JP2005297817A - 運転支援装置 - Google Patents
運転支援装置 Download PDFInfo
- Publication number
- JP2005297817A JP2005297817A JP2004118131A JP2004118131A JP2005297817A JP 2005297817 A JP2005297817 A JP 2005297817A JP 2004118131 A JP2004118131 A JP 2004118131A JP 2004118131 A JP2004118131 A JP 2004118131A JP 2005297817 A JP2005297817 A JP 2005297817A
- Authority
- JP
- Japan
- Prior art keywords
- driving
- driving operation
- vehicle
- automatic
- driver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Abstract
【課題】使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減し、接触事故を防止すること。
【解決手段】運転支援装置1内部の登録・修正処理部11は、カメラ33が撮影した画像と、運転者による運転操作とを関連付けて記憶部13に運転操作情報13aとして記憶する。また自動運転処理部12は、カメラ33が撮影した画像に基づいて運転操作情報13aから運転操作を読み出して動作制御系50のうち、アクセル51やステアリング53を操作して車両を自動的に走行させる。
【選択図】 図1
【解決手段】運転支援装置1内部の登録・修正処理部11は、カメラ33が撮影した画像と、運転者による運転操作とを関連付けて記憶部13に運転操作情報13aとして記憶する。また自動運転処理部12は、カメラ33が撮影した画像に基づいて運転操作情報13aから運転操作を読み出して動作制御系50のうち、アクセル51やステアリング53を操作して車両を自動的に走行させる。
【選択図】 図1
Description
この発明は、車両の走行にかかる情報を収集し、該収集した情報をもとに車両の運転を支援する運転支援装置に関し、特に、使用頻度の高い道路において車両の運転操作を自動実行可能な運転支援装置に関する。
近年、車両の運転に関する各種情報を取得し、運転者への情報提供や運転操作の補助、車両動作への介入を行なう運転支援装置が考案されている。例えば、特許文献1は、車庫入れ時に車両が走行可能な走行路およびベストウェイを絶対座標上で記憶し、車庫入れに必要とされる車両のステアリング操作量をファジィ推論する技術を開示している。
また、特許文献2は、完全に自動走行可能な車両に対し、乗員が順次同意あるいは不同意等の首振りをするだけで行き先を指示可能とする技術を開示している。
さらに、特許文献3は、自動車の走行特性を学習によって制御する学習制御自動車において、特定のドライバーが運転していると判定したときにのみ学習制御を実行し、学習プログラムが望ましくない方向に補正されることを防止する技術を開示している。
ところで、車両を運転する場合、例えは車庫周辺の道路など頻繁に通行する道路が存在し、通行の度に同様の運転操作を行なう必要があった。このような単一で、頻度の高い運転操作は、車両側で自動的に実行されることが望ましい。
特に、車庫近傍は狭路であることが多く、運転操作にかかる運転者の負荷が大きくなるとともに、障害物との接触事故などが発生しやすいという問題点があった。
この発明は、上述した従来技術による問題点を解消し、課題を解決するためになされたものであり、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、接触事故を防止する運転支援装置を提供することを目的とする。
上述した課題を解決し、目的を達成するため、請求項1の発明に係る運転支援装置は、車両の走行にかかる情報を収集し、該収集した情報をもとに車両の運転を支援する運転支援装置であって、自車両周辺の画像を撮影する撮影手段と、過去に前記撮影手段が撮影した画像と運転者による運転操作状態とを対応付けた運転操作情報を記憶する記憶手段と、現在に前記撮影手段が撮影することによって得られた画像に基づき、前記記憶手段から前記運転操作情報を読み出して自車両の運転操作を自動実行する自動運転手段と、を備えたことを特徴とする。
この請求項1の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行する。
また、請求項2の発明に係る運転支援装置は、請求項1の発明において、運転者による運転操作を検出した場合に前記自動実行を中止することを特徴とする。
この請求項2の発明によれば運転支援装置は、車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、運転操作の自動実行中に運転者が運転操作を実行した場合には自動実行を中止する。
また、請求項3の発明に係る運転支援装置は、請求項2の発明において、前記自動運転手段は、ブレーキ以外の運転操作手段が運転者によって操作された場合に前記自動実行を中止することを特徴とする。
この請求項3の発明によれば運転支援装置は、車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、運転者がブレーキ以外の運転操作手段を操作した場合に自動実行を中止する。
また、請求項4の発明に係る運転支援装置は、請求項1,2または3の発明において、自車両周辺の障害物を検出する障害物検出手段をさらに備え、前記自動運転手段は、前記障害物検出手段か障害物を検出した場合に前記自動実行を中止することを特徴とする。
