JP2005291806A - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- JP2005291806A JP2005291806A JP2004104515A JP2004104515A JP2005291806A JP 2005291806 A JP2005291806 A JP 2005291806A JP 2004104515 A JP2004104515 A JP 2004104515A JP 2004104515 A JP2004104515 A JP 2004104515A JP 2005291806 A JP2005291806 A JP 2005291806A
- Authority
- JP
- Japan
- Prior art keywords
- pulse signal
- radar
- radar apparatus
- transmission
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
【課題】より確実に目標からの反射信号を検出可能なレーダ装置を得ること。
【解決手段】本発明にかかるレーダ装置は、相対距離算出部21が、自レーダ装置の位置情報および所定の伝送路を介して通知される近隣に存在する他のレーダ装置の位置情報に基づいて他のレーダ装置との相対距離を算出し、送信タイミング制御部22が、自レーダ装置が送信するパルス信号の送信時刻を所定の伝送路を介して他のレーダ装置に対して送信し、その後、送信時刻に達した段階でパルス信号を送信し、受信タイミング制御部23が、前記パルス信号の送信時間帯および他のレーダ装置が出力するパルス信号の受信時間帯において受信信号を通過させないように制御し、目標距離算出部24が、自レーダ装置が送信したパルス信号の送信時刻およびそのパルス信号に対する反射信号の受信時刻に基づいて目標との距離を算出する。
【選択図】 図1
【解決手段】本発明にかかるレーダ装置は、相対距離算出部21が、自レーダ装置の位置情報および所定の伝送路を介して通知される近隣に存在する他のレーダ装置の位置情報に基づいて他のレーダ装置との相対距離を算出し、送信タイミング制御部22が、自レーダ装置が送信するパルス信号の送信時刻を所定の伝送路を介して他のレーダ装置に対して送信し、その後、送信時刻に達した段階でパルス信号を送信し、受信タイミング制御部23が、前記パルス信号の送信時間帯および他のレーダ装置が出力するパルス信号の受信時間帯において受信信号を通過させないように制御し、目標距離算出部24が、自レーダ装置が送信したパルス信号の送信時刻およびそのパルス信号に対する反射信号の受信時刻に基づいて目標との距離を算出する。
【選択図】 図1
Description
本発明は、反射信号から目標の距離を検出するレーダ装置に関するものであり、特に、衛星を利用して近隣に存在するレーダ装置間で位置情報を共有可能なレーダ装置に関するものである。
一般的に、レーダ装置は、空中にパルス変調した電波を送信し、目標(ターゲット)から反射して戻ってきた信号を受信することによって、目標の距離を検出する。このとき、目標からの反射信号は、レーダ装置と目標との相対距離に比例した時間だけ遅延が付加される。
ここで、従来のレーダ装置における信号の送受信タイミングについて説明する。従来のレーダ装置は、パルス信号を送信する時間帯については、ブランク動作を行って、受信した信号を通過させず、それ以外の時間帯で受信した信号を通過させる(非特許文献1参照)。すなわち、ブランク動作の時間帯以外で受信した信号を目標からの反射信号として扱い、レーダ装置では、上記相対距離に比例した遅延時間に基づいて目標の距離を検出する。
また、従来のレーダ装置においては、一般的に近隣に存在するレーダ装置が単独で動作するので、通常、近隣に存在するレーダ装置同士は双方の正確な距離情報を把握していない。また、各レーダ装置が個別のタイミングでパルス信号やレンジゲートを動作させている。すなわち、従来のレーダ装置は、目標からの反射信号のほかに、近隣に存在するレーダ装置からのパルス信号等も受信し、その中から目標の距離を検出している(非特許文献1参照)。
Rader Handbook (Merrill Ivan Skolnik編 Mcgraw-Hill社) 19章、29章
