JP2005534026A - 光学式マーカーを用いた三次元測定データ自動整列装置及びその方法 - Google Patents
光学式マーカーを用いた三次元測定データ自動整列装置及びその方法 Download PDFInfo
- Publication number
- JP2005534026A JP2005534026A JP2004524349A JP2004524349A JP2005534026A JP 2005534026 A JP2005534026 A JP 2005534026A JP 2004524349 A JP2004524349 A JP 2004524349A JP 2004524349 A JP2004524349 A JP 2004524349A JP 2005534026 A JP2005534026 A JP 2005534026A
- Authority
- JP
- Japan
- Prior art keywords
- marker
- dimensional
- measurement data
- optical
- measurement object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005259 measurement Methods 0.000 title claims abstract description 698
- 230000003287 optical effect Effects 0.000 title claims abstract description 199
- 238000000034 method Methods 0.000 title claims abstract description 106
- 239000003550 marker Substances 0.000 claims abstract description 598
- 230000004397 blinking Effects 0.000 claims description 66
- 239000011159 matrix material Substances 0.000 claims description 46
- 230000007246 mechanism Effects 0.000 claims description 41
- 238000006243 chemical reaction Methods 0.000 claims description 24
- 230000009466 transformation Effects 0.000 claims description 23
- 238000012545 processing Methods 0.000 claims description 17
- 239000013598 vector Substances 0.000 claims description 11
- 239000000284 extract Substances 0.000 claims description 7
- 239000003086 colorant Substances 0.000 claims description 4
- 230000008569 process Effects 0.000 description 39
- 238000010586 diagram Methods 0.000 description 15
- 238000004364 calculation method Methods 0.000 description 5
- 230000001788 irregular Effects 0.000 description 5
- 238000011835 investigation Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000012937 correction Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000000844 transformation Methods 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
Images





























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
このための本発明は、所定の測定対象物から様々な角度で撮影して獲得された三次元測定データを整列する三次元データ測定装置において、複数の光学的なマーカーを前記測定対象物の表面に投影する光学式マーカー発生手段と;前記測定対象物に対する三次元測定のために測定対象物の表面に模様パターンを投影する三次元投影手段;前記測定対象物から光学式マーカー発生手段によって投影されたマーカーを含める二次元映像を獲得すると共に、前記三次元投影手段によって投影される測定対象物の三次元測定データを獲得する映像獲得手段及び;前記映像獲得手段によって獲得された二次元映像と三次元測定データとの関係からマーカーの三次元の位置を抽出し、各三次元測定データによるマーカーの位置から三次元測定データの相対的な位置を探す演算を行う制御手段で構成されたことを特徴とする光学式マーカーを用いた三次元測定データ自動整列装置を提供する。
Description
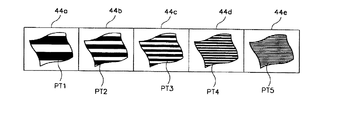
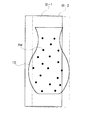
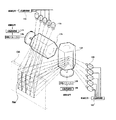
すなわち、図1は、従来のステッカー式のマーカーを測定対象物に付着して三次元的に測定するための状態を例示的に示した図面で、同図面では所定の三次元形象をもつ測定対象物(2)の全体的な表面にそって、複数のマーカー(4)を不規則的に付着させると同時に、それぞれのマーカー(4)が付着された測定対象物(2)の表面を各領域別に重なるよう繰り返して撮影することになる。
同図面で、前記映像入力部(24)は、前記映像獲得部(18)から獲得された映像データを入力してもらうためのものであり、マーカー点滅制御部(26)は前記マイクロプロセッサー(30)の制御によって前記マーカー発生器(12)の光学式マーカーを点滅させるようになる。

また、測定データの集合(P)をP=[pi]と定義し、基準となるデータ集合(X)をX=[xi]と定義した場合、PとXの中心体積(Center of Mass)は、下記の数式8によって定義される。
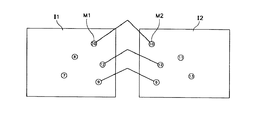
前記マーカー発生器(12)からの光学式マーカーが測定対象物(10)に投影されている状態で、映像獲得部(18)で前記測定対象物(10)の特定領域を撮影し、光学式マーカーが含まれた二次元映像を獲得すると、前記マイクロプロセッター(30)は映像入力部(24)を通じて前記映像獲得部(18)で獲得された二次元映像データが入力されることになる(段階S12)。
上記の表1で示した通り、1番目のマーカーは常に消燈状態が維持される反面、16番目のマーカーは常に点灯状態が維持されるようにし、全てのマーカーがそれぞれ固有の点灯値を持つようになる。
