JP2005297091A - ゴムベール移送設備及び移送方法 - Google Patents
ゴムベール移送設備及び移送方法 Download PDFInfo
- Publication number
- JP2005297091A JP2005297091A JP2004113242A JP2004113242A JP2005297091A JP 2005297091 A JP2005297091 A JP 2005297091A JP 2004113242 A JP2004113242 A JP 2004113242A JP 2004113242 A JP2004113242 A JP 2004113242A JP 2005297091 A JP2005297091 A JP 2005297091A
- Authority
- JP
- Japan
- Prior art keywords
- rubber
- jig
- place
- rubber bale
- bale
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Manipulator (AREA)
Abstract
【課題】 充分な保持力を有すると共に、ゴムベールの積み重ね位置精度も要求されないようなゴムベール移送設備を提供すること。
【解決手段】第1の場所P1に置かれているゴムベールGを第2の場所P2へと移送するためのゴムベール移送設備であって、ゴムベールGを保持する2本のドリル7と、このドリル7をゴムベールG内にねじ込むための第1駆動機構と、この第1駆動機構を保持する治具保持部9と、この治具保持部9を第1の場所P1から第2の場所P2へと移送させる移送機構とを備え、第1の場所P1において、ドリル7を第1の方向に回転駆動することでゴムベールGの保持を行い、第2の場所P2において、ドリル7を第2の方向に回転駆動することでゴムベールGの保持を解除する。
【選択図】図3
【解決手段】第1の場所P1に置かれているゴムベールGを第2の場所P2へと移送するためのゴムベール移送設備であって、ゴムベールGを保持する2本のドリル7と、このドリル7をゴムベールG内にねじ込むための第1駆動機構と、この第1駆動機構を保持する治具保持部9と、この治具保持部9を第1の場所P1から第2の場所P2へと移送させる移送機構とを備え、第1の場所P1において、ドリル7を第1の方向に回転駆動することでゴムベールGの保持を行い、第2の場所P2において、ドリル7を第2の方向に回転駆動することでゴムベールGの保持を解除する。
【選択図】図3
Description
本発明は、第1の場所に置かれているゴムベールを第2の場所へと移送するためのゴムベール移送設備及び移送方法に関するものである。
ゴムベールとは、直方体に成型された塊状のゴムであり、その処理工程において第1の場所から第2の場所へと移送される。ゴムベールは、そのいくつかがパレット上に積まれており、その積み重ねられたゴムベールを1つずつ取り出して第2の場所へと場所を移動させる。第2の場所に移動されたゴムベールは、その後の工程において粉砕処理され、最終的には電気部品や自動車部品等の製造に使用される。
ここで、ゴムベールを移動させる手段としていくつかの手段が知られている。1つ目はエアーバキューム方式である。このエアーバキューム方式は、吸着パッドを用いて人手により移送させる方法である。しかし、ゴムベールは1つの重さが30kgもあるため、人手で移送させるのはかなりの労力を有する。また、ゴムベールの表面形状が湾曲していたり、ゴムベールのラッピングが破れていたりすると、吸着パッドでうまく吸着できないという問題が生じる。
2つ目としてクランプ(チャック方式)がある。例えば、下記特許文献1に開示される天然ゴム塊の把持整列装置では、開閉アームの先端内側の相対抗する位置に天然ゴム塊を着脱可能に把持する係止爪を設けており、この係止爪により天然ゴム塊を把持して移送する。かかる把持機構の場合、パレットの上に積み重ねるゴムベールの位置決め精度が要求されるという問題があり、人手で行っているゴムベールの積み重ね作業に神経を使わなければならない。また、下記特許文献2では、ゴムベールを四方からクランプするクランプ板を備えたクランプハンドを開示する。やはりこの場合もゴムベールの位置決め精度が要求される。
その他の手法として、爪や針状の治具をゴムベールに突き刺して移送する手法も考えられるが、把持強度の面で問題があり、移送途中で脱落してしまう可能性がある。従って、確実性、信頼性に欠ける手法である。
特開平8−53299号公報
特開平8−85504号公報
本発明は上記実情に鑑みてなされたものであり、その課題は、充分な保持力を有すると共に、ゴムベールの積み重ね位置精度も要求されないようなゴムベール移送設備及び移送方法を提供することである。
上記課題を解決するため本発明に係るゴムベール移送設備は、
第1の場所に置かれているゴムベールを第2の場所へと移送するためのゴムベール移送設備であって、
ゴムベールを保持する螺旋状治具と、
この螺旋状治具をゴムベール内にねじ込むための第1駆動機構と、
