで使用するのに適切である。
図7a、7bにおいて、ドア検知センサー60は、ハウジング4に対するカバー(図2の22)の閉鎖状態を検知するためにハウジング4の内壁面に設けられる。図7aに示すようにカバー22が閉じながらドア検知センサー60に近接すれば、金属体でなったカバー22とドア検知センサー60との間に形成されるキャパシタ値が変化しながら、ドア検知センサー60の出力値はハイ信号の"1"が出力される。
一方、この時、金属体でなったカバー22が図7bに示すように、ドア検知センサー60から離間すれば、ドア検知センサー60の出力値はロー信号の"0"が出力される。
図8a、8bは本発明の別の一実施形態に係る薬液定量自動注入装置のエアー検知センサーを示す側断面図である。
これを参照すれば、本発明の一実施形態に係る薬液定量自動注入装置2のエアー検知センサー62は、チューブ16の下の所定部に配設される。好ましくは、ハウジング4の上面において、チューブ16が装着されるガイド溝32の下端などに配設してもよい。
チューブ16の下端に配設したエアー検知センサー62は、チューブ16を通じて移動する薬液内にエアー66が含まれているかどうかを検知する。すなわち、チューブ16内に薬液だけ流動する場合、エアー検知センサー62の出力値はハイ信号の"1"が出力される。反面に、チューブ16内にエアーが含まれて流動する場合、エアー検知センサー62の出力値はロー信号の"0"が出力される。
万一、チューブ16内でエアーが検出される場合、薬液定量自動注入装置2の制御室8に備わったマイクロプロセッサ(図示せず)により圧力ポンプ28の駆動が停止して薬液の注入が停止する。
図9a、9bは本発明のさらに別の一実施形態に係る薬液定量自動注入装置の詰まり検知センサーを示す側断面図である。
これを参照すれば、本発明の一実施形態に係る薬液定量自動注入装置2の詰まり検知センサー63は、薬液注入の断続部材の逆止弁の下面に配設される。前述したように、逆止弁は、その両端にメーンチューブ36と排出チューブ16がそれぞれ連結され、内部には薬液の流れを断続する弁ハウジング52が備わる。その弁ハウジング52は逆止弁載置溝(図2の34)に載置されて付勢突起26により付勢される。
弁ハウジング52の内部中央空間部70は、その両側にそれぞれメーンチューブ36と排出チューブ16が連結される延長端が位置し、その中央空間部70にはシリコンパッキングでなった開閉部材54が介装する。その開閉部材54はテーパーになった形態であり、弁ハウジング52内部で上下運動しながら流路を開閉する。より詳細には、弁ハウジング52を通じて一側から流入する薬液は、開閉部材54の下部を通過して排出チューブ16に流出される構成であるため、薬液パック(図示せず)に連結したメーンチューブ36の方から薬液が流入する状態で付勢突起26がその開閉部材54の上面を付勢しなければ、弁ハウジング52内部に流入した薬液が開閉部材54を上面に押し上げてその側面開口部を遮断する。したがって、薬液が排出チューブ16に排出されない。
反面に、カバー22がハウジング4に装着されて付勢突起26により開閉部材54の上面が付勢されれば、開閉部材54は下方に押し下げれ、弁ハウジング52の内側面の流路と開閉部材54との間にはギャップが形成されて薬液がメーンチューブ36から排出チューブ16に移動できる。
この時、逆止弁が載置されるハウジング4の上面支持板4aには凹部4bが形成されており、その凹部4bの下面には詰まり検知センサー63が付着している。そして、空間部70と凹部4bとの間にはメンブレイン68が介装されていて、2個の空間を隔離する。
もし、薬液パック(図示せず)に連結したメーンチューブ36から逆止弁ハウジング52の空間部70を経由して排出チューブ16を通じて薬液が正常に流動する時は、空間部70に加えられる圧力が正常であるので、その下端に内設されたメンブレイン68は図9aに示すように下部の凹部4bの方に膨脹しない。したがって、この場合に詰まり検知センサー63からの出力値はロー信号の"0"が出力される。
反面に、図9bに示すように、患者側のチューブがふさがったり閉塞された場合は、逆止弁の空間部70に薬液による圧力上昇が発生する。空間部70の圧力上昇によりメンブレイン68はその下方の凹部4bの方に膨脹することによって、詰まり検知センサー63に近接する。この時、詰まり検知センサー63からの出力値はハイ信号の"1"が出力される。
この場合は、薬液定量自動注入装置2の制御室8に備わったマイクロプロセッサ(図示せず)により圧力ポンプ28の駆動が停止して薬液注入が停止し、チューブ詰まりを知らせる警報を発する。
図10は本発明の一実施形態に係る薬液定量自動注入装置のモーター回転数検知センサーを示す側断面図である。
図10に示すように、本発明の一実施形態に係る薬液定量自動注入装置2においては、内設したモーター回転数検知センサー72によって圧力ポンプ28に駆動力を発生させるモーター(図示せず)の回転数を検出する。
モーターの回転数は回転速度を決定し、その回転速度は薬液の注入速度を決定するので、一定時間間隔にモーターの回転速度を検出して既設定された速度で回転するかどうかをチェックしなければならない。モーターは自体運動エネルギーにより加速度が形成され、既設定された速度より早く回転する可能性もあるためである。
そのために、本発明の一実施形態に係る薬液定量自動注入装置2においては、圧力ポンプ28の付勢片30に形成されたカム孔30aに挿設されるカム42のカム軸44と、そのカム軸44に駆動力を伝達するモーター軸38をスプリング部材40で連結することによって、少し軸整列がずれても正確に動力が伝えられるようになる。
また、本発明の一実施形態に係る薬液定量自動注入装置2においては、スプリング部材40の一端に、スプリング部材40から垂直に延びた突出回転部40aを形成してモーター軸38と同一な回転軸上で回転するようにする。そして、その突出回転部40aから一定距離で離間した位置には、モーター回転数検知センサー72を装着する。好ましくは、突出回転部40aに磁石を固着し、モーター回転数検知センサー72にはホールセンサーを設けてモーター軸38の回転数を検知する。
したがって、モーター軸38が回転する回転力と同一に突出回転部40aが回転しながら、モーター回転数検知センサー72に対して近接したり離間することによって、モーター回転数検知センサー72から発生する出力値が可変される。
たとえば、モーター軸38の回転により突出回転部40aがモーター回転数検知センサー72に接近すれば、そのモーター回転数検知センサー72の出力値はハイ信号の"1"が出力される。反対に、モーター軸38の回転により突出回転部40aがモーター回転数検知センサー72から遠ざかれば、そのモーター回転数検知センサー72の出力値はロー信号の"0"が出力される。
したがって、この場合、薬液定量自動注入装置2の制御室8に備わったマイクロプロセッサ(図示せず)は、モーター回転数検知センサー72から伝送された信号を演算して既設定された注入速度(高速度注入、中速度注入、低速度注入)の範囲内でモーターが回転しているかを判断し、モーターの回転速度が既設定速度と相異なる場合は、圧力ポンプ28のモーター駆動を停止させて薬液注入を停止し、そのエラー値を補正して初期化する。
次は、添付図面を参照して本発明の実施形態に係る薬液定量自動注入装置のアルゴリズムについて詳細に説明する。