この請求項4の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、自車両の進行方向に障害物が存在する場合に自動実行を中止する。
また、請求項5の発明に係る運転支援装置は、請求項1〜4の発明において、前記自動運転手段は、前記撮影手段が撮影した画像が、前記運転装置情報として記憶した画像と異なる場合に、前記自動実行を中止することを特徴とする。
この請求項5の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、運転操作の自動実行中に撮影した画像が運転操作情報として記憶した画像と異なる場合に自動実行を中止する。
また、請求項6の発明に係る運転支援装置は、請求項1〜5の発明において、前記運転操作情報は、運転操作に伴う車両挙動をさらに対応付けて記憶し、前記自動運転手段は、前記自動実行によって生じた車両挙動が前記運転操作情報として記憶した車両挙動と異なる場合に、前記自動実行を中止することを特徴とする。
この請求項6の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、運転操作の自動実行によって生じた車両の挙動が予め運転操作情報に記憶した車両挙動と異なる場合に運転操作の自動実行を中止する。
また、請求項7の発明に係る運転支援装置は、請求項1〜6の発明において、自車両周辺の路面における積雪を検出する積雪検出手段をさらに備え、前記自動運転手段は、前記積雪検出手段が積雪を検出した場合に前記自動実行を中止することを特徴とする。
この請求項7の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、路面における積雪を検出した場合に運転操作の自動実行を中止する。
また、請求項8の発明に係る運転支援装置は、請求項7の発明において、前記積雪検出手段は、音波レーダであることを特徴とする。
この請求項8の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、音波レーダによって路面における積雪の有無を判定し、積雪を検出した場合には運転操作の自動実行を中止する。
また、請求項9の発明に係る運転支援装置は、請求項1〜8の発明において、自車両周辺の路面における凍結を検出する凍結検出手段をさらに備え、前記自動運転手段は、前記凍結検出手段が凍結を検出した場合に、前記自動実行を中止することを特徴とする。
この請求項9の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、路面の凍結を検出した場合に運転操作の自動実行を中止する。
また、請求項10の発明に係る運転支援装置は、請求項1〜9の発明において、自車両の位置情報を取得する位置情報取得手段をさらに備え、前記運転操作情報は前記位置情報をさらに関連付けて記憶し、前記自動運転手段は前記運転操作情報として記憶された位置情報をさらに用いて運転操作を自動実行することを特徴とする。
この請求項10の発明によれば運転支援装置は、自車両周辺の画像および自車両の位置情報と運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行する。
また、請求項11の発明に係る運転支援装置は、請求項1〜10の発明において、前記運転操作情報の修正要求を受け付けた場合に、前記撮影手段が撮影した画像と運転者による運転操作とを対応付けた運転操作情報を再度作成し、修正終了を要求された場合に、当該再作成した運転操作情報によって既存の運転操作情報の対応箇所を置き換える修正処理手段をさらに備えたことを特徴とする。
この請求項11の発明によれば運転支援装置は、自車両周辺の画像および自車両の位置情報と運転者による運転操作と対応付けるとともに、部分的に修正可能に記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行する。
請求項1の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、接触事故を防止可能な運転支援装置を得ることができるという効果を奏する。
また、請求項2の発明によれば運転支援装置は、車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、運転操作の自動実行中に運転者が運転操作を実行した場合には自動実行を中止するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減し、接触事故を防止するとともに、運転者による運転操作が必要な場合には即座に手動操作へ切替え可能な運転支援装置を得ることができるという効果を奏する。
また、請求項3の発明によれば運転支援装置は、車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、運転者がブレーキ以外の運転操作手段を操作した場合に自動実行を中止するので、ブレーキを運転者に操作させて危険回避を実現すると共に、ステアリングなどを自動制御することで使用頻度の高い道路の走行を自動化可能な運転支援装置を得ることができるという効果を奏する。
また、請求項4の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、自車両の進行方向に障害物が存在する場合に自動実行を中止するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、接触事故を防止可能な運転支援装置を得ることができるという効果を奏する。
また、請求項5の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、運転操作の自動実行中に撮影した画像が運転操作情報として記憶した画像と異なる場合に自動実行を中止するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、画像処理によって接触事故を防止可能な運転支援装置を得ることができるという効果を奏する。
