JP2005292047A - X線断層撮像装置及びx線断層撮像方法 - Google Patents
X線断層撮像装置及びx線断層撮像方法 Download PDFInfo
- Publication number
- JP2005292047A JP2005292047A JP2004110306A JP2004110306A JP2005292047A JP 2005292047 A JP2005292047 A JP 2005292047A JP 2004110306 A JP2004110306 A JP 2004110306A JP 2004110306 A JP2004110306 A JP 2004110306A JP 2005292047 A JP2005292047 A JP 2005292047A
- Authority
- JP
- Japan
- Prior art keywords
- detector
- inspected
- ray
- projection image
- tomographic imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Analysing Materials By The Use Of Radiation (AREA)
Abstract
【課題】 被検査体の全体投影像とともに特定部位のみ高解像度の部分投影像を比較的短時間で取得し、また2つの検出器から得られた投影画像の合成処理を容易にし、さらに非金属(軽金属含む)及び重金属の被検査体いずれにも対応できるようにする。
【解決手段】 1台のX線撮像装置に特性の異なる2種の検出器20,40を搭載し、それぞれの特徴を生かし、交代的に投影データを取得して、被検査体10特定部位の再構成画像の解像度を向上させ、また、軽元素のみからなる被検査体10は2種の検出器20,40のうち軟線でも透過し得る入射窓を持つ検出器40のみを用い、例えば直径が10mm以上の重金属が混在する被検査体10の場合は検出面積が広いが画素の粗い検出器20の方を選択することが可能な駆動機構を有する。
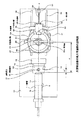
【選択図】 図1
【解決手段】 1台のX線撮像装置に特性の異なる2種の検出器20,40を搭載し、それぞれの特徴を生かし、交代的に投影データを取得して、被検査体10特定部位の再構成画像の解像度を向上させ、また、軽元素のみからなる被検査体10は2種の検出器20,40のうち軟線でも透過し得る入射窓を持つ検出器40のみを用い、例えば直径が10mm以上の重金属が混在する被検査体10の場合は検出面積が広いが画素の粗い検出器20の方を選択することが可能な駆動機構を有する。
【選択図】 図1
Description
本発明は、X線を用いて被検査体の内部構造を検査するX線断層撮像装置及びX線断層撮像方法に関する。
従来より、産業分野において微小被検査体内部に存在するひび割れや断線等を検査するため非破壊三次元分析が要求されている。その検査手法のひとつとして、X線を使用したコンピュータ断層撮像装置(以下、X線断層撮像装置と称する。)を用いる方法がある。
X線断層撮像装置は、例えば、X線源と、このX線源よりX線焦点を経て被検査体にコーンビーム状に照射されて透過したX線を検出する例えばフラットパネルディテクタ(以下、FPDという。)からなる二次元検出器と、この二次元検出器との間に被検査体を載置するとともにX線焦点からこの検出手段の受光面に降ろした垂線に直交する回転軸を備え設定に基づく所定の角度変位で回転する回転基台を有し、被検査体の透過X線を二次元検出器により撮像してデジタル化された各角度位相毎の複数の画像データとして処理し、これら各画像データより内部構造データを再構成することによって被検査体内部を検査及び観察等行うことができる。
上述のような産業用X線断層撮像装置を用いて精緻なアーチファクトの少ない再構成画像を得ようとするとき、従来、例えば被検査体の大きさが直径10mm以上もありかつ要求される空間分解能が10μm以下であるような場合には、二次元検出器の大きさに制限があるため、被検査体回転機構を例えば4周以上(360°×4回転以上)させて360°毎に二次元検出器を移動させて被検査体の4分割(あるいは8分割)された部分投影を合成し全投影を得る方法があった。
また、一つの検出器を使用しX線焦点に近く拡大率が小さい位置と、X線焦点から遠ざかり拡大率が大きい位置の2箇所で、拡大率が異なる2種の投影データを取得して、それらを合成しアーチファクトが軽減された再構成画像を得る方法があった。
また、第1及び第2の放射線検出手段を放射線入射方向に対し重ねるように配置することで、1回の放射線照射で特性の異なる2種の放射線画像を同時に得ることを可能としたものが提案されている(例えば、特許文献1参照。)。
特開平9−197585号公報
しかしながら、上述の被検査体回転機構を例えば4周以上(360°×4回転以上)させて360°毎に二次元検出器を移動させて被検査体の4分割(あるいは8分割)された部分投影を合成し全投影を得る方法によると、特定部位を高い空間分解能で観察することができるものの、被検査体の4周分以上の全投影データを得るには膨大な時間が必要であるという課題があった。
また、一つの検出器を使用しX線焦点に近く拡大率が小さい位置と、X線焦点から遠ざかり拡大率が大きい位置の2箇所で、拡大率が異なる2種の投影データを取得して、それらを合成しアーチファクトが軽減された再構成画像を得る方法によると、X線焦点から二次元検出器までの距離が2箇所の位置で大きく異なって、X線強度がX線焦点からの距離の2乗に反比例する逆2乗則に従うため2種の画像のそれぞれの輝度を合成時に整合させるキャリブレーションが難しいという課題があった。
また、特許文献1に記載のものは、1回の放射線照射で2種の画像を得ることができるので効率的であるが、被検査体特定部位のみの再構成画像の解像度を向上させることはできないとともに、2つの放射線検出手段のうちの一方のみを選択して投影することはできないという課題があった。