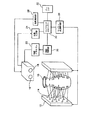
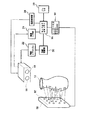
本発明の第6実施例による三次元測定データ自動整列装置の構成は、図16に図示した通りで、同図面に図示したように、測定対象物(10)、マーカー発生器(12)、投影部(16)、映像獲得部(18)、映像入力部(24)、マーカー点滅制御部(26)、投影制御部(28)、バッファ(32)、回転テーブル(100)、回転駆動部(102)、回転メカニズム(104)、マイクロプロセッサー(106)を含んで構成される。
そして、 マイクロプロセッサー(118)は上記の算出された各マーカーの三次元の位置をバッファ(32)のレジスターに登録する(段階S76)。
b : カメラ中心間の距離(base line distance)
f : カメラ焦点の長さ(camera's focal length)
A, B : 各カメラで獲得するイメージ面(image plane)
X1, Xr : 各イメージ面の原点から求めようとする座標Xの像に対するイメージ像の座標
P, Q : 各カメラのレンズ中心(lens center)』
上記の図27で、ステレオ(stereo)映像から求めようとする位置の座標(X)を得る方法は、以下の数学式15及び16に示した通りである。
そして、前記L個の映像獲得部(148)は、図28に図示した通り、測定対象物(10)を中心に一定の間隔で測定対象物(10)を指向する一方、各映像獲得部(148)の撮影領域が測定対象物(10)が測定しようとする全体領域を包括することができるように配置される。
前記マイクロプロセッサー(156)は、M個の投影部(146)及びL個の映像獲得部(148)により、それぞれ獲得された二次元映像と三次元測定データから各領域別のマーカーの三次元の位置を抽出し、この抽出されたマーカーの三次元の位置からそれぞれ重なる領域別に組となるマーカーを検索する。対となるマーカーによって位置変換行列を求めると同時に、求められた位置変換行列によって各三次元測定データの位置を変換して整列する演算処理を行う。
マイクロプロセッサー(156)は、上記求められた位置変換行列をバッファ(158)のレジスターに登録するようになり、これで段階S121のキャリブレーション作業が完了される。
上記のように、段階S121のキャリブレーション作業が完了されると、基準物体を除去し、基準物体があった場所に測定対象物(10)を配置することとなり、マイクロプロセッサー(156)はマーカー点滅制御部(154)を制御し、N個のマーカー発生器(142)が消灯され、光学式マーカーが測定対象物(10)に投影されないようにする(段階S122)。
次に、マイクロプロセッサー(156)は、前記段階(S121)のキャリブレーションによって求められた位置変換行列をバッファ(158)のレジスターから読み込み、L個の三次元測定データのうち、ある一つの位置を基準座標系にし、前記バッファ(158)のレジスターから読み込んだ位置変換行列により、現在の測定データを移動させて整列するようになる(段階S125)。
14:マーカー出力部、 16:投影部、
18:映像獲得部、 20:移動駆動部、
22:移動メカニズム、 24:映像入力部、
26:マーカー点滅制御部、 28:投影制御部
30:マイクロプロセッサー、 32:バッファ(Buffer)
Claims (39)
- 所定の測定対象物から様々な角度で撮影して獲得された三次元測定データを整列する三次元データ測定装置において、
複数の光学的なマーカーを前記測定対象物の表面に投影する光学式マーカー発生手段と;
前記測定対象物に対する三次元の測定のため、測定対象物の表面に模様パターンを投影する三次元投影手段;
前記測定対象物から光学式マーカー発生手段によって投影されたマーカーを含む二次元映像を獲得すると共に、前記三次元投影手段によって投影される測定対象物の三次元測定データを獲得する映像獲得手段;及び、
前記の映像獲得手段によって獲得された前記二次元映像と前記三次元測定データとの関係からマーカーの三次元の位置を抽出し、前記マーカーの三次元の位置から前記三次元測定データの相対的な位置を探す演算を行う制御手段;
から構成されていることを特徴とする光学式マーカーを用いた三次元測定データ自動整列装置。 - 前記三次元投影手段と映像獲得手段とは、相互固定的に一体化されるように構成されたことを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記制御手段の制御によって駆動される移動駆動部と、前記移動駆動部の駆動による動力を受けて前記三次元投影手段及び映像獲得手段を前記測定対象物に対し、相対的に移動させるための動作を行う移動メカニズムとをさらに含んで構成されたことを特徴とする請求項2に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記制御手段の制御により、前記マーカー発生手段によって発生するマーカーを周期的に点滅制御するマーカー点滅制御手段をさらに含んで構成され、
前記制御手段は、前記マーカー点滅制御手段によって光学式マーカーを点灯されるようにして、前記映像獲得手段で測定対象物の特定領域からマーカーが含まれた二次元映像を一次的に獲得するようにすると共に、光学式マーカーが消灯されるようにして、測定対象物の同一領域からマーカーが含まれていない二次元映像を二次的に獲得するように制御することを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。 - 前記マーカーの三次元の位置は、前記測定対象物の同一領域に対して獲得された光学式マーカーが含まれた二次元映像と、マーカーが含まれていない二次元映像との違いを前記制御手段が比較することで探し出すことを特徴とする請求項4に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記制御手段の制御により、前記マーカー発生手段の複数の光学式マーカーを、既に決められた順番によってそれぞれ個別的でかつ順次的に点灯されるように制御するマーカー個別点滅制御手段をさらに含んで構成され、
前記制御手段は、マーカー消灯状態で撮影された映像データとして基本映像データに設定し、前記映像獲得手段から光学式マーカー個数に対応する数で撮影された映像データを基本映像と比べ、マーカー二次元の位置を抽出するようになることを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。 - 前記制御手段の制御により、前記マーカー発生手段における複数の光学式マーカーに対する個別的な点滅を制御するマーカー個別点滅制御手段をさらに含んで構成され、
前記制御手段は、前記映像獲得手段を通じて映像データを撮影した後、その次の領域を撮影するため、前記マーカー発生手段を点灯制御する時、以前に撮影した領域を指示する光学式マーカーとその次の領域を指示する光学式マーカーとを区分して点滅するように、前記マーカー個別点滅制御手段を制御することを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。 - 前記マーカー発生手段は、色を選択的に転換して発光できる複数の多重色相発光素子により光学式マーカーを発生させるように構成され、前記多重色相発光素子の個別的な発光色相及び点滅を制御するマーカー個別点滅及び色相の制御手段をさらに含み、