また、請求項6の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、運転操作の自動実行によって生じた車両の挙動が予め運転操作情報に記憶した車両挙動と異なる場合に運転操作の自動実行を中止するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、車両や路面の異常を検出して事故を防止可能な運転支援装置を得ることができるという効果を奏する。
また、請求項7の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、路面における積雪を検出した場合に運転操作の自動実行を中止するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、積雪時の運転操作を運転者に任せることで事故を防止可能な運転支援装置を得ることができるという効果を奏する。
また、請求項8の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、音波レーダによって路面における積雪の有無を判定し、積雪を検出した場合には運転操作の自動実行を中止するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、積雪を効果的に検出して接触事故を防止可能な運転支援装置を得ることができるという効果を奏する。
また、請求項9の発明によれば運転支援装置は、自車両周辺の画像を撮影して運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するとともに、路面の凍結を検出した場合に運転操作の自動実行を中止するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、路面凍結時には運転者に運転操作を実行させることで事故を防止可能な運転支援装置を得ることができるという効果を奏する。
また、請求項10の発明によれば運転支援装置は、自車両周辺の画像および自車両の位置情報と運転者による運転操作と対応付けて記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、接触事故を防止可能な運転支援装置を得ることができるという効果を奏する。
また、請求項11の発明によれば運転支援装置は、自車両周辺の画像および自車両の位置情報と運転者による運転操作と対応付けるとともに、部分的に修正可能に記憶し、記憶した運転操作情報を読み出して自車両の運転操作を自動実行するので、使用頻度の高い道路での走行の理想的な運転操作を簡易に作成して運転操作を自動化し、運転者にかかる負荷を軽減可能な運転支援装置を得ることができるという効果を奏する。
以下に添付図面を参照して、この発明に係る運転支援装置の好適な実施例を詳細に説明する。
図1は、本発明の実施例である運転支援装置1の概要構成を示す概要構成図である。同図に示すように、運転支援装置1は、ナビゲーション装置3、入力装置32、カメラ33、通信装置34、車速センサ35、加速度センサ36、温度センサ37、音波レーダ38、ミリ波レーダ39、表示系40および動作制御系50と接続している。
ナビゲーション装置3は、自車両の走行経路の設定および誘導を行なう装置である。具体的には、ナビゲーション装置3は、GPS(Global Positioning System)通信部31によって自車両の現在位置を取得し、地図データ3aを用いて自車両が走行している道路を特定し、表示系40内部のディスプレイ41およびスピーカ42を用いて経路誘導を実行する。
入力装置32は、運転者によって操作され、運転操作の登録や、自動運転の要求に用いられる。この入力装置32は、スイッチなどによって実現してもよいし、タッチパネルディスプレイであってもよい。また、運転者の音声による操作入力を受け付ける音声認識装置であってもよい。
カメラ33は、自車両の前方を撮影する撮影手段であり、通信装置34は、車両間や路車間の通信、また、所定の情報管理センタやネットワークへの接続などを実現する。
車速センサ35は、自車両の速度を測定し、加速度センサ36は、自車両にかかる加速度を測定する。一方、温度センサ37は、自車両外部、特に路面の温度を検出する検出部であり、路面が凍結しているか否かの判断に使用する。この温度センサ37としては、例えばサーモグラフィなどを用いることが好適である。
音波レーダ38およびミリ波レーダ39は、それぞれ音波と電波によって自車両周辺に存在する障害物を検出する。また、雪は音波を吸収するので、音波レーダ38は、路面の積雪を検出する積雪検出手段としても機能する。
表示系40は、ディスプレイ41およびスピーカ42を有し、ナビゲーション3の出力や運転支援装置1の出力など、各種車載装置で共用される。また、動作制御系50は、車両の動作を制御する制御系である。具体的には、アクセル51、ブレーキ52、ステアリング53、シフト54などが動作制御系50に含まれる。
運転支援装置1は、その内部に登録・修正処理部11、自動運転処理部12および記憶部13を有する。登録・修正処理部11は、運転者が入力装置32から運転操作の登録を要求した場合に、カメラ33による自車両周辺の画像の撮影を実行するとともに、運転者による運転装置、すなわちアクセル51、ブレーキ52、ステアリング53、シフト54などの操作状態を取得する。そして、カメラ33が撮影した画像と、運転者による運転操作とを関連付けて記憶部13に運転操作情報13aとして記憶する。