またさらに、被検査体が分子量の低い軽元素ばかりで構成されている物質であった場合、上記FPDの透過X線入射窓はアルミニウム(Al)から構成されたものが主流であり、X線源管電圧40kV未満の設定では入射窓自体のX線吸収作用により被検査体の投影データを入手することは不可能であった。逆に、大型FPDよりも画素サイズが小さく、波長の長い低エネルギーX線を透過し得る入射窓を持つ例えばイメージインテンシファイア管などからなる小型検出器では、一般に検出面積が狭く、被検査体全投影が検出面に収まらなかったという課題があった。
斯かる点に鑑み、本発明は、被検査体の全体投影像とともに特定部位のみ高解像度の部分投影像を比較的短時間で取得し、また2つの検出器から得られた投影画像の合成処理を容易にし、さらに非金属(軽金属含む)及び重金属の被検査体いずれにも対応できるようにすることを目的とする。
上記課題を解決し、目的を達成するため、本発明は、X線源と、被検査体の透過X線を撮像する二次元検出手段と、X線源のX線焦点と二次元検出手段との間に配置され被検査体を載置して所定角度変位で回転する回転基台とを有し、各角度位相毎に撮像した投影像より被検査体の内部構造データを再構成するものであって、この二次元検出手段は、第1検出器と、この第1検出器より検出面積及び画素サイズの小さい第2検出器とから構成され、第2検出器により被検査体の部分投影像を所定拡大率で所定角度変位毎に撮像し、第2検出器に換えてX線焦点から第2検出器までの距離と等しい位置に第1検出器を配置し、この第1検出器により被検査体の全体投影像を所定角度変位毎に撮像し、第1検出器より得られた各角度位相毎の全体投影像の所定部位を、第2検出器より得られた各角度位相毎の部分投影像で置換して合成投影像を作成し、各角度位相毎に作成された合成投影像を基に被検査体の内部構造データを再構成することを特徴とする。
好ましくは、上述の第2検出器は第1検出器の入射窓では透過されない低エネルギーX線を透過する入射窓を持つことが好適である。
斯かる本発明によれば、検出面積が及び画素サイズが小さい第2検出器により被検査体の部分投影像を所定拡大率で所定角度変位毎に撮像し、第2検出器に換えてX線焦点から第2検出器までの距離と等しい位置に第1検出器を配置し、この第1検出器により被検査体の全体投影像を所定角度変位毎に撮像し、第1検出器より得られた各角度位相毎の全体投影像の所定部位を、第2検出器より得られた各角度位相毎の部分投影像で置換して合成投影像を作成し、各角度位相毎に作成された合成投影像を基に被検査体の内部構造データを再構成するので、被検査体の全体投影像とともに特定部位のみ高解像度の部分投影像を比較的短時間で取得できる。また、2つの検出器の拡大率を等しくして撮像処理を行うので画像合成処理が容易になる。また、第2検出器は低エネルギーX線を透過する入射窓を備えているので、非金属の被検査体の透過X線投影像を撮像できる。
本発明によれば、検出面積が及び画素サイズが小さい第2検出器により被検査体の部分投影像を所定拡大率で所定角度変位毎に撮像し、第2検出器に換えてX線焦点から第2検出器までの距離と等しい位置に第1検出器を配置し、この第1検出器により被検査体の全体投影像を所定角度変位毎に撮像し、第1検出器より得られた各角度位相毎の全体投影像の所定部位を、第2検出器より得られた各角度位相毎の部分投影像で置換して合成投影像を作成し、各角度位相毎に作成された合成投影像を基に被検査体の内部構造データを再構成するので、被検査体の全体投影像とともに特定部位のみ高解像度の部分投影像を比較的短時間で取得できる効果がある。また、2つの検出器の拡大率を等しくして撮像処理を行うので2つの検出器から得られた投影画像の合成処理が容易になる効果がある。
また、第2検出器は低エネルギーX線を透過する入射窓を備えるようにした場合、非金属からなる被検査体の透過X線投影像を撮像でき、非金属及び重金属の被検査体いずれにも対応できるという効果がある。
以下、図1〜図11を参照して、本発明の一実施の形態の例について説明する。図中、対応する部分には同一符号を付して示す。
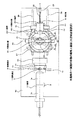
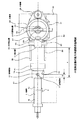
図1は、X線を用いて微小被検査体の内部構造を検査する非破壊検査の用途に使用されるX線断層撮像装置の概略上面図であり、図2は同概略側面図である。図1及び図2ともに二次元検出器20が選択された場合を示している。なお、図1において後述する二次元検出器20の旋回駆動機構を透視したような図としてあり、図2において大歯車及びその周辺を透視したような図としてある。
図1及び図2に示されるX線断層撮像装置は大きく、X線源1、X線が照射される被検査体10を載置する回転基台11、被検査体10を透過したX線を検出する比較的大きな検出面を有する二次元検出手段(以下、大型検出器と称する。)20、大型検出器20より検出面積及び画素サイズが小さい二次元検出手段(以下、小型検出器と称する。)40、そしてそれぞれを支持し移動可能な各駆動機構、及びこれら一切を載置し振動除去機能を備えた定盤50から構成される。
X線管1は、例えばコーンビーム状のX線を発生する公知のマイクロフォーカスX線源であり、X線管1から被検査体10に対しコーンビーム状のX線を出射し被検査体10全体にX線を照射する。図2に示されるように、このX線管1本体は、前部筐体1aと後部筐体1bがヒンジ2により連結された構成とされ、X線焦点近傍のL字状ブラケット3とX線管1の重量の重心1cの直下のブラケット3水平面上に設けられたVブロック4とによって定盤50上に支持されている。
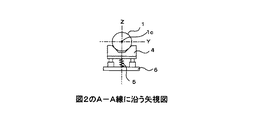
図3は、図2のA−A線に沿う矢視図であり、X軸方向から見たVブロック4の概略図である。図3及び図2に示されるように、Vブロック4はブラケット3上の回動支点7を軸に回動可能なVブロック受け台6に弾性体5を介して載置される。このようにブラケット3と重心1cの直下にVブロック4を置くことにより、X線管1のカソード(図示略)の位置出しが容易となるばかりでなく、ヒンジ2による連結を解除しカソードを交換する際、X線管1の後部筐体1bを弾性力で支持するので、カソード座標調整などの精密な機械作業が水平置の姿勢でも容易となる。X線管1本体連結部のヒンジ2の回転軸とVブロック受け台6の回動支点7は略同軸上にある。
