JP2005291083A - タービン加速度表示手動起動装置、及びその手動起動方法 - Google Patents
タービン加速度表示手動起動装置、及びその手動起動方法 Download PDFInfo
- Publication number
- JP2005291083A JP2005291083A JP2004106810A JP2004106810A JP2005291083A JP 2005291083 A JP2005291083 A JP 2005291083A JP 2004106810 A JP2004106810 A JP 2004106810A JP 2004106810 A JP2004106810 A JP 2004106810A JP 2005291083 A JP2005291083 A JP 2005291083A
- Authority
- JP
- Japan
- Prior art keywords
- turbine
- acceleration
- rotational speed
- schedule
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Control Of Turbines (AREA)
Abstract
【課題】タービンの手動起動において、タービンの回転数の制御をより容易に行うための加速度表示手動起動装置及び方法を提供する。
【解決手段】回転センサ17bの回転信号を受けて、タービンを自動制御起動するTSC制御手段11と、TSC動制御手段の自動制御出力を停止し、監視操作盤手段15から起動を手動操作により行う切換手段と、切換手段の作動後にタービン実回転速度を算出し、設定された起動運転プランのスケジュール回転速度及びスケジュール加速度を読込み、これ等を比較、判定し、その結果に基づいて手動により設定すべき目標加速度を監視操作盤手段へ出力するTMS起動制御手段12と、目標加速度と、タービンの現況の加速度とを対比して表示する指示計手段14と、この指示計手段を監視する運転員が、タービンに注入する蒸気量或いはガス量を遠隔手動で操作するスイッチ手段16とからなるタービン加速度表示手動起動装置。
【選択図】図1
【解決手段】回転センサ17bの回転信号を受けて、タービンを自動制御起動するTSC制御手段11と、TSC動制御手段の自動制御出力を停止し、監視操作盤手段15から起動を手動操作により行う切換手段と、切換手段の作動後にタービン実回転速度を算出し、設定された起動運転プランのスケジュール回転速度及びスケジュール加速度を読込み、これ等を比較、判定し、その結果に基づいて手動により設定すべき目標加速度を監視操作盤手段へ出力するTMS起動制御手段12と、目標加速度と、タービンの現況の加速度とを対比して表示する指示計手段14と、この指示計手段を監視する運転員が、タービンに注入する蒸気量或いはガス量を遠隔手動で操作するスイッチ手段16とからなるタービン加速度表示手動起動装置。
【選択図】図1
Description
本発明は、プロセス制御用計算機システムによるタービンの運転に関し、特にタービンの自動起動制御が不調時に、運転員が行う手動による起動運転を支援する運転加速度表示システムに関する。
プラントなどを制御するプロセス制御用計算機システムにおいて、タービンの起動制御には、TSM(Turbine Start up Monitor)モードと呼ばれるタービン起動監視モードと、TSC(Turbine Start up Controller)モードと呼ばれるタービン起動制御モードがある。
通常のタービンの起動では、プロセス制御用計算機システムの専用制御装置であるTSC制御装置により、TSCモードで自動制御が行われて起動される。このTSCモードによる起動では、タービンの作動状況が逐次検出されて、シーケンス/フィードバックが行われる。これにより、所定の定格運転状態まで、例えば発電プラントのタービンに供給される蒸気のバルブの開閉が自動調整される。この自動調整により、タービンの回転数は所定のパターンで徐々に上昇して、定常の定格運転に移行する。
一方、このTSC制御の不調時、或いは何等かの原因によるプロセス制御用計算機システムの部分的な不調時には、TMSモードに切換えられて、監視操作盤の計器やモニタの表示或いは指示の内容を判断して、運転員が運転ハンドルまたはスイッチの操作、或いは設定データ入力などを行って手動操作による起動が行われる。しかし、この不調時には、タービンの運転状況に関して、タービンに取り付けられた回転センサにより検知されたタービン回転速度(回転数)、及びこの回転速度がTSC制御装置で処理されて、現状の加速度に対し、所定のタービン回転速度を得るための、自動制御におけるその増減指示である加速度指令値が、TSC制御装置から出力され、指示計には加速度の現況が表示されるのみである。
TSMモードによるタービンの起動を行うときには、起動回転速度(回転数)パターン、すなわち所定のタイムスケジュールで、ラブチェック(回転翼接触などの異常チェック)、定速保持(タービン熱応力除去の回転速度保持)などのタービン回転速度の制御シーケンスを、タービンの運転の安全及び安定ために実行する必要がある。タイムスケジュールに沿った正確な起動運転を行うためには、従来のプロセス制御システムの指示計に表示される回転速度、或いは加速度指令の結果の加速度値では、手動操作による制御が困難であるという問題があった。
