JP2005181097A - 超音波流体計測装置 - Google Patents
超音波流体計測装置 Download PDFInfo
- Publication number
- JP2005181097A JP2005181097A JP2003422003A JP2003422003A JP2005181097A JP 2005181097 A JP2005181097 A JP 2005181097A JP 2003422003 A JP2003422003 A JP 2003422003A JP 2003422003 A JP2003422003 A JP 2003422003A JP 2005181097 A JP2005181097 A JP 2005181097A
- Authority
- JP
- Japan
- Prior art keywords
- time
- ultrasonic
- fluid
- measurement
- reception
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/028—Material parameters
- G01N2291/02836—Flow rate, liquid level
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/028—Material parameters
- G01N2291/02845—Humidity, wetness
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/028—Material parameters
- G01N2291/02872—Pressure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/028—Material parameters
- G01N2291/02881—Temperature
Landscapes
- Measuring Volume Flow (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Abstract
【解決手段】一方のトランスデューサから超音波を発射した後、所定の時間が経過するまでを禁止期間とし、この禁止期間では、ゼロクロス点の特定を禁止する。ゼロクロス点は、禁止期間が経過した後の受信波形Wrから特定する。禁止期間は、想定されるSN比を基準とし、かつ直接伝搬波以外の干渉波の影響により受信波形Wrに減衰が生じる期間を外して設定する。特定の禁止は、禁止期間における受信波形Wrの入力自体を禁止したり、受信波形Wrを入力してゼロクロス点を内部的に特定するものの、その出力を禁止することによる。
【選択図】 図4
Description
すなわち、水素ガス等を被験流体とする場合は、発射された超音波が受信側のトランスデューサに到達するまでに大きく減衰する。このため、トランスデューサ出力の超音波成分が小さくなる一方、これに重畳するノイズ成分が相対的に大きくなることである。このため、トランスデューサの出力電圧としきい値との比較による上記の方法では、本来のゼロクロス点よりも前に偶発的に大きなノイズを入力し、出力電圧がしきい値に達したときに、その時点で誤ったゼロクロス点(本来のゼロクロス点よりも早い。)が特定されることになる。他方、これを回避するため、ノイズ成分に対する余裕を持たせて大きなしきい値を設定した場合は、超音波の減衰の程度やノイズの大きさ次第で、本来のゼロクロス点を特定し損なうことが考えられる。ゼロクロス点の特定を誤った場合は、流量等の計測結果において、超音波の周波数に応じた大きな誤差を来すことになる。
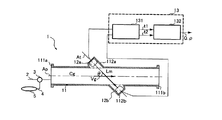
図1は、本発明の第1の実施形態に係る超音波流体計測装置(以下「計測装置」という。)1の構成を示している。本実施形態では、水素ガスを被験流体としている。
測定管11は、流量等の計測用通路を形成しており、軸方向の各端に形成されたフランジ111a,111bを介し、隣接する配管2に接続されている。配管2には、方向切換弁3が介装されており、測定管11は、この方向切換弁3により配管2と、他の配管4とに選択的に接続されるように構成されている。他の配管4には、校正流体としての窒素ガスを充填したタンク5が接続されており、タンク5内の窒素ガスを測定管11に流通させることができる。
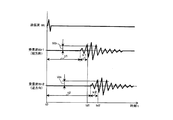
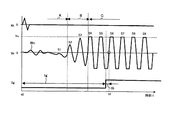