図1に示される被検査体10は、被検査体10を回転させるための例えば駆動モータ及び軸受け(図示略)等より構成される回転基台11上に保持され、X線管1のX線焦点から後述する大型検出器20及び小型検出器40の検出面に降ろした垂線と直角に交わる回転軸を中心に回転する。また、回転基台11と締結されZ軸方向に可動するZ軸可動部13と、Y軸方向に可動するY軸可動部14と、定盤50に固定された直動案内部15によって、Z軸方向への駆動機構及びY軸方向への駆動機構が構成されており、Z軸可動部13に載置された被検査体10がZ軸方向及びY軸方向へ移動可能となっている。
さらに回転基台11は、例えば空気軸受け(図示略)によって支持されて、この空気軸受けに同軸上に直結された例えば0.2分以下の角度位置決め精度を持つサーボモータ(図示略)及び回転位相検出手段(図示略)により、これらサーボモータ及び回転位相検出手段の分解能に応じた各角度変位において、再構成に必要な上記投影データの取り込み期間に同期して静止される。回転基台11の軸受けの回転軸はX線管1の焦点から大型検出器20及び小型検出器40の検出面へ降ろした垂線と直交している。本例では回転基台11を微少角度変位制御できる空気軸受けよりなるが、これに限るものではなく、回転基台11を支持し滑らかに回転して微少角度変位制御できるものであればよい。
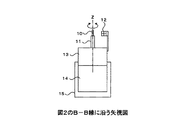
図4は、図2のB−B線に沿う矢視図であり、X軸方向からみた被検査体10駆動機構の概略図である。Z軸可動部13上には、例えば直角に張られた細いワイヤのようないわゆるファントムモデルと呼ばれる基準検査体12が被検査体10中心と略同じ高さに設置されており、後述する大型検出器20及び小型検出器40の相互位置合わせに使用される。
図2に示される大型検出器20は、被検査体10を透過したX線を検出し投影データを取得するのに用いられるフラットパネルディテクタ(以下、FPDという。)であり、本例では、例えば検出面がA4判サイズ以上の面積で、画素サイズが120μm×120μm以上、検出可能なX線管1の管電圧レンジを40〜150kVとしている。本例では大型検出器20を例えば公知のFPDから構成するものとしているが、周知技術を用いてX線を検出し画素毎に処理して画像信号を得られるものであればよい。
図1及び図2に示されるように、大型検出器20は、回転基台11回転軸と平行でかつ大型検出器20の水平面内における略中心を回転軸とする回転手段の大歯車24の中央部に収納され、この大歯車24は小型検出器40が載置された回転手段小歯車25と係合し軸受け26を介して回転するようになされている。
大型検出器20の検出面は支持体21によってX線管1のX線焦点から被検査体略中心を通る直線と直角となるように設置され、この支持体21は大型検出器20を垂直方向に移動可能とする駆動機構を備えている。さらに、支持体21と締結された直動機構を構成する水平可動部22が直動案内部23上を水平方向に移動することによって大型検出器20を検出面と平行な水平方向へ移動させることができる。
さらに小型検出器40を旋回させるための駆動モータが取り付けられたステージ27を支持するステージ29の中央部には、大型検出器20を収納するとともに旋回可能とするための孔28が穿設されている。大型検出器20を水平方向に移動させるのに使用される水平可動部23下面の端部近傍に凸部(カムフォロワー)33が設けられており、この凸部33を例えば溝を有する係合部材32と係合させ、係合部材32を検出器基台34に設けられた旋回案内部31上で直線的にスライド移動させることにより、直動案内部23上に搭載された大型検出器20を直動案内部23と一体に、例えばY軸に対し±30°の角度未満で回転基台11の回転軸と平行な軸に対し旋回させることができる。このときの旋回角度は回転軸30に直結されたエンコーダ35の指示値に基づき制御される。
本例では、大型検出器20の旋回駆動を従来用いられていたダイレクトドライブモータ(インデックスモータ)で行わず、より角度精度を出しやすく衝突や暴走の懸念のない例えばボールネジ駆動(直動)機構などを旋回駆動系に用いている。
上述の大型検出器20を旋回させるための駆動機構を利用し、被検査体10の領域を分割して撮像することで特定部位を高い空間分解能で観察することができる。例えば、被検査体の一部分が二次元検出器に投影されるよう回転基台及び/又は二次元検出器の位置を調整し、この被検査体の一部分を各角度位相毎に撮像して例えば左半分の部分投影像群を得、次に被検査体の残り部分が二次元検出器に投影されるよう回転基台及び/又は二次元検出器の位置を調整し、この被検査体の残り部分を各変位毎に撮像して右半分の部分投影像群を得、これら左半分及び右半分の部分投影像群から、普通に撮像された投影像と比して約2倍の被検査体全体の拡大内部構造データを算出する。なお左右半分ずつの2分割でなく、左右半分をさらに分割し被検査体を4分割した投影像撮像により約4倍の拡大率の拡大内部構造データを得ることもできる。
また図2に示される小型検出器40は、被検査体10の所望の特定部位の内部構造データを得るために使用されるものであり、例えばイメージインテンシファイア管(以下、I−I管という。)から構成する。この小型検出器40は、例えば、検出面の検出面積が100mm×100mm未満で、画素サイズは100μm×100μm未満とする。一般に、非金属の物質においては、管電圧が40kV前後以上のときに発生する比較的短波長のX線を照射すると真っ白な投影像が得られる。逆に、非金属の投影像を撮像しようとして管電圧を下げて波長の長いX線を照射すると検出器の入力窓の材質によっては入力窓でX線が吸収されて出力蛍光面42に到達しない。本例では、上述の大型検出器20よりも低い40kV未満のX線管1管電圧により発生する制動放射線でも透過し得る低エネルギーX線透視に対応したものとして、例えばベリリウム(Be)入射窓を採用する。
なお、小型検出器40は、上述大型検出器20よりも検出面積及び画素サイズが小さく、かつ大型検出器20では検出できない低エネルギーX線の検出が可能なものであればよく、この例に限るものではない。