しかしながら、上記従来のレーダ装置では、上述したとおり、目標からの反射信号と近隣に存在するレーダ装置からの送信信号とが受信タイミング(上記ブランク動作の時間帯以外)において共存することとなるため、これらの信号のどれが目標からの反射信号であるのかを区別することが困難である、という問題があった。
また、従来のレーダ装置では、上述したとおり、近隣に存在するレーダ装置の正確な位置情報を把握することができないので、すなわち、近隣に存在するレーダ装置からのパルス信号が到着するタイミングを推定することができないので、その時間帯にブランク動作を行うことができず、たとえば、近隣に存在するレーダ装置からのパルス信号がジャミングと同じ作用を引き起こして自レーダ装置が誤動作し、本来必要な目標からの反射信号を検出できない場合がある、という問題があった。
本発明は、上記に鑑みてなされたものであって、近隣に存在する他のレーダ装置の正確な位置および他のレーダ装置の送信タイミングを把握し、より確実に目標からの反射信号を検出可能なレーダ装置を得ることを目的とする。
上述した課題を解決し、目的を達成するために、本発明にかかるレーダ装置は、送信パルス信号に対する反射信号から目標の距離を検出するレーダ装置において、自レーダ装置の位置情報、および所定の伝送路を介して通知される近隣に存在する他のレーダ装置の位置情報、に基づいて、前記他のレーダ装置との相対距離を算出する相対距離算出手段(後述する実施の形態の相対距離算出部21に相当)と、自レーダ装置が送信するパルス信号の送信開始時刻および送信間隔を、前記所定の伝送路を介して前記他のレーダ装置に対して送信し、その後、前記送信開始時刻および前記送信間隔から得られる送信時刻に達した段階でパルス信号を送信する送信タイミング制御手段(送信タイミング制御部22に相当)と、前記パルス信号の送信時間帯において受信信号を通過させないように制御し、また、前記他のレーダ装置から前記所定の伝送路を介して通知されるパルス信号の送信開始時刻および送信間隔と、前記他のレーダ装置との相対距離と、に基づいて、前記他のレーダ装置が出力するパルス信号の受信時刻を算出し、当該パルス信号の受信時間帯において受信信号を通過させないように制御し、一方で、その他の時間帯において受信信号を通過させる受信タイミング制御手段(受信タイミング制御部23に相当)と、自レーダ装置が送信したパルス信号に対する反射信号を受け取り、自レーダ装置が送信したパルス信号の送信時刻および当該反射信号の受信時刻に基づいて目標との距離を算出する目標距離算出手段(目標距離算出部24に相当)と、を備えることを特徴とする。
この発明によれば、たとえば、GPS衛星および準天頂衛星を利用して、近隣に存在するレーダ装置の正確な位置を把握し、近隣に存在するレーダ装置が送信するパルス信号の受信時刻(受信タイミング)を特定可能な構成とした。さらに、自レーダ装置が送信したパルス信号に対する反射信号と、近隣に存在するレーダ装置が送信するパルス信号と、が受信タイミングにおいて共存する場合であっても、他のレーダ装置が送信するパルス信号の受信時間帯で受信パルス信号を通過させない構成とした。
この発明によれば、上記のように、近隣に存在するレーダ装置の正確な位置を把握し、他のレーダ装置が送信するパルス信号の受信時間帯で受信パルス信号を通過させないこととしたので、より確実に自レーダ装置が送信したパルス信号に対応する反射信号を検出できる、という効果を奏する。
以下に、本発明にかかるレーダ装置の実施の形態を図面に基づいて詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。
本実施の形態では、確実に目標からの反射信号を検出可能なレーダ装置の一例として、準天頂衛星システムを介して、近隣に存在する他のレーダ装置との間で位置情報を送受信するレーダ装置について説明する。なお、本発明にかかるレーダ装置は、飛行機,艦船,自動車等、どのような移動体に対しても搭載可能である。
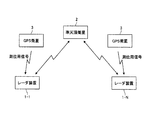