一方、運転者が入力装置33から車両の自動運転を要求した場合、自動運転処理部12は、カメラ33による自車両周辺の画像の撮影を実行し、現在撮影することによって得られた画像に基づいて運転操作情報13aを読み出す。そして、読み出した運転情報13aに従って動作制御系50を制御し、車両の運転操作を自動実行する。
また、登録・修正処理部11は、運転者が入力装置32から運転操作情報13aの修正を要求した場合には、運転操作情報13aの全て、もしくは一部を修正する修正処理を実行する。
すなわち、記憶部13が記憶する運転操作情報13aは、画像によって道路を特定し、その道路を走行するための運転操作を保持するものである。そのため、運転者は、運転操作情報13aとして運転操作を登録したならば、以降その道路を走行する場合に運転操作を車両に自動実行させることができる。
この運転操作情報13aの具体例を図2に示す。同図では、画像データ(pic001〜pic006)、位置(pos001〜pos006)、ステアリング操作(ste001〜ste006)、アクセル操作(acc001〜acc006)、車両挙動(mov001〜mov006)を関連付けて記憶している。
ここで、位置(pos001〜pos006)は、ナビゲーション装置3がGPS通信部31を用いて特定した位置情報である。また、画像データ(pic001〜pic006)は、カメラ33によって撮影した画像である。この位置(pos001〜pos006)と画像データ(pic001〜pic006)とを組み合わせて使用することで、運転支援装置1は、自車両がどの道路を走行中であるか、また道路内のどの位置を走行中であるかを詳細に特定することができる。
また、ステアリング操作(ste001〜ste006)およびアクセル操作(acc001〜acc006)は、運転者が運転操作情報13aを登録する場合に実行した運転操作を示すものであり、自動運転処理部12は、位置(pos001〜pos006)および画像データ(pic001〜pic006)によって自車両の位置を特定した後、対応付けられたステアリング操作およびアクセル操作を実行する。
ここで、ブレーキ52については、自動運転の実行中であっても運転者に操作させ、運転者の状況判断に基づいて減速・停止を行なうことが好適であるので、図2に示した運転操作情報13aでは、ブレーキ操作は記憶していない。
また、シフト54については、既に車両の走行速度に基づいて自動的に切り替える技術が知られているので、図2に示した運転操作情報13aでは、シフト操作を記憶していない。
しかし、例えば下り勾配での自動運転など、ブレーキ操作やシフト操作を含めて記憶することが必要である場合には、運転操作情報13aにブレーキ操作およびシフト操作をさらに記憶させてもよい。
車両挙動(mov001〜mov006)は、運転者が、ステアリング操作(ste001〜ste006)およびアクセル操作(acc001〜acc006)を実行した場合の車両の挙動を示す情報である。この車両挙動(mov001〜mov006)としては、車速センサ35が取得した自車両の速度や、加速度センサ36が取得した自車両の加速度を用いることができる。
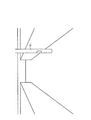
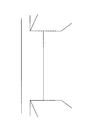
つぎに、車両走行およびカメラ33が取得する画像について、具体例を挙げて説明する。図3は、車両走行の具体例を説明する説明図である。同図において車両C0は、道路70を走行し(車両位置61,62)、電柱71の横を通過した(車両位置63)後、T字路を右折する(車両位置64)。その後、車庫72の横を一旦通過し(車両位置65)、後進して車庫入れを行なっている(車両位置66)。
この車両位置61〜66においてカメラ33が撮影した画像を図4〜9にそれぞれ示す。道路70を走行中(車両位置61〜63)においては、図4〜6に示すように、車両位置に応じて電柱71やT字路の画像内での位置、大きさが異なっている。また、T字路を右折後(車両位置64)は、図7に示すように車庫72が画像内に存在するが、その横を通過した時点(車両位置65)では、図8に示すように車庫72が見えない状態となっている。その後、図9に示すように、車庫72に駐車済みの状態における画像が得られることとなる。
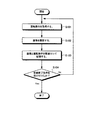
つぎに、運転支援装置1の処理動作について説明する。図10は、登録・修正処理部11による運転操作情報13aの登録処理を説明するフローチャートである。同図に示す処理フローは、入力装置32が運転者による運転操作情報13aの登録指示を受け付けた場合に開始する。
処理フローの開始後、登録・修正処理部11は、まず、動作制御系40から運転者による運転操作を取得する(ステップS101)とともにカメラ33による画像の撮影を実行する(ステップS102)。そして、取得した運転操作とカメラ33が撮影した画像とを関連付けて運転操作情報13aに登録する(ステップS103)。
その後、登録・修正処理部11は、入力装置32が運転者からの登録終了指示を受け付けたか否かを判定し(ステップS104)、登録終了指示を受け付けていなければ(ステップS104,No)、ステップS101〜S103の処理を繰り返す。そして、登録終了の指示を受け付けた場合に(ステップS104,Yes)、処理を終了する。
つづいて、自動運転処理部12による自動運転処理について図11のフローチャートを参照して説明する。同図に示す処理フローは、入力装置32が運転者からの自動運転開始指示を受け付けた場合に開始する。
処理フローの開始後、まず、自動運転処理部12は、音波レーダ38やミリ波レーダ39などの出力をもとに、自車両の進行方向に障害物が存在するか否かを判定する(ステップS201)。