また小型検出器40を旋回させるための小歯車25は、ステージ27に固定された駆動モータ47の駆動軸46と直結され位置決めされるとともに、大歯車24と係合するようになされている。さらに小型検出器40は水平可動部44上に締結され、水平可動部44がステージ43上の直動案内部45上を移動することにより検出面に平行な面内の水平移動が可能になっている。
ここで、図5は小型検出器40を選択した場合のX線断層撮像装置の概略上面図、図6は同概略側面図を示すものである。駆動モータ47により小歯車25を回転させることによって大歯車24が小歯車25に追従して回転する。これにより小型検出器40をステージ43と一体に180°旋回させることができ、小型検出器40を大型検出器20の前方に移動させて小型検出器40の入力蛍光面41がX線焦点に対峙可能となる。したがって、X線焦点から被検査体10回転軸に直角に交わる直線の延長線上に小型検出器40と大型検出器20を選択的に配置することができる。
これら大型検出器20及び小型検出器40を載置する検出器基台34は、駆動部37を駆動させることにより駆動軸38を介してレール36上をX軸方向(光軸主線方向)に移動することができるので、X線焦点と大型検出器20及び小型検出器40までの距離調整が可能である。
本例では、2種の二次元検出器すなわち大型検出器20をFPD、小型検出器40をI−I管の組み合わせとしたが、被検査体10を透過したX線を検出し画素毎に処理して画像信号を得られるものであればよい。大型検出器20を大型で画素の粗いFPDとし小型検出器40を小型で大型検出器20より画素の細かいFPDとした組み合わせでもよい。また小型検出器40の画素数は大型検出器40の画素数より少なくても構わない。
図7は、本発明の一実施の形態の構成例を示すブロック図を示す。X線管1は回転基台11上に載置された被検査体10に対しX線を照射するものである。このとき照射されるX線の強度、焦点サイズ等は、X線制御手段であるX線制御部61を通じて制御操作手段である制御操作卓64により制御される。
回転基台11の位置、回転角度ピッチ、初期回転角等は、回転基台11を載置したZ軸可動部13、Y軸可動部14、直動案内部15の動きを制御する機構制御部62を通じて制御操作卓64により制御される。回転基台11に載置された被検査体10は制御操作卓64によって指定された角度回転され、その投影像は二次元検出手段である大型検出器20又は小型検出器40により撮像される。
制御操作卓64は、キーボードやマウス等の入力手段、機器動作状態や入力値等を表示するGUI(Graphical User Interface)を備えた表示手段、入力操作信号の処理やROM(図示略)等に格納されたプログラムに従い後述する所定の制御等を行うプロセッサからなる制御手段を有する。そして、制御操作卓64は、X線管1より出射されるX線のX線強度等の情報を制御操作卓64に取り込み表示手段に表示し、被検査体10の適切な位置出しを行うにあたり機構制御部62を通じて回転基台11に指令を出し、大型検出器20又は小型検出器40を選択しそれぞれの駆動系に対して指令を出すなどする。
制御操作卓64で選択された大型検出器20又は小型検出器40は、被検査体10を透過したX線投影像を投影像記憶部65に送出する。この投影像は制御操作卓64からの指示により、デジタル化された投影データとして大容量の磁気記録装置等からなる投影像記憶部65に、撮像時の回転角度や初期回転角、X線強度等の情報と対応して保存される。そして投影像記憶部65に記憶された投影データは、これと接続された再構成計算部66に供給される。この投影像記憶部65は投影データを記録できる記録容量を有するものであればこれに限るものではなく、光ディスクや半導体メモリ等のリムーバブルな記録媒体などを含め、さまざまなものを適用することができる。
再構成計算部66では入力された投影データより内部構造データを再構成計算し、再構成した内部構造データを投影像記憶部65あるいは外部記録媒体等に記憶するとともに、図示しない表示メモリを介して表示手段である再構成結果表示部67に出力し、CRTモニタ等のディスプレイに表示する。また再構成計算部66は大型検出器20で撮像された投影データの特定部位を、小型検出器40で撮像された投影データで置換する投影像置換処理も行う。この再構成計算部66は、入力される投影データを収集して内部構造データを再構成できる演算処理能力があればよく、制御操作卓64の制御手段と共用でもよい。また、再構成結果表示部67の表示手段は制御操作卓の表示手段と共用であってもよい。
以上のような構成により、被検査体10の内部構造データが再構成結果表示部67に入力されて内部構造が表示され、微小な電子部品素子等の被検査体内部のひび割れや断線などの欠陥の有無を視覚的に確認することができる。
次に、上述したX線断層撮像装置による被検査体合成画像の取得方法について説明する。以下に述べる例では、被検査体10は分子量の低い軽元素から構成された物質とする。
図8は被検査体合成画像取得処理を示すフローチャートである。まず始めに検査対象物質の被検査体10を回転基台11上に取り付ける(ステップS1)。このときの被検査体10の位置を角度原点位置とする。そして制御操作卓64に対し入力操作を行い、まず検出面積が小さく画素の細かい、かつ低エネルギーX線を検出できる小型検出器40を選択し図1に示す状態から180°旋回させ、図5に示すように入力蛍光面41をX線焦点に対面させる(ステップS2)。そして駆動部37を駆動させて小型検出器40をX軸方向に移動してX線焦点からの距離を調整し、所定の拡大率に設定(ステップS3)する。
ここでY軸可動部14を動かして基準検査体12をY軸方向に移動させ、Y軸可動部14に設置された基準検査体12を角度原点位置設定時の被検査体10と同じ位置に配置して小型検出器40の透視野へ映し出す。そしてこのときの基準検査体12の投影像を取得して投影像記憶部65に記憶しておき、投影像取得後は被検査体10を元の位置に戻す。