次は、添付図面を参照して本発明の実施形態に係る薬液定量自動注入装置のアルゴリズムについて詳細に説明する。
図11a〜11eは本発明の一実施形態に係る薬液定量自動注入装置を利用した各モード別時間プロファイルを示す図面である。
図11a〜11eに示すように、薬液定量自動注入装置2により選択して注入できる薬液注入モードは、連続(Continuous)モード、患者セルフコントロール(PCA)モード、間歇(Intermittent)モード、完全非経口栄養法(TPN)モード、多段階(Multi−step)モードに大別される。
本発明において、連続モードは、初期の薬液注入開始から終了時までの駆動時間間、既設定された定量の薬液が持続的に注入されるモードである。
また、患者セルフコントロールモードは、初期薬液の注入開始から一定時間、既設定された量の薬液が注入された後、さらに既設定された注入駆動時間間、連続モードと同様に定量の薬液が注入終了時まで注入されるモードである。この時、ボウラススイッチ14を患者が操作すれば、連続モードで定量ずつ注入される薬液に薬液が追加され、薬液がさらに追加で注入されるモードである。すなわち、患者が苦痛状態などを勘案して自ら薬液注入を制御できるモードである。
さらに、間歇モードは、初期薬液の注入開始から終了まで一定の注入時間と、一時停止時間がそれぞれ予め設定され、注入時間による注入量が予め設定されて注入と停止を繰り返して実行しながら薬液を注入するモードである。
さらに、完全非経口栄養法モードは、3単位の時間帯に分割して薬液を注入するモードとして、第1単位の時間には初期薬液注入開始から一定時間、注入される薬液が漸増し、第2単位の時間帯には一定時間、一定量の薬液が注入され、第3単位の時間帯には一定時間注入される薬液量が漸減するモードである。
またさらに、多段階モードは、多段階の時間単位に分割して各時間単位別に一定量の薬液注入を設定し、隣接した段階で注入される薬液量とは全く無関係であり、不規則的に薬液注入を設定することができる特徴のモードである。このような多段階モードは薬液注入によって神経刺激や脳組織、筋肉組織に対する刺激が必要とした患者に不規則な量の薬液を投入するように設定する。
図12は本発明の一実施形態に係る薬液定量自動注入装置の回路構成を示すブロック図である。
これを参照すれば、本発明の一実施形態に係る薬液定量自動注入装置2は、注入モードを選択するモード選択ボタン10aと、薬液の注入開始及び停止を選択する開始/停止選択ボタン10bと、注入量の加減設定のための加減選択ボタン10cを備えており、患者セルフコントロールモードにおける自操薬液追加注入を操作するためのボウラススイッチ14をさらに備える。
また、本発明の一実施形態に係る薬液定量自動注入装置2は、チューブ16を載置して受納するカバーの閉鎖状態を検知するドア検知センサー60と、チューブ16の内部にエアーが含まれているかどうかを検知するエアー検知センサー62と、チューブ16の閉塞状態を検知する詰まり検知センサー63を備えており、モーター74の回転数を検出するためのモーター回転数検知センサー72をさらに備える。
また、本発明の一実施形態に係る薬液定量自動注入装置2は、圧力ポンプ(図示せず)を駆動するモーター74及びこれを駆動するモーター駆動部76を備えており、そのモーター74の回転数を検知するためのエンコーダー部78をさらに備える。また、ブザー80及びこれを駆動するブザー駆動部82を備えることによって、薬液注入中にドアが開いたり、注入される薬液内にエアーが含まれていたり、モーター74の連結線が短絡したり、モーターが過負荷で駆動したり、チューブ16が閉塞状態になったり、バッテリーの電源が不足した場合、ブザー80を駆動して患者に薬液定量自動注入装置2の異常状態を警報する。
また、ボタン部10で操作したモード選択や薬液注入加減量、注入停止や注入開始状態を患者にディスプレーするLCD11と、これを駆動するLCD駆動部84を備える。
本発明の一実施形態に係る薬液定量自動注入装置2は、図11a〜図11eに示すような連続モード、患者セルフコントロールモード、間歇モード、完全非経口栄養法モード、多段階モードによる薬液注入アルゴリズム及びモーター回転数に基づいた投入量データが格納されているデータ格納部86を備える。
一方、本発明の一実施形態に係る薬液定量自動注入装置2は、ボタン部10に備わった各ボタンの入力による信号を受信してデータ格納部86に格納された当該モードのアルゴリズムを行い、注入モード時モーター74の回転数を検出してモーター74の駆動を制御し、各センサーからの検知信号を受信して以上有無を確認し、以上発生時モーター74を停止させてブザー80を駆動するなどの制御を行って安全で、且つ精密に薬液が注入されるように制御する制御部88を備える。その制御部88の内部にはタイマー88aがさらに含まれており、患者が既設定された注入時間によって各モードを実行しながら薬液が注入されるように時間が設定できる。
次には、添付図面を参照して前述した構成の本発明の一実施形態に係る薬液定量自動注入装置の使用及び注入制御方法について詳細に説明する。
図13は本発明の一実施形態に係る薬液定量自動注入装置の全体動作に対するアルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置に電源が印加されれば、全てのデータは初期化され、制御部は初期自家診断を実施する。初期自家診断はセンサーなどの状態、モーターの駆動状態、ブザー及びLCD駆動状態などをチェックする。
そして、制御部は装置のデータをロードし、コードチェックを行い、既設定モード(ホールド)を進行するか、新しい患者として設定するかを選択する。既設定モードを使用者が選択する場合は駆動準備を行い、新しい患者を選択した場合、使用者は注入モードを選択する。使用者モードの選択時は、各設定データ(モード選択及び全体注入量、注入時間など)を設定し、設定が完了すれば駆動を準備する。または、チェックコードを変更することもできる。
駆動準備状態で駆動モードに転換されれば、駆動中に使用者の判断によってコードをチェックした後、流量を再設定できる。この時、データ格納部に新しい設定値を格納し、再設定した流量で薬液の注入駆動が行われるようにする。
薬液の注入駆動中にエラーが発生すれば、制御部はまずモーターを停止させて薬液注入を停止する。問題の解決後、制御部は薬液の注入が再開始するように制御する。もし、使用者が停止キーを操作して停止信号を発生すれば、当該コードをチェックしてモーターを停止させて薬液の注入を停止し、電源をオフさせることができる。
図14は本発明の一実施形態に係る薬液定量自動注入装置を利用した設定準備モードのアルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置は電源のオン時に、パスコードをチェックして使用者以外の人が接近することを遮断し、パスコードの確認後には電源オフ以前の注入量と設定注入量を比較して既設定モードを進行するか、初期モードに進行するかを使用者が選択できるようにする。
また、既設定モードでは初期モードにおける電源オフ以前の注入情報を確認することができるようにする。