図1は、本発明にかかるレーダ装置を含む衛星通信システムの構成を示す図であり、このシステムは、レーダ装置1−1〜1−N(Nは2以上の整数)と、準天頂衛星2と、GPS(Global Positioning System)衛星3と、から構成されている。ここでは、レーダ装置が、一例として、GPS受信機を備え、GPS衛星3を用いて自レーダ装置の正確な位置を測定する場合について記載している。なお、本実施の形態では、GPS衛星3を用いて自レーダ装置の位置を測定しているが、これに限らず、GPS以外の方法、たとえば、INS(慣性航法装置:Inertial Navigation System)等により自レーダ装置の位置を測定することとしてもよい。
なお、上記準天頂衛星システムは、3機の準天頂衛星2が所定の軌道を通って1日で地球を一周し、3機の準天頂衛星2の少なくとも1機が常に日本の上空(天頂)付近に存在する地域限定型の衛星システムである。また、準天頂衛星2の切り換えを8時間毎に行えば、日本各地において常に60度以上の仰角が確保され、ユーザは、常に、ビル等による通信回線の遮断が少ない良好な移動体通信サービス(自動車電話サービス、携帯電話サービス、GPSとは別の簡易測位システム等)の提供を受けられる。具体的には、日本の主要地域から見た場合は常に天頂から20度以内に準天頂衛星2が存在するため、たとえば、移動体のアンテナを天頂方向に向けておくだけで、移動体の進行方向、飛行体の場合はバンク角が変化しても、常に良好な通信が可能となり、さらに衛星追尾が不要となるため通信装置を簡略化することができる。
また、上記レーダ装置(1−1〜1−N)に搭載されるGPS受信機は、4機のGPS衛星3からの電波(測位用信号)を受信することによって各GPS衛星3までの距離を個別に測定し、これらの4つの測定結果から3次元での自レーダ装置の位置を求める。GPS衛星3からの距離は、GPS衛星3が電波を送信して(送信時刻)からGPS受信機に届くまでの時間(受信時刻)に基づいて測定する。なお、GPS衛星3には高精度な原子時計が搭載されているため、GPS衛星3からの測位用信号を受信することにより、各GPS衛星3と同程度の精度の時刻情報を共有することができる。なお、準天頂衛星2からも、GPS衛星3と同様の測位用信号が送信されているため、GPS衛星4機の内の1機を準天頂衛星2としても良い。
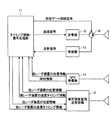
図2は、本発明にかかるレーダ装置の構成を示す図であり、このレーダ装置は、受信ゲート(送受切替管)を制御する送受信タイミング制御機能と、近隣に存在する他のレーダ装置との相対距離および目標(ターゲット)までの距離等を算出する信号処理機能と、を有するタイミング制御/信号処理部11と、測距用の電波を送信する送信機12と、目標からの反射信号を受信する受信機13と、GPS衛星3からの測位用信号に基づいて位置情報を生成するGPS受信機14と、準天頂衛星2との間で必要な情報を送受信する準天頂衛星用送受信機15と、タイミング制御/信号処理部11からの制御で送信/受信動作の切り替えを行う受信ゲート16と、を備えている。なお、上記受信ゲート16は、たとえば、送信/受信をそれぞれ切り離して動作させることを目的とした、導波管の一部に挿入して使用する放電管の一種であるTR管およびATR管である。一般に、レーダ装置は、導波管のT分岐を通して送信機と受信機が接続されているが、上記受信ゲート16により、たとえば、送信時の大きなパルス電力による受信機の損傷を防止することができる。
また、図3は、上記タイミング制御/信号処理部11の詳細構成を示す図であり、このタイミング制御/信号処理部11は、近隣に存在する他のレーダ装置との相対距離を算出する相対距離算出部21と、パルス信号の送信を制御する送信タイミング制御部22と、受信ゲートの送信/受信動作の切り替えを制御する受信タイミング制御部23と、目標との距離を算出する目標距離算出部24と、を備えている。
ここで、上記のように構成される本発明にかかるレーダ装置の動作を、図面にしたがって説明する。なお、ここでは、一例として、GPS受信機14が、上記で説明したように、近隣に存在するレーダ装置間で共通の時刻情報を生成し、各レーダ装置間で同期が確立されていることとする。なお、上記共通の時刻情報については、これに限らず、通信総合研究所が福島と九州から60KHzおよび40KHzで送信している標準電波でも得ることができる。また、本実施の形態では、図1に示すように、N個のレーダ装置が、準天頂衛星2を介した通信により、他のレーダ装置の位置情報を受信する場合を想定しているが、ここでは、説明の便宜上、レーダ装置1−1の動作について説明する。他のレーダ装置についてはレーダ装置1−1と同様の動作を行う。