次にX線管1をオンにして(ステップS4)、被検査体10の投影像撮像を開始し、回転基台11を回転させて被検査体10を所定角度旋回させて静止させる(ステップS5)。X線を被検査体10に照射し、小型検出器40により部分投影像を撮像して投影データを投影像記憶部65に保存する(ステップS6)。制御操作卓64の制御手段は、必要とする所定枚数の部分投影データの取得が完了したかどうかを判断し(ステップS7)、部分投影データの取得が完了していない場合、ステップS5の処理に戻り、所定枚数の部分投影データの取得が完了するまで被検査体10の所定角度変位毎の部分投影データを取得する処理を繰り返す。一方、部分投影データの取得が完了した場合にはX線管1をオフにしてX線照射を停止する(ステップS8)。
次に、制御操作卓64に対し入力操作を行い、大型検出器20を選択し180°旋回させ、大型検出器20の検出面をX線焦点に対面させる(ステップS9)。
図9及び図10は、X線焦点から小型検出器40及び大型検出器20のそれぞれの検出面までの距離調整の説明に供する図である。拡大率を等しくするためには、X線焦点から小型検出器40の検出面までの距離と小型検出器40の撮像位置における検出面をその面内に含む仮想平面までの距離とが等しい位置に大型検出器20を移動させる必要がある。すなわち、図9に示されるように小型検出器40を選択時のX線焦点から検出面41までの距離A、X線焦点から被検査体10までの距離Bとした場合、図10に示される大型検出器20を選択時においてもX線焦点から検出面20aまでが距離Aであり、X線焦点から被検査体10までが距離Bとなるように、駆動軸37を駆動し大型検出器20をX軸方向(光軸主線方向)に移動させて上述のX線焦点からの距離を調整して等しくする(ステップS10)。
このようにX線焦点から2種の検出器の検出面までの距離を等しくすることによって被検査体投影像の拡大率が等しくなり、後に行う2種の検出器から得られた投影データの画像合成処理が容易になる。
ここで、再びY軸可動部14を動かして基準検査体12をY軸方向に移動させ、Y軸可動部14に設置された基準検査体12を被検査体10に換えて同じ位置に配置し、大型検出器20の透視野へ映し出す。そしてこのときの基準検査体12の投影像を取得して投影像記憶部65に記憶する。
図11は画像合成の説明に供する図であり、Aは基準検査体12を使用して行われる相互位置合わせ、Bは画像合成処理後の合成画像の例を表している。図11Aに示されるように、先の小型検出器40により撮像された部分投影像80及び大型検出器20により撮像された全体投影像70のそれぞれのアライメントマーク(基準検査体12の投影像)12aを重ねるようにして相互位置合わせを行い、例えば、2つのアライメントマーク12aがずれている場合は大型検出器40を検出面に平行な面内で移動させて各アライメントマーク12aの位置を合わせ、小型検出器20及び大型検出器40相互のX線焦点に対する撮像位置を同じにする。同時に、各アライメントマーク12aの位置合わせを行うことにより、小型検出器40による部分投影像80と大型検出器20による全体投影像70を同じ拡大率に調整することができる。
このように、基準検査体12を設けそのX線投影像を基に小型検出器40及び大型検出器20の相互位置合わせを行うことによって、X線焦点から小型検出器40及び大型検出器20のそれぞれの検出面までの距離調整及び位置合わせをより高精度に行うことができる。
上述の小型検出器40及び大型検出器20の相互位置合わせ終了後、被検査体10を元の角度原点位置に戻す(ステップS11)とともに、X線管1をオンにする(ステップS12)。続いて回転基台11を回転させて被検査体10を上述小型検出器40のときと同様の所定角度旋回させて静止させる(ステップS13)。そして、X線を被検査体10に照射し、大型検出器20により全体投影像を撮像して投影データを投影像記憶部65に保存する(ステップS14)。制御操作卓64の制御手段は、必要とする所定枚数の全体投影データの取得が完了したかどうかを判断し(ステップS15)、全体投影データの取得が完了していない場合、ステップS13の処理に戻り、所定枚数の全体投影データの取得が完了するまで被検査体10の所定角度変位毎の全体投影データを取得する処理を繰り返す。一方、全体投影データの取得が完了した場合にはX線管1をオフにしてX線照射を停止する(ステップS16)。
次に、各角度位相毎に撮像された部分投影像及び全体投影像について、全体投影像の一部を部分投影像に置換し、合成画像を作成する(ステップS17)。大型検出器20により取得した全体投影像70の一部を小型検出器40により取得した部分投影像80と置換することにより、図11Bに格子表示による画素サイズのイメージを示すように、被検査体特定部位について精緻な解像度を持つ画像データを得ることができる。
そして、再構成計算部66にて上述の各角度位相毎に作成された合成画像を基に再構成計算して被検査体10の合成内部構造データを算出し(ステップS18)、処理を終了する。
以上述べた一実施の形態の例によれば、画素の細かい小型検出器40の検出面で被検査体10の特定部位について360°分の所定角度変位毎の部分投影像を取得し、さらに小型検出器40のときと同じ所定角度毎に小型検出器40検出面を含む平面と同一平面内に小型検出器40より画素が粗く大きな検出面を持つ大型検出器20によって被検査体10の全体投影像を同じ拡大率にて取得する。然るのちに、大型検出器20で取得した全体投影像を、大型検出器20と全く同じ被検査体角度位相の小型検出器40で取得した部分投影像と部分的に置換し、その結果得られた被検査体10の全体投影像を欠けることなく合成された投影データを用いて再構成計算し内部構造データを算出する。
したがって、例えば底面直径が10mm以上の円筒形状のような大きな被検査体であり、また再構成画像の例えば空間分解能10μm未満の細緻な解像度を要求される被検査体であっても、被検査体全体の再構成画像を取得しつつ特定部位の再構成画像の取得を短時間で行うことができる。
また、本例において被検査体10を構成する物質が軽元素群のみである場合、X線管1の管電圧を例えば40kV未満に設定し、かつアルミニウム以外の特定の入射窓、例えばベリリウム入射窓を持つ小型検出器40を選択し、その検出面に所定の拡大率で被検査体10の全体投影が入るように被検査体10を寸断し、被検査体回転基台11に載置し旋回せしめることによって軽元素群から構成される被検査体10の投影像を取得することができる。したがって、例えば軽元素のみからなる被検査体は2種の検出器のうち軟X線でも透過し得る入射窓を持つ小型検出器40のみを用い、例えば直径10mm以上の重金属が混在する被検査体の場合は画素が粗いが検出面積が広い検出面を持つ検出器を選択することができるので、非金属(軽金属含む)及び重金属の被検査体いずれにも対応することができる。