制御部はデータ設定準備モードを進行する間、ボウラススイッチが操作されているかを判断する。使用者がボウラススイッチを操作すれば、ドア検知センサー及び圧力センサーをチェックし、エラーがなければモーターを駆動させる。患者がボウラススイッチを操作しない場合は、ボウラススイッチ操作以前のモードを維持する。
使用者が既設定された注入モードを選択した場合、制御部はデータ格納部から既設定された注入モードの情報を読み取って、使用者が直ちに駆動準備モードを行うことができるようにする。
使用者が新しい患者を設定した場合、注入モード及びその他必要なデータを入力できるようにする。
図15は本発明の一実施形態に係る薬液定量自動注入装置を利用したデータ選択設定アルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置2において、患者が注入モードを選択する時は、図15に示すような注入プロピルを選択または入力しなければならない。その注入モードとしては図11a〜図11eに示すように、連続モード、患者セルフコントロールモード、間歇モード、完全非経口栄養法モード、多段階モードがある。
もし、連続モード(持続注入モード)を選択すれば、患者が注入量を入力して注入速度を選択できる。全体注入量、または時間別注入量を患者が選択して注入時間を選択すれば、注入量及び注入時間による注入速度は自動に決定される。したがって、患者は注入量と注入時間だけを選択すればよい。
ここで、患者が患者セルフコントロールモードを選択した場合は、全体注入量と注入速度、持続注入量、持続注入速度、ボウラススイッチ操作時の注入量、ボウラススイッチ操作時の注入速度及びロックアウトタイム(最初のボウラススイッチ操作と2度目の操作との時間間隔)を設定する。
また、患者が間歇モードを選択した場合は、全体注入量と注入速度、インターバル時間、注入駆動時間を選択する。
さらに、患者が完全非経口栄養法モードを選択した場合は、全体注入量と持続注入速度、注入漸増時間、注入漸減時間を選択する。
またさらに、患者が多段階モードを選択した場合、全体注入量と持続注入速度、注入時間を選択し、全段階を設定するかどうかも選択できる。
図16は本発明の一実施形態に係る薬液定量自動注入装置を利用した注入動作中の動作及びキー入力状態を示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置2において、駆動準備が完了した状態でのモード駆動時、制御部88はデータ格納部86からモード設定情報を読み取ってローディングし、注入開始コードと注入停止コードを一定時間単位でチェックする。すなわち、キー信号やセンサー検知信号から注入開始や注入停止コードが発生するかを一定時間単位でチェックする。
もし、開始コードが発生する場合は、基本速度を再設定するために患者がキー信号を発生させているかを判断し、再設定キー信号が発生すれば速度再設定を行って駆動を進行する。反面に、停止コードが発生する場合は、設定情報を読み取って注入を停止し、パワーオフキーが入力されているか、他のモード選択信号が発生するかを判断する。他のモード選択信号が発生すれば、モード設定情報を読み取って画面にディスプレーする。また、注入駆動時エラーや注入停止信号がセンサーから発生すれば、薬液の注入を停止した後、問題の解決後に再駆動する。
図17は本発明の一実施形態に係る薬液定量自動注入装置における自家テストアルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置において、自家テストを行うステップではモーター動作にモーターの現在電流を確認してモーターの停止または動作の可否を判断し、モーターのエラー発生の可否をチェックして、エラーがない正常の場合にモーターを動作させる。
モーターの動作中にはモーターの動作電流、エンコーダーを利用したエンコーダーの動作の可否、ホールセンサーを利用したカップリングの異常有無などのエラー発生の可否をチェックする。エラーが発生しなければ、次のモード(コードチェック)に進行する。
もし、自家テスト中にエラーが発生すれば、エラー情報を画面にディスプレーすると共に、アラームを通じて警報し、一定時間後に再テストステップを行う。
図18は本発明の一実施形態に係る薬液定量自動注入装置のモーター駆動時のアルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置ではモーターを駆動する前に、現在の注入速度による単位時間当りエンコードパルス数を計算し、直前駆動から発生した超過回転と減少回転を補正した現在時間における動作パルス数を計算する。
モーターの動作前に、自家テストのような方法でモーターのエラーをチェックし、モーターとエンコーダーに電源を印加してモーターとエンコーダーを動作させる。モーターの動作中にもドア検知センサー、エアー検知センサー、圧力検知センサーにおけるエラーの有無と、自家テストと同一な方法を利用したモーターの動作中のエラーを確認する。この時、エラーが発生すれば直ちにモーターの動作を停止させる。
モーターの動作中、既設定されたエンコーダーのパルス値とモーターの動作中発生したエンコーダーの値を確認してモーターを停止させる。この時、エンコーダーのパルス数を確認して回転数の超過や減少をチェックする。以後、エンコーダーの電源をオフして節電する。
このようなステップを30秒間隔で連続的に行って薬液を注入する薬液定量自動注入制御方法が提供される。
図19aは本発明の一実施形態に係る薬液定量自動注入装置を利用した連続注入モード時の動作アルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置を利用して連続注入モードを行うステップは、連続注入モードのモーター動作速度を計算し、図18と同一な方法でモーターを制御する。また、毎瞬間現在の注入量を計算し、計算した注入量と既設定された値と比較して薬液の注入完了をチェックする。現在注入した注入量に基づいて今後約10分後に薬液注入が終わるかどうかをシミュレーションして使用者に通知する。
もし、現在の薬液注入量が既設定された薬液注入量より多ければ、薬液注入速度をKVO注入速度に変換し、前述した方法と同一な方法で薬液を注入しながら電源がオフされるのを待機する。
図19bは本発明の一実施形態に係る薬液定量自動注入装置の患者セルフコントロール注入モード時のアルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置を利用して患者自操注入モードを行う場合、負荷容量注入モードの薬液注入速度で負荷容量を注入し、負荷容量注入が終了すれば、連続注入モードに進行して一定速度で薬液を注入する。この時、現在ロックアウトタイム(lock out time)なのかを確認し、ロックアウトタイムならばボウラススイッチの動作の可否を無視し、連続注入モードならばボウラススイッチの動作の可否を確認してボウラス注入を行う。
この時、負荷容量注入と連続注入モードは30秒を基本時間として薬液を注入するが、ボウラス注入モードは1秒を基本時間として薬液を注入する。
本機器の制御装置は各モードの変化によるモーターの動作速度を計算し、図18と同一な方法でモーターを制御する。また、毎瞬間現在の注入量を計算し、計算した注入量と既設定された値と比較して薬液の注入完了をチェックする。現在注入した注入量に基づいて今後約10分後に薬液注入が終わるかどうかをシミュレーションして使用者に通知する。