特に昇速中(回転数上昇中)の加速度(昇速率)の過度の設定はタービン損傷、破壊に繋がり、適切な回転速度になる操作、運転が安全かつ安定なタービンの運転に重要な制御対象である。しかし、運転員の行う操作は、タービンへの例えば蒸気量を制御するバルブの開閉操作であり、このバルブの開閉によりタービン回転の加速度が変化し、この加速度の積分値が回転数の上昇となる。したがって、運転員の手動操作によるタービン運転、制御には、目標加速度値の表示・周知が、不可欠である。
本発明は上記のような従来の問題点に鑑みてなされたもので、タービン起動時における運転員による手動操作の昇速のために、タービン運転の目標加速度を指示計に出力し、タービンの回転数の制御をより容易に行うことのできるTSMモード加速度指示を出力するタービン加速度表示手動起動装置、及びその方法を提供することを目的とする。
本発明のタービン加速度表示手動起動装置は、タービンの運転を行うプロセス制御装置に備えられ、前記タービンからの回転作動信号を受けて、前記タービンの起動を自動制御するタービン起動自動制御手段と、前記タービンの作動状況を表示し、前記プロセス制御装置を操作する監視操作盤手段と、このタービン起動自動制御手段の自動制御出力を停止し、前記監視操作盤手段から前記タービンの起動を手動操作により行う切換手段と、前記手動操作に切換えた起動を行う場合に、タービンの起動開始後の各ステップにおける回転速度及び加速度を起動運転プランとして、前記タービンの状況に基づき作成、設定する起動スケジュールサーバ手段と、前記切換手段の作動後に、前記タービン或いは前記タービン起動自動制御手段からの回転作動信号により実回転速度を算出し、設定された前記起動運転プランのスケジュール回転速度及びスケジュール加速度を読込み、起動開始後の各ステップにおいてこれ等を比較、判定し、その結果に基づいて手動により設定すべき目標加速度として、これを前記監視操作盤手段へ出力するタービン手動起動制御手段と、このタービン手動起動制御手段から出力された前記目標加速度と、前記タービンの現況の加速度とを対比して表示する前記監視操作盤手段に備えた指示計手段と、この指示計手段を監視する運転員が、前記タービンに注入する蒸気量或いはガス量を遠隔手動で操作するスイッチ手段とからなることを特徴とするものである。
さらに、タービン加速度表示手動起動装置の起動スケジュールサーバ手段が作成、設定する起動運転プランは、前記タービンの温度、負荷(予定出力)、注入する蒸気或いはガスの温度及び圧力に基づき、ラブチェック(異常チェック)及び1回以上の定速保持(熱応力除去)を含む昇速プランであることを特徴とするものである。
さらに、タービン加速度表示手動起動装置のタービン手動起動制御手段が出力する目標加速度は、加速度指示の計算タイミングで無い場合、及びタービンの回転が停止している場合、及びタービンの回転数保持中の場合、及びタービンの実回転速度が前記起動運転プランに設定している目標回転速度との所定の許容差範囲を越えて大きい場合には、加速度0rpm2であり、タービンの実回転速度が前記起動運転プランに設定しているスケジュール回転速度との所定の許容差範囲内の場合、及び所定の許容差範囲外で、所定の演算式により算出した加速度値が前記スケジュール加速度より小さい場合には、前記起動運転プランに設定しているスケジュール加速度値であり、前記所定の許容差範囲外で、所定の演算式により算出した加速度値が前記スケジュール加速度より大きい場合には、前記算出した加速度値あり、前記ラブチェック中の場合で、バルブが全閉され、所定のタービン回転速度に達したブレークポイント経過後では、所定の負の加速度値であることを特徴とするものである。
また、本発明のタービン加速度表示手動起動方法は、タービンの運転を行うプロセス制御装置に備えられ、前記タービンからの回転作動信号を受けて、前記タービンの起動を自動制御するタービン起動自動制御手段の作動/非作動を選択するモード選択ステップと、このモード選択ステップで作動を選択した場合に、前記タービン起動自動制御手段による前記タービンの自動制御起動を行う自動制御起動ステップと、前記モード選択ステップで非作動を選択した場合に、前記タービンを手動操作起動するため、前記タービンの状況に基づき、ラブチェック(異常チェック)及び1回以上の定速保持(熱応力除去)を含む、回転速度及び加速度の起動運転プランを作成、設定する起動スケジュール設定ステップと、作成、設定された前記起動運転プランの回転速度及び加速度を読込んで前記タービンの起動を開始するタービン起動開始ステップと、起動開始後の前記タービンの実回転速度をタービンに設けた回転センサからの回転信号により算出する実回転速度計測ステップと、この実回転速度計測ステップで得た実回転速度と、読込んだ前記起動運転プランのスケジュール回転速度及びスケジュール加速度とを比較、判定し、回転速度保持の加速度ゼロ、及びラブチェックの負の加速度を含む前記起動運転プランに予め設定されたスケジュール加速度、或いは前記実回転速度と前記スケジュール回転速度との差による所定の演算式で