前記制御手段は、前記映像獲得手段を通じて映像データを撮影した後、他の領域を撮影するため、前記マーカー発生手段を点灯制御する時、既に撮影した領域を指示する光学式マーカーと、まだ撮影していない領域を指示する光学式マーカーとの色相をそれぞれ異なるように発生させるように、前記マーカー個別点滅及び色相の制御手段を制御することを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。 - 前記制御手段の制御により、マーカー発生手段における複数の光学式マーカーの二進化のため、既に決められた順序によって重複分割してグループ別に設定し、各グループに含まれた複数のマーカーを順次的に点灯制御するマーカー個別点滅制御手段をさらに含んで構成され、
前記制御手段は、前記映像獲得手段からマーカーのグループ数に対応する個数で獲得された複数の映像データに含まれたグループ別のマーカーによる二進化情報を検索し、各マーカーにおける固有のIDとして二次元の位置を抽出するようになっていることを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。 - 前記制御手段の制御下で、三次元投影手段における模様パターンの投影状態を制御する投影制御部をさらに含んで構成され、前記制御手段は、投影制御部によって三次元投影手段で模様パターンを投影する時、前記マーカー発生手段の光学式マーカーが発生されないように制御することを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記マーカー発生手段は、測定しようとする測定対象物と相対的な運動をしないように互いに固定された状態で配置されることを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記マーカー発生手段は、測定対象物が置かれる回転テーブルに複数個が固定、配置されることを特徴とする請求項11に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記マーカー発生手段は、複数のレーザーマーカーが測定対象物の表面に対して不規則的に投影されるようになることを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記映像獲得手段は、前記測定対象物における共通の測定領域に対し、二次元映像及び三次元測定データを獲得し、前記制御手段は、二次元映像と三次元測定データ内に含まれている少なくとも二つ以上の特徴点により、マーカーの三次元の位置を判別するようになることを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記映像獲得手段は、測定対象物の表面が領域別にそれぞれ重なるように複数の二次元映像及び三次元測定データを獲得し、前記制御手段は、マーカーにおける三次元の位置から相互重なる領域別に対となるマーカーを検索し、対となるマーカーによって移動のための行列を求め、各測定データを基準座標系に移動させるようになることを特徴とする請求項14に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記映像獲得手段と前記三次元投影手段及び前記マーカー発生手段とがそれぞれ測定対象物を中心に複数個が配列され、前記制御手段は、前記複数の映像獲得手段によってそれぞれ獲得された二次元映像と三次元測定データとから各領域別マーカーの三次元の位置を抽出し、抽出されたマーカーの三次元の位置から相互重なる領域別に対となるマーカーを検索し、対となるマーカーによって位置変換行列を求め、その求められた位置変換行列によって各三次元測定データの位置を変換して整列するように構成されていることを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記制御手段は、前記の求められた位置変換行列を記憶し、次回の測定時は前記記憶された位置変換行列によって各三次元測定データの位置を変換して整列することを特徴とする請求項16に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記映像獲得手段は前記測定対象物の表面のうち、測定対象の全体領域に対し、区間距離を既に知っている複数の地点から複数の二次元映像を獲得すると共に、前記測定対象物の表面のうち、測定対象の全体領域を細分化した複数の測定領域に対し、領域別の境界部位が互いに重畳されるよう、複数の二次元映像及び三次元測定データを獲得するように構成され、
前記制御手段は、前記映像獲得手段を通じて獲得される測定対象の全体領域に対する複数の二次元映像情報と、既に知っている測定地点間の距離情報とを演算し、各マーカーの三次元の位置を算出すると共に、この算出された各マーカーの三次元の位置を絶対座標系に設定した後、それぞれ細分化された測定領域の二次元映像と三次元測定データから各領域別マーカーの三次元の位置を抽出し、この抽出されたマーカーの三次元の位置から互いに重なる領域別に対となるマーカーを検索し、対となるマーカーによって位置変換行列を求め、求められた位置変換行列によって各三次元測定データの位置を移動して、前記絶対座標系に整列するように構成されていることを特徴とする請求項1に記載の光学式マーカーを用いた三次元測定データ自動整列装置。 - 前記映像獲得手段は、細分化された測定領域の映像を獲得する測定装置とは別途に、測定対象の全体領域における映像を獲得する複数の大領域測定装置を備え、この複数の大領域測定装置は一定の間隔だけ互いに離隔されると共に、その間隔が固定されることを特徴とする請求項18に記載の光学式マーカーを用いた三次元測定データ自動整列装置。
- 前記光学式マーカー発生手段は、
X軸方向へ複数個配列された直射光を発生させるの光源と、
Y軸方向へ複数個配列された直射光を発生させるの光源と、
前記X軸の光源から発生した直射光を反射し、前記測定対象物の表面に投影するX軸の多角形のポリゴンミラーと、
前記Y軸の光源から発生した直射光を反射し、前記測定対象物の表面に投影するY軸の多角形のポリゴンミラーと、
前記X軸及びY軸の多角形のポリゴンミラーをそれぞれ回転させる回転メカニズムと、
前記X軸及びY軸の光源に対する点滅を制御する光源点滅制御部と、
を含んで構成されたことを特徴とする請求項1項ないし請求項19項のうちのいずれか一項に記載の光学式マーカーを用いた三次元測定データ自動整列装置。 - 映像獲得手段を、測定対象物の特定領域における映像を獲得するのに適した位置へと移動させる段階と;
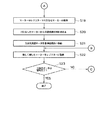
マーカー発生手段を点滅駆動し、光学式マーカーが測定対象物の表面に投影されるようにし、映像獲得手段で、光学式マーカーが投影された測定対象物の特定領域に対する二次元映像を獲得する段階;
三次元投影手段で前記測定対象物の表面に模様パターンが投影されるようにし、前記映像獲得手段で模様パターンが投影された測定対象物の特定領域に対する三次元の測定データを獲得する段階及び;