もし、現在の薬液注入量が既設定された薬液注入量より多ければ、薬液注入速度をKVO注入速度に変換し、前述した方法と同一な方法で薬液を注入しながら電源がオフされるのを待機する。
図19cは本発明の一実施形態に係る薬液定量自動注入装置の間歇注入モード時のアルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置を利用して間歇注入モードを行う場合、現在薬液注入動作モードなのか、薬液注入停止モードなのかを確認する。薬液注入モードならば、連続注入モードのモーター動作速度を計算し、停止モードならばKVO注入モードのモーター動作速度を計算し、図18と同一な方法でモーターを制御する。また、毎瞬間現在の注入量を計算し、計算した注入量と既設定された値と比較して薬液の注入完了をチェックする。現在注入した注入量に基づいて今後約10分後に薬液注入が終わるかどうかをシミュレーションして使用者に通知する。
もし、現在の薬液注入量が既設定された薬液注入量より多ければ、薬液注入速度をKVO注入速度に変換し、前述した方法と同一な方法で薬液を注入しながら電源オフを待機する。
図19dは本発明の一実施形態に係る薬液定量自動注入装置の完全非経口栄養法注入モード時のアルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置を利用して完全非経口栄養法注入モードを行うステップは、現在薬液注入動作モードが漸増モードなのか、漸減モードなのかを確認し、時間によるモーターの動作速度を毎周期ごとに計算してモーターの動作速度を計算する。この時、両モードでなければ、連続注入モードのモーター動作速度を計算し、図18と同一な方法でモーターを制御する。また、毎瞬間現在の注入量を計算し、計算した注入量と既設定された値と比較して薬液の注入完了をチェックする。現在注入した注入量に基づいて今後約10分後に薬液注入が終わるかどうかをシミュレーションして使用者に通知する。
もし、現在の薬液注入量が既設定された薬液注入量より多ければ、薬液注入速度をKVO注入速度に変換し、前述した方法と同一な方法で薬液を注入しながら電源がオフされるのを待機する。
図19eは本発明の一実施形態に係る薬液定量自動注入装置の多段階注入モード時のアルゴリズムを示すフローチャートである。
まず、本発明の一実施形態に係る薬液定量自動注入装置を利用して多段階注入モードを行うステップは、現在の薬液注入段階が何番目の段階なのかを確認して現在の段階によるモーターの動作速度を計算し、図18と同一な方法でモーターを制御する。また、毎瞬間現在の注入量を計算し、計算した注入量と既設定された値と比較して薬液の注入完了をチェックする。現在注入した注入量に基づいて今後約10分後に薬液注入が終わるかどうかをシミュレーションして使用者に通知する。
もし、現在の薬液注入量が既設定された薬液注入量より多ければ、薬液注入速度をKVO注入速度に変換し、前述した方法と同一な方法で薬液を注入しながら電源がオフされるのを待機する。
以上のように、本発明に係る薬液定量自動注入装置及びその注入制御方法は、患者自ら常時携帯しながら、時間と場所に拘束されず、予め設定した量の薬液を定量ずつ自動注入することができるので、非常に便利であり、特に患者が痛みを感じる時は、自らボタンを押して追加に薬液を注入できるので、便宜性が高い。また、カムとスプリング連結部材を利用して、振動が激しい場所でも正確にモーターの回転力を伝達して定量で薬液を投入できる。
そして、チューブの閉塞状態を検知する詰まり検知センサーと、チューブの正確な受納状態を検知するドア検知センサー、チューブ内部のエアーを検知するエアー検知センサーと、モーターの既設定回転数の維持状態を検出するモーター回転数検知センサーから発生した検知信号に基づいて薬液の注入を制御することによって、より正確で、且つ安全な薬液注入が可能である。また、モーターの回転数を注入速度と連動してチェックし、異常発生時、薬液の注入を停止して回転数を比較することによって、エラーを補正し、各種センサーを利用して薬液注入動作中の異常有無を随時チェックできる。
4 ハウジング
6 薬液貯蔵室
8 制御室
10 ボタン部
11 LCD
12 駆動室
14 ボウラススイッチ
16 チューブ
20 注射針
22 カバー
24 支持台
26 付勢突起
28 圧力ポンプ
30 付勢片
32 ガイド溝
34 逆止弁載置溝
6 薬液貯蔵室
8 制御室
10 ボタン部
11 LCD
12 駆動室
14 ボウラススイッチ
16 チューブ
20 注射針
22 カバー
24 支持台
26 付勢突起
28 圧力ポンプ
30 付勢片
32 ガイド溝
34 逆止弁載置溝
Claims (18)
- 内部に3個の隔室がそれぞれ分離されており、その外部を支持するためのハウジングと;
前記ハウジングの最上端に隔室で構成され、内部に薬液パックを格納する薬液貯蔵室と;
その薬液貯蔵室の下端に配設され、薬液の注入量や時間間隔を設定するボタン部と、その設定状態が画面表示されるLCDを備えており、内部には各種回路素子が装着された回路基板が内設される制御室と;
前記制御室の下端に配設され、薬液を圧送してチューブを通した薬液の排出を駆動するための圧力ポンプが内設されており、前記圧力ポンプの駆動制御を通じて薬液の投入状態を断続するための駆動室と;
電線を介して前記ハウジングの側面の所定部に連結されて追加の薬液投入命令信号を発生するボウラススイッチと;
前記駆動室の内部から外部に延びて前記薬液パックから排出される薬液を針に移送するチューブと;を含むことを特徴とする薬液定量自動注入装置。 - 前記駆動室内部のハウジングの上部にはチューブが載置されるガイド溝が形成され、圧力ポンプが備わって、そのガイド溝と圧力ポンプを上部から受納するためのカバーがヒンジにより開閉自在に結びついており、チューブの中間所定部には薬液注入を断続する逆止弁が載置される逆止弁載置溝が形成されることを特徴とする請求項1に記載の薬液定量自動注入装置。
- 前記カバーの下面には前記圧力ポンプに対してチューブを付勢するための一定長さの支持台が突設されており、前記逆止弁を付勢して薬液を注入させる付勢突起が突設されていることを特徴とする請求項2に記載の薬液定量自動注入装置。
- 前記圧力ポンプは、ハウジングの上面に形成された凹溝に挿設され、その上面がU状になった複数の中央部が穿孔され、その上面にはチューブが載置される付勢片と;その付勢片の中央部に形成されたカム孔に嵌入され、外周縁にはスクリューが形成されたカムと;前記カムに駆動力を提供するモーターと;前記カム軸とモーター軸を連結し、軸整列が所定角度の範囲内でずれていても動力伝達が可能なスプリングと;からなることを特徴とする請求項2に記載の薬液定量自動注入装置。
- 前記付勢片は、カムにより隣接した付勢片に連結されてカムの駆動時サイン波の形態で上昇及び下降しながらチューブを付勢することによって、薬液を移送することを特徴とする請求項4に記載の薬液定量自動注入装置。
- 前記逆止弁にはその両端にそれぞれ装置内部から薬液を移送するメーンチューブ及び装置外部に薬液を排出する排出チューブが連結され、内部には開閉部材が受容されるハウジングと;前記ハウジングの中央空間部に位置して上下移動しながらハウジングの両端の流路を開閉するように外周縁がテーパーになった開閉部材と;からなることを特徴とする請求項2に記載の薬液定量自動注入装置。