この第1駆動機構を保持する治具保持部と、
この治具保持部を第1の場所から第2の場所へと移送させる移送機構とを備え、
第1の場所において、螺旋状治具を第1の方向に回転駆動することでゴムベールの保持を行い、第2の場所において、螺旋状治具を第2の方向に回転駆動することでゴムベールの保持を解除するように構成したことを特徴とするものである。
第1の場所に置かれているゴムベールを第2の場所へと移送するためのゴムベール移送設備であって、
ゴムベールを保持する螺旋状治具と、
この螺旋状治具をゴムベール内にねじ込むための第1駆動機構と、
この第1駆動機構を保持する治具保持部と、
この治具保持部を第1の場所から第2の場所へと移送させる移送機構とを備え、
第1の場所において、螺旋状治具を第1の方向に回転駆動することでゴムベールの保持を行い、第2の場所において、螺旋状治具を第2の方向に回転駆動することでゴムベールの保持を解除するように構成したことを特徴とするものである。
かかるゴムベール移送設備による作用・効果は、次の通りである。ゴムベールを保持する保持手段として、螺旋状治具を使用する。この螺旋状治具をゴムベール内にねじ込むことでゴムベールを保持することができる。螺旋状治具の螺旋部分により確実にゴムベールを保持することができ、容易に脱落することがない。また、保持するときは、螺旋状治具を第1の方向に回転すれば、ゴムベール内部にねじ込まれていく。螺旋状治具をはずす時は、第1の方向とは逆の第2の方向に回転すれば、保持状態を解除することができる。さらに、螺旋状治具をねじ込む場合は、ゴムベールの表面であれば特に厳しい位置精度が要求されることはない。その結果、充分な保持力を有すると共に、ゴムベールの積み重ね位置精度も要求されないようなゴムベール移送設備を提供することができる。
本発明に係る螺旋状治具は、少なくとも2本設けられており、直方体形状を有するゴムベールの長辺方向に沿って配置されるように、前記治具保持部を所定の軸芯周りに旋回させるための第2駆動機構が設けられていることが好ましい。
この構成によると、少なくとも2本の螺旋状治具が設けられており、この2本がゴムベールの長辺方向に配置された状態で、ゴムベールを保持することができる。保持しようとするゴムベールの長辺方向に沿って2本の螺旋状治具が配置されていない状態の時には、治具保持部を旋回させることで、長辺方向に螺旋状治具の配置を沿わせることができる。これにより、安定した状態でゴムベールを保持することができる。
本発明に係る螺旋状治具はドリルであることが好ましい。ドリルを用いることで、ゴムベールへのねじ込みを容易に行うことができる。
本発明に係る螺旋状治具の表面には、耐摩耗性を有する表面処理が施されていることが好ましい。かかる表面処理を施すことで、長期間にわたってドリルを使用することができる。
本発明に係る前記移送機構は、
治具保持部を上下方向に駆動する第3駆動機構と、
治具保持部を水平第1方向に駆動する第4駆動機構と、
治具保持部を水平第1方向と直交する水平第2方向に駆動する第5駆動機構とを備えていることが好ましい。
治具保持部を上下方向に駆動する第3駆動機構と、
治具保持部を水平第1方向に駆動する第4駆動機構と、
治具保持部を水平第1方向と直交する水平第2方向に駆動する第5駆動機構とを備えていることが好ましい。
この構成によると、治具保持部、すなわち、 螺旋状治具を3次元空間内で任意に移動させることができる。
本発明において、ゴムベールは所定個数がパレットに搭載されており、第1の場所においてすべてのゴムベールが取り出された空のパレットをパレット回収位置に移送するためのパレット移送機構が設けられていることが好ましい。
かかるパレット移送機構を設けることでパレットを確実に回収でき、次のパレットに搭載されているゴムベールの移送を引き続き行うことができる。
上記課題を解決するため本発明に係るゴムベール移送方法は、
第1の場所に置かれているゴムベールを第2の場所へと移送するためのゴムベール移送方法であって、
第1の場所において、螺旋状治具を第1の方向に回転してゴムベール内にねじ込む工程と、
この治具保持部により保持されたゴムベールを第1の場所から第2の場所へと移送させる工程と、
第2の場所において、螺旋状治具を第1の方向とは逆の第2の方向に回転駆動することでゴムベールの保持を解除する工程とを有することを特徴とするものである。
第1の場所に置かれているゴムベールを第2の場所へと移送するためのゴムベール移送方法であって、
第1の場所において、螺旋状治具を第1の方向に回転してゴムベール内にねじ込む工程と、
この治具保持部により保持されたゴムベールを第1の場所から第2の場所へと移送させる工程と、
第2の場所において、螺旋状治具を第1の方向とは逆の第2の方向に回転駆動することでゴムベールの保持を解除する工程とを有することを特徴とするものである。
かかる構成による作用・効果は、既に述べた通りである。
本発明に係るゴムベール移送設備の好適な実施形態を図面を用いて説明する。図1は、ゴムベール移送設備の構成を示す正面図、図2は、ゴムベール移送設備の構成を示す平面図、図3は、ゴムベール移送設備の構成を示す要部正面図、図4は、同じく要部側面図である。