前記映像獲得手段によって獲得された二次元映像と三次元測定データとの関係からマーカーの三次元の位置を抽出し、各三次元測定データによるマーカーの位置から三次元測定データの相対的な位置を探して各測定データを整列させる段階;
からなることを特徴とする光学式マーカーを用いた三次元測定データ自動整列方法。 - 前記映像獲得手段で測定対象物の特定領域に対する二次元映像を獲得する段階は、前記マーカー発生手段で光学式マーカーを点灯されるようにして、前記映像獲得手段で測定対象物の特定領域からマーカーが含まれている二次元映像を一次的に獲得する段階と、
光学式マーカーが消灯されるようにして、測定対象物の同一領域からマーカーが含まれていない二次元映像を二次的に獲得する段階と、
を含んでなることを特徴とする請求項21に記載の光学式マーカーを用いた三次元測定データ自動整列方法。 - 前記二次元映像は、前記測定対象物の同一領域に対し、一次的に獲得されたマーカーが含まれた二次元映像と、二次的に獲得されたマーカーが含まれていない二次元映像とを映像処理して抽出することを特徴とする請求項22に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
- 前記映像獲得手段で測定対象物の特定領域に対する二次元映像を獲得する段階は、光学式マーカーが全部消灯された状態で、測定対象物の特定領域を撮影して基本映像を獲得する段階と、
前記マーカー発生手段で複数の光学式マーカーを既に決められた順序により、個別的でかつ順次的に投影されるようにすると共に、個別的でかつ順次的なマーカーの投影状態ごとに、映像獲得手段で個別的に映像を撮影する段階及び、
前記光学式マーカーの数に対応する個数で撮影された各映像データを、前記基本映像データと比較し、マーカーの二次元の位置を抽出する段階、
を含んでなることを特徴とする請求項21に記載の光学式マーカーを用いた三次元測定データ自動整列方法。 - 前記映像獲得手段で測定対象物の特定領域に対する二次元映像を獲得する段階は、前記マーカー発生手段における複数の光学式マーカーの二進化のため、既に決められたグループ別に重複分割し、光学式マーカーを各グループ別に順次的に点灯させる段階と、
前記光学式マーカーのグループ数に対応する個数で獲得された複数の映像データに含まれたグループ別のマーカーによる二進化情報を検索し、各マーカーにおける固有のIDとして二次元の位置を抽出する段階と、
を含んでなることを特徴とする請求項21に記載の光学式マーカーを用いた三次元測定データ自動整列方法。 - 前記映像獲得手段で模様パターンが投影された測定対象物の特定領域に対する三次元の測定データを獲得する段階は、前記三次元投影手段で模様パターンを投影する際、前記マーカー発生手段で光学式マーカーが発生されないようにすることを特徴とする請求項21に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
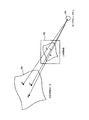
- 前記映像獲得手段によって獲得された二次元映像と三次元の測定データとの関係からマーカーの三次元の位置を抽出する段階は、前記映像獲得手段のカメラのレンズ中心から二次元映像データにおける任意の三つのマーカーに対する座標値と一直線に位置する三次元測定データ上における任意の三次元座標値を推定することにより、該当マーカーの三次元の位置を探すようになることを特徴とする請求項21に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
- 前記各三次元測定データによるマーカーの位置から三次元測定データの相対的な位置を探して各測定データを整列させる段階は、マーカーの三次元の位置から互いに重なるように隣接した三次元測定データの領域別に対となるマーカーを検索する段階と、
対となるマーカーによって各三次元測定データの整列のための位置変換行列を求める段階と、
各三次元測定データのうち、一つの測定データを基準座標系とし、前記の求められた位置変換行列により、各測定データを移動させて整列する段階と、
を含んでなることを特徴とする請求項21に記載の光学式マーカーを用いた三次元測定データ自動整列方法。 - 前記三次元測定データの領域別に対となるマーカーを検索する段階は、マーカーの空間上における相対的な三次元の位置情報と共に、マーカー又はマーカーの周囲で平均垂直ベクトル情報を用いて互いに一致する対を探すことで、隣接した測定データを探すようになることを特徴とする請求項28に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
- 前記三次元測定データの領域別に対となるマーカーを検索する段階は、マーカーの空間上における相対的な三次元の位置情報と共に、三次元データの中で、マーカーの周囲にある追加的な基準点を選択し、マーカーの対を探すようになることを特徴とする請求項28に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
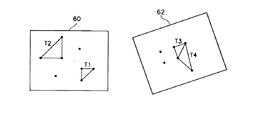
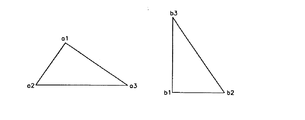
- 前記三次元測定データの領域別に対となるマーカーを検索する段階は、それぞれの三次元測定データからのマーカー間における相対的な位置情報を用い、マーカーによって形成される空間上の三つの点で三角形を形成すると共に、三角形の辺の長さを求め、各辺の長さを降順に整列し、各辺の長さ及び順序を比較することによってマーカーの対を探すようになることを特徴とする請求項28に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
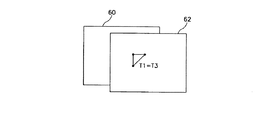
- 前記一つの三次元測定データを基準座標系として、各測定データを移動させて整列する段階は、各測定データのマーカーによって形成される三つの点による三角形の頂点及び辺に関する情報をもとに、基準座標系の三角形を基準として頂点の位置を一致させる変換を行う段階と、
一致した頂点の位置を共有するそれぞれの辺を一致させる回転変換を行う段階及び、
一致する辺を回転軸として、一致する辺に含まれていない頂点を基準座標系の頂点に回転させ、各三角形を一致させる段階、
を含んでなることを特徴とする請求項28に記載の光学式マーカーを用いた三次元測定データ自動整列方法。 - 前記測定対象物の表面のうち、測定対象の全体領域に対して区間距離を既に知っている複数の地点から複数の二次元映像を獲得する段階と、前記測定対象の全体領域に対する複数の二次元映像情報と、既に知っているその測定地点間の距離情報とを演算し、各マーカーの三次元の位置を算出する段階と、前記の算出された各マーカーの三次元の位置を絶対座標系に設定する段階とをさらに含んでなり、