図2は、超音波の送信波形Wt及び受信波形Wr1,Wr2を示している。上流側トランスデューサ12aから流れに対して順方向に超音波Wtを発射した場合に得られる受信波形をWr1とし、下流側トランスデューサ12bから流れに対して逆方向に超音波Wtを発射した場合に得られる受信波形をWr2としている。超音波Wtが発射された後、受信信号(電圧で示す。)が所定のレベルVthに達する時点を受信時点tdとし、受信側のトランスデューサにより先頭の超音波(以下「先頭波」という。)が受信されてから前記受信時点tdまでの時間を検知遅れ時間trとし、超音波Wtが発射されてから先頭波が受信側のトランスデューサに到達するまでの時間を伝搬時間tとする。水素ガスの音速及び流速、並びに超音波Wtの伝搬距離をCg,Vg,Lmとすると、超音波Wtを順方向に発射したときと、超音波Wtを逆方向に発射したときとで、これらの時刻td及び時間tr,tの間には、次式(1)、(2)の関係が成り立つ。
=Lm/(Cg+Vg×cosθ)+tr1 ・・・(1)
td2=t2+tr2
=Lm/(Cg−Vg×cosθ)+tr2 ・・・(2)
流量Qを計測する場合は、(1)及び(2)式をもとに、流速Vgに関する下式(3)を得る。
(3)式により算出した流速Vgを次式(4)に代入し、流量Qを算出する。なお、測定管11の断面積をAとし、測定管11における流速分布補正係数をKとする。
Q=Vg×A×K ・・・(4)
他方、密度ρを計測する場合は、次式(5)により音速Cgを算出する。
(5)式により算出した音速Cgを次式(6)に代入し、密度ρを算出する。なお、比熱比をγとし、ガス定数をRとし、温度をTとする。
ρ=γ×{R×T/(22.4×Cg2)} ・・・(6)
なお、本実施形態では、超音波伝搬線Atを直線状に設定し、一対のトランスデューサ12a,12bを、管軸Apを基準とした測定管11の各側に配置している。しかしながら、本発明によれば、このような配置に限らず、超音波伝搬線Atを管壁上で屈曲させて設定することで、双方のトランスデューサを測定管11の片側のみに配置することもできる。
方向切換部131aは、一方のトランスデューサ(例えば、上流側トランスデューサ12a)を送信用に選択するとともに、他方の下流側トランスデューサ12bを受信用に選択する。
伝搬時間算出部131fは、入力した経過時間tdと、所定の検知遅れ時間trとをもとに、次式(7)により伝搬時間tを算出する。伝搬時間算出部131fは、算出した伝搬時間tを流量演算部132に出力する。なお、検知遅れ時間trは、検知遅れ時間記憶部131gに記憶されており、伝搬時間算出部131fに読み込まれる。検知遅れ時間trは、後述する校正処理に従い更新される。
流量演算部132は、入力した伝搬時間tをもとに、(3)〜(6)式により水素ガスの流量Q及び密度ρを算出する。
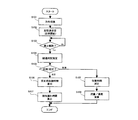
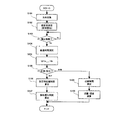
次に、コントロールユニット13の動作について、図5に示すフローチャートにより説明する。
S101では、超音波の伝搬方向を切り換える。
S102では、送信用のトランスデューサから超音波を発射するとともに、経過時間tdの計時を開始する。
S104では、ゼロクロス点C'を特定するとともに、特定したゼロクロス点C'の時刻tdをもとに、経過時間tdを測定する。
S106では、窒素ガスの音速に応じた校正用伝搬時間を(1)式により算出する。なお、校正流体の流量Vgは、配管4に簡易なセンサを設置し、このセンサにより検出する。また、窒素ガスや水素ガス等の単一組成のガスを校正流体とする場合は、音速Cgは、比熱比をγとし、ガス定数をRとし、温度をTとし、モル質量をMとして、次式(8)により算出する。
S107では、測定した経過時間tdから算出した校正用伝搬時間を減算して、検知遅れ時間trを算出する。校正では、超音波を複数回発射し、発射毎に測定した経過時間を平均して得たものを経過時間tdとするとよい。算出した検知遅れ時間trは、検知遅れ時間記憶部131gに記憶する。校正を終えると、スイッチが切り換わり、測定管11に水素ガスが流通する。
S109では、算出した伝搬時間tをもとに、(3)〜(6)式により水素ガスの流量Q及び密度ρを算出する。
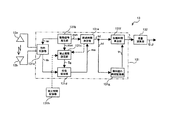
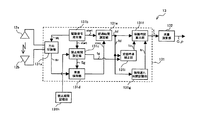
次に、コントロールユニット13を構成する各ブロック131a〜131hについて、詳細に説明する。
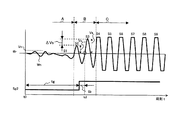
図6は、禁止期間として、受信波形Wrが定常化するまでの期間A及びBを採用した場合を示している。受信波形Wrは、トランスデューサ12a,12bの振動子の作動特性に応じ、超音波の圧力を受けて先頭波S1から周期毎に振幅が徐々に増加していき、やがて最大振幅に達して定常化する(期間C)。受信波形Wrの振幅が最大となる期間Cで受信時点(すなわち、ゼロクロス点)の特定を許可することで、本来のゼロクロス点よりも前に誤ったゼロクロス点が特定されることを回避するとともに、ゼロクロス点の特定が許可された後は、ノイズ成分Wnに対して最大のSN比が得られ、ゼロクロス点を正確に特定することができる。なお、禁止期間には、ゼロクロス点に対する余裕時間tbが設けられる。