まず、GPS受信機14では、自受信機の時刻情報と、GPS衛星3から送られてくる測位用信号(送信時刻を含む)と、に基づいて、自レーダ装置1−1の位置情報を生成する。そして、その位置情報を相対距離算出部21に通知する。同時に、生成した自レーダ装置1−1の位置情報を、準天頂衛星用送受信機15,準天頂衛星2経由で、近隣に存在する他のすべてのレーダ装置に対して送信する。なお、本実施の形態においては、たとえば、DGPS(Differential GPS)の補正信号を利用した高精度測位を想定することとしてもよい(図示せず)。高精度測位を想定する場合は、たとえば、GPS受信機14のアンテナで準天頂衛星2からの航法メッセージを受信し、航法メッセージに付加された補正情報に基づいて、上記で求めた自レーダ装置1−1の位置の誤差を補正し、高精度な自レーダ装置1−1の位置を算出することになる。なお、準天頂衛星2から送られてくる航法メッセージは、GPS受信機14のアンテナ(指向性が鋭くない小型のアンテナ)にて受信可能であり、GPS受信機14では、航法メッセージのIDを確認しなければ、GPS衛星3からの信号か、準天頂衛星2からの信号か、を区別することができない。
一方で、準天頂衛星用送受信機15では、準天頂衛星2経由で、近隣に存在する他のすべてのレーダ装置からの位置情報を受信し、それらの位置情報を相対距離算出部21に通知する。
相対距離算出部21では、自レーダ装置1−1の位置情報および上記で受信した近隣に存在する各レーダ装置の位置情報に基づいて、各レーダ装置との相対距離を個別に算出する。そして、求めた他のすべてのレーダ装置との相対距離を受信タイミング制御部23および目標距離算出部24に通知する。なお、相対位置とは、自レーダ装置1−1の位置を(X1,Y1,Z1)とし、近隣に存在する他のレーダ装置の位置を、たとえば、(Xn,Yn,Zn)とした場合(nは2〜Nのいずれか1つで、2〜Nはそれぞれレーダ装置1−2,…1−Nに対応する)、(X1−Xn,Y1−Yn,Z1−Zn)で表すことができる。つまり、自レーダ装置1−1と、各レーダ装置との相対距離lnは、((X1−Xn)2+(Y1−Yn)2+(Z1−Zn)2)1/2で示せる。
送信タイミング制御部22では、上記GPS受信機14から得られる時刻情報に基づいてパルス信号の送信開始時刻および送信間隔を任意に設定し、設定した送信開始時刻および送信間隔を送信タイミング情報として、準天頂衛星用送受信機15,準天頂衛星2経由で、近隣に存在するすべてのレーダ装置に対して送信する。同時に、上記送信タイミング情報を受信タイミング制御部23および目標距離算出部24に通知する。これにより、すべてのレーダ装置間でレーダ装置1−1の送信タイミング情報を共有することができる。その後、送信タイミング制御部22では、上記時刻情報が送信開始時刻に達した場合、さらには、送信間隔毎に、所定のパルス信号を送信する。
受信タイミング制御部23では、上記GPS受信機14から得られる時刻情報および送信タイミング制御部22から通知される送信タイミング情報に基づいて、自レーダ装置1−1のパルス信号の送信開始時刻および送信間隔毎に、受信ゲート16を「送信(OFF)」に設定するための受信ゲート制御信号を生成し、それらの間の受信信号を通過させないように制御する(ブランク動作)。
また、受信タイミング制御部23では、他のすべてのレーダ装置から準天頂衛星2,準天頂衛星用送受信機15経由で通知される送信タイミング情報(送信開始時刻,送信間隔)および相対処理算出部21から通知される他のすべてのレーダ装置との相対距離に基づいて、他のすべてのレーダ装置が出力するパルス信号の受信時刻を計算し、当該受信時刻で受信ゲートを「OFF」に設定するための受信ゲート制御信号を生成し、その間の受信信号を通過させないように制御する(ブランク動作)。たとえば、レーダ装置1−nがパルス信号を送信し、そのパルス信号の受信時刻をtRとし、レーダ装置1−nの送信時刻をtTとし、レーダ装置1−nとの相対距離をlとし、光速をcとした場合、上記受信時刻は、「tR=tT+(l÷c)」を演算することにより求められる。なお、上記送信時刻tTは、送信開始時刻tT1、および送信間隔により求められる時刻tT2,tT3,tT4,…のことをいう。ただし、上記ブランク動作の時間帯以外については、受信ゲートを「受信(ON:受信信号通過)」に設定するための受信ゲート制御信号を生成する。