前記各三次元測定データによるマーカーの位置から三次元測定データの相対的な位置を探して各測定データを整列させる段階は、マーカーの三次元の位置から互いに重なるように獲得された、隣接した三次元測定データの領域別に対となるマーカーを検索する段階と、対となるマーカーによって各三次元測定データの整列のための位置変換行列を求める段階と、前記求められた位置変換行列により、各測定データを移動させて前期絶対座標系に整列する段階とを含んでなることを特徴とする請求項21に記載の光学式マーカーを用いた三次元測定データ自動整列方法。 - 前記映像獲得手段を通じ、映像データを撮影した後、他の領域を撮影するために前記マーカー発生手段を点灯制御する際、以前に撮影した領域を指示する光学式マーカーを周期的に繰り返して点滅するように制御することを特徴とする請求項21に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
- 前記映像獲得手段を通じ、映像データを撮影した後、他の領域を撮影するために前記マーカー発生手段を点灯制御する際、既に撮影した領域を指示する光学式マーカーと、まだ撮影していない領域を指示する光学式マーカーとの色相をそれぞれ異なるように発生させるように制御することを特徴とする請求項22に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
- 測定対象物を中心に、映像獲得手段と三次元投影手段及びマーカー発生手段をそれぞれ複数個配列する段階と、
前記複数のマーカー発生手段を点滅駆動して、光学式マーカーが測定対象物の表面に投影されるようにすると同時に、前記複数の映像獲得手段で光学式マーカーが投影された測定対象物の特定領域に対する二次元映像をそれぞれ獲得する段階と、
前記複数の三次元投影手段で前記測定対象物の表面に模様パターンが投影されるようにし、前記複数の映像獲得手段で模様パターンが投影された測定対象物の特定領域に対する三次元測定データをそれぞれ獲得する段階及び、
前記複数の映像獲得手段によって獲得された各二次元映像と三次元測定データとの関係から各マーカーの三次元の位置を抽出し、各三次元測定データによるマーカーの位置から各三次元測定データの相対的な位置を探して各測定データを整列する段階、
からなることを特徴とする光学式マーカーを用いた三次元測定データ自動整列方法。 - 測定対象物を中心に、映像獲得手段と三次元投影手段及びマーカー発生手段をそれぞれ複数個配列する段階と、
前記複数のマーカー発生手段を点滅制御して複数の光学式マーカーを前記基準物体に投影すると共に、前記複数の映像獲得手段と三次元投影手段を制御し、前記基準物体に対する二次元映像と三次元測定データをそれぞれ獲得し、この獲得された各二次元映像と三次元測定データとから各領域別のマーカーの三次元位置を抽出し、この抽出されたマーカーの三次元の位置から互いに重なる領域別に対となるマーカーを検索し、対となるマーカーによって位置変換行列を求めるキャリブレーション段階と、
前記複数の映像獲得手段で測定対象物の特定領域に対する二次元映像をそれぞれ獲得すると共に、前記複数の三次元投影手段で前記測定対象物の表面に模様パターンが投影されるようにし、前記複数の映像獲得手段で模様パターンが投影された測定対象物の特定領域に対する三次元測定データをそれぞれ獲得する段階及び、
前記三次元測定データを前記キャリブレーション段階で求められた位置変換行列によって整列する段階、
を含んでなることを特徴とする光学式マーカーを用いた三次元測定データ自動整列方法。 - 前記キャリブレーション段階は、測定対象物に対する二次元映像及び三次元データを獲得する以前に、毎回行うようになることを特徴とする請求項37に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
- 前記キャリブレーション段階は最初の一回だけ実施し、次回の測定対象物に対する三次元測定データを整列する時も、最初実施されたキャリブレーション段階で求められた位置変換行列を用いるようになることを特徴とする請求項37に記載の光学式マーカーを用いた三次元測定データ自動整列方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20020043830 | 2002-07-25 | ||
| KR10-2003-0022624A KR100502560B1 (ko) | 2002-07-25 | 2003-04-10 | 광학식 마커를 이용한 3차원 측정 데이터 자동 정렬장치및 그 방법 |
| PCT/KR2003/001087 WO2004011876A1 (en) | 2002-07-25 | 2003-06-03 | Apparatus and method for automatically arranging three dimensional scan data using optical marker |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005534026A true JP2005534026A (ja) | 2005-11-10 |
| JP4226550B2 JP4226550B2 (ja) | 2009-02-18 |
Family
ID=31190416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004524349A Expired - Fee Related JP4226550B2 (ja) | 2002-07-25 | 2003-06-03 | 光学式マーカーを用いた三次元測定データ自動整列装置及びその方法 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP4226550B2 (ja) |
| CN (1) | CN1300551C (ja) |
| AU (1) | AU2003241194A1 (ja) |
| WO (1) | WO2004011876A1 (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006528770A (ja) * | 2003-07-24 | 2006-12-21 | コグニテンス リミテッド | 対象物の3次元表面再構築の方法およびシステム |
| WO2007138904A1 (ja) * | 2006-05-30 | 2007-12-06 | Panasonic Corporation | パターン投影光源および複眼測距装置 |
| JP2008500524A (ja) * | 2004-05-25 | 2008-01-10 | アンシディス | 表面歪み測定装置 |
| JP2009511881A (ja) * | 2005-10-07 | 2009-03-19 | コグネックス・コーポレイション | 実用的な3dビジョンシステムの方法および装置 |
| JP2009270915A (ja) * | 2008-05-07 | 2009-11-19 | Kagawa Univ | 3次元形状の計測方法および装置 |
| JP2010217083A (ja) * | 2009-03-18 | 2010-09-30 | Honda Motor Co Ltd | 非接触形状測定装置 |
| JP2011064579A (ja) * | 2009-09-17 | 2011-03-31 | Konica Minolta Sensing Inc | 三次元測定システムおよび三次元測定方法 |