また、小型検出器40による部分投影像と大型検出器20による全体投影像の拡大率が同一となるよう調整したことにより、これら2種の検出器に照射されるX線強度が等しくなり画像合成時のキャリブレーションにおいて2種の検出器から得られる各画像データの輝度を容易に整合させることができる。
さらに、本例において被検査体10の特定部位を高い空間分解能で観察することが、従来技術に記載にした被検査体回転機構を例えば4周以上(360°×4回転以上)させて360°毎に二次元検出器を移動させて被検査体の4分割(あるいは8分割)された部分投影を合成し全投影を得るという方法の約半分未満の時間で可能であるばかりでなく、例えば上記特定部位が被検査体10の回転中心軸の回りをまわる位置であった場合は、水平可動部44により被検査体10の投影像を小型検出器40の視野角に入るように追随させて投影データを取得した後、大型検出器20の投影データと合成させることができる。
さらにまた、上述の大型検出器20を旋回させるための駆動機構を利用し被検査体10の領域を分割して撮像することで特定部位を高い空間分解能で観察することができる技術と本発明の技術を組み合わせて、例えば被検査体10を4分割して投影像を投影し大型検出器4枚分の拡大視野で観察しつつ、さらにその内部の特定部位のみを小型検出器40で撮影し、大型検出器20と小型検出器40の画素サイズの比分の高い分解能で特定部位の再構成画像を得ることもできる。
次に、本発明の他の実施の形態の例について説明する。図12はX線断層撮像装置の他の実施の形態を示し、大型検出器が選択されている場合の概略上面図を表している。図12において、図1に対応する部分には同一符号を付して示している。図12に示されるように、大型検出器20の載置場所が大歯車24の回転と独立した位置から大歯車24上面に変更されている点が図1との大きな相違点であり、その他は図1と同様の構成である。
図12において、ステージ90は大歯車24の上面に小型検出器40を載置するステージ43と180°対向して設置され、ステージ43と同様に小歯車25に係合して回転する大歯車24の回転に応じて旋回する。またステージ90は直動案内部91を載置し、小型検出器40はその検出面に平行な面内の水平移動ができるように構成されている。
図12に示されるように、ステージ90に載置された大型検出器20とステージ43に載置された小型検出器40は、それぞれの検出面から大歯車24回転中心軸までの距離L1とL2が等しい。したがって、図8に示すステップS9の処理において、小型検出器40による投影像撮像終了後、小歯車25により大歯車24を180°回転させるだけで小型検出器40に換えて大型検出器20を同じ位置に配置できるので、小型検出器40のときと同じ拡大率での投影像の撮像が実行可能である。
以上述べたように本例は、大型検出器20を載置するステージ90と小型検出器40を載置するステージ43を一枚の回転体である大歯車24の上面に設置し、大歯車24が180°回転するのみにより上記2種の検出器が同じ拡大率で投影データを取得することができる機構となっている。したがって、X線焦点から各検出面までの距離調整のための駆動部37及び駆動軸38の機構を介在させないので、機械的精度を向上させることができる。その他、本例は上述した一実施の形態の例と同様の作用効果を奏する。
なお、本発明は上述した実施の形態の例に限られるものではなく、本発明の要旨を逸脱することなくその他種々の構成を取り得ることは勿論である。
1…X線管、10…被検査体、11…回転基台、12…基準検査体、12a…アライメントマーク、13…Z軸可動部、14…Y軸可動部、15…直動案内部、20…大型検出器、20a・・・検出面、21…検出器支持体、22…水平可動部、23…直動案内部、24…大歯車、25…小歯車、26…軸受け、27…ステージ(上側)、28…孔、29…ステージ(下側)、30…回転軸、31…旋回案内部、32…係合部材、33…凸部、34…検出器基台、35…エンコーダ、36…レール、37…駆動部、38…駆動軸、40…小型検出器、41…入力蛍光面(検出面)、42…出力蛍光面、43…ステージ、44…水平可動部、45…直動案内部、46…駆動軸、47…駆動モータ、61…X線制御部、62,63…機構制御部、64…制御操作卓、65…投影像記憶部、66…再構成計算部、67…再構成結果表示部、70…全体投影像、80…部分投影像、90…ステージ、91…直動案内部
Claims (8)
- X線源と、被検査体の透過X線を撮像する二次元検出手段と、前記X線源のX線焦点と前記二次元検出手段との間に配置され前記被検査体を載置して所定角度変位で回転する回転基台とを有し、各角度位相毎に撮像した投影像より前記被検査体の内部構造データを再構成するX線断層撮像装置であって、
前記二次元検出手段として、第1検出器と、該第1検出器より検出面積及び画素サイズの小さい第2検出器と、
前記X線焦点から前記被検査体回転軸に直角に交わる直線の延長線上に前記第1検出器と前記第2検出器を選択的に配置するとともに、前記X線焦点から前記第2検出器の検出面までの距離と前記第2検出器の撮像位置における検出面をその面内に含む仮想平面までの距離とが等しい位置に前記第1検出器を移動させる駆動機構と、
前記第1検出器より得られる全体投影像の所定部位を、前記第2検出器より得られる部分投影像で置換する投影像置換手段とを備える
ことを特徴とするX線断層撮像装置。 - 前記駆動機構は、前記回転基台回転軸と平行かつ前記第1検出器の水平面内における略中心を回転中心とする回転軸を有し、上面に前記第2検出器が設置された第1回転手段と、
前記第1回転手段と係合し前記第1回転手段を回転させる第2回転手段とを備える
ことを特徴とする請求項1記載のX線断層撮像装置。 - 前記第2検出器は、前記第1検出器の入射窓では透過されない低エネルギーX線を透過する入射窓を持つ