目標距離算出部24では、受信機13にて受信した自レーダ装置1−1が送信したパルス信号に対する反射信号を受け取り、送信タイミング制御部22から通知される送信タイミング情報(送信開始時刻,送信間隔)および反射信号の受信時刻に基づいて、目標との距離を算出する。たとえば、目標との距離をlTとし、パルス信号を送信してから反射信号を受信するまでの時間をtTRとし、光速をcとした場合、上記目標との距離は、「lT=tTR×c÷2」を演算することにより求められる。
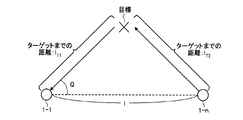
さらに、本実施の形態では、目標距離算出部24が、たとえば、自レーダ装置1−1以外の他のレーダ装置1−n(1−nは1−2〜1−Nのうちのいずれか一つ)が送信したパルス信号に対する反射信号を受け取り、さらに、レーダ装置1−nから準天頂衛星2,準天頂衛星用送受信機15経由で通知される送信タイミング情報(送信開始時刻,送信間隔),相対距離算出部21から得られるレーダ装置1−nとの相対距離,および当該反射信号の受信時刻に基づいて、目標との距離を算出することも可能である。図4は、レーダ装置1−nが送信したパルス信号に対する反射信号をレーダ装置1−1が受信した場合の、レーダ装置1−1による目標までの距離の計算方法を示す図である。たとえば、レーダ装置1−1から目標までの距離をlT1とし、レーダ装置1−nから目標までの距離をlT2とし、レーダ装置1−nがパルス信号を送信してから(送信時刻:tT)レーダ装置1−1が反射信号を受信する(受信時刻:tR)までの時間をtTR(=tT−tR)とし、光速をcとした場合、目標を経由したレーダ装置間の距離lT1+lT2は、
lT1+lT2=tTR×c …(1)
と表すことができる。また、レーダ装置1−1とレーダ装置1−nとを結ぶ直線を基準とした反射電波方向をθとし、上記相対距離算出部21から得られるレーダ装置1−nとの相対距離をlとした場合、
lT1 2+l2−2lT1×l×cosθ=lT2 2 …(2)
が成立する。したがって、目標距離算出部24では、(1)式,(2)式に基づいてレーダ装置1−1から目標までの距離をlT1を算出する。これにより、各レーダ装置が送信するパルス信号を低減できるので、送信パルス信号と反射信号が干渉を起こす確率を低減できる。さらに、秘匿性を向上させることができる。
lT1+lT2=tTR×c …(1)
と表すことができる。また、レーダ装置1−1とレーダ装置1−nとを結ぶ直線を基準とした反射電波方向をθとし、上記相対距離算出部21から得られるレーダ装置1−nとの相対距離をlとした場合、
lT1 2+l2−2lT1×l×cosθ=lT2 2 …(2)
が成立する。したがって、目標距離算出部24では、(1)式,(2)式に基づいてレーダ装置1−1から目標までの距離をlT1を算出する。これにより、各レーダ装置が送信するパルス信号を低減できるので、送信パルス信号と反射信号が干渉を起こす確率を低減できる。さらに、秘匿性を向上させることができる。
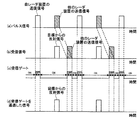
図5は、たとえば、上記のように動作するレーダ装置1−1の特徴的な処理の一例を示す図であり、パルス信号を送信する例を示すが、何らかの変調を掛けても同じである。(a)の処理では、レーダ装置1−1が定期的に特定のパルス幅のパルス信号を送信している様子の一例、および他のレーダ装置1−nが定期的に特定のパルス幅でパルス信号を送信している様子の一例、を表している。なお、ここでは、説明の便宜上、パルス信号を送信している他のレーダ装置が1つの場合を記載しているが、これに限らず、通常は、複数のレーダ装置がパルス信号を送信している。(b)は、レーダ装置1−1が送信したパルス信号に対する目標からの反射信号の受信タイミング、および他のレーダ装置が送信するパルス信号の受信タイミングを表している。他のレーダ装置の送信信号は、上記受信タイミング制御部23にて計算した、他のレーダ装置が送信したパルス信号の受信時刻に到着する。上記(c)では、レーダ装置1−1が送信するパルス信号の送信時刻で受信ゲートをOFF(受信信号を通過させない設定)に設定する処理と、他のレーダ装置が出力するパルス信号の受信時刻で受信ゲートをOFF(受信信号を通過させない設定)に設定する処理、を表している。ここでは、受信パルス信号のパルス幅に応じた受信ゲート制御信号を生成している。(d)では、受信ゲートを通過した信号を表している。すなわち、ここでは、レーダ装置1−1が送信したパルス信号に対する目標からの反射信号のみが受信ゲートを通過している様子、を表している。