その結果、自車両の進行方向に障害物を検出した場合(ステップS201,Yes)、自動運転処理部13は、自動運転が実行不可能であると判断して処理を終了する。この時、表示系40を用いた運転者への情報提供を併せて実行することが望ましい。
一方、自車両の進行方向に障害物が存在しなければ(ステップS201,No)、自動運転処理部13は、カメラ33による画像の撮影を実行し(ステップS202)、撮影した画像に最も近い画像を運転操作情報13aから検索する(ステップS203)。また、運転操作情報13aに位置情報が保持されている場合には、ナビゲーション装置3から自車両の位置を取得して、ステップS203における検索に利用することができる。
そして、自動運転処理部12は、運転操作情報13aから画像と運転操作情報とを読み出し(ステップS204)、撮影した画像と読み出した画像との差に基づいて、読み出した運転操作を補正して動作制御系50を制御し、車両の運転操作を自動実行する(ステップS205)。
その後、自動運転処理部12は、車速センサ35および加速度センサ36の出力から運転操作の結果生じた自車両の挙動を取得し、運転操作情報13aに記憶した挙動情報と比較する(ステップS206)。
その結果、自車両の挙動が運転操作情報13aに記憶した挙動と大きく異なるならば(ステップS206,No)、自車両もしくは路面に何らかの異常が発生している可能性があるので、自動運転処理を終了する。この時、表示系40を用いた運転者への情報提供を併せて実行することが望ましい。
一方、自車両の挙動が運転操作情報13aに記憶した挙動と略同一であるならば(ステップS206,Yes)、自動運転処理部12は、つぎに運転者による運転操作を受け付けたか否かを判定する(ステップS207)。
運転者による運転操作を受け付けた場合(ステップS207,Yes)、運転者による運転操作を優先するため、自動運転処理部13は、自動運転処理を終了する。
一方、運転者による運転操作を受け付けていない場合(ステップS207,No)、自動運転処理部13は、つぎに、運転操作情報に示された自動運転の終了位置に自車両が到達したか否かを判定する(ステップS208)。
その結果、自車両が自動運転の終了位置に到達していなければ(ステップS208,No)、自動運転処理部13は、再度ステップS201を実行し、自車両が自動運転の終了位置に到達した場合に(ステップS208,Yes)、自動運転処理を終了する。
ここで、自動運転の終了位置は、運転操作情報13aの登録時に予め設定しておく。この終了位置は、例えば入力装置32から登録終了指示を受け付けた時点での自車両の位置や画像を終了位置として設定すればよい。
また、図11に示したフローチャートでは、運転者による運転操作を検出した場合に自動運転を終了しているが、例えば運転者による運転操作を検出した場合には自動運転を休止して運転者の操作に従って車両を動作させ、運転者が運転操作を終了した場合に再度ステップS201から処理を開始するように構成してもよい。
また、図11に示したフローチャートでは、音波レーダ38やミリ波レーダ39などの出力をもとに、自車両の進行方向における障害物を検出し、障害物が存在する場合には自動運転を終了するように構成しているが、例えば、温度センサ37や音波レーダ38の出力から、路面に凍結や積雪が生じていることを検出した場合にも自動運転を終了するように構成してもよい。
さらに通信装置34によって天候の情報を取得し、凍結や積雪の可能性がある場合には、自動運転を行なわないように構成してもよい。また、車両の重量や車体の傾斜などを運転操作情報にさらに登録したならば、積載物などの変化によって登録時とは異なる車両の挙動が予想される場合には、自動運転を行なわないようにすることができる。
この自動実行中止の条件としては、例えば、ステアリング舵角に対応する車両方向の変更が認められなかった場合(自動実行中に水、凍結、雪、等によって車両方向が予期しない方向に陥った場合、などに生ずる)や、車両角度が操作記憶時とは大きく異なる場合(何らかの原因でのズレ等で脱輪した場合、などに生ずる)、自車両の位置が記憶した位置と大きく異なる場合(車両の軌跡が記憶時の軌跡から逸脱した場合などに生ずる)、などを用いることができる。
なお、車両の方向は、ジャイロなどによって取得することができ、車両角度は、チルトテーションセンサなどによって取得することができる。
このように、運転支援装置1は運転者による運転操作を記憶し、同一の操作を自動的に繰り返して実行可能である。ところで、運転操作の登録時に、例えば歩行者を回避するなどの運転を行なった場合、運転操作を自動実行する際に歩行者の有無に関わらず歩行者回避動作を繰り返すこととなる。
すなわち、登録時の操作は必ずしもその全てが厳密に再実行されるべき操作ではないので、運転操作情報13aは、その一部を選択的に修正可能であることが望ましい。
また、運転支援装置1では、カメラ33によって撮影した画像に基づいて実行すべき運転操作の検索を行なっているので、登録時の画像と自動実行時の画像とか大きく異なる場合には、自動運転を終了することとなる。
そのため、例えば登録時に対向車両とのすれ違いが発生した場合、登録時に撮影した画像には対向車両が写り、自動運転の実行時に撮影した画像と登録画像との差が大きくなる。そのため、自動運転が適切に実行できない可能性がある。
このような場合にも、運転操作情報13aの一部(対向車両とのすれ違い前後)を選択的に修正可能であることが求められる。
図12は、登録・修正処理部11による運転操作情報13aの修正処理を説明するフローチャートである。同図に示す処理フローは、入力装置32が運転者から運転操作情報13aの修正指示を受け付けた場合に開始する。
処理フローの開始後、登録・修正処理部11は、まず、動作制御系40から運転者による運転操作を取得する(ステップS301)とともにカメラ33による画像の撮影を実行する(ステップS302)。そして、取得した運転操作とカメラ33が撮影した画像とを関連付ける(ステップS303)。