ことを特徴とする請求項1記載のX線断層撮像装置。 - 前記駆動機構は、前記第1及び第2検出器をそれぞれの検出面に平行な面内に水平移動させるとともに、少なくとも前記第1及び第2検出器の一方を垂直方向へ移動させ、所定位置に設けられた基準検査体の投影像を利用して、前記第1及び第2検出器の検出面に平行な面内において前記第1及び第2検出器の相互位置合わせを行う
ことを特徴とする請求項1記載のX線断層撮像装置。 - 前記駆動機構は、前記X線焦点から前記被検査体回転軸に直角に交わる直線の延長線上に前記被検査体回転軸と平行な回転軸を持ち、上面の前記回転軸からそれぞれの検出面までの距離が等しい位置に前記第1検出器及び前記第2検出器が設置された第1回転手段と、
前記第1回転手段と係合し前記第1回転手段を回転させる第2回転手段とを備える
ことを特徴とする請求項1記載のX線断層撮像装置。 - X線源と、被検査体の透過X線を撮像する二次元検出手段と、前記X線源のX線焦点と前記二次元検出手段との間に配置され前記被検査体を載置して所定角度変位で回転する回転基台とを有し、各角度位相毎に撮像した投影像より前記被検査体の内部構造データを再構成するX線断層撮像方法であって、
前記二次元検出手段は、第1検出器と、該第1検出器より検出面積及び画素サイズの小さい第2検出器とから構成され、
前記第2検出器により前記被検査体の部分投影像を所定拡大率で前記所定角度変位毎に撮像し、
前記第2検出器に換えて前記X線焦点から前記第2検出器までの距離と等しい位置に前記第1検出器を配置し、
前記第1検出器により前記被検査体の全体投影像を前記所定角度変位毎に撮像し、
前記第1検出器より得られた各角度位相毎の前記全体投影像の所定部位を、前記第2検出器より得られた各角度位相毎の部分投影像で置換して合成投影像を作成し、
前記各角度位相毎に作成された合成投影像を基に前記被検査体の内部構造データを再構成する
ことを特徴とするX線断層撮像方法。 - 前記第2検出器は、前記第1検出器の入射窓では透過されない低エネルギーX線を透過する入射窓を持つ
ことを特徴とする請求項6に記載のX線断層撮像方法。 - 前記第2検出器による前記被検査体撮像時に、所定位置に設けられた基準検査体の投影像を撮像し、
前記第1検出器による前記被検査体撮像時に、前記基準検査体の投影像を撮像し、
前記基準検査体の2つの投影像を重ね合わせて、前記第1及び第2検出器の検出面に平行な面内において前記第1及び第2検出器の相互位置合わせを行う
ことを特徴とする請求項6記載のX線断層撮像方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110306A JP2005292047A (ja) | 2004-04-02 | 2004-04-02 | X線断層撮像装置及びx線断層撮像方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110306A JP2005292047A (ja) | 2004-04-02 | 2004-04-02 | X線断層撮像装置及びx線断層撮像方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005292047A true JP2005292047A (ja) | 2005-10-20 |
Family
ID=35325125
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004110306A Pending JP2005292047A (ja) | 2004-04-02 | 2004-04-02 | X線断層撮像装置及びx線断層撮像方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005292047A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009122982A (ja) * | 2007-11-15 | 2009-06-04 | Jfe Engineering Corp | 分割撮像画像を用いた画像構築方法、放射線を用いた欠陥検査方法 |
| JP2010139454A (ja) * | 2008-12-15 | 2010-06-24 | Shimadzu Corp | X線ct装置 |
| JP2011122930A (ja) * | 2009-12-10 | 2011-06-23 | Hitachi Ltd | 産業用x線ct装置および撮像方法 |
| JP2013110648A (ja) * | 2011-11-22 | 2013-06-06 | Seiko Epson Corp | 棒状ワーク撮像装置および棒状ワークの先端同心判定装置 |
| WO2016195058A1 (ja) * | 2015-06-05 | 2016-12-08 | 地方独立行政法人東京都立産業技術研究センター | 画像取得装置及び画像取得方法並びに画像補正プログラム |
| US10521936B2 (en) | 2013-05-29 | 2019-12-31 | Tokyo Metropolitan Industrial Technology Research Institute | Device and method for image reconstruction at different X-ray energies, and device and method for X-ray three-dimensional measurement |
| US10627353B2 (en) | 2016-05-24 | 2020-04-21 | Jed Co., Ltd | X-ray inspection apparatus and method for controlling X-ray inspection apparatus |
-
2004
- 2004-04-02 JP JP2004110306A patent/JP2005292047A/ja active Pending
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009122982A (ja) * | 2007-11-15 | 2009-06-04 | Jfe Engineering Corp | 分割撮像画像を用いた画像構築方法、放射線を用いた欠陥検査方法 |