上記の処理によって、レーダ装置1−1では、(b)に示すように、受信信号として、自レーダ装置1−1が送信したパルス信号に対する反射信号と、他のレーダ装置1−nから送られてくるパルス信号と、が共存しているが、(c)に示すように、他のレーダ装置1−nが送信するパルス信号の受信時刻で受信ゲートを「OFF」にしているので、結果として、(d)に示すように、他のレーダ装置1−nが送信するパルス信号を通過させずに、自レーダ装置1−1が送信したパルス信号に対する反射信号のみを通過させることが可能となる。
このように、本実施の形態においては、GPS衛星および準天頂衛星を利用して、近隣に存在するレーダ装置の正確な位置を把握し、近隣に存在するレーダ装置が送信するパルス信号の受信時刻(受信タイミング)を特定可能な構成とした。さらに、自レーダ装置が送信したパルス信号に対する反射信号と、近隣に存在するレーダ装置が送信するパルス信号と、が受信タイミングにおいて共存する場合であっても、他のレーダ装置が送信するパルス信号の受信時刻で受信ゲートをOFFに設定し、他のレーダ装置が送信するパルス信号を通過させない構成とした。これにより、確実に、自レーダ装置が送信したパルス信号に対応する反射信号を検出できる。
なお、本実施の形態においては、特に準天頂衛星を利用した場合について説明したが、これに限らず、たとえば、アンテナを天頂方向に向けておくだけで常に良好な通信が可能となるような位置に存在する衛星であれば、準天頂衛星以外であっても同様の効果を得ることができる。
また、本実施の形態においては、送信タイミング制御部22によるパルス信号の送信時刻を特定していない(任意に設定可能)が、一例として、受信ゲートが「OFF」であることを利用して、他のレーダ装置が出力するパルス信号の受信時刻にあわせてパルス信号を送信することとしてもよい。
以上のように、本発明にかかるレーダ装置は、一例として、自動車、航空機等の飛翔体、艦船等に搭載されるレーダ装置として有用であり、特に、他のレーダ装置の位置情報を利用してターゲットを検出するレーダ装置として適している。
1−1〜1−N レーダ装置
2 準天頂衛星
3 GPS衛星
11 タイミング制御/信号処理部
12 送信機
13 受信機
14 GPS受信機
15 準天頂衛星用送受信機
16 受信ゲート
21 相対距離算出部
22 送信タイミング制御部
23 受信タイミング制御部
24 目標距離算出部
2 準天頂衛星
3 GPS衛星
11 タイミング制御/信号処理部
12 送信機
13 受信機
14 GPS受信機
15 準天頂衛星用送受信機
16 受信ゲート
21 相対距離算出部
22 送信タイミング制御部
23 受信タイミング制御部
24 目標距離算出部
Claims (4)
- 送信パルス信号に対する反射信号から目標の距離を検出するレーダ装置において、
自レーダ装置の位置情報、および所定の伝送路を介して通知される近隣に存在する他のレーダ装置の位置情報、に基づいて、前記他のレーダ装置との相対距離を算出する相対距離算出手段と、
自レーダ装置が送信するパルス信号の送信開始時刻および送信間隔を、前記所定の伝送路を介して前記他のレーダ装置に対して送信し、その後、前記送信開始時刻および前記送信間隔から得られる送信時刻に達した段階でパルス信号を送信する送信タイミング制御手段と、
前記パルス信号の送信時間帯において受信信号を通過させないように制御し、また、前記他のレーダ装置から前記所定の伝送路を介して通知されるパルス信号の送信開始時刻および送信間隔と、前記他のレーダ装置との相対距離と、に基づいて、前記他のレーダ装置が出力するパルス信号の受信時刻を算出し、当該パルス信号の受信時間帯において受信信号を通過させないように制御し、一方で、その他の時間帯において受信信号を通過させる受信タイミング制御手段と、
自レーダ装置が送信したパルス信号に対する反射信号を受け取り、自レーダ装置が送信したパルス信号の送信時刻および当該反射信号の受信時刻に基づいて目標との距離を算出する目標距離算出手段と、