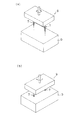
移送対象となるゴムベールGは、直方体形状を有しており、図5のような形態(以下、「石垣積み」と称する)で積まれている。ゴムベールGは前工程において直方体の形状に成型されたものが、運び込まれており、石垣積みされている。1段あたり6個のゴムベールGが図5に図示するような配置規則に基づいて、6段積みされている。なお、ゴムベールGの配置は、図5(a)(b)の2通りがある。図5(c)のS2,S4,S6は(a)の配置であり、S1,S3,S5は(b)の配置となっており、交互に異なる配置を繰り返している。なお、この6個×6段のゴムベールGを1組として1つのパレット1の上に搭載されている。
なお、ゴムベールGの積み重ね方法としては、図8に示すような方法もある。図8に示す積み重ね方法のほうが図5よりもシンプルであるが、一番上のゴムベールGを引き上げようとする時、そのすぐ下にあるゴムベールGもいっしょにひきづられて上がろうとする傾向がある。これは上下のゴムベールGの裏面と表面がぴったりと密着しているためである。図5のような石垣積みの場合は、上下のゴムベールGが密着している表面積が小さくなるので、確実に1番上のゴムベールGのみを引き上げることができる。
図2に示すようにゴムベールGを搭載したパレット1は、図2の矢印A方向に移送される。図2では、5パレット分のゴムベールが図示されており、ローラコンベア2により移送される。図2において、パレット1の移送方向の最も下流側が第1の場所に相当し、第1の場所P1の右方向に第2の場所P2が設定されている。第2の場所P2に降ろされたゴムベールGは、プッシャー(押出機構)3により第3の場所P3の方向に押出される。このゴムベールGは、粉砕処理等の後工程へと更に移送されることになる。
第1の場所P1にあるパレット1上のゴムベールGは、ゴムベール移送機構により1つずつ保持されて第2の場所P2へと移送されていき、すべてのゴムベールGが移送されると、空のパレット1は、パレット移送機構4(図1参照)により回収される。パレット移送機構4は、吸着パッドによりパレット1を吸着して移送することができる。空のパレット1は、リフター5の上(パレット回収位置に相当)に積み重ねられる。
次にゴムベール移送機構6について、図3、図4により説明する。ゴムベールGを保持するための治具として、2本のドリル7(螺旋状治具に相当)が使用される。ドリル7を回転させてゴムベールG内にねじ込んでいくことにより、ゴムベールGを保持することができる。2本のドリル7は、ねじ込み用のギヤードモータ8(第1駆動機構に相当)により回転駆動される。ギヤードモータ8とドリル7とは、ベルトにより連結される。ギヤードモータ8とドリル7は、治具保持部9に取り付けられ、保持されている。
治具保持部9は、旋回用ギヤードモータ10により方向を90゜変換できるようにしている。図5の石垣積みで説明したように、ゴムベールGの配置方向は長手方向がY方向(水平第2方向・・・図2参照)に沿う方向と、長手方向がX方向(水平第1方向)の2通りが存在する。そこで、2本のドリル7でゴムベールGを保持する場合は、2本のドリル7が長手方向に配列した状態で保持できるように旋回可能な機構(第2駆動機構に相当)が設けられている。ギヤードモータ10に連結されたギヤ11により、治具保持部9が回転軸9a回りに旋回駆動される。旋回前と旋回後の状態が図6に示される。旋回用のギヤードモータ10は、更に別の保持部12により取り付け保持されている。
保持部12を上下方向(Z方向)に駆動できるように昇降用サーボモータ14が設けられている。サーボモータ14と、ラック&ピニオン機構15により、保持部12、すなわち、2本のドリル7に把持されたゴムベールGが上下方向に駆動される。サーボモータ14は、フレーム13の上下部分13aに取り付けられている。サーボモータ14とラック&ピニオン15は、第3駆動機構に相当する。
フレーム13の水平部分13bは、別の水平本体部16に沿って(Y方向に相当)移動できるように構成される。水平部分13bには、Y軸走行用サーボモータ17が取り付けられており、ラック&ピニオン18によりフレーム13をY軸方向に移動させる。ラック&ピニオンのうち、ピニオンはサーボモータ17に連結され、ラックが水平本体部16に取り付けられる。サーボモータ17とラック&ピニオン18は、第4駆動機構に相当する。
水平本体部16をX軸方向に沿って移動させるためのX軸走行用サーボモータ19(第5駆動機構に相当)が設けられており、敷地内に設置された固定フレーム21に対して水平本体部16を移動させる。サーボモータ19の駆動力は、駆動伝達部20により伝達される。以上のような移送機構を設けることにより、パレット1の上にあるゴムベールGを保持して、第2の場所まで移送させることができる。図5に示すように、ゴムベールGは常に同じ場所に位置しているわけではないので、夫々の位置に対してドリル7を移動させる必要がある。本発明のように、水平面内のX,Y方向に移動させる機構を備えているので、どの位置にあるゴムベールGも確実に保持することができる。