その後、登録・修正処理部11は、入力装置32が運転者からの修正終了指示を受け付けたか否かを判定し(ステップS304)、登録終了指示を受け付けていなければ(ステップS304,No)、ステップS301〜S303の処理を繰り返す。
一方、修正終了の指示を受け付けたならば(ステップS304,Yes)、登録・修正処理部11は、カメラ33による画像の撮影を実行し(ステップS305)、撮影した画像に最も近い画像を運転操作情報13aから検索する(ステップS306)。そして、検索した画像を有する運転操作情報に対し、作成した画像や運転操作を接続して(ステップS307)、処理を終了する。
したがって、例えば図2に示した画像データ(pic001〜pic006)が図3に示した車両位置61〜66に対応し、画像データ「pic002」に対応するデータ(pos002,ste002,acc002,mov002)および画像データ「pic003」に対応するデータ(pos003,ste003,acc003,mov003)を選択的に修正する場合、まず運転者は、車両位置61に到達した後に修正要求を入力し、車両位置64の近傍まで運転した後、修正終了指示を入力する。
登録・修正処理部11は、運転者の操作を取得して新たなデータを作成し、修正終了指示の入力後に撮影した画像から車両位置64以降のデータについては修正が不要であることを認識して車両位置62および車両位置63に対応するデータのみを選択的に修正する。
このように、運転操作情報13aを部分的に修正可能とすることで、登録時に発生した各種状況(歩行者や障害物の存在、対向車両とのすれ違い)に関わらず、汎用的に使用可能な運転操作情報を得ることができる。
上述してきたように、本実施例にかかる運転支援装置1は、カメラ33などによって自車両の状態を特定するとともに動作制御系50から運転者による運転操作を取得し、運転操作情報13aとして記憶する。そして、運転者が運転操作の自動実行を要求した場合には、運転操作情報13aを読み出して運転操作を自動実行するので、使用頻度の高い道路での走行を自動化して運転者にかかる負荷を軽減するとともに、接触事故を防止することができる。
なお、本実施例では、単一の道路について運転操作を登録する場合について説明したが、運転者が求める複数の道路について同様に運転操作を登録し、以降の運転を自動化可能であることはいうまでもない。
以上のように、本発明にかかる運転支援装置は、運転操作の支援に有用であり、特に、使用頻度の高い道路の自動走行に適している。
1 運転支援装置
3 ナビゲーション装置
3a 地図データ
11 登録・修正処理部
12 自動運転処理部
13 記憶部
13a 運転操作情報
31 GPS通信部
32 入力装置
33 カメラ
34 通信装置
35 車速センサ
36 加速度センサ
37 温度センサ
38 音波レーダ
39 ミリ波レーダ
40 表示系
41 ディスプレイ
42 スピーカ
50 動作制御系
51 アクセル
52 ブレーキ
53 ステアリング
54 シフト
61〜66 車両位置
70 道路
71 電柱
72 車庫
3 ナビゲーション装置
3a 地図データ
11 登録・修正処理部
12 自動運転処理部
13 記憶部
13a 運転操作情報
31 GPS通信部
32 入力装置
33 カメラ
34 通信装置
35 車速センサ
36 加速度センサ
37 温度センサ
38 音波レーダ
39 ミリ波レーダ
40 表示系
41 ディスプレイ
42 スピーカ
50 動作制御系
51 アクセル
52 ブレーキ
53 ステアリング
54 シフト
61〜66 車両位置
70 道路
71 電柱
72 車庫
Claims (11)
- 車両の走行にかかる情報を収集し、該収集した情報をもとに車両の運転を支援する運転支援装置であって、
自車両周辺の画像を撮影する撮影手段と、
過去に前記撮影手段が撮影した画像と運転者による運転操作状態とを対応付けた運転操作情報を記憶する記憶手段と、
現在に前記撮影手段が撮影することによって得られた画像に基づき、前記記憶手段から前記運転操作情報を読み出して自車両の運転操作を自動実行する自動運転手段と、
を備えたことを特徴とする運転支援装置。 - 前記自動運転手段は、運転者による運転操作を検出した場合に前記自動実行を中止することを特徴とする請求項1に記載の運転支援装置。
- 前記自動運転手段は、ブレーキ以外の運転操作手段が運転者によって操作された場合に前記自動実行を中止することを特徴とする請求項2に記載の運転支援装置。
- 自車両周辺の障害物を検出する障害物検出手段をさらに備え、前記自動運転手段は、前記障害物検出手段か障害物を検出した場合に前記自動実行を中止することを特徴とする請求項1,2または3に記載の運転支援装置。
- 前記自動運転手段は、前記撮影手段が撮影した画像が、前記運転装置情報として記憶した画像と異なる場合に、前記自動実行を中止することを特徴とする請求項1〜4のいずれか一つに記載の運転支援装置。
- 前記運転操作情報は、運転操作に伴う車両挙動をさらに対応付けて記憶し、前記自動運転手段は、前記自動実行によって生じた車両挙動が前記運転操作情報として記憶した車両挙動と異なる場合に、前記自動実行を中止することを特徴とする請求項1〜5のいずれか一つに記載の運転支援装置。
- 自車両周辺の路面における積雪を検出する積雪検出手段をさらに備え、前記自動運転手段は、前記積雪検出手段が積雪を検出した場合に前記自動実行を中止することを特徴とする請求項1〜6のいずれか一つに記載の運転支援装置。
- 前記積雪検出手段は、音波レーダであることを特徴とする請求項7に記載の運転支援装置。
- 自車両周辺の路面における凍結を検出する凍結検出手段をさらに備え、前記自動運転手段は、前記凍結検出手段が凍結を検出した場合に、前記自動実行を中止することを特徴とする請求項1〜8のいずれか一つに記載の運転支援装置。