を備えることを特徴とするレーダ装置。 - 前記目標距離算出手段は、前記他のレーダ装置が送信したパルス信号に対する反射信号を受け取り、前記他のレーダ装置から前記所定の伝送路を介して通知されるパルス信号の送信開始時刻および送信間隔と、前記他のレーダ装置との相対距離と、当該反射信号の受信時刻と、に基づいて、目標との距離を算出することを特徴とする請求項1に記載のレーダ装置。
- 前記自レーダ装置の位置情報を、GPS(Global Positioning System)における測位用信号に基づいて生成することを特徴とする請求項1または2に記載のレーダ装置。
- 前記所定の伝送路として、準天頂衛星を介してレーダ装置間の通信を行うことを特徴とする請求項1、2または3に記載のレーダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004104515A JP2005291806A (ja) | 2004-03-31 | 2004-03-31 | レーダ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004104515A JP2005291806A (ja) | 2004-03-31 | 2004-03-31 | レーダ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291806A true JP2005291806A (ja) | 2005-10-20 |
Family
ID=35324912
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004104515A Pending JP2005291806A (ja) | 2004-03-31 | 2004-03-31 | レーダ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005291806A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008241429A (ja) * | 2007-03-27 | 2008-10-09 | Mitsubishi Electric Corp | 移動体情報共有システム |
| WO2012066737A1 (ja) * | 2010-11-16 | 2012-05-24 | パナソニック株式会社 | レーダ装置 |
| JP2012221206A (ja) * | 2011-04-08 | 2012-11-12 | Nec Corp | 衛星によるデータ収集システム |
| US10769239B2 (en) | 2014-11-26 | 2020-09-08 | Maritime Radar Systems Limited | System for monitoring a maritime environment |
| JP2022006248A (ja) * | 2020-06-24 | 2022-01-13 | 株式会社エヌエステイー | 距離計測装置及びこれを用いる距離計測方法 |
| KR102904454B1 (ko) * | 2025-03-10 | 2025-12-26 | 국방과학연구소 | 레이다의 정렬 상태 보정 방법 및 이를 위한 전자 장치 |
-
2004
- 2004-03-31 JP JP2004104515A patent/JP2005291806A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008241429A (ja) * | 2007-03-27 | 2008-10-09 | Mitsubishi Electric Corp | 移動体情報共有システム |
| WO2012066737A1 (ja) * | 2010-11-16 | 2012-05-24 | パナソニック株式会社 | レーダ装置 |
| JP2012107947A (ja) * | 2010-11-16 | 2012-06-07 | Panasonic Corp | レーダ装置 |
| US9664777B2 (en) | 2010-11-16 | 2017-05-30 | Panasonic Intellectual Property Management Co., Ltd. | Radar device |