- 内部に3個の隔室がそれぞれ分離されており、その外部を支持するためのハウジングと;前記ハウジングの上端に隔室で構成され、内部に薬液パックを格納する薬液貯蔵室と;薬液を圧送してチューブを通した薬液の排出を駆動するための圧力ポンプが内設され、薬液の投入状態を断続するための駆動室と;電線を介して前記ハウジングの側面の所定部に連結されて追加の薬液投入命令信号を発生するボウラススイッチと;前記駆動室の内部から外部に延びて前記薬液パックから排出される薬液を針に移送させるチューブと;前記チューブの中間部にその逆止弁ハウジングの両端がそれぞれ連結されており、内部空間に開閉部材が受容され、その開閉部材が上下移動することによって、薬液注入を断続する逆止弁と;からなる薬液定量自動注入装置において、
前記逆止弁の下部支持面に付着されて逆止弁ハウジングの内圧の変化により膨縮するメンブレインと;
前記メンブレインの裏面に付着されてメンブレインの膨脹時ハイ信号を発生することによって、チューブの詰まりを検知する詰まり検知センサーと;
前記ハウジングの下面に設けられ、チューブ受納用カバー部の閉鎖状態を検知してハイ信号を発生するドア検知センサーと;
前記チューブの装着面の下部に配設されて薬液注入時ハイ信号を発生し、エアーの含有時ロー信号を発生してエアーを検知するエアー検知センサーと;
前記詰まり検知センサーと、ドア検知センサー、エアー検知センサーから印加される検知信号の中で異常状態の信号が発生する時、圧縮ポンプの駆動を停止させる制御部と;を含むことを特徴とするマルチセンサーが内設された薬液定量自動注入装置。 - 前記詰まり検知センサー、ドア検知センサー、及びエアー検知センサーは、液体、金属、皮膚の近接時ハイ信号を発生する近接センサーであることを特徴とする請求項7に記載のマルチセンサーが内設された薬液定量自動注入装置。
- 前記駆動室は、その内部に前記圧縮ポンプを駆動するモーターの回転数を検知するためのモーター回転数検知センサーをさらに含むことを特徴とする請求項7に記載のマルチセンサーが内設された薬液定量自動注入装置。
- 前記突出回転部には磁石が装着されており、前記モーター回転数検知センサーはホールセンサーとしてモーター軸の回転状態を検知することを特徴とする請求項9に記載のマルチセンサーが内設された薬液定量自動注入装置。
- 患者に薬液を定量ずつ自動注入するために注入モードを選択するモード選択ボタンと、薬液の注入開始及び停止を選択する開始/停止選択ボタンと、注入量の加減設定のための加減選択ボタンを備えるボタン部と;患者セルフコントロール(PCA)モードにおける自操薬液追加注入を操作するためのボウラススイッチと;載置されたチューブを受納するカバーの閉鎖状態を検知するためのドア検知センサーと;チューブの内部にエアーの含有可否を検知するためのエアー検知センサーと;チューブの閉塞状態を検知するための詰まり検知センサーと;圧力ポンプを駆動するモーター及びモーター駆動部と;前記ボタン部で操作したモード選択や薬液注入の加減量、注入停止や注入開始状態を患者が認知できるようにディスプレーするLCD及びこれを駆動するためのLCD駆動部と;からなる薬液定量注入装置において、
前記モーターの回転数を検知するためのエンコーダーと;
注入状態の以上を警告するためのブザー及びこれを駆動するためのブザー駆動部と;
薬液連続注入モード、患者セルフコントロール(PCA)モード、間歇(Intermittent)モード、完全非経口栄養法(TPN)モード、多段階(Multi−step)モードによる薬液注入アルゴリズムが格納されているデータ格納部と;
前記ボタン部に備わった各ボタンの入力による信号を受信して前記データ格納部に既格納された当該モードアルゴリズムを実行し、注入モード時にはモーターの回転数を検出してモーターの駆動制御を行い、各センサーから検知信号を受信して以上有無を確認し、以上の発生時前記モーターが停止すると同時にブザーが駆動されるように制御を行う制御部と;を含むことを特徴とする薬液定量自動注入装置。 - 薬液を定量ずつ自動注入するための薬液定量自動注入制御方法において、
電源を印加するステップと;
初期に自家テストするステップと;
初期モードを実行するステップと;
既設定モードの選択可否を判断するステップと;
注入モードを選択するステップと;
注入モード準備を行うステップと;
薬液注入を駆動するステップと;
終了約10分前を知らせるステップと;
終了コードが発生するステップと;
動作中で流速を再設定するステップと;
モーターの駆動に連貫してエラーをチェックするステップと;
薬液注入を停止するステップと;を含むことを特徴とする薬液定量自動注入制御方法。 - 前記薬液注入モードは、初期の薬液注入開始から終了までの駆動時間の間、既設定された定量の薬液を持続的に注入する連続注入モードと;連続モードにおける定量の薬液にさらに一定量の薬液を注入させる患者セルフコントロール(PCA)モードと;初期の薬液注入開始から終了まで一定の注入時間と一時停止時間がそれぞれ予め設定され、注入時間時注入量が予め設定されて注入と停止を繰り返して実行しながら薬液を注入する間歇モードと;初期薬液注入開始から一定時間は注入される薬液が漸増するようにし、一定時間は一定量の薬液が注入されるようにし、一定時間は注入される薬液量が漸減するようにする完全非経口栄養法モードと;多段階の時間単位に分割して各時間単位別に一定量の薬液注入を設定する多段階モードと;からなることを特徴とする請求項12に記載の薬液定量自動注入制御方法。
- 前記初期モード実行ステップは、ボウラススイッチが操作されるかを判断し、ボウラススイッチが操作されると、圧力検知センサー及びドア検知センサーをチェックしてモーターを駆動させ、ボウラススイッチが操作されないと、ボウラス操作以前のモードを維持するステップであることを特徴とする請求項12に記載の薬液定量自動注入制御方法。
- 前記注入モードを選択するステップでは全体の注入量と注入速度を共通的に選択し、患者自操追加注入モードではボウラススイッチ操作時の注入量と注入速度、ロックアウトタイムをさらに選択し、間歇モードでは薬液注入時間、注入停止時間をさらに選択し、完全非経口栄養法モードでは漸増時間、漸減時間をさらに選択し、多段階モードでは注入段階をさらに選択することを特徴とする請求項12に記載の薬液定量自動注入制御方法。
- 前記注入モード準備を行うステップは、エアー検知センサー、圧力検知センサー及びドア検知センサーをチェックしてエラーの発生可否をチェックし、試験警報を発生するステップであることを特徴とする請求項12に記載の薬液定量自動注入制御方法。
- モーターが停止して一定時間経過後に、モーターの駆動とは無関係でエンコーダーとホールセンサーの入力電源をオフしてバッテリーの長時間使用を可能にするステップをさらに含むことを特徴とする請求項12に記載の薬液定量自動注入制御方法。