- 自車両の位置情報を取得する位置情報取得手段をさらに備え、前記運転操作情報は前記位置情報をさらに関連付けて記憶し、前記自動運転手段は前記運転操作情報として記憶された位置情報をさらに用いて運転操作を自動実行することを特徴とする請求項1〜9のいずれか1つに記載の運転支援装置。
- 前記運転操作情報の修正要求を受け付けた場合に、前記撮影手段が撮影した画像と運転者による運転操作とを対応付けた運転操作情報を再度作成し、修正終了を要求された場合に、当該再作成した運転操作情報によって既存の運転操作情報の対応箇所を置き換える修正処理手段をさらに備えたことを特徴とする請求項1〜10のいずれか一つに記載の運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004118131A JP2005297817A (ja) | 2004-04-13 | 2004-04-13 | 運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004118131A JP2005297817A (ja) | 2004-04-13 | 2004-04-13 | 運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005297817A true JP2005297817A (ja) | 2005-10-27 |
| JP2005297817A5 JP2005297817A5 (ja) | 2007-06-07 |
Family
ID=35329882
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004118131A Withdrawn JP2005297817A (ja) | 2004-04-13 | 2004-04-13 | 運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005297817A (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010000948A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP2010058787A (ja) * | 2009-11-10 | 2010-03-18 | Mitsubishi Electric Corp | 駐車支援装置 |
| CN102496307A (zh) * | 2011-11-17 | 2012-06-13 | 天津大学 | 高速公路防追尾撞车告警装置 |
| WO2012160636A1 (ja) * | 2011-05-23 | 2012-11-29 | トヨタ自動車株式会社 | 車両用情報処理システム |
| JP2015217851A (ja) * | 2014-05-19 | 2015-12-07 | 本田技研工業株式会社 | 走行支援装置 |
| US9336183B2 (en) | 2010-10-15 | 2016-05-10 | Toyota Jidosha Kabushiki Kaisha | Vehicle information processing system and driving assistance system |
| JP2016099953A (ja) * | 2014-11-26 | 2016-05-30 | 株式会社デンソー | 車両自動運転システム |
| JP2016517106A (ja) * | 2013-04-01 | 2016-06-09 | パク,ス−ミン | 自動車の自動運行システム |
| US9457793B2 (en) | 2011-01-12 | 2016-10-04 | Toyota Jidosha Kabushiki Kaisha | Vehicle information processing system |
| KR20190093791A (ko) * | 2018-01-17 | 2019-08-12 | (주)오펠솔루션 | 이벤트에 의한 데이터 레이블링 시스템 및 그 방법 |
| JP2020029231A (ja) * | 2018-08-24 | 2020-02-27 | アイシン精機株式会社 | 走行支援装置 |
| CN113643569A (zh) * | 2014-10-30 | 2021-11-12 | 三菱电机株式会社 | 自动驾驶辅助系统 |
-
2004
- 2004-04-13 JP JP2004118131A patent/JP2005297817A/ja not_active Withdrawn
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010000948A (ja) * | 2008-06-20 | 2010-01-07 | Toyota Motor Corp | 運転支援装置 |
| JP2010058787A (ja) * | 2009-11-10 | 2010-03-18 | Mitsubishi Electric Corp | 駐車支援装置 |
| US9336183B2 (en) | 2010-10-15 | 2016-05-10 | Toyota Jidosha Kabushiki Kaisha | Vehicle information processing system and driving assistance system |
| US9457793B2 (en) | 2011-01-12 | 2016-10-04 | Toyota Jidosha Kabushiki Kaisha | Vehicle information processing system |