| US8126260B2 (en) | 2007-05-29 | 2012-02-28 | Cognex Corporation | System and method for locating a three-dimensional object using machine vision |
| US8170329B2 (en) | 2008-07-18 | 2012-05-01 | Fuji Xerox Co., Ltd. | Position measuring system, position measuring method and computer readable medium |
| JP2013079960A (ja) * | 2011-09-30 | 2013-05-02 | Steinbichler Optotechnik Gmbh | 対象物の三次元座標を決定する方法および装置 |
| JP2013525821A (ja) * | 2010-05-07 | 2013-06-20 | 深▲せん▼泰山在線科技有限公司 | 構造化光測定方法及びシステム |
| JP5307549B2 (ja) * | 2006-11-08 | 2013-10-02 | 有限会社テクノドリーム二十一 | 3次元形状計測方法およびその装置 |
| US9124873B2 (en) | 2010-12-08 | 2015-09-01 | Cognex Corporation | System and method for finding correspondence between cameras in a three-dimensional vision system |
| US9393694B2 (en) | 2010-05-14 | 2016-07-19 | Cognex Corporation | System and method for robust calibration between a machine vision system and a robot |
| US9533418B2 (en) | 2009-05-29 | 2017-01-03 | Cognex Corporation | Methods and apparatus for practical 3D vision system |
| US9734419B1 (en) | 2008-12-30 | 2017-08-15 | Cognex Corporation | System and method for validating camera calibration in a vision system |
| KR101788131B1 (ko) * | 2016-01-18 | 2017-10-19 | 한화첨단소재 주식회사 | 전기자동차의 열경화성수지 조성물 시트의 금형 안착위치를 표시하는 장치 |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0615956D0 (en) * | 2006-08-11 | 2006-09-20 | Univ Heriot Watt | Optical imaging of physical objects |
| KR20080043047A (ko) * | 2006-11-13 | 2008-05-16 | 주식회사 고영테크놀러지 | 새도우 모아레를 이용한 3차원형상 측정장치 |
| CA2606267A1 (fr) * | 2007-10-11 | 2009-04-11 | Hydro-Quebec | Systeme et methode de cartographie tridimensionnelle d'une surface structurelle |
| DE102009032771B4 (de) * | 2009-07-10 | 2017-06-29 | Gom Gmbh | Messeinrichtung und Verfahren zum dreidimensionalen optischen Vermessen von Objekten |
| CN101813461B (zh) * | 2010-04-07 | 2011-06-22 | 河北工业大学 | 基于复合彩色条纹投影的绝对相位测量方法 |
| CN102346011A (zh) * | 2010-07-29 | 2012-02-08 | 上海通用汽车有限公司 | 测量工具和测量方法 |
| US9163938B2 (en) | 2012-07-20 | 2015-10-20 | Google Inc. | Systems and methods for image acquisition |
| DE102013203399A1 (de) * | 2013-02-28 | 2014-08-28 | Siemens Aktiengesellschaft | Verfahren und Projektionsvorrichtung zur Markierung einer Oberfläche |
| US9789462B2 (en) * | 2013-06-25 | 2017-10-17 | The Boeing Company | Apparatuses and methods for accurate structure marking and marking-assisted structure locating |
| DE102013110667B4 (de) | 2013-09-26 | 2018-08-16 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zum bildgebenden zerstörungsfreien Prüfen von dreidimensionalen Werkstücken und Vorrichtung zur Durchführung eines derartigen Verfahrens |
| CN104315975A (zh) * | 2014-10-22 | 2015-01-28 | 合肥斯科尔智能科技有限公司 | 一种线性三维高精度扫描方法 |
| KR101612254B1 (ko) * | 2014-10-30 | 2016-04-15 | 한국생산기술연구원 | 단방향으로 회전하는 폴리곤미러를 구비하는 입체조형장비의 멀티채널헤드어셈블리 및 이를 이용하는 입체조형장비. |
| CN104359405B (zh) * | 2014-11-27 | 2017-11-07 | 上海集成电路研发中心有限公司 | 三维扫描装置 |
| CN105232161B (zh) * | 2015-10-16 | 2017-05-17 | 北京天智航医疗科技股份有限公司 | 一种手术机器人标志点识别定位方法 |
| US20170116462A1 (en) * | 2015-10-22 | 2017-04-27 | Canon Kabushiki Kaisha | Measurement apparatus and method, program, article manufacturing method, calibration mark member, processing apparatus, and processing system |