- 前記薬液注入を駆動するステップは、オン、オフ制御やPWM制御またはPID制御を通じてモーターを駆動させ、モーター駆動による回転時エンコーダーとホールセンサーを利用してパルス数を検出して既設定回転数と比較し、回転数の超過や減少時既設定回転数に補正するステップであることを特徴とする請求項12に記載の薬液定量自動注入制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004214192A JP2006034323A (ja) | 2004-07-22 | 2004-07-22 | 薬液定量自動注入装置及びその注入制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004214192A JP2006034323A (ja) | 2004-07-22 | 2004-07-22 | 薬液定量自動注入装置及びその注入制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006034323A true JP2006034323A (ja) | 2006-02-09 |
Family
ID=35899966
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004214192A Pending JP2006034323A (ja) | 2004-07-22 | 2004-07-22 | 薬液定量自動注入装置及びその注入制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006034323A (ja) |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010503515A (ja) * | 2006-09-18 | 2010-02-04 | バクスター・インターナショナル・インコーポレイテッド | 治療用物質の制御された注入のための方法およびシステム |
| JP2013512732A (ja) * | 2009-12-04 | 2013-04-18 | スミス メディカル エーエスディー, インコーポレイテッド | 携帯式輸液ポンプおよびシステム用の高度ステップ治療送達 |
| KR101467452B1 (ko) * | 2012-05-18 | 2014-12-03 | (주)디앤케이 | 피부 시술 시스템 및 그 제어방법 |
| KR101648056B1 (ko) * | 2015-06-01 | 2016-08-18 | 고대철 | 자동약액주입장치 |
| US9474856B2 (en) | 2007-05-24 | 2016-10-25 | Tandem Diabetes Care, Inc. | Expert system for infusion pump therapy |
| US9669160B2 (en) | 2014-07-30 | 2017-06-06 | Tandem Diabetes Care, Inc. | Temporary suspension for closed-loop medicament therapy |
| US9833177B2 (en) | 2007-05-30 | 2017-12-05 | Tandem Diabetes Care, Inc. | Insulin pump based expert system |
| CN107500370A (zh) * | 2017-08-07 | 2017-12-22 | 中国水利水电科学研究院 | 一种社区污水处理系统 |
| US10016561B2 (en) | 2013-03-15 | 2018-07-10 | Tandem Diabetes Care, Inc. | Clinical variable determination |
| US10052049B2 (en) | 2008-01-07 | 2018-08-21 | Tandem Diabetes Care, Inc. | Infusion pump with blood glucose alert delay |
| US10357606B2 (en) | 2013-03-13 | 2019-07-23 | Tandem Diabetes Care, Inc. | System and method for integration of insulin pumps and continuous glucose monitoring |
| US10569016B2 (en) | 2015-12-29 | 2020-02-25 | Tandem Diabetes Care, Inc. | System and method for switching between closed loop and open loop control of an ambulatory infusion pump |
| WO2022035057A1 (ko) * | 2020-08-13 | 2022-02-17 | 이오플로우(주) | 약물 주입량 계산기의 비활성화 시간을 결정하는 방법, 장치 및 컴퓨터 프로그램 제품 |
| US11291763B2 (en) | 2007-03-13 | 2022-04-05 | Tandem Diabetes Care, Inc. | Basal rate testing using frequent blood glucose input |
| WO2022075662A1 (ko) * | 2020-10-06 | 2022-04-14 | 이오플로우(주) | 약액 주입 장치 |
| JP2022124453A (ja) * | 2021-02-15 | 2022-08-25 | 桜井 英三 | ステップ検知ユニット |
| CN115413588A (zh) * | 2022-09-26 | 2022-12-02 | 郑州大学 | 一种研究snx17与lrp4表达互做的实验模型制备系统 |
| US11676694B2 (en) | 2012-06-07 | 2023-06-13 | Tandem Diabetes Care, Inc. | Device and method for training users of ambulatory medical devices |
| WO2024106867A1 (ko) * | 2022-11-16 | 2024-05-23 | 주식회사 갈렙 | 수액펌핑모듈과 수액펌핑장치 그리고 내시경펌핑시스템 |
| CN118634388A (zh) * | 2024-08-12 | 2024-09-13 | 四川大学华西医院 | 一种麻醉药物剂量管理方法 |
| CN118706220A (zh) * | 2024-05-21 | 2024-09-27 | 宝腾智能润滑技术(东莞)有限公司 | 用于分配器分配量检测的检测方法 |
| KR102770949B1 (ko) | 2022-11-03 | 2025-02-21 | 이오플로우(주) | 약물 주입량 계산기의 비활성화 시간을 결정하는 방법, 장치 및 컴퓨터 프로그램 제품 |
-
2004
- 2004-07-22 JP JP2004214192A patent/JP2006034323A/ja active Pending
Cited By (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010503515A (ja) * | 2006-09-18 | 2010-02-04 | バクスター・インターナショナル・インコーポレイテッド | 治療用物質の制御された注入のための方法およびシステム |