| JP2010139454A (ja) * | 2008-12-15 | 2010-06-24 | Shimadzu Corp | X線ct装置 |
| JP2011122930A (ja) * | 2009-12-10 | 2011-06-23 | Hitachi Ltd | 産業用x線ct装置および撮像方法 |
| JP2013110648A (ja) * | 2011-11-22 | 2013-06-06 | Seiko Epson Corp | 棒状ワーク撮像装置および棒状ワークの先端同心判定装置 |
| US10521936B2 (en) | 2013-05-29 | 2019-12-31 | Tokyo Metropolitan Industrial Technology Research Institute | Device and method for image reconstruction at different X-ray energies, and device and method for X-ray three-dimensional measurement |
| WO2016195058A1 (ja) * | 2015-06-05 | 2016-12-08 | 地方独立行政法人東京都立産業技術研究センター | 画像取得装置及び画像取得方法並びに画像補正プログラム |
| JP2017003323A (ja) * | 2015-06-05 | 2017-01-05 | 地方独立行政法人東京都立産業技術研究センター | 画像取得装置及び画像取得方法並びに画像補正プログラム |
| CN108271412A (zh) * | 2015-06-05 | 2018-07-10 | 地方独立行政法人东京都立产业技术研究中心 | 图像取得装置、图像取得方法以及图像校正程序 |
| EP3306309A4 (en) * | 2015-06-05 | 2019-02-27 | Tokyo Metropolitan Industrial Technology Research Institute | PICTURE DEVICE, PICTURE CAPABILITIES AND IMAGE CORRECTION PROGRAM |
| US10520453B2 (en) | 2015-06-05 | 2019-12-31 | Tokyo Metropolitan Industrial Technology Research Institute | Image acquisition device, image acquisition method, and image correction program |
| US10627353B2 (en) | 2016-05-24 | 2020-04-21 | Jed Co., Ltd | X-ray inspection apparatus and method for controlling X-ray inspection apparatus |
| EP3745120A1 (en) | 2016-05-24 | 2020-12-02 | Jed Co., Ltd | X-ray inspection apparatus and method for controlling x-ray inspection apparatus |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7099432B2 (en) | X-ray inspection apparatus and X-ray inspection method | |
| JP4386812B2 (ja) | X線検査装置 | |
| JPWO2009078415A1 (ja) | X線検査装置および方法 | |
| EP4157094A1 (en) | Dual robot control systems for non-destructive evaluation | |
| JP6153105B2 (ja) | Ct装置 | |
| JP4640589B2 (ja) | X線撮影装置 | |
| JP5045134B2 (ja) | X線ct装置 | |
| JP5056284B2 (ja) | X線断層撮像装置およびx線断層撮像方法 | |
| JP2005292047A (ja) | X線断層撮像装置及びx線断層撮像方法 | |
| JP4561990B2 (ja) | X線撮影装置 | |
| KR101116456B1 (ko) | Ct 장치 | |
| JP4894359B2 (ja) | X線断層撮像装置及びx線断層撮像方法 | |
| JP5396846B2 (ja) | X線ct装置 | |
| JP4788272B2 (ja) | X線断層撮像装置及びx線断層撮像方法 | |
| JP5125297B2 (ja) | X線検査装置およびx線検査方法 | |
| JP5251264B2 (ja) | X線ct装置 | |
| JP2005134213A (ja) | X線断層撮像方法及び装置 | |
| JP2023135623A (ja) | X線システムを使用して平坦なオブジェクトの空間的広がりを再構築するためのデータを生成する方法 | |
| JP4155866B2 (ja) | X線断層撮像装置 | |
| JP2006071472A (ja) | Ct法およびct装置 | |
| JP4765354B2 (ja) | X線断層撮像装置及びx線断層撮像方法 | |
| JP2006266754A (ja) | X線断層撮像方法及びx線断層撮像装置 | |
| US20240057955A1 (en) | System and method for incorporating lidar-based techniques with a computed tomography system | |
| JP2007170926A (ja) | X線検査装置、断層画像異常表示装置、x線検査方法、断層画像異常表示方法、プログラム、および記録媒体 | |
| JP7849147B2 (ja) | Ct装置 |