| US20180108178A1 (en) * | 2016-10-13 | 2018-04-19 | General Electric Company | System and method for measurement based quality inspection |
| DE102017109854A1 (de) * | 2017-05-08 | 2018-11-08 | Wobben Properties Gmbh | Verfahren zur Referenzierung mehrerer Sensoreinheiten und zugehörige Messeinrichtung |
| CN107169964B (zh) * | 2017-06-08 | 2020-11-03 | 广东嘉铭智能科技有限公司 | 一种检测弧面反光镜片表面缺陷的方法和装置 |
| CN108225218A (zh) * | 2018-02-07 | 2018-06-29 | 苏州镭图光电科技有限公司 | 基于光学微机电系统的三维扫描成像方法及成像装置 |
| DE102020213141A1 (de) * | 2020-10-19 | 2022-04-21 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Generierung einer optischen Markierung, Verfahren zur Erkennung einer optischen Markierung und Markierungsvorrichtung mit der optischen Markierung |
| CN112461138B (zh) * | 2020-11-18 | 2022-06-28 | 苏州迈之升电子科技有限公司 | 一种交叉扫描测量方法及其测量光栅和应用 |
| KR102780525B1 (ko) * | 2024-11-19 | 2025-03-11 | 주식회사 심작 | 유물을 손상시키지 않고 유물의 형상 및 색상을 복원하는 방법 및 그 장치 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5276613A (en) * | 1988-12-14 | 1994-01-04 | Etienne Schlumberger | Process and device for coordinating several images of the same object |
| US5227985A (en) * | 1991-08-19 | 1993-07-13 | University Of Maryland | Computer vision system for position monitoring in three dimensions using non-coplanar light sources attached to a monitored object |
| US6239868B1 (en) * | 1996-01-02 | 2001-05-29 | Lj Laboratories, L.L.C. | Apparatus and method for measuring optical characteristics of an object |
| RU2123718C1 (ru) * | 1996-09-27 | 1998-12-20 | Кузин Виктор Алексеевич | Способ ввода информации в компьютер |
-
2003
- 2003-06-03 AU AU2003241194A patent/AU2003241194A1/en not_active Abandoned
- 2003-06-03 WO PCT/KR2003/001087 patent/WO2004011876A1/en not_active Ceased
- 2003-06-03 JP JP2004524349A patent/JP4226550B2/ja not_active Expired - Fee Related
- 2003-06-03 CN CNB038178915A patent/CN1300551C/zh not_active Expired - Fee Related
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006528770A (ja) * | 2003-07-24 | 2006-12-21 | コグニテンス リミテッド | 対象物の3次元表面再構築の方法およびシステム |
| JP2008500524A (ja) * | 2004-05-25 | 2008-01-10 | アンシディス | 表面歪み測定装置 |
| JP2009511881A (ja) * | 2005-10-07 | 2009-03-19 | コグネックス・コーポレイション | 実用的な3dビジョンシステムの方法および装置 |
| US8111904B2 (en) | 2005-10-07 | 2012-02-07 | Cognex Technology And Investment Corp. | Methods and apparatus for practical 3D vision system |
| WO2007138904A1 (ja) * | 2006-05-30 | 2007-12-06 | Panasonic Corporation | パターン投影光源および複眼測距装置 |
| US8434874B2 (en) | 2006-05-30 | 2013-05-07 | Panasonic Corporation | Pattern projection light source and compound-eye distance measurement apparatus |
| JP5307549B2 (ja) * | 2006-11-08 | 2013-10-02 | 有限会社テクノドリーム二十一 | 3次元形状計測方法およびその装置 |
| US8126260B2 (en) | 2007-05-29 | 2012-02-28 | Cognex Corporation | System and method for locating a three-dimensional object using machine vision |
| JP2009270915A (ja) * | 2008-05-07 | 2009-11-19 | Kagawa Univ | 3次元形状の計測方法および装置 |
| US8170329B2 (en) | 2008-07-18 | 2012-05-01 | Fuji Xerox Co., Ltd. | Position measuring system, position measuring method and computer readable medium |