| US11291763B2 (en) | 2007-03-13 | 2022-04-05 | Tandem Diabetes Care, Inc. | Basal rate testing using frequent blood glucose input |
| US10357607B2 (en) | 2007-05-24 | 2019-07-23 | Tandem Diabetes Care, Inc. | Correction factor testing using frequent blood glucose input |
| US11257580B2 (en) | 2007-05-24 | 2022-02-22 | Tandem Diabetes Care, Inc. | Expert system for insulin pump therapy |
| US10943687B2 (en) | 2007-05-24 | 2021-03-09 | Tandem Diabetes Care, Inc. | Expert system for insulin pump therapy |
| US9474856B2 (en) | 2007-05-24 | 2016-10-25 | Tandem Diabetes Care, Inc. | Expert system for infusion pump therapy |
| US11848089B2 (en) | 2007-05-24 | 2023-12-19 | Tandem Diabetes Care, Inc. | Expert system for insulin pump therapy |
| US9833177B2 (en) | 2007-05-30 | 2017-12-05 | Tandem Diabetes Care, Inc. | Insulin pump based expert system |
| US11576594B2 (en) | 2007-05-30 | 2023-02-14 | Tandem Diabetes Care, Inc. | Insulin pump based expert system |
| US11298053B2 (en) | 2007-05-30 | 2022-04-12 | Tandem Diabetes Care, Inc. | Insulin pump based expert system |
| US11986292B2 (en) | 2007-05-30 | 2024-05-21 | Tandem Diabetes Care, Inc. | Insulin pump based expert system |
| US10052049B2 (en) | 2008-01-07 | 2018-08-21 | Tandem Diabetes Care, Inc. | Infusion pump with blood glucose alert delay |
| US11302433B2 (en) | 2008-01-07 | 2022-04-12 | Tandem Diabetes Care, Inc. | Diabetes therapy coaching |
| US8882701B2 (en) | 2009-12-04 | 2014-11-11 | Smiths Medical Asd, Inc. | Advanced step therapy delivery for an ambulatory infusion pump and system |
| US10016559B2 (en) | 2009-12-04 | 2018-07-10 | Smiths Medical Asd, Inc. | Advanced step therapy delivery for an ambulatory infusion pump and system |
| US11090432B2 (en) | 2009-12-04 | 2021-08-17 | Smiths Medical Asd, Inc. | Advanced step therapy delivery for an ambulatory infusion pump and system |
| JP2013512732A (ja) * | 2009-12-04 | 2013-04-18 | スミス メディカル エーエスディー, インコーポレイテッド | 携帯式輸液ポンプおよびシステム用の高度ステップ治療送達 |
| KR101467452B1 (ko) * | 2012-05-18 | 2014-12-03 | (주)디앤케이 | 피부 시술 시스템 및 그 제어방법 |
| US11676694B2 (en) | 2012-06-07 | 2023-06-13 | Tandem Diabetes Care, Inc. | Device and method for training users of ambulatory medical devices |
| US10357606B2 (en) | 2013-03-13 | 2019-07-23 | Tandem Diabetes Care, Inc. | System and method for integration of insulin pumps and continuous glucose monitoring |
| US11607492B2 (en) | 2013-03-13 | 2023-03-21 | Tandem Diabetes Care, Inc. | System and method for integration and display of data of insulin pumps and continuous glucose monitoring |
| US10016561B2 (en) | 2013-03-15 | 2018-07-10 | Tandem Diabetes Care, Inc. | Clinical variable determination |
| US9669160B2 (en) | 2014-07-30 | 2017-06-06 | Tandem Diabetes Care, Inc. | Temporary suspension for closed-loop medicament therapy |
| KR101648056B1 (ko) * | 2015-06-01 | 2016-08-18 | 고대철 | 자동약액주입장치 |
| US10569016B2 (en) | 2015-12-29 | 2020-02-25 | Tandem Diabetes Care, Inc. | System and method for switching between closed loop and open loop control of an ambulatory infusion pump |