<制御ブロック図>
次に、ゴムベール移送設備の制御ブロック図を図7により説明する。制御装置30は、設備の各部の制御を行う中核部である。制御プログラム31に基づいて、各部の動作制御を行う。例えば、石垣積みされたゴムベールGを取り出していく順序は、予めプログラムされている。旋回用ギヤードモータ10は、旋回駆動部32(駆動回路)により駆動される。ねじ込み用ギヤードモータ8は、ドリル駆動部33により駆動される。昇降用サーボモータ14、X軸走行用サーボモータ19、Y軸走行用サーボモータ17は、XYZ駆動部34により駆動される。また、各駆動部に指令を与えるために必要に応じて各種センサー35が設けられる。例えば、ドリル7の先端がゴムベールGの表面に接触したことを検出するセンサー等が設けられる。また、ドリル7が現在どの位置(X,Y,Z座標)にあるのかを検出するセンサーを設けておくことが好ましい。
次に、ゴムベール移送設備の制御ブロック図を図7により説明する。制御装置30は、設備の各部の制御を行う中核部である。制御プログラム31に基づいて、各部の動作制御を行う。例えば、石垣積みされたゴムベールGを取り出していく順序は、予めプログラムされている。旋回用ギヤードモータ10は、旋回駆動部32(駆動回路)により駆動される。ねじ込み用ギヤードモータ8は、ドリル駆動部33により駆動される。昇降用サーボモータ14、X軸走行用サーボモータ19、Y軸走行用サーボモータ17は、XYZ駆動部34により駆動される。また、各駆動部に指令を与えるために必要に応じて各種センサー35が設けられる。例えば、ドリル7の先端がゴムベールGの表面に接触したことを検出するセンサー等が設けられる。また、ドリル7が現在どの位置(X,Y,Z座標)にあるのかを検出するセンサーを設けておくことが好ましい。
<ゴムベールの取り出し動作>
次に、ゴムベールGを第1の場所から第2の場所へ移送する場合の動作を説明する。図2に示すように、ゴムベールGを搭載したペレット1が順番に移送されてくる。ペレット1に搭載されているゴムベールGの一番上の段の配置は、図5(a)に示すとおりであり、図示された順番にゴムベールGを取り出していく。まず1番目のゴムベールGを保持すべく、保持対象のゴムベールGの位置にドリル7が位置するように、X,Y座標の位置調整を行う。また、ゴムベールGの方向に応じて、旋回用ギヤードモータ10を駆動させる。ドリル7の位置設定が終了すると、ドリル7を回転させながら降下させていく。ドリル7の先端がゴムベールGの表面に接触してから、所定長さだけドリル7がねじ込まれる。
次に、ゴムベールGを第1の場所から第2の場所へ移送する場合の動作を説明する。図2に示すように、ゴムベールGを搭載したペレット1が順番に移送されてくる。ペレット1に搭載されているゴムベールGの一番上の段の配置は、図5(a)に示すとおりであり、図示された順番にゴムベールGを取り出していく。まず1番目のゴムベールGを保持すべく、保持対象のゴムベールGの位置にドリル7が位置するように、X,Y座標の位置調整を行う。また、ゴムベールGの方向に応じて、旋回用ギヤードモータ10を駆動させる。ドリル7の位置設定が終了すると、ドリル7を回転させながら降下させていく。ドリル7の先端がゴムベールGの表面に接触してから、所定長さだけドリル7がねじ込まれる。
所定長さのドリル7のねじ込みが行われた後、ドリル7の回転駆動は停止する。その後、昇降用サーボモータ14を駆動させて、ゴムベールGを上昇させ、第1の場所P1から第2の場所P2へと移送する。この時の移動は、X・Y走行用サーボモータ17,19により行われる。第2の場所P2に移送された後、昇降用サーボモータ17によりゴムベールGを所定高さまで降下させ、ドリル7をねじ込む時とは逆回転させる。これにより、保持状態が解除され、ゴムベールGは第2の場所P2に設置される。
第2の場所P2に置かれたゴムベールGは、プッシャー3により第3の場所へと押し込まれる。この第3の場所において、粉砕処理が行われる。一方、ゴムベールGの保持を解除した後、ドリル7は第2の場所P2から第1の場所P1へと戻り、次のゴムベールGの保持を行う。以下、パレット1の上のゴムベールGがすべて第2の場所P2へ移送されるまで繰り返す。パレット1上のゴムベールGをすべて移送すると、空になったパレット1はパレット移送機構4により図1に示すようなリフター5の上に置かれる。空のパレット1が移送された後、次のパレット1を第1の場所P1に位置させるべく、ローラコンベア2を駆動する。以下、同じような動作を繰り返す。
<実施例>
次に、実際に保持テストを行った。ゴムベールGの素材としてEPDMゴムを使用した。ねじ込み長さを50mmと100mmの2種類でテストした。螺旋状治具としてのドリルとしては、図示するように標準規格品、ねじ山を高くしたもの、ねじ山を低くしたものの3通りを使用した。ドリルの材質は、鉄製のものを使用した。ゴムベール1つの重さは28kgであり、この上に更に別のウェイト(5kg、10kg)を載せた状態のものと、ウェイトを載せない状態のものとでテストした。