| WO2012160636A1 (ja) * | 2011-05-23 | 2012-11-29 | トヨタ自動車株式会社 | 車両用情報処理システム |
| US9360330B2 (en) | 2011-05-23 | 2016-06-07 | Toyota Jidosha Kabushiki Kaisha | Information processing system for vehicle |
| CN102496307A (zh) * | 2011-11-17 | 2012-06-13 | 天津大学 | 高速公路防追尾撞车告警装置 |
| JP2016517106A (ja) * | 2013-04-01 | 2016-06-09 | パク,ス−ミン | 自動車の自動運行システム |
| JP2015217851A (ja) * | 2014-05-19 | 2015-12-07 | 本田技研工業株式会社 | 走行支援装置 |
| CN113643569A (zh) * | 2014-10-30 | 2021-11-12 | 三菱电机株式会社 | 自动驾驶辅助系统 |
| CN113643569B (zh) * | 2014-10-30 | 2024-02-02 | 三菱电机株式会社 | 自动驾驶辅助系统 |
| JP2016099953A (ja) * | 2014-11-26 | 2016-05-30 | 株式会社デンソー | 車両自動運転システム |
| US10005458B2 (en) | 2014-11-26 | 2018-06-26 | Denso Corporation | Automatic driving system for automatically driven vehicle |
| US10625734B2 (en) | 2014-11-26 | 2020-04-21 | Denso Corporation | Automatic driving system for automatically driven vehicle |
| KR20190093791A (ko) * | 2018-01-17 | 2019-08-12 | (주)오펠솔루션 | 이벤트에 의한 데이터 레이블링 시스템 및 그 방법 |
| KR102053713B1 (ko) * | 2018-01-17 | 2019-12-09 | (주)오펠솔루션 | 이벤트에 의한 데이터 레이블링 시스템 및 그 방법 |
| JP2020029231A (ja) * | 2018-08-24 | 2020-02-27 | アイシン精機株式会社 | 走行支援装置 |
| JP7087826B2 (ja) | 2018-08-24 | 2022-06-21 | 株式会社アイシン | 走行支援装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11119479B2 (en) | Vehicle control apparatus | |
| JP4561479B2 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP4661917B2 (ja) | 駐車支援装置および駐車支援方法 | |
| US8990016B2 (en) | Navigation apparatus, method, and program | |
| JP6926976B2 (ja) | 駐車支援装置及びコンピュータプログラム | |
| JP2009154654A (ja) | 車両用駐車支援装置および映像表示方法 | |
| JPWO2019008764A1 (ja) | 駐車支援方法及び駐車支援装置 | |
| JP2014157395A (ja) | 車両用運転支援システム及び運転支援方法 | |
| JP2010186257A (ja) | 駐車支援システム、車載駐車支援装置、情報付マーカー | |
| JP2005297817A (ja) | 運転支援装置 | |
| JP5400316B2 (ja) | 駐車支援装置 | |
| JP7218172B2 (ja) | 車載処理装置、及び車載処理装置の制御方法 | |
| JP2018122738A (ja) | 制御装置および制御方法 | |
| JP2012215564A (ja) | 運転支援装置および運転支援方法 | |
| JP4888285B2 (ja) | 運転支援装置、運転支援方法及びコンピュータプログラム | |
| JP2011235677A (ja) | 駐車支援システム、ナビゲーション装置 | |
| JP2012008020A (ja) | 車載装置 | |
| JP2018127065A (ja) | 駐車支援装置 | |
| JP5076819B2 (ja) | 車両運転支援装置および車両運転支援方法 | |
| JP4703544B2 (ja) | 運転支援装置 | |
| JP2008090654A (ja) | 運転操作支援装置 | |
| US11472401B2 (en) | Parking assistance device | |
| JP4023478B2 (ja) | 駐車支援システム | |
| JP2008185554A (ja) | 車両用経路案内装置 | |
| JP5041165B2 (ja) | 案内制御装置、案内制御方法、及び案内制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070413 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070413 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090122 |