算出した加速度のいずれかを指示加速度として設定する加速度指示ステップと、この加速度指示ステップで設定した指示加速度を目標加速度とし、前記実回転速度から算出した実加速度とし、これらの加速度を前記プロセス制御装置の監視操作盤手段の指示計に共に表示する指示計表示ステップとからなることを特徴とし、この指示計の表示を監視する運動員が、前記タービンの蒸気或いはガスの注入バルブの開閉操作を手動で行いタービンの起動する方法である。
算出した加速度のいずれかを指示加速度として設定する加速度指示ステップと、この加速度指示ステップで設定した指示加速度を目標加速度とし、前記実回転速度から算出した実加速度とし、これらの加速度を前記プロセス制御装置の監視操作盤手段の指示計に共に表示する指示計表示ステップとからなることを特徴とし、この指示計の表示を監視する運動員が、前記タービンの蒸気或いはガスの注入バルブの開閉操作を手動で行いタービンの起動する方法である。
さらに、タービン加速度表示手動起動方法の前記加速度指示ステップは、加速度指示の計算タイミングで無い場合、及びタービンの回転が停止している場合、及びタービンの回転数保持中の場合、及びタービンの実回転速度が前記起動運転プランに設定している目標回転速度との所定の許容差範囲を越えて大きい場合には、加速度を0rpm2とするゼロ加速度指示ステップと、タービンの実回転速度が前記起動運転プランに設定しているスケジュール回転速度との所定の許容差範囲内の場合、及び所定の許容差範囲外で、所定の演算式により算出した加速度値が前記スケジュール加速度より小さい場合には、加速度を前記起動運転プランに設定しているスケジュール加速度値とするスケジュール加速度指示ステップと、前記所定の許容差範囲外で、所定の演算式により算出した加速度値が前記スケジュール加速度より大きい場合には、加速度を前記算出した加速度値とする算出加速度指示ステップと、前記ラブチェック中の場合で、バルブが全閉され、所定のタービン回転速度に達したブレークポイント経過後では、加速度を所定の負の加速度値とする減速加速度指示ステップとが含まれてなることを特徴とする手動で起動する方法である。
本発明のタービン手動起動運転加速度表示装置、及びその方法は、プロセス制御計算機システムで運転が行われるプラントのタービン起動において、タービン起動監視(TMS)モードによる手動起動が行われる場合に、適切な加速度指示を指示計に表示できるための、運転員の手動操作が、煩雑でなく容易に行なえ、タービンの起動時の状況に対応して設定される起動スケジュールに沿った、安全でかつ安定なタービンの起動が実施できる効果がある。
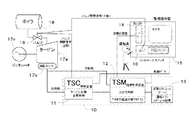
図1は、本発明のタービン加速度表示手動起動装置の一実施形態を示す構成ブロック図で、例えば、発電プラントにおける蒸気タービンを起動する例である。
図1に示す発電プラントの概略の構成は、タービン手動起動運転・加速度表示装置を含むこのプラントの制御を行うプロセス制御装置10と、プラントの入出力の表示及び操作を行う監視操作盤15と、ボイラ18からの蒸気により制御対象のタービン17aが駆動されて、発電を行う蒸気タービン発電機17とからなる。
さらに構成の詳細は、このプロセス制御装置10が、自動制御によりタービン起動を行うTSC制御装置11と、運転員の手動操作によるタービン起動を支援、制御するTSM起動装置12と、このTSM起動装置12に接続されて起動時の運転スケジュールを計算、設定する自動化サーバ13と、図示していない通常の運転の制御を行うタービン自動制御装置(プロセス制御コンピュータ)とから構成される。また、監視操作盤15には、加速度表示計14或いはタービン回転数表示計などのプロセス運転状況を表示する計器、プロセスの進行状況やプロセス装置の運転状況全容を表示するモニター装置、及び操作を入力するコントロールスイッチ16やキーボードなどを備えている。
一方、制御や操作の対象となる蒸気タービン発電機17には、ボイラ18からの蒸気が、バルブ19を経由してタービン17aに供給され、回転軸を共にする発電機17cが回転し、発電が行われる。タービン17aには、回転センサ17bが備えられてタービンの作動状況がプロセス制御装置に入力される。なお、バルブ19は、プロセス制御装置10或いは監視操作盤15により、開閉の操作が行われて、タービンの運転状態を制御調整する。
本実施形態における作用、動作を、以下に図を用いて説明する。
本実施形態における所謂プロセス制御コンピュータ(図示せず)による自動制御起動では、TSC制御装置11が、タービン17aの回転センサ17bから入力される回転数信号により、回転速度(昇速)を計算し、加速度指令値を指示する。この加速度指令値に基づくバルブ19の開閉が行われて、ラブチェックを含む数段階に設定される回転速度の所定パターンを経て、タービン17aの定格回転数を保持する状態まで、起動運転がなされる。なお、このタービン17aを含むプラントの起動の状況は、タービン回転速度、加速度の現在値などが監視操作盤15に表示され、運転員が監視することができる。
次に、運転員の手動操作によるタービン起動における本実施形態の作用、動作について、図2乃至4を用いて説明する。
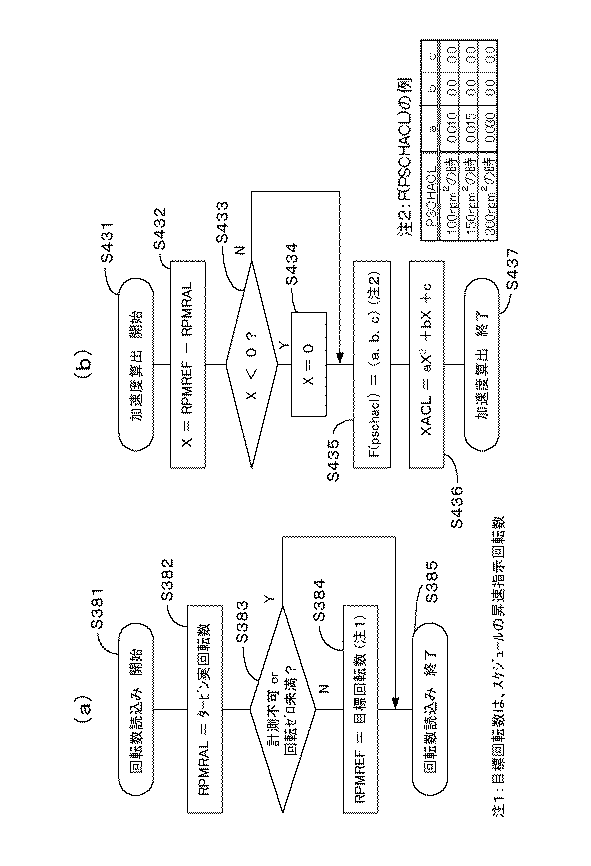
図2は、自動化サーバ13において算出されたTMSによる起動時のタービン起動運転プラン(回転速度スケジュール)の例を図示したものである。図3は、本実施形態のTSM起動制御装置12において実行されるTMS加速度計算プログラムによる目標加速度算出、表示のフロー図である。図4は、図3に示すフローにおけるタービン回転数サブルーチン及び加速度算出サブルーチンのフロー図である。
本実施形態の図1に示す例えば発電プラントにおける、運転員の手動によるタービン17aの起動は、図3に示すフローに従って、先ずステップS31の監視操作盤15の電源をオンとする。これにより、このプラントにおけるプロセス制御の対象となる各装置及び機器を作動可能状態にする。
ここで、例えば、自動制御によるタービンの起動を望む場合は、監視操作盤15においてTSCモードの設定がされて、ステップS32の判定によりステップS33へ進む。ステップS33では、TSC制御装置11が正常であれば、回転センサ17b及びプロセス制御用コンピュータ(図示せず)とデータが取り交わされて、加速度指令値が出力されて、これに対応するバルブ19の開閉が行われる。さらにステップS34で、TSC制御装置11により計測されたタービン作動中の加速度が、加速度指示値(XACL)として設定されて、これをステップS48により監視操作盤15の加速度指示計14に目標加速度値として表示する。
次に、例えば、TSC制御装置の不調時、或いはメンテナンス後などのステップバイステップで行う試験運転等の場合に、運転員が手動でタービンを起動する場合は、監視操作盤15においてTSMモードの選択がなされる。この場合には、ステップS32で、ステップS35の「TSMモードによる手動起動が開始」に進む。
ステップS35に進められた本プロセスは、次のステップS36において、TSMモードによる起動運転を開始して良いかを判定する。すなわち、表1の「S36」に示す判定事項「指示加速度計算開始タイミング」の4つの判定信号事項をチェックする。この4つの判定信号は、TSCモード運転とTSMモード運転を並列運転する設定でないこと、TSMモードが設定されていること、自動化サーバ13により、タービンの諸状況を踏まえたタービン起動運転プラン(回転速度スケジュール)が算定済みであること、さらに算定したタービン起動運転プランの各ブレークポイント(BP)を通過進行中であることの各条件であり、この4つの論理積が採られて、ステップS36の真/偽が判定される。ステップS36の論理積が、偽(N)の場合は、手動の操作を開始できる状況でないので、ステップS45に進み、加速度指示値(XACL)として「0rpm2」が設定されて、これをステップS48により監視操作盤15の加速度指示計14に目標加速度値として表示する。一方、ステップS36の論理積が、真(y)の場合は、手動起動運転を開始できる、或いは手動起動操作中であり、ステップS37へ進む。
ステップS37では、自動化サーバ13により予めタービンの温度、負荷(予定出力)等の諸状況を踏まえて算定、計画している図2に示すタービン起動運転プラン(回転速度スケジュール)に対し、TSM起動制御装置12が把握している手動起動の経過時点或いは通過ブレークポイント(BP)を参照して、スケジュールに設定されている加速度値を読み出して、これをスケジュール加速度値(PSCHCAL=SCHACL)として設定し、次のステップS38へ進める。なお、この設定、表1の「S37」に示される各昇速率信号の組合せにより設定される。
次のステップS38では、サブルーチン「タービン回転数」が実施されて、タービンの実回転数(回転速度)と、自動化サーバ13により算出されているタービン起動運転プランに計画されている目標回転数とを、検出或いは参照する。
このステップS38で実施されるサブルーチン「タービン回転数」のフロー図を図4(a)に示す。このサブルーチンでは、ステップS381でサブルーチン「タービン回転数」が開始され、先ずステップS382で、タービン17aに取り付けられている回転センサ17bからの回転数信号により、タービンの実回転数を計測し、データ「RPMRAL」に書き込む。次にステップS383で、回転センサ17bの故障などによる計測不可或いはゼロ回転未満のデータになっていないかの真/偽が判定される。このステップS383の判定で、計測不可など(真)と判定された場合は、このサブルーチンを終了するステップS385へ進む。一方、ステップS385で正常な計測作動(偽)の判定した場合は、次のステップS384で、先に自動化サーバ13が算出設定しているタービン起動運転プランにおいてその時相に計画されている目標回転数を読み出して、データ「RPMREF」に書き込み、その後ステップS385で、サブルーチン「タービン回転数」を終了する。
ステップS38のサブルーチンの後、ステップS39により、タービンの回転の有無が判定される。この判定で回転が無い(偽)場合は、ステップS45へ進み、目標化速度値「XACL」の設定を「XACL=0rpm2」とし、停止を維持する。一方、回転が有る(真)と判定された場合は、ラブチェック運転中か、或いはその他の昇速運転中かを判定するために、ステップS40へ進める。
ステップS40では、表1の「S40」に示す判定事項「主蒸気バルブ操作」の3つの判定信号事項「ラブチェック・ブレーク・ポイント進行中」、「MSVバルブ全閉」、「MSVバルブ開き始め数mm前」をチェックする。この3つの判定事項の真・真・偽の論理積が採られて、ステップS40の真/偽が判定される。ステップS40の論理積が、真(Y)の場合は、ラブチェックにおける負加速度の減速を行う時相になったことを示すので、ステップS47へ進み、目標化速度値「XACL」の設定を「XACL=−100rpm2」とする。この加速度の設定は、ステップS48により監視操作盤15の加速度指示計14に目標加速度値として表示するので、運転員はこの表示の指示に従って、タービンの実加速度がこの目標化速度になるようにコントロールスイッチ16を運転操作し、ラブチェックの負加速度の減速運転を実施する。
一方、ステップS40で偽(N)と判定されと、ステップS41で、タービン17aの実回転数(RPMRAL)が、予め算出、設定されているタービン起動運転プラン(回転速度スケジュール)の対応する時相における目標回転数(RPMREF)前後の回転数(式1に示される範囲)となっているか、判定される。
RPMREF−100<RPMRAL(実回転数)<RPMREF+50 (式1)
ステップS41の判定で、式1に示す範囲内(真(Y))であれば、ステップS42に進める。
ステップS41の判定で、式1に示す範囲内(真(Y))であれば、ステップS42に進める。
このステップS42では、タービンの起動運転の時相が、「回転数保持中」の時相であるか否かが判定されて、「回転数保持中」であれば、さらにステップS45に進めて、目標加速度(XACL)を0rpm2に設定し、ステップS48でこの目標加速度を表示、指示する。
また、ステップS42で「回転数保持中」でない(タービンの昇速中)と判定すれば、ステップS46に進み、同じくタービン起動運転プランに計画され、先のステップS37で読込み設定したスケジュール加速度値(PSCHCAL=SCHACL)を目標加速度として設定し、ステップS48でこの目標加速度を表示、指示されて、運転員がタービンの昇速を維持する操作、運転を行う。
一方、先のステップS41の判定で、式1に示す範囲外(偽(N))であれば、ステップS43の適切な加速度を算出するサブルーチン「加速度算出」が実施されて、タービン起動運転プランに計画されたタービン状況の起動に戻す加速度の修正値を目標加速度とする。
ステップS43で行うサブルーチン「加速度算出」のフロー図を図4(b)に示す。このサブルーチンでは、ステップS431でサブルーチン「加速度算出」が開始され、先ずステップS432で、タービンの実回転数(RPMRAL)と目標回転数(RPMREF)との差のずれ回転数Xを式2で算出する。
X=PMREF(目標回転数)−RPMRAL(実回転数) (式2)
次に、ステップS433で、このずれ回転数Xが負数(真(Y))、すなわち実回転数が目標回転数を上回っているか、否かを判定する。このステップS433の判定で、真(Y)の場合は、実回転数が目標回転数を上回って、操作している加速度が過多であるので、次のステップS434によりずれ回転数XをX=0と置換え、ステップS435へ進む。一方、ずれ回転数Xが正値となり判定が偽(N)の場合は、実回転数が目標回転数に達していないので、ずれ回転数Xは保持してそのまま加速度値を補正するステップS435へ進める。
次に、ステップS433で、このずれ回転数Xが負数(真(Y))、すなわち実回転数が目標回転数を上回っているか、否かを判定する。このステップS433の判定で、真(Y)の場合は、実回転数が目標回転数を上回って、操作している加速度が過多であるので、次のステップS434によりずれ回転数XをX=0と置換え、ステップS435へ進む。一方、ずれ回転数Xが正値となり判定が偽(N)の場合は、実回転数が目標回転数に達していないので、ずれ回転数Xは保持してそのまま加速度値を補正するステップS435へ進める。
ステップS435において、先のスケジュールS37で設定したスケジュール加速度値(PSCHCAL)に対応する加速度算出式(式3)の係数a、b、cのセットを読み出す。ステップS436で、読み出した係数を適用して式3の補正の目標加速度(XACL)を算出する。なお、係数a、b、cは、対象となるタービンの運転特性により設計に置いて決定される数値であり、図示したものは1例を示してある。
XACL=aX2+bX+c (式3)
なお、実回転数が目標回転数を上回って、ステップS434でX=0と置換えている場合は、この算出結果はゼロ(XACL=0)となる。
なお、実回転数が目標回転数を上回って、ステップS434でX=0と置換えている場合は、この算出結果はゼロ(XACL=0)となる。
補正の目標加速度(XACL)を算出し終えると、ステップS437で加速度算出のサブルーチンを終了し、次のステップS44に戻る。
ステップS44では、ステップS436で算出した目標加速度が、ステップS37で読込んでいるスケジュール加速度値(PSCHCAL)と比較、判定される。算出した目標加速度がスケジュール加速度より大きい場合(判定が真(Y))は、算出したXACL値が、次のステップS48で、目標加速度として表示、指示されて、運転員がタービンの昇速を維持する操作、運転を行う。一方、算出した目標加速度がスケジュール加速度より小さい場合(判定が偽(N))は、ステップS46に進め、目標加速度値(XACL)はスケジュール加速度値(PSCHCAL)と差換えられて、次のステップS48で、これが表示、指示されて、運転員がタービンの昇速を維持する操作、運転を行う。
以上のように、タービン起動の状況に対応する加速度が、ステップS48により監視操作盤15の加速度指示計14に目標加速度値として表示した後、スタートのステップS31に戻り、タービン起動のそれぞれの時相がステップS36でチェックされて、次の目標加速度の算出が繰り返され、所定の定格回転数に達する。定格回転数になると、ステップS42で、回転数保持中となり、目標加速度は0rpm2が設定されて、定格運転に移行し手動による起動が終了する。
以上に説明したように、本実施形態によれば、タービンを手動で起動する場合に、予め設定されたラブチェックを含むタービン起動運転プラン(回転速度スケジュール)に沿った昇速パターンとなる加速度を、監視操作盤の表示計に目標加速度として表示できるので、運転員の起動運転の操作が容易となる効果がある。また、高温、高速で作動するタービンの性能、特性に基づいて設定されるタービン起動運転プランの正確な実施が可能となる操作を、本実施形態により行えるので、タービンの起動が、安全、かつ効率の良い安定に行える利点もある。
10・・・プロセス制御装置、
11・・・TSC制御装置、
12・・・TSM起動装置、
13・・・自動化サーバ、
14・・・加速度表示計、
15・・・監視操作盤、
16・・・コントロールスイッチ、
17・・・蒸気タービン発電機、
17a・・・タービン、
17b・・・回転センサ、
17c・・・ジェネレータ、
18・・・ボイラ、
19・・・バルブ。
11・・・TSC制御装置、
12・・・TSM起動装置、
13・・・自動化サーバ、
14・・・加速度表示計、
15・・・監視操作盤、
16・・・コントロールスイッチ、
17・・・蒸気タービン発電機、
17a・・・タービン、
17b・・・回転センサ、
17c・・・ジェネレータ、
18・・・ボイラ、
19・・・バルブ。
Claims (5)
- タービンの運転を行うプロセス制御装置に備えられ、前記タービンからの回転作動信号を受けて、前記タービンの起動を自動制御するタービン起動自動制御手段と、
前記タービンの作動状況を表示し、前記プロセス制御装置を操作する監視操作盤手段と、
このタービン起動自動制御手段の自動制御出力を停止し、前記監視操作盤手段から前記タービンの起動を手動操作により行う切換手段と、
前記手動操作に切換えた起動を行う場合に、タービンの起動開始後の各ステップにおける回転速度及び加速度を起動運転プランとして、前記タービンの状況に基づき作成、設定する起動スケジュールサーバ手段と、
前記切換手段の作動後に、前記タービン或いは前記タービン起動自動制御手段からの回転作動信号により実回転速度を算出し、設定された前記起動運転プランのスケジュール回転速度及びスケジュール加速度を読込み、起動開始後の各ステップにおいてこれ等を比較、判定し、その結果に基づいて手動により設定すべき目標加速度として、これを前記監視操作盤手段へ出力するタービン手動起動制御手段と、
このタービン手動起動制御手段から出力された前記目標加速度と、前記タービンの現況の加速度とを対比して表示する前記監視操作盤手段に備えた指示計手段と、
この指示計手段を監視する運転員が、前記タービンに注入する蒸気量或いはガス量を遠隔手動で操作するスイッチ手段とからなることを特徴とするタービン加速度表示手動起動装置。 - 前記起動スケジュールサーバ手段が作成、設定する起動運転プランは、前記タービンの温度、負荷(予定出力)、注入する蒸気或いはガスの温度及び圧力に基づき、ラブチェック(異常チェック)及び1回以上の定速保持(熱応力除去)を含む昇速プランであることを特徴とする請求項1記載のタービン加速度表示手動起動装置。
- 前記タービン手動起動制御手段が出力する目標加速度は、加速度指示の計算タイミングで無い場合、及びタービンの回転が停止している場合、及びタービンの回転数保持中の場合、及びタービンの実回転速度が前記起動運転プランに設定している目標回転速度との所定の許容差範囲を越えて大きい場合には、加速度0rpm2であり、
タービンの実回転速度が前記起動運転プランに設定しているスケジュール回転速度との所定の許容差範囲内の場合、及び所定の許容差範囲外で、所定の演算式により算出した加速度値が前記スケジュール加速度より小さい場合には、前記起動運転プランに設定しているスケジュール加速度値であり、
前記所定の許容差範囲外で、所定の演算式により算出した加速度値が前記スケジュール加速度より大きい場合には、前記算出した加速度値あり、
前記ラブチェック中の場合で、バルブが全閉され、所定のタービン回転速度に達したブレークポイント経過後では、所定の負の加速度値であることを特徴とする請求項1または2記載のタービン加速度表示手動起動装置。 - タービンの運転を行うプロセス制御装置に備えられ、前記タービンからの回転作動信号を受けて、前記タービンの起動を自動制御するタービン起動自動制御手段の作動/非作動を選択するモード選択ステップと、
このモード選択ステップで作動を選択した場合に、前記タービン起動自動制御手段による前記タービンの自動制御起動を行う自動制御起動ステップと、
前記モード選択ステップで非作動を選択した場合に、前記タービンを手動操作起動するため、前記タービンの状況に基づき、ラブチェック(異常チェック)及び1回以上の定速保持(熱応力除去)を含む、回転速度及び加速度の起動運転プランを作成、設定する起動スケジュール設定ステップと、
作成、設定された前記起動運転プランの回転速度及び加速度を読込んで前記タービンの起動を開始するタービン起動開始ステップと、
起動開始後の前記タービンの実回転速度をタービンに設けた回転センサからの回転信号により算出する実回転速度計測ステップと、
この実回転速度計測ステップで得た実回転速度と、読込んだ前記起動運転プランのスケジュール回転速度及びスケジュール加速度とを比較、判定し、回転速度保持の加速度ゼロ、及びラブチェックの負の加速度を含む前記起動運転プランに予め設定されたスケジュール加速度、或いは前記実回転速度と前記スケジュール回転速度との差による所定の演算式で
算出した加速度のいずれかを指示加速度として設定する加速度指示ステップと、
この加速度指示ステップで設定した指示加速度を目標加速度とし、前記実回転速度から算出した実加速度とし、これらの加速度を前記プロセス制御装置の監視操作盤手段の指示計に共に表示する指示計表示ステップとからなることを特徴とし、
この指示計の表示を監視する運動員が、前記タービンの蒸気或いはガスの注入バルブの開閉操作を手動で行いタービンの起動するタービン加速度表示手動起動方法。 - 前記加速度指示ステップは、加速度指示の計算タイミングで無い場合、及びタービンの回転が停止している場合、及びタービンの回転数保持中の場合、及びタービンの実回転速度が前記起動運転プランに設定している目標回転速度との所定の許容差範囲を越えて大きい場合には、加速度を0rpm2とするゼロ加速度指示ステップと、
タービンの実回転速度が前記起動運転プランに設定しているスケジュール回転速度との所定の許容差範囲内の場合、及び所定の許容差範囲外で、所定の演算式により算出した加速度値が前記スケジュール加速度より小さい場合には、加速度を前記起動運転プランに設定しているスケジュール加速度値とするスケジュール加速度指示ステップと、
前記所定の許容差範囲外で、所定の演算式により算出した加速度値が前記スケジュール加速度より大きい場合には、加速度を前記算出した加速度値とする算出加速度指示ステップと、
前記ラブチェック中の場合で、バルブが全閉され、所定のタービン回転速度に達したブレークポイント経過後では、加速度を所定の負の加速度値とする減速加速度指示ステップとが含まれてなることを特徴とする請求項4記載のタービン加速度表示手動起動方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106810A JP2005291083A (ja) | 2004-03-31 | 2004-03-31 | タービン加速度表示手動起動装置、及びその手動起動方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106810A JP2005291083A (ja) | 2004-03-31 | 2004-03-31 | タービン加速度表示手動起動装置、及びその手動起動方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291083A true JP2005291083A (ja) | 2005-10-20 |
Family
ID=35324300
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004106810A Pending JP2005291083A (ja) | 2004-03-31 | 2004-03-31 | タービン加速度表示手動起動装置、及びその手動起動方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005291083A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012057621A (ja) * | 2010-09-09 | 2012-03-22 | Nuovo Pignone Spa | ターボ機械における低トルク低速度試験のための方法及び装置 |
| CN102587995A (zh) * | 2011-01-17 | 2012-07-18 | 杭州中能汽轮动力有限公司 | 用于驱动300mw以下锅炉给水泵的汽轮机的转子及其启动方法 |
| CN110359969A (zh) * | 2018-05-22 | 2019-10-22 | 武汉理工大学 | 一种舰船汽轮主机转速控制方法 |
| WO2024009755A1 (ja) * | 2022-07-08 | 2024-01-11 | 三菱重工業株式会社 | ガスタービン用の制御装置、ガスタービン設備、ガスタービンの制御方法及びガスタービンの制御プログラム |
-
2004
- 2004-03-31 JP JP2004106810A patent/JP2005291083A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012057621A (ja) * | 2010-09-09 | 2012-03-22 | Nuovo Pignone Spa | ターボ機械における低トルク低速度試験のための方法及び装置 |
| US9157373B2 (en) | 2010-09-09 | 2015-10-13 | Nuovo Pignone, S.P.A. | Methods and devices for low speed low torque testing of a rotor in a turbomachinery |
| CN102587995A (zh) * | 2011-01-17 | 2012-07-18 | 杭州中能汽轮动力有限公司 | 用于驱动300mw以下锅炉给水泵的汽轮机的转子及其启动方法 |
| CN110359969A (zh) * | 2018-05-22 | 2019-10-22 | 武汉理工大学 | 一种舰船汽轮主机转速控制方法 |
| CN110359969B (zh) * | 2018-05-22 | 2021-07-20 | 武汉理工大学 | 一种舰船汽轮主机转速控制方法 |
| WO2024009755A1 (ja) * | 2022-07-08 | 2024-01-11 | 三菱重工業株式会社 | ガスタービン用の制御装置、ガスタービン設備、ガスタービンの制御方法及びガスタービンの制御プログラム |
| JP2024008393A (ja) * | 2022-07-08 | 2024-01-19 | 三菱重工業株式会社 | ガスタービン用の制御装置、ガスタービン設備、ガスタービンの制御方法及びガスタービンの制御プログラム |
| JP7743374B2 (ja) | 2022-07-08 | 2025-09-24 | 三菱重工業株式会社 | ガスタービン用の制御装置、ガスタービン設備、ガスタービンの制御方法及びガスタービンの制御プログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8285468B2 (en) | Systems and methods for using a combustion dynamics tuning algorithm with a multi-can combustor | |
| KR102072349B1 (ko) | 가스 터빈용 자동 테스팅 시스템 | |
| US11319963B2 (en) | Compressor surge control | |
| EP2390471B1 (en) | Blade monitoring system and method | |
| KR101376749B1 (ko) | 항공기 조종 지원 방법, 장치 및 항공기 | |
| CN101922474B (zh) | 用于向涡轮构件提供喘振保护的系统和方法 | |
| JPS6324122B2 (ja) | ||
| RU2562131C2 (ru) | Способ управления турбомашиной | |
| KR20170053681A (ko) | 건식 저공해 기관을 위한 벌크 화염 온도 조정기 | |
| JP5471407B2 (ja) | 回転体の振動監視装置 | |
| JP2005291083A (ja) | タービン加速度表示手動起動装置、及びその手動起動方法 | |
| JP2016125497A (ja) | ターボ機械用の可変ランプ速度を生成するためのシステム及び方法 | |
| JP6334131B2 (ja) | タービンの始動シーケンスの完了時に予測通りの負荷を生成するシステム及び方法 | |
| EP3974634A1 (en) | Temperature based gas turbine control and method | |
| JP2017025819A (ja) | 発電プラントの起動制御装置及び起動制御方法 | |
| WO2022023261A1 (en) | Continuous flow engine monitoring method and system | |
| JPH0588707A (ja) | プラント運転自動化装置 | |
| EP2971651B1 (en) | Methods for operating a gas turbine engine | |
| KR102319798B1 (ko) | 원자력발전소의 보조급수펌프터빈 제어 시스템 및 방법 | |
| JPH02294525A (ja) | ガスタービンの寿命監視システム | |
| JPWO2023218516A5 (ja) | ||
| JP2019145156A (ja) | 制御パラメータ最適化システム及びそれを備えた運転制御最適化装置 | |
| JP6908930B2 (ja) | 情報生成装置及び情報生成方法 | |
| JPS6380022A (ja) | ガスタ−ビンの制御装置 | |
| CN120444095A (zh) | 转子不平衡振动精稳抑制系统、方法及控制终端 |