| JP2012221206A (ja) * | 2011-04-08 | 2012-11-12 | Nec Corp | 衛星によるデータ収集システム |
| US10769239B2 (en) | 2014-11-26 | 2020-09-08 | Maritime Radar Systems Limited | System for monitoring a maritime environment |
| JP2022006248A (ja) * | 2020-06-24 | 2022-01-13 | 株式会社エヌエステイー | 距離計測装置及びこれを用いる距離計測方法 |
| KR102904454B1 (ko) * | 2025-03-10 | 2025-12-26 | 국방과학연구소 | 레이다의 정렬 상태 보정 방법 및 이를 위한 전자 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11921184B2 (en) | Methods and apparatus for characterising the environment of a user platform | |
| CN1689191B (zh) | 一种在时分多址(tdma)定位网络中抑制多径及提高信噪比的系统和方法 | |
| EP2523019B1 (en) | Global positioning system signal reception with increased resistance to interference | |
| US20100090882A1 (en) | Bi-static radar processing for ads-b sensors | |
| RU2365939C1 (ru) | Способ навигации подводного объекта | |
| JPH083522B2 (ja) | 衛星を用いる航行方法 | |
| AU774161B2 (en) | Improvements in or relating to object location | |
| KR20030041128A (ko) | 항공기의 밀집된 환경용 디지털 수신 시스템 | |
| JP5669168B2 (ja) | 距離計測システム及び距離計測方法 | |
| CN101156077A (zh) | 具有稀疏天线阵列的定位系统 | |
| EP1910860B1 (en) | A positioning system and method | |
| JP3613120B2 (ja) | バイスタティックレーダ装置 | |
| US11719782B2 (en) | One-way time-of-flight localization using sonic and electromagnetic signals for mobile ad hoc networks | |
| JP2005291806A (ja) | レーダ装置 | |
| KR20100064287A (ko) | 충돌 방지 장치 및 충돌 방지 방법 | |
| JP3753121B2 (ja) | レーダ装置およびレーダシステム | |
| JP2010256133A (ja) | 干渉防止レーダ装置 | |
| CA2741844C (en) | System for positioning a geostationary satellite | |
| KR20190140328A (ko) | 이동 타겟을 검출하는 전자 스캐너 | |
| CN119213329A (zh) | 用于改进独立无线电系统的同信道操作的方法和装置 | |
| RU2854085C1 (ru) | Способ пеленгации двух радиомаяков | |
| EP1924029A1 (en) | Method for controlling beam-forming at a base station, and a base station | |
| JP2007147534A (ja) | レーダ装置 | |
| JP2647054B2 (ja) | 精測進入レーダーシステム | |
| JP6012235B2 (ja) | 干渉制御装置 |