| US11638781B2 (en) | 2015-12-29 | 2023-05-02 | Tandem Diabetes Care, Inc. | System and method for switching between closed loop and open loop control of an ambulatory infusion pump |
| CN107500370B (zh) * | 2017-08-07 | 2024-02-06 | 中国水利水电科学研究院 | 一种社区污水处理系统 |
| CN107500370A (zh) * | 2017-08-07 | 2017-12-22 | 中国水利水电科学研究院 | 一种社区污水处理系统 |
| KR20220021179A (ko) * | 2020-08-13 | 2022-02-22 | 이오플로우(주) | 약물 주입량 계산기의 비활성화 시간을 결정하는 방법, 장치 및 컴퓨터 프로그램 제품 |
| KR102464832B1 (ko) | 2020-08-13 | 2022-11-09 | 이오플로우(주) | 약물 주입량 계산기의 비활성화 시간을 결정하는 방법, 장치 및 컴퓨터 프로그램 제품 |
| WO2022035057A1 (ko) * | 2020-08-13 | 2022-02-17 | 이오플로우(주) | 약물 주입량 계산기의 비활성화 시간을 결정하는 방법, 장치 및 컴퓨터 프로그램 제품 |
| WO2022075662A1 (ko) * | 2020-10-06 | 2022-04-14 | 이오플로우(주) | 약액 주입 장치 |
| US11998720B2 (en) | 2020-10-06 | 2024-06-04 | Eoflow Co., Ltd. | Liquid medicine injection device |
| JP7336495B2 (ja) | 2021-02-15 | 2023-08-31 | 桜井 英三 | ステップ検知ユニット |
| JP2022124453A (ja) * | 2021-02-15 | 2022-08-25 | 桜井 英三 | ステップ検知ユニット |
| US12233239B2 (en) | 2021-07-27 | 2025-02-25 | Icu Medical, Inc. | Advanced step therapy delivery for an ambulatory infusion pump and system |
| CN115413588A (zh) * | 2022-09-26 | 2022-12-02 | 郑州大学 | 一种研究snx17与lrp4表达互做的实验模型制备系统 |
| CN115413588B (zh) * | 2022-09-26 | 2023-07-18 | 郑州大学 | 一种研究snx17与lrp4表达互做的实验模型制备系统 |
| KR102770949B1 (ko) | 2022-11-03 | 2025-02-21 | 이오플로우(주) | 약물 주입량 계산기의 비활성화 시간을 결정하는 방법, 장치 및 컴퓨터 프로그램 제품 |
| WO2024106867A1 (ko) * | 2022-11-16 | 2024-05-23 | 주식회사 갈렙 | 수액펌핑모듈과 수액펌핑장치 그리고 내시경펌핑시스템 |
| CN118706220A (zh) * | 2024-05-21 | 2024-09-27 | 宝腾智能润滑技术(东莞)有限公司 | 用于分配器分配量检测的检测方法 |
| CN118634388A (zh) * | 2024-08-12 | 2024-09-13 | 四川大学华西医院 | 一种麻醉药物剂量管理方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006034323A (ja) | 薬液定量自動注入装置及びその注入制御方法 | |
| JP7235835B2 (ja) | 注入ポンプの方法およびシステム | |
| US20210290844A1 (en) | Methods and systems for controlling an infusion pump | |
| US5904668A (en) | Cassette for an infusion pump | |
| US5683367A (en) | Infusion pump with different operating modes | |
| US6468242B1 (en) | Medical apparatus with patient data recording | |
| US5795327A (en) | Infusion pump with historical data recording | |
| CA2060151C (en) | Automated infusion pump with replacement memory cartridges | |
| EP3216471B1 (en) | Medical injection device with electric motor drive control | |
| EP0275214A2 (en) | Programmable multiple pump medication infusion system with printer | |
| EP1535637A1 (en) | Automatic dose infusion apparatus | |
| JPH04221574A (ja) | 治療薬液を注射するための携帯式ポンプ | |
| RU2673983C1 (ru) | Шприцевой дозатор лекарственных средств | |
| KR101738252B1 (ko) | 정맥주사액공급장치 | |
| KR100607128B1 (ko) | 약물 정량 자동주입 제어장치 및 그 제어방법 | |
| KR100516727B1 (ko) | 멀티 센서가 내설된 휴대용 약물 주입펌프 | |
| US20060030836A1 (en) | Automatic dose infusion apparatus and method of controlling the same | |
| US7318819B2 (en) | Automatic locking valve for medication injection | |
| JPH06169992A (ja) | ぜん動式輸液ポンプ | |
| KR100363426B1 (ko) | 정맥 주사 정량 주입장치 | |
| JP2006026270A (ja) | 薬液注入装置 | |
| KR100561243B1 (ko) | 휴대용 약물 주입펌프 | |
| EP1618916B1 (en) | Automatic locking valve for medication injection | |
| JPH0759852A (ja) | 輸液ポンプ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070327 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070828 |