次に、実際に保持テストを行った。ゴムベールGの素材としてEPDMゴムを使用した。ねじ込み長さを50mmと100mmの2種類でテストした。螺旋状治具としてのドリルとしては、図示するように標準規格品、ねじ山を高くしたもの、ねじ山を低くしたものの3通りを使用した。ドリルの材質は、鉄製のものを使用した。ゴムベール1つの重さは28kgであり、この上に更に別のウェイト(5kg、10kg)を載せた状態のものと、ウェイトを載せない状態のものとでテストした。
ねじ込み長さ50mmの場合のテスト結果は図9に、100mmの場合のテスト結果は図10に示される。これらの図から分かるように、ねじ込み長さ50mmの場合は、同じ外径とすれば、ねじ山の高いものほど保持時間が長くなる。ねじ込み長さが100mmとなると、標準品とねじ山を高くしたドリルとでは、大きな差は見られなかった。ドリルによりゴムベールGを第1の場所から第2の場所へと移送する時間は、数十秒程度であるから十分に実用に耐えうるレベルである。
テストでは鉄製のドリルを使用したが、ねじ込み動作を繰り返しても、金属紛のゴムベールへの混入は確認されなかった。ただし、より安全性を高めるために、鋼製のドリルを使用したり、硬質Crメッキ(耐摩耗性を有する表面処理の一例)を施すことが好ましい。また、ねじ込み動作を10回繰り返したが、治具温度の上昇についてもほとんど見られなかった。実稼動状態では、5分に1度程度のねじ込み動作であるため、温度上昇の問題もほとんどない。
<別実施形態>
本実施形態で開示する機構は一例を示すものであり、これに限定されるものではない。例えば、螺旋状治具としては、ドリル以外のネジ形状を有するものを使用してもよい。また、螺旋状治具としてコイルバネ状の形状をした治具を使用してもよい。螺旋状治具の個数は2個ではなく、3個以上としてもよい。
本実施形態で開示する機構は一例を示すものであり、これに限定されるものではない。例えば、螺旋状治具としては、ドリル以外のネジ形状を有するものを使用してもよい。また、螺旋状治具としてコイルバネ状の形状をした治具を使用してもよい。螺旋状治具の個数は2個ではなく、3個以上としてもよい。
2本ドリル(螺旋状治具)の回転方向であるが、次のような構成が考えられる。1つ目は、保持動作のときは2本とも右回転(第1の方向)、保持解除のときは2本とも左回転(第2の方向)とすることである。2つ目は、保持動作のときは2本とも左回転(第1の方向)、保持解除のときは2本とも右回転(第2の方向)とすることである。当然1つ目と2つ目の例では形成されるネジの方向は逆になる。3つ目は、保持動作のとき1本は右回転、1本は左回転とし(これらが第1の方向となる)、保持解除のときは1本は左回転、1本は右回転(これらが第2の方向となる)としてもよい。3本以上の時も同様に考えることができる。
XYZ方向に移送する機構をパレット側に設けてもよい。すなわち、 パレットがXYZ方向に移動できるような機構を採用してもよい。
石垣積みの形態については図5のものに限定されるものではない。例えば、1段あたりの個数や何段にするかは、適宜変更可能である。また、図5ではゴムベールの配置パターンは2通りであるが、3通り以上としてもよい。
1 パレット
2 ローラコンベア
3 プッシャー
4 パレット移送機構
5 リフター
6 ゴムベール移送機構
7 ドリル
8 ねじ込み用ギヤードモータ
9 治具保持部
10 旋回用ギヤードモータ
14 昇降用サーボモータ
15 ラック&ピニオン機構
17 Y軸走行用サーボモータ
18 ラック&ピニオン
19 X軸走行用サーボモータ
20 駆動伝達部
G ゴムベール
P1 第1の場所
P2 第2の場所
P3 第3の場所
2 ローラコンベア
3 プッシャー
4 パレット移送機構
5 リフター
6 ゴムベール移送機構
7 ドリル
8 ねじ込み用ギヤードモータ
9 治具保持部
10 旋回用ギヤードモータ
14 昇降用サーボモータ
15 ラック&ピニオン機構
17 Y軸走行用サーボモータ
18 ラック&ピニオン
19 X軸走行用サーボモータ
20 駆動伝達部
G ゴムベール
P1 第1の場所
P2 第2の場所
P3 第3の場所
Claims (7)
- 第1の場所に置かれているゴムベールを第2の場所へと移送するためのゴムベール移送設備であって、
ゴムベールを保持する螺旋状治具と、
この螺旋状治具をゴムベール内にねじ込むための第1駆動機構と、
この第1駆動機構を保持する治具保持部と、
この治具保持部を第1の場所から第2の場所へと移送させる移送機構とを備え、
第1の場所において、螺旋状治具を第1の方向に回転駆動することでゴムベールの保持を行い、第2の場所において、螺旋状治具を第2の方向に回転駆動することでゴムベールの保持を解除するように構成したことを特徴とするゴムベール移送設備。 - 螺旋状治具は、少なくとも2本設けられており、直方体形状を有するゴムベールの長辺方向に沿って配置されるように、前記治具保持部を所定の軸芯周りに旋回させるための第2駆動機構が設けられていることを特徴とする請求項1に記載のゴムベール移送設備。
- 螺旋状治具はドリルであることを特徴とする請求項1又は2に記載のゴムベール移送設備。
- 螺旋状治具の表面には、耐摩耗性を有する表面処理が施されていることを特徴とする請求項1〜3のいずれか1項に記載のゴムベール移送設備。
- 前記移送機構は、
治具保持部を上下方向に駆動する第3駆動機構と、
治具保持部を水平第1方向に駆動する第4駆動機構と、
治具保持部を水平第1方向と直交する水平第2方向に駆動する第5駆動機構とを備えていることを特徴とする請求項1〜4のいずれか1項に記載のゴムベール移送設備。 - ゴムベールは所定個数がパレットに搭載されており、第1の場所においてすべてのゴムベールが取り出された空のパレットをパレット回収位置に移送するためのパレット移送機構が設けられていることを特徴とする請求項1〜5のいずれか1項に記載のゴムベール移送設備。
- 第1の場所に置かれているゴムベールを第2の場所へと移送するためのゴムベール移送方法であって、
第1の場所において、螺旋状治具を第1の方向に回転してゴムベール内にねじ込む工程と、
この治具保持部により保持されたゴムベールを第1の場所から第2の場所へと移送させる工程と、
第2の場所において、螺旋状治具を第1の方向とは逆の第2の方向に回転駆動することでゴムベールの保持を解除する工程とを有することを特徴とするゴムベール移送方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004113242A JP2005297091A (ja) | 2004-04-07 | 2004-04-07 | ゴムベール移送設備及び移送方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004113242A JP2005297091A (ja) | 2004-04-07 | 2004-04-07 | ゴムベール移送設備及び移送方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005297091A true JP2005297091A (ja) | 2005-10-27 |
Family
ID=35329261
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004113242A Pending JP2005297091A (ja) | 2004-04-07 | 2004-04-07 | ゴムベール移送設備及び移送方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005297091A (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103084765A (zh) * | 2013-02-04 | 2013-05-08 | 张家港市永发机器人科技有限公司 | 应用于直角坐标系焊接机器人的悬臂式滑轨机构 |
| JP2013123788A (ja) * | 2011-12-16 | 2013-06-24 | Honda Motor Co Ltd | ワーク作業システム |
| EP2927175A1 (en) * | 2014-04-01 | 2015-10-07 | Suzuka Engineering Co., Ltd | Method for lifting and conveying bale rubber and device for the same |
| JP2018051656A (ja) * | 2016-09-27 | 2018-04-05 | 日産自動車株式会社 | 搬送装置および搬送方法 |
| CN109202874A (zh) * | 2017-07-05 | 2019-01-15 | 海南大学 | 一种橡胶干燥生产线卸胶机械手 |
| WO2019193272A1 (fr) | 2018-04-06 | 2019-10-10 | Compagnie Generale Des Etablissements Michelin | Dispositif et procédé de préhension de bloc élastomérique souple |
| WO2022101571A1 (fr) | 2020-11-16 | 2022-05-19 | Compagnie Generale Des Etablissements Michelin | Dispositif et procédé de transfert de blocs élastomériques |
| CN114929438A (zh) * | 2019-11-13 | 2022-08-19 | 开放思维风险投资个人有限公司 | 用于拾取元件的系统 |
| EP4046760A1 (en) | 2021-02-23 | 2022-08-24 | Compagnie Generale Des Etablissements Michelin | Robot equipped with a gripper for performing a picking process |
| US12304737B2 (en) | 2021-05-06 | 2025-05-20 | Compagnie Generale Des Etablissements Michelin | Automated flow control for rubber product manufacturing processes |
| US12378086B2 (en) | 2021-02-23 | 2025-08-05 | Compagnie Generale Des Etablissements Michelin | Automated cell for performing container control during a process of picking rubber blocks |
-
2004
- 2004-04-07 JP JP2004113242A patent/JP2005297091A/ja active Pending
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013123788A (ja) * | 2011-12-16 | 2013-06-24 | Honda Motor Co Ltd | ワーク作業システム |
| CN103084765A (zh) * | 2013-02-04 | 2013-05-08 | 张家港市永发机器人科技有限公司 | 应用于直角坐标系焊接机器人的悬臂式滑轨机构 |
| EP2927175A1 (en) * | 2014-04-01 | 2015-10-07 | Suzuka Engineering Co., Ltd | Method for lifting and conveying bale rubber and device for the same |
| JP2015196580A (ja) * | 2014-04-01 | 2015-11-09 | 鈴鹿エンヂニヤリング株式会社 | ベールゴムの吊り揚げ搬送方法及びその装置 |
| US9394145B2 (en) | 2014-04-01 | 2016-07-19 | Suzuka Engineering Co., Ltd. | Method for lifting and conveying bale rubber and device for the same with grip safety mechanism |
| JP2018051656A (ja) * | 2016-09-27 | 2018-04-05 | 日産自動車株式会社 | 搬送装置および搬送方法 |
| CN109202874A (zh) * | 2017-07-05 | 2019-01-15 | 海南大学 | 一种橡胶干燥生产线卸胶机械手 |
| FR3079767A1 (fr) * | 2018-04-06 | 2019-10-11 | Compagnie Generale Des Etablissements Michelin | Dispositif et procede de prehension de bloc elastomerique souple |
| WO2019193272A1 (fr) | 2018-04-06 | 2019-10-10 | Compagnie Generale Des Etablissements Michelin | Dispositif et procédé de préhension de bloc élastomérique souple |
| CN114929438A (zh) * | 2019-11-13 | 2022-08-19 | 开放思维风险投资个人有限公司 | 用于拾取元件的系统 |
| JP2023501548A (ja) * | 2019-11-13 | 2023-01-18 | オープン マインド ベンチャーズ エス.エル.ユー. | 要素をピックアップするシステム |
| JP7690956B2 (ja) | 2019-11-13 | 2025-06-11 | オープン マインド ベンチャーズ エス.エル.ユー. | 要素をピックアップするシステム |
| WO2022101571A1 (fr) | 2020-11-16 | 2022-05-19 | Compagnie Generale Des Etablissements Michelin | Dispositif et procédé de transfert de blocs élastomériques |
| FR3116223A1 (fr) | 2020-11-16 | 2022-05-20 | Compagnie Generale Des Etablissements Michelin | Dispositif et procédé de transfert de blocs élastomériques |