| US9734419B1 (en) | 2008-12-30 | 2017-08-15 | Cognex Corporation | System and method for validating camera calibration in a vision system |
| JP2010217083A (ja) * | 2009-03-18 | 2010-09-30 | Honda Motor Co Ltd | 非接触形状測定装置 |
| US9533418B2 (en) | 2009-05-29 | 2017-01-03 | Cognex Corporation | Methods and apparatus for practical 3D vision system |
| JP2011064579A (ja) * | 2009-09-17 | 2011-03-31 | Konica Minolta Sensing Inc | 三次元測定システムおよび三次元測定方法 |
| JP2013525821A (ja) * | 2010-05-07 | 2013-06-20 | 深▲せん▼泰山在線科技有限公司 | 構造化光測定方法及びシステム |
| US9393694B2 (en) | 2010-05-14 | 2016-07-19 | Cognex Corporation | System and method for robust calibration between a machine vision system and a robot |
| US9124873B2 (en) | 2010-12-08 | 2015-09-01 | Cognex Corporation | System and method for finding correspondence between cameras in a three-dimensional vision system |
| JP2013079960A (ja) * | 2011-09-30 | 2013-05-02 | Steinbichler Optotechnik Gmbh | 対象物の三次元座標を決定する方法および装置 |
| KR101788131B1 (ko) * | 2016-01-18 | 2017-10-19 | 한화첨단소재 주식회사 | 전기자동차의 열경화성수지 조성물 시트의 금형 안착위치를 표시하는 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1672013A (zh) | 2005-09-21 |
| WO2004011876A1 (en) | 2004-02-05 |
| AU2003241194A1 (en) | 2004-02-16 |
| JP4226550B2 (ja) | 2009-02-18 |
| CN1300551C (zh) | 2007-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4226550B2 (ja) | 光学式マーカーを用いた三次元測定データ自動整列装置及びその方法 | |
| CN106403845B (zh) | 三维传感器系统及三维数据获取方法 | |
| JP5922572B2 (ja) | 実用型3dビジョンシステム装置およびその方法 | |
| EP1277026B1 (en) | Combined stereovision, color 3d digitizing and motion capture system | |
| JP6736423B2 (ja) | 三次元測定装置 | |
| US7456842B2 (en) | Color edge based system and method for determination of 3D surface topology | |
| US20070091174A1 (en) | Projection device for three-dimensional measurement, and three-dimensional measurement system | |
| US20160086343A1 (en) | Contour line measurement apparatus and robot system | |
| KR100502560B1 (ko) | 광학식 마커를 이용한 3차원 측정 데이터 자동 정렬장치및 그 방법 | |
| US20100245851A1 (en) | Method and apparatus for high-speed unconstrained three-dimensional digitalization | |
| CN104854427A (zh) | 用于光学扫描和测量环境的装置 | |
| JP2012215394A (ja) | 三次元計測装置および三次元計測方法 | |
| CN112161619A (zh) | 位姿检测方法、三维扫描路径规划方法和检测系统 | |
| EP3069100B1 (en) | 3d mapping device | |
| EP1459035B1 (en) | Method for determining corresponding points in stereoscopic three-dimensional measurements | |
| CN105844701A (zh) | 序列图像三维建模方法 | |
| US6505148B1 (en) | Method for combining the computer models of two surfaces in 3-D space | |
| CN112415010A (zh) | 一种成像检测方法及系统 | |
| JP2007101197A (ja) | 物体探索装置,物体探索装置を備えるロボットシステム及び物体探索方法 | |
| CN117640915A (zh) | 用于改进选择特征扫描的有立体摄像机视野的激光扫描仪 | |
| Sansoni et al. | OPL-3D: A novel, portable optical digitizer for fast acquisition of free-form surfaces | |
| JP5375479B2 (ja) | 三次元測定システムおよび三次元測定方法 | |
| JP2017173142A (ja) | 画像処理装置、画像処理方法およびミクロジョイント切断システム | |
| US7046839B1 (en) | Techniques for photogrammetric systems | |
| JP2003065737A (ja) | 表面形状測定装置及びその方法、並びに表面状態図化装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081111 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081126 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111205 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |