JP2005240529A - 泥土浚渫装置 - Google Patents
泥土浚渫装置 Download PDFInfo
- Publication number
- JP2005240529A JP2005240529A JP2004085705A JP2004085705A JP2005240529A JP 2005240529 A JP2005240529 A JP 2005240529A JP 2004085705 A JP2004085705 A JP 2004085705A JP 2004085705 A JP2004085705 A JP 2004085705A JP 2005240529 A JP2005240529 A JP 2005240529A
- Authority
- JP
- Japan
- Prior art keywords
- mud
- collection box
- dredging
- floating body
- lid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Abstract
【課題】泥土に衝撃を与えず泥土を水中に拡散させることなく広範囲に泥土を浚渫する高濃度浚渫に関する装置を提供する。
【解決手段】浮遊体17の垂直方向下部には略コ字形状の躯体で開口部側に開閉扉19が上下移動自在に嵌合され、上面には上下移動自在に嵌合する密閉蓋18を有している集泥箱16がある。集泥箱16の中には吸入口20が設けられ吸入管6と連結されている。集泥箱16の底面は開口されており、車輪22が装着されている。集泥箱16の開口部の両枠には牽引船2と接続されている牽引ロープ3,4が連結され、両枠にクレーン等で吊り上げる吊金具29が取付けられている。
【選択図】図2
【解決手段】浮遊体17の垂直方向下部には略コ字形状の躯体で開口部側に開閉扉19が上下移動自在に嵌合され、上面には上下移動自在に嵌合する密閉蓋18を有している集泥箱16がある。集泥箱16の中には吸入口20が設けられ吸入管6と連結されている。集泥箱16の底面は開口されており、車輪22が装着されている。集泥箱16の開口部の両枠には牽引船2と接続されている牽引ロープ3,4が連結され、両枠にクレーン等で吊り上げる吊金具29が取付けられている。
【選択図】図2
Description
本発明は、泥土の浚渫に関するもので、主に、湖沼及び海底に堆積するヘドロと呼ばれる泥土の浚渫に関するものである。
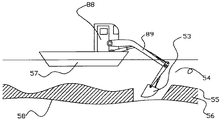
湖沼や海底において、植物プランクトンや有機物、重金属等が堆積した泥土はヘドロと呼ばれ水質悪化を招き大きな社会問題となっている。図5は従来の浚渫方法の一例で、自由に水面上を移動可能な台船93にクレーン91が装備され、当該クレーン91にワイヤー92が架設しており当該ワイヤー92の先端にはクラムシェル94が吊設している。クラムシェル94は台船93上の図示しない操作室にてクラムシェルの開閉及び上下移動を操作し湖沼あるいは海底に堆積した泥士を浚渫する。即ちクラムシェルを開状態で泥土に接触させクラムシェルの自重で泥土内に沈下させる。ここで上記の台船93上の操作室にてクラムシェル94を閉じると泥土がクラムシェル94内部に掘削収納されることになる。泥土を掘削収納したクラムシェル94を閉状態のままワイヤー92で吊り上げ図示はしていない運搬船に当該掘削した泥土を積んで浚渫を行う。また図6においては台船57にパワーショベルアーム89が装備され、パワーショベルアーム89は操作室の操作により上下左右に旋回移動自在となっている。パワーショベルアーム89の先端にはバケット53が枢支され枢軸を中心に180°を限度として回転可能となっている。尚バケットは内部が空洞な略半球体形状をしている。ここで台船57上に装備されている操作室51にてパワーショベルアーム89を操作しバケット53の略半球体切断面側で泥土を掬い上げる。バケット53内に掬い上げられた泥土を溢さぬようにバケット53を水平に保持し、パワーショベルアーム89を操作して水上に持ち上げ図示しない運搬船に積載することにより湖沼あるいは海底に堆積した泥土を浚渫する。しかし泥土は植物プランクトンや有機物等が水流の停滞した場所で酸素不足等により分解されずに沈殿したものであり粒子が細かく、前述のクラムシェル及びパワーショベルのバケットで浚渫しようとすると沈殿している泥土に衝撃を与えることになり、泥土が容易に周囲の水中に溶け込み効果的な浚渫が難しい結果となる。因みに前記クラムシェル及びパワーショベルでの浚渫は砂礫や固形塊等の浚渫に適したものであり、これらクラムシェルやパワーショベルによる泥土の浚渫は泥土を水中に拡散させ下流あるいは他場所への移動をさせたに過ぎに、本来の浚渫とはならない。
前述の欠点を補うために、ポンプで泥土を吸引して輸送管で所定の場所に輸送する方法がある。図7はこの浚渫方法の一例を示すもので、浚渫船本体59の先端に掘削深度に見合った上下可能なラダー60を突出し、その先端にカッターヘッド等の集泥装置63を取り付け、更に浚渫船本体59の後部左右にスパッド66、67とこのスパッドを昇降させるシリンダー等からなるスパッド昇降装置82を設けると共に、前部左右に設けたウインチ61から引き出したワイヤー62を水底のアンカーに固定し、そして水底に打ち込んだスパッド66,67を中心とし、ウインチ61とスパッド昇降装置82のシリンダーを操作して浚渫船本体59を左右に旋回してジグザグ状に前進しながら浚渫作業をするようになっている。このような浚渫船を使用する場合、例えば集泥装置63を右側に向け、スパッド66、67の一方を水底に打込み、集泥装置63を集泥状態にしてウインチ61を操作して矢印64方向に旋回しながら右向きに浚渫する。そして所定の範囲の浚渫が終わるとスパッド66,67のもう一方を打ち込み、他方を引上げ、しかる後ラダー60を上昇させて集泥装置63を浚渫地盤から一旦持ち上げ、ウインチ61を操作して点線で示す矢印65方向に集泥装置63を浚渫区画の左端に旋回し、スパッド66,67の引上げていた方を打込み、他方を引上げる。そしてラダー60を再び浚渫地盤上に下降して集泥状態とし、ウインチ61を操作し、実線で示す矢印83方向に旋回しながら浚渫するものである。また前記と同じポンプで泥土を吸引して輸送管で所定の場所に輸送する方法であるが双方向型の集泥装置を使用した従来の浚渫方法もある。
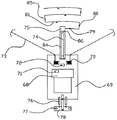
上記を改良した方法として、例えば特開報「特開平9−3962」に記載されている方法がある。図8において、集泥方法として、浚渫船69のラダー74の先端に支持したフレーム84の先端に集泥装置の集泥ヘッド75を回転可能に支持し、浚渫船69の旋回方向に集泥ヘッド75を向けると共に浚渫作業を行う第一の工程79と、前記第一の工程が終了すると、集泥ヘッド75を浚渫船69の略長手方向に向けて浚渫作業を行う第二の工程80と、前記第一の工程における集泥ヘッド75の方向とは逆の方向に集泥ヘッド75を向けると共に逆の方向に浚渫船69を旋回しながら浚渫作業を行う第三の工程81と、前記第二の工程と同様な操作を行う第四の工程85と、以後前記工程を繰り返しながら、連続的に浚渫作業をするように構成している。集泥方法としては、集泥ヘッド75を回転する角度を略90°としている。集泥装置は、浚渫船のラダー74の先端に支持したフレーム84より延長された支持台86に図示しないスイベルジョイントを介して集泥ヘッド75を回転可能に支持し、前記集泥ヘッド75は前記フレーム84に対して回転させるための駆動装置を設けて構成している。集泥ヘッド75を駆動する装置は2本のシリンダー76であって、1本のシリンダー76を操作した時に集泥ヘッド75を中立軸に対して一方向に略90°回転させ、他方のシリンダー76を操作した時に集泥ヘッド75を前記中立軸に対して他方向に略90°回転させるように構成している。集泥ヘッド75の後方左右に図示しない導泥板によって前工程終了後の地山壁面が崩壊した土砂をかき寄せ、集泥ヘッド75に導くように構成している。集泥ヘッド75の下方に図示しない鳥籠形の流動化翼を駆動可能に設け、また図示しない集泥口前方の泥を攪拌するように構成している。集泥ヘッド75の集泥室の入口部に異物の流入を阻止する図示しないスクリーンと、このスクリーンの前に溜まった異物を押下する図示しない異物除去装置および集泥装置内で発生した汚濁を外に出さないようにするための図示しないシャッターを設け、前記集泥室の下方に鳥籠形の流動化翼を駆動可能に設けて構成している。浚渫船のラダー74の先端でフレーム84を支持し、このフレーム84より延長された支持台86にスイベルジョイントを介して集泥ヘッド75を回転可能に支持し、前記集泥ヘッド75は前記フレーム2に対して回転させる駆動装置を設け、更に集泥ヘッド75の上方に気体を集める図示しないフードと、浚渫地盤との距離を測定する図示しないセンサーを設けている。また、ラダーはリンク機構となっているため、集泥装置を如何なる位置にセットしても泥ヘッド75は常に水平(あるいは浚渫地盤に対して平行)を保つようになっている。集泥装置の集泥ヘッド75を中立軸に対して略90°左右に回転するようにしているので、この集泥装置を前進させる時も集泥操作をすることができ、浚渫船本体の旋回時と前進時に連続的に浚渫作業をすることができる。
上記の従来の方法は、微粒子が堆積した泥土をポンプで吸引すると言う理に適った方法ではあるが、泥土は植物プランクトンや有機物、重金属等が堆積した粒子の細かい物質であり、僅かな衝撃で水中に飛散する特性を持っている。一旦水中に泥土が飛散すると泥土の超微粒子的性質から水中に溶け込んでしまい、浚渫はおろかフィルターを利用する濾過さえもフィルターの目を細かくする必要があり浚渫が難しくなるのである。従来の方法及び装置では、大型の集泥装置を左右に操作するために船体後部に設けたスパットを水底に打ち込み集泥装置を左右に移動する基点となし、船体前方両端には集泥装置をワイヤーで牽引するアンカーを水底に打ち込んで集泥装置を左右に移動する必要があるため、アンカーやスパットの打ち込みと引き抜き操作で浚渫する泥土の拡散が起こることになる。泥土を浚渫するには泥土に可能な限り衝撃を与えず泥土が堆積したそのままの状態で浚渫する方法、所謂高濃度浚渫方法が最も効果的な方法である。
本発明に係わる浚渫の集泥方法は、前記従来の欠点を解消するために得られたものであって、次のように構成されている。僅かな衝撃で水中に拡散する性質の泥土に対して可能な限り衝撃を和らげる目的で水中に放置すれば自然落下する略コ字構造の躯体を成しており当該躯体の閉口部両端角は曲面を成し当該閉口部壁略中央に吸入管と連結された吸入口が穿孔され当該躯体内部に当該吸入口を塞覆する状態で異物を除去するフィルターが取付けられ当該躯体下部は両側の側壁中央部下端が谷底形状即ち正面から見て側壁中央部の下端を頂点として開口部側と平行部側に向かってそれぞれ斜上に切断されている形状を成し当該両側の谷底端部付近に車輪をそれぞれ回転自在に取付けられ上記斜上に切断された下端に接着し当該側壁中央部下端の水平延長上まで延長された弾性板材料から成る弾性側壁と弾性後壁で構成され上記躯体の開口部を成す両枠面上に牽引ワイヤーを架ける金具を上部と下部にそれぞれ取付けられている集泥箱と、前記集泥箱の上方で十分な浮力を有して水面上に浮く内部が空洞なあるいは浮力のある充填物を有した略横長の箱体で長手部側壁には後述する密閉蓋から延長され当該密閉蓋の上下移動を行う蓋吊ロッドをガイドする立溝が2ヶ所それぞれ有しており当該立溝上面には前記蓋吊ロッドと噛合する歯車がそれぞれ取付けられており当該4個の歯車は前方の両側の歯車と後方の両側の歯車が同回転を成すためにシャフトでそれぞれ連結されておりシャフト固定金具で回転自在に固定された当該シャフトにはそれぞれ駆動モータとベルトで連動するプーリーが取付けられ当該2個のプーリー間略中央部には前記駆動モータが取付けられ前記2個のプーリーの内1つとはベルトが逆繋で1個の駆動モータで二つのシャフトが同方向に回転する構造を成しており当該箱体前方即ち前記略コ字躯体の開口部上部側にある前壁には後述する扉から延長された1面に歯切りが施されている扉吊ロッドをガイドする金具が左右に上部と下部にそれぞれ2個取付けられ当該立方体の上面には当該扉吊ロッドに噛合する位置に歯車がそれぞれ装着され当該左右の歯車は同回転を成すためにシャフト固定金具で回転自在に固定されたシャフトで連結されており当該シャフト略中央部には駆動モータとベルトで連結するプーリーが取付けられている構造の浮遊体と、前記集泥箱の開口部両枠と上下移動自在に嵌合する硬質材料から成る板状体で下端面には弾性材料から成る板状体が接合し当該弾性材料の下端から当該硬質材料の上端までの高さは前記集泥箱の高さと一致し当該硬質材料の板状体の上面部には1面が歯切りを施した棒状の扉吊ロッドが左右に2本接合し前記歯車と噛合する位置まで延長されている構造を有する開閉扉と、前記集泥装置を平面に見て当該集泥装置内面と整合する形状で開口部側と平行部側が弾性材料から成り中央部が硬質材料から成る上下移動自在な蓋で中央部硬質材料の四隅には一面が歯切りされた棒状の蓋吊ロッドが接合し前記歯車と噛合する位置まで上方に延長されている密閉蓋とから成る集泥装置である。
本発明の上記構造から成る集泥装置は上部の浮遊体と下部の集泥箱からなり当該下部の集泥箱には上下に移動自在な当該集泥箱の上部を密閉する密閉蓋を有し開口部には上下移動で開閉を行う開閉扉を備えている。本発明の集泥装置をクレーン等で吊って静かに海底に泥土が堆積する水中に沈めた場合下面が開放されている集泥箱は自重で泥土内に大きな衝撃を泥土に与えることなく沈み地盤で止まる。一方上部の浮遊体は浮力があるため水面上に浮かぶ。ここで予め浚渫する泥土の堆積高を測定し堆積高に合わせて蓋吊ロッド長を調節しておけば当該集泥箱が泥土に沈んだ状態の時には当該密閉蓋は泥土上面の位置にある。またこの時集泥箱開口部に備えてある開閉蓋は閉じた状態にある。即ち泥土は沈んだ集泥箱によって側壁部と上部が覆われた状態となっている。この状態で真空ポンプを稼動し集泥箱後部に穿孔されている吸入口から集泥箱内部の泥土を吸引すれば所謂高濃度浚渫が可能となる。集泥箱内部の浚渫を完了した時点で真空ポンプを止め集泥箱前方の開閉扉を開け開口部両枠に取付けてある牽引金具に繋がれたワイヤで連結する牽引船で集泥箱を泥土が堆積している前方に移動させ次の浚渫場所では開閉扉を閉じ真空ポンプを稼動し集泥箱内の泥土を浚渫する。この作業を繰り返すことにより植物プランクトンや有機物、重金属等が堆積した粒子の細かい物質で僅かな衝撃で水中に飛散する特性を持っている泥土に対し大きな衝撃を加えることもなくまた開閉可能な扉を設けることにより浚渫する泥土を覆うため高濃度浚渫が可能となる。
水底は平坦とは限らず大きな石等の障害物が存在するが、本発明の集泥装置の集泥箱底部は正面から見て中央下端を頂点とし当該頂点部には車輪を両側に備え当該頂点から左右方向に斜上に切断され当該切断部にはゴム等の弾性材料が接合されまた前方開閉扉下部にもゴム等の弾性材料が接合されているため当該車輪を軸として左右に傾き自在となる。また当該集泥箱に整合し上部を密閉している蓋は前方部及び後方部が長さに余裕を持った弾性材料から成っており正面から見て集泥箱が左右に傾いた状態であっても密閉に間隙を有することはない。上記の構造を有する集泥装置で進行方向に障害物があった場合、開口部両枠下部に連結されているワイヤを牽引すれば前方がせり上がり容易に障害物を越えることが可能となる。また集泥箱両側下部に取付けられている車輪も前方方向への移動を容易にする。
泥土は植物プランクトンや有機物、重金属等が堆積した粒子の細かい物質であり、僅かな衝撃で水中に飛散する特性を持っていて、一旦水中に泥土が飛散すると泥土の超微粒子的性質から水中に溶け込んでしまい、浚渫はおろかフィルターを利用する濾過さえもフィルターの目を細かくする必要があり浚渫が難しくなるのである。従来の泥土浚渫方法では、大型の集泥装置を前後に移動操作をする基点のために船体後部にスパットを水底に打ち込み、また集泥装置を左右に牽引するために船体前方左右両翼にアンカーを海底に打ち込んで作業を行うため、泥土の拡散が起こる。本発明の泥土浚渫方法では、泥土に可能な限り衝撃を与えず泥土が堆積したそのままの状態で浚渫する方法所謂高濃度浚渫方法が可能となる。
本発明である泥土浚渫方法に関し図面を参照して実施例を説明する。但し下記実施例は、本発明の基本的な考えを具現化する一例に過ぎず、下記実施例に本発明が拘束あるいは限定されるものではない。
図1は本発明の浚渫装置施工概要図である。図示しないクレーン等によって静かに浚渫する泥土に降ろした浚渫装置1は、水上に浮く浮遊体17と集泥箱16と、上面で接合し浮遊体1の歯車と噛合する位置まで延長している蓋吊ロッド31を有し平面で当該集泥箱16に形状が整合して集泥箱16の上部を密閉し上下移動自在な密閉蓋18と、集泥箱16の開口部両枠と上下移動自在に嵌合し上部が浮遊体17の歯車と噛合する扉吊ロッド30で連結され上下移動自在の開閉扉19から成り、地盤15で止まる。集泥箱16の閉口部後壁中央部は穿孔されており外部から延長されている吸引管6と連結されている。当該吸引管6は台船9上に搭載されている真空ポンプ5を介して排出管7に連結されている。ここで水面から静かに降ろされる浚渫装置は、開閉扉19の上部から延長され浮遊体17上で噛合する扉吊ロッド30を下方に移動して開閉扉19で集泥箱16の開口部を閉じており、また密閉蓋18の上面から延長され浮遊体17上で噛合する蓋吊ロッド31を上下に操作して予め測定された泥土深度の位置に調節されている密閉蓋18は泥土上面の位置になるように高さ調節されている。浚渫装置1の底部は開放されており、この状態で図示しないクレーン等から水面に静かに降ろされる浚渫装置1は泥土内に沈み込み地盤15で停止する。この時浚渫装置1内の泥土は周部が集泥箱16と開閉扉19で包囲され上部は泥土上面に高さ調節された密閉蓋18で密閉されている。ここで真空ポンプ5を稼動させると集泥箱後壁中央部に穿孔されている孔から外部に連結されている吸引管6を通り排出管7から台船9に設置されている泥土集積容器8に搬送される。浚渫装置1内の泥土は外部から遮断した状態で浚渫が可能となり所謂高濃度浚渫となり、また外部の泥土に振動や衝撃を与えずに浚渫が可能となるため従来の浚渫施工で起こりがちな泥土の拡散が大幅に減少することが可能となる。浚渫装置1内の泥土浚渫が完了すると真空ポンプ5の稼動を停止し集泥箱16の開口部即ち前部を閉じている開閉扉19が浮遊体17上の歯車と噛合する扉吊ロッド30の操作によって上方に移動し集泥箱16を開く。集泥箱16の開口部両枠には上部には左右に上牽引ロープ3が下部には左右に下牽引ロープ4が繋がれており上牽引ロープ3は牽引船2上に設置されている上プーリー10を介して上リール12に、また下牽引ロープ4は牽引船2上に設置されている下プーリー11を介して下リール13に繋がれており上牽引ロープ3と下牽引ロープ4とは独立した働きになる構造になっている。開閉扉19を上方に移動し開口部が開いた状態で上牽引ロープ3及び下牽引ロープ4を巻き上げるかあるいは牽引船が前方に移動すると浚渫装置1は前方に移動し新たな泥土が集泥箱16内に入ることとなり、浮遊体17の歯車で噛合している扉吊ロッド30を下げて開閉扉19を下げ泥土を集泥箱16で包囲し再び真空ポンプ5を稼動し集泥箱16内の泥土を浚渫する。この作業を繰り返すことにより広範囲の泥土を拡散させることなく浚渫することが可能となる。尚、集泥箱16内の泥土の浚渫完了は真空ポンプ5に装備された圧力センサーあるいは集泥平均時間を計算することによって知ることが出来る。
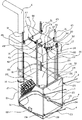
図2は本発明の浚渫装置全体立体図である。浮遊体17は内部が空洞あるいは浮力のある物質が充填されており上面には開閉扉19の垂直方向上方には開閉扉19の上部と接合し上方に延長されている棒状2本の扉吊ロッド30と噛合する歯車32がそれぞれ設置されており2個の歯車32は同回転となるようにシャフト33によって同軸に連結されておりシャフト33にはモータ38の回転力がベルト37を介して伝達するプーリー35が同軸に取付けられている。更に浮遊体17の上面側部には垂直方向下方に位置する密閉蓋18の上面に接合し上方に延長されている4本の蓋吊ロッド31と噛合する歯車45がそれぞれ設置されており当該4本の蓋吊ロッド31に噛合4個の歯車45の内浮遊体17の長手方向前部2個の歯車45は同軸にシャフト40で連結され後部2個の歯車45は同軸にシャフト50で同軸に連結されている。シャフト40及びシャフト50にはモータ44の回転を伝達するプーリー42とプーリー47がそれぞれ同軸に取付けられており1個のモータ44で4個の歯車45を同回転速度及び同回転方向にするためにベルト42あるいはベルト49の内片方は逆ベルトとなっている。浮遊体17の垂直方向下部には集泥箱16が位置している。集泥箱16の形状は略コ字形状の躯体で開口部側には前記開閉蓋吊ロッド30と上部が接合されている開閉扉19が上下移動自在に嵌合されていて、平面に見て集泥箱16の形状と整合し前記蓋吊ロッド31と上面が接合されて上下移動自在に嵌合する密閉蓋18を有している。尚、密閉蓋18は蓋吊ロッド31と連結する中央部は硬性板材料から成る剛体蓋36と剛体蓋36と接合し開口部方向及び閉口部方向に中泥箱16に整合するように延長された弾性板材料から成る弾性蓋25と26から構成されている。集泥箱16の閉口部壁中央部付近は穿孔され吸入口20が設けられ外部に吸入管6と連結されている。吸入口20の周部で集泥箱16の内部にはフィルター21が取付けられている。集泥箱16の底面は開口されており両側側壁の最底部中心を頂点として開口部方向及び閉口部方向に斜上に切断されており当該切断面下面と接合し下方前記頂点と水平方向同位置まで延長されている弾性板材料から成る弾性側壁24と弾性後壁51が取付けられ当該頂点部には回転自在に車輪22が装着されている。また前記開閉扉19の下端にも弾性板材料から成る弾性扉23が取付けられている。集泥箱16の開口部の両枠には前記牽引船と接続されている牽引ロープが連結可能となるように当該両枠の上方には上牽引金具27そして下方には下牽引金具28がまた集泥箱16上部には浚渫竣工時に図示されていないクレーン等で本発明の浚渫装置を吊上げる吊金具29が取付けられている。上記の構造を有する本発明の浚渫装置を浚渫開始時にクレーン等のワイヤーを吊金具29に接続し吊上げ浚渫する泥土上で静かに降ろされるが、浮遊体17は水面上に浮かび集泥箱16は泥土に沈み地盤で停止する。
図3は浚渫時の浚渫装置断面立体図である。浮遊体17上部に設置されているモータ38を操作して扉吊ロッド30は下げられており開閉扉19は集泥箱16の開口部を閉じている状態である。また浮遊体17上部に設置されているモータ44を操作して蓋吊ロッド31を上下に移動させ予め測定された泥土の深さと同位置に密閉蓋18がなるように高さ調節されている。集泥箱16は開口部が開閉蓋19で閉塞されまた上面は密閉蓋で閉塞されている。この状態で前記の真空ポンプを稼動させると集泥箱内部の泥土は吸入口20から吸入管6に吸入されることになりまた吸入管6を通過しない石等の異物はフィルター21で除去される。上記の浚渫方法により浚渫される集泥箱16内の泥土は外部と遮断された状態で浚渫されることとなり高濃度浚渫となるのである。また浚渫する泥土は遮断されているため外部の泥土に衝撃や振動を与えることがないため泥土の拡散を減ずることが可能となる。
図4は移動時の浚渫装置断面立体図である。集泥箱16内の泥土浚渫が終了すると前記真空ポンプの稼動を停止させると同時に集泥箱16の開口部を閉塞していた開閉扉19をモータ38の回転で上方に持ち上げ開口状態とする。この状態で前記牽引船に接続されている上牽引ロープ3と下牽引ロープ4により集泥箱16が牽引され泥土が集泥箱16内に充填されることになる。ところで水底の地盤は常に平坦とは限らず障害物等も存在する。ここで上牽引ロープ3と下牽引ロープ4は前記の上リールと下リールによって独立した働きが可能であり集泥箱16の進行方向に障害物等が存在する場合下牽引ロープ4のみを巻き上げると集泥箱16の開口部側が上方に持ち上げられ進行方法に存在する障害物等を越え易くなる。そして集泥箱16の底部は周壁が弾性材料から成っているため集泥箱16の傾きを容易にする構造となっている。また図3の浚渫時にフィルター21で除去された石等の障害物は集泥箱16内に内在しているが、集泥箱16の移動時に上牽引ロープ3のみを巻き上げることにより集泥箱16の閉口部側が持ち上がり集泥箱16内部に残っている石等の障害物を越えて移動がし易くなる。集泥箱16の中央部下部に成形されている両側頂点部には集泥箱16を移動し易くするために回転自在に車輪22が装備されているが、柔らかな地盤に対応するために当該車輪22の替わりに両端が上方の湾曲した略スキー板形状の滑り板を取付けても良い。
1・・・・・・浚渫装置
2・・・・・・牽引船
3・・・・・・上牽引ロープ
4・・・・・・下牽引ロープ
5・・・・・・真空ポンプ
6・・・・・・吸引管
7・・・・・・排出管
8・・・・・・泥土集積容器
9・・・・・・台船
10・・・・・上プーリー
11・・・・・下プーリー
12・・・・・上リール
13・・・・・下リール
14・・・・・泥土
16・・・・・集泥箱
17・・・・・浮遊体
18・・・・・剛体蓋
19・・・・・開閉扉
20・・・・・吸入口
21・・・・・フィルター
22・・・・・車輪
2・・・・・・牽引船
3・・・・・・上牽引ロープ
4・・・・・・下牽引ロープ
5・・・・・・真空ポンプ
6・・・・・・吸引管
7・・・・・・排出管
8・・・・・・泥土集積容器
9・・・・・・台船
10・・・・・上プーリー
11・・・・・下プーリー
12・・・・・上リール
13・・・・・下リール
14・・・・・泥土
16・・・・・集泥箱
17・・・・・浮遊体
18・・・・・剛体蓋
19・・・・・開閉扉
20・・・・・吸入口
21・・・・・フィルター
22・・・・・車輪
Claims (5)
- 僅かな衝撃で水中に拡散する性質の泥土に対して可能な限り衝撃を和らげるためクレーン等で吊上げ静かに水中に下ろして泥土浚渫位置に配置する浚渫装置であって、浮力を有する浮遊体と当該浮遊体の下方に位置し略コ字形状躯体の集泥箱から構成される浚渫装置で、前記集泥箱は棒形状で一端は下記開閉扉に接合し中間部は前記浮遊体の側壁に付着し他端は当該浮遊体上方まで延長される複数の扉吊ロッドを有し当該集泥箱両枠に垂直方向上下移動自在に嵌合する板形状の開閉扉と平面に見て当該集泥箱形状に整合する板状体で当該集泥箱内を垂直方向上下に移動自在であり一端が当該板状体に接合し中間部が前記浮遊体側壁に付着し他端が当該浮遊体上方に延長されている複数の棒形状の蓋吊ロッドを有する密閉蓋と前記集泥箱閉口部中央部は穿孔され外部から延長されて当該穿孔部に連結される吸入管を装備した吸入口と当該集泥箱の内部で当該吸入口周部に接合する網目状のフィルターとから構成され、一方前記浮遊体は内部が空洞あるいは浮力を有する材料が充填され上部面上には前記扉吊ロッドを噛合あるいは他方法にて当該扉吊ロッドを上下に移動可能に操作可能な装置と前記蓋吊ロッドを噛合あるいは他方法にて当該蓋吊ロッドを上下に移動可能に操作可能な装置を有する構造の浚渫装置。
- 請求項1記載の浚渫装置において、前記集泥箱両側側壁は下端面が中央下部を頂点とした略V字形状を成し両側当該頂点部には横方向移動を助ける回転自在な車輪あるいは両端が上方に湾曲した略スキー板形状の板材を装備し当該略V字形状下端部に接合し下方に弾性板材料が当該頂点水平方向位置まで延長され、また前記開閉扉の下端部には弾性板材料が接合されている浚渫装置。
- 請求項1及び2記載の浚渫装置において、前記吸入管は水上に浮かぶ台船上に装備された真空ポンプに接続され当該真空ポンプからは排水管が当該台船上あるいは陸上に設けられた泥土を集積する容器に導かれ、前記集泥箱にはロープ、ワイヤーあるいはアームの一端が接続され他端は水上に浮かぶ牽引船に接続された浚渫装置と浚渫方法。
- 請求項1、2及び3記載の浚渫装置及び浚渫方法において、前記集泥箱内を上下移動自在な密着蓋は前記蓋吊ロッドを上下に移動可能に操作可能な装置によって予め測定された泥土高と同高さになるように位置決めされ前記集泥箱内の泥土を周部が当該集泥箱の周壁と前記開閉扉によって包囲し上部を泥土高さと同位置決めされた前期密閉蓋によって包囲した状態で前記吸入口から泥土を浚渫する浚渫方法。
- 請求項1、2、3及び4記載の浚渫装置及び浚渫方法において、前記集泥箱開口部両側の枠部に複数のロープ、ワイヤーあるいはアームが前記牽引船から延長されて接続されており当該複数のロープ、ワイヤーあるいはアームは独立した動きが可能で前記集泥箱の前方即ち開口部側を持上あるいは後方即ち閉口部側を持上可能とした浚渫装置及び浚渫方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004085705A JP2005240529A (ja) | 2004-02-26 | 2004-02-26 | 泥土浚渫装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004085705A JP2005240529A (ja) | 2004-02-26 | 2004-02-26 | 泥土浚渫装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005240529A true JP2005240529A (ja) | 2005-09-08 |
Family
ID=35022548
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004085705A Pending JP2005240529A (ja) | 2004-02-26 | 2004-02-26 | 泥土浚渫装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005240529A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008069608A (ja) * | 2006-09-15 | 2008-03-27 | Sutaddo Kogyo Kk | ファームポンド底部の堆積物を排出する方法 |
| JP2015190139A (ja) * | 2014-03-27 | 2015-11-02 | 三菱重工業株式会社 | 浚渫土の処理装置及び方法 |
| CN105839686A (zh) * | 2016-05-12 | 2016-08-10 | 浙江鸿程传动机械有限公司 | 一种河塘水下清淤机器人 |
| CN108222099A (zh) * | 2018-03-14 | 2018-06-29 | 佛山市千注利科技有限公司 | 一种具有环保的水底清淤装置 |
| JP2020034439A (ja) * | 2018-08-30 | 2020-03-05 | 株式会社Winビジネスデベロップメント | 浚渫装置 |
| CN112942476A (zh) * | 2021-02-05 | 2021-06-11 | 王晨阳 | 一种水利工程施工用河道清淤设备 |
| CN113482080A (zh) * | 2021-06-24 | 2021-10-08 | 北京碧鑫水务有限公司 | 一种河道淤泥清除装置及清除方法 |
| CN114635470A (zh) * | 2022-04-18 | 2022-06-17 | 正中路桥建设发展有限公司 | 清淤疏浚装置 |
-
2004
- 2004-02-26 JP JP2004085705A patent/JP2005240529A/ja active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008069608A (ja) * | 2006-09-15 | 2008-03-27 | Sutaddo Kogyo Kk | ファームポンド底部の堆積物を排出する方法 |
| JP2015190139A (ja) * | 2014-03-27 | 2015-11-02 | 三菱重工業株式会社 | 浚渫土の処理装置及び方法 |
| CN105839686A (zh) * | 2016-05-12 | 2016-08-10 | 浙江鸿程传动机械有限公司 | 一种河塘水下清淤机器人 |
| CN105839686B (zh) * | 2016-05-12 | 2018-05-22 | 浙江鸿程传动机械有限公司 | 一种河塘水下清淤机器人 |
| CN108222099A (zh) * | 2018-03-14 | 2018-06-29 | 佛山市千注利科技有限公司 | 一种具有环保的水底清淤装置 |
| JP2020034439A (ja) * | 2018-08-30 | 2020-03-05 | 株式会社Winビジネスデベロップメント | 浚渫装置 |
| CN112942476A (zh) * | 2021-02-05 | 2021-06-11 | 王晨阳 | 一种水利工程施工用河道清淤设备 |
| CN112942476B (zh) * | 2021-02-05 | 2022-05-31 | 王晨阳 | 一种水利工程施工用河道清淤设备 |
| CN113482080A (zh) * | 2021-06-24 | 2021-10-08 | 北京碧鑫水务有限公司 | 一种河道淤泥清除装置及清除方法 |
| CN113482080B (zh) * | 2021-06-24 | 2022-07-15 | 北京碧鑫水务有限公司 | 一种河道淤泥清除装置及清除方法 |
| CN114635470A (zh) * | 2022-04-18 | 2022-06-17 | 正中路桥建设发展有限公司 | 清淤疏浚装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100729864B1 (ko) | 준설선 | |
| CN106193153B (zh) | 一种绞吸挖泥船 | |
| JP3763789B2 (ja) | 浮泥除去システム | |
| CA3018137C (en) | Dredging apparatus and method of dredging | |
| JP2005240529A (ja) | 泥土浚渫装置 | |
| WO2018178088A1 (en) | Autonomus dredging underwater device | |
| KR200425184Y1 (ko) | 준설선 | |
| JP2010037827A (ja) | 浮遊物の集塵カゴ及びそれを使用した集塵システム | |
| JP6674672B2 (ja) | ポンプ浚渫船の汚濁拡散抑制装置及び汚濁拡散抑制方法 | |
| KR100947078B1 (ko) | 바지선과 수중로봇을 이용하여 개펄과 패각 등을 제거하는 준설장치 | |
| US6038795A (en) | Dredger with lockable rear door | |
| KR100508886B1 (ko) | 수중 오니제거 로보트 | |
| JP3569461B2 (ja) | 浚渫用クラムシェルバケット | |
| CN111236343A (zh) | 清淤装备及其清淤船 | |
| CN116122375A (zh) | 一种水利工程清淤装置 | |
| US2153557A (en) | Combination dredging, drilling, and pile-driving equipment | |
| JP2012149516A (ja) | 水面清掃装置、水面清掃用クラムシェルバケット、および水面清掃方法 | |
| KR20100053718A (ko) | 복수개의 스퍼드장치가 구비된 준설선 | |
| JP2001214879A (ja) | 掘削機能を備えた水中ポンプ用採泥ストレーナー。 | |
| US10519625B2 (en) | Dredger actuated from land | |
| JP2858227B2 (ja) | 浚渫船の集泥方法とその装置 | |
| CN2537741Y (zh) | 水域环保开闭清淤机 | |
| JP3363303B2 (ja) | 浚渫装置 | |
| JP2000282505A (ja) | 高濃度浚渫装置 | |
| JP2005201021A (ja) | 泥土浚渫方法と浚渫装置 |