| US12214976B2 (en) | 2020-11-16 | 2025-02-04 | Compagnie Generale Des Etablissements Michelin | Device and method for transferring elastomer blocks |
| EP4046760A1 (en) | 2021-02-23 | 2022-08-24 | Compagnie Generale Des Etablissements Michelin | Robot equipped with a gripper for performing a picking process |
| US11820609B2 (en) | 2021-02-23 | 2023-11-21 | Compagnie Generale Des Etablissements Michelin | Robot equipped with a gripper for performing a picking process |
| US12378086B2 (en) | 2021-02-23 | 2025-08-05 | Compagnie Generale Des Etablissements Michelin | Automated cell for performing container control during a process of picking rubber blocks |
| US12304737B2 (en) | 2021-05-06 | 2025-05-20 | Compagnie Generale Des Etablissements Michelin | Automated flow control for rubber product manufacturing processes |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105345281B (zh) | 镭焊机 | |
| EP2358617B2 (en) | Stacking apparatus and method of multi-layer stacking of objects on a support | |
| KR101488540B1 (ko) | 물품 처리 장치, 시스템 및 방법 | |
| JP2005297091A (ja) | ゴムベール移送設備及び移送方法 | |
| KR20210044846A (ko) | 로봇 및 이를 구비하는 로봇 시스템 | |
| CN102152298A (zh) | 机器人系统及工件取出方法 | |
| DE102019115571B4 (de) | Schnelles Abtransportieren von geschnittenen Teilen aus einer Verarbeitungsanlage | |
| CN111993403A (zh) | 一种具有取料和堆叠功能的机械手的控制方法 | |
| CN104624831B (zh) | 一种冷挤压自动生产线 | |
| CN101312805A (zh) | 机床 | |
| CN105537626B (zh) | 一种拉伸试棒自动化生产系统及方法 | |
| KR101829938B1 (ko) | 창호프레임 통합 핸들 조립을 위한 자동 천공장치 | |
| EP1893512B1 (en) | Automatic depalletizer | |
| JP5429117B2 (ja) | ハンド及びロボット | |
| CN115959352B (zh) | 一种拆袋机器人及工作方法 | |
| DE102009011301B4 (de) | Verfahren und Greifer zur Handhabung eines Gebindes mittels eines Manipulators | |
| CN106863501A (zh) | 一种木托盘打钉机器人 | |
| CN107378437A (zh) | 一种圆柱体工件装配装置 | |
| JP2603055B2 (ja) | 山形鋼自動搬入移送設備 | |
| JP2004345755A (ja) | パレタイザー | |
| JP5970283B2 (ja) | 板材加工装置への板材供給方法及びその装置 | |
| WO2007097441A1 (ja) | 作業装置及びロボットによる作業方法 | |
| JP5617512B2 (ja) | ハンド及びロボット | |
| JP5604259B2 (ja) | 曲がりパイプ製造装置 | |
| CN206417604U (zh) | 机器人上下料装置及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080828 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090107 |