このルーチンは、電源の投入により開始され、その後、所定の時間毎に実行される。開始後、初期設定が行われるとともに、超音波の伝搬方向を切り換え(S101)、送信用のトランスデューサから超音波を発射する(S102)。禁止期間が経過して、ゼロクロス点の特定が許可されたときは(S103)、S104へ進み、ゼロクロス点C'を特定するとともに、経過時間tdを測定する。S201では、順及び逆方向のそれぞれについて測定した経過時間td1,td2を平均して、経過時間平均値taを算出し、算出した平均値ta(=tan-1)から所定の余裕時間tbを減算して、禁止期間の長さtgを算出する。経過時間平均値taは、メモリーc101に記憶され、次回の計測において、このステップで読み込まれる。校正時であるか、計測時であるかを判定し(S105)、校正時では、校正流体の音速に応じた校正用伝搬時間を算出するとともに(S106)、検知遅れ時間trを算出し、記憶する。計測時では、測定した経過時間tdから検知遅れ時間trを減算して、伝搬時間tを算出するとともに(S108)、算出した伝搬時間tをもとに、(3)〜(6)式により水素ガスの流量Q等を算出する(S109)。
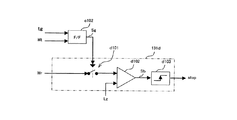
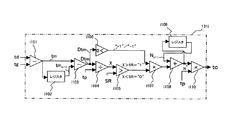
図11は、受信検知部131dの構成を示している。受信検知部131dは、スイッチd101を含んで構成され、スイッチd101は、トランスデューサの受信信号Wrに対するゲートを構成している。受信信号Wrは、スイッチd101を介してコンパレータd102に入力される。禁止期間設定部131cには、トランスデューサの駆動信号及び禁止期間の長さtgに応じて入力状態が切り換えられるフリップフロップc102が設けられており、スイッチd101は、フリップフロップd101の出力(すなわち、受信制御信号Sg)により作動する。トランスデューサとコンパレータd102とは、受信制御信号SgがHiレベルであるときに、スイッチd101がオンして接続され、Loレベルであるときに、スイッチd101がオフして遮断される。このため、禁止期間では、コンパレータd102への受信信号Wrの入力自体が阻止されることになる。コンパレータd102は、受信波形Wrのゼロレベルを基準として、各ゼロクロス点でレベルが遷移する矩形波形Sbを出力する(図4)。禁止期間に受信信号Wrの入力が阻止されることで、コンパレータd102の出力Sbは、禁止期間が経過するまでの間、ゼロレベルを保つ。コンパレータd102の出力Sbは、単安定マルチバイブレータd103に入力され、単安定マルチバイブレータd103は、ゼロクロス点として、矩形波形Sbの最初の立ち上がり点C'を特定し、計時停止信号stopを出力する。
検知遅れ時間記憶部131gは、校正時に算出した検知遅れ時間trを記憶する(S106,107)。記憶されている検知遅れ時間trは、計測時において、伝搬時間算出部131fに読み込まれる。
なお、校正時において、測定管11に校正流体を充填するだけとし、流量Vgをゼロとすれば、校正流体の流量Vgを検出するための特別なセンサが不要となるため、コストを削減することができる。
校正流体の音速Cgは、温度に対する依存性があり、加湿されたものでは、圧力(すなわち、湿度)に対する依存性が大きい。このため、校正流体の温度及び圧力を検出し、(8)式に対し、検出した温度Tと、圧力による補正後のモル質量Mとを代入することで、正確な校正用伝搬時間、延いては検知遅れ時間trを算出することができる。
まず、(6)式を変形した次式(10)により校正流体及び被験流体の各音速Cgc,Cgmを算出する。
Cg=√{γ×R×T/(22.4×ρ)} ・・・(10)
次に、校正流体の音速Cgcに応じた校正用伝搬時間を次式(11)、(12)により算出する。
t2c=Lm/(Cgc−Vg×cosθ) ・・・(12)
以上のようにして算出した音速Cgc,Cgm及び伝搬時間t1c,t2cをもとに、次式(13)、(14)により検知遅れ時間tr1,tr2を算出する。なお、記号tdは、計測時において、被験流体毎に得られる経過時間である。
tr2=td2−t2c×Cgc/Cgm ・・・(14)
このようにすれば、校正により得られた音速Cgc及び校正用伝搬時間t1c,t2cを記憶しておくことで、被験流体を切り換えたときは、(13)、(14)式に音速Cgmを代入するだけで、簡単に検知遅れ時間trを算出することができる。また、水素ガスを被験流体とする場合は、工場等において、取扱いが容易な窒素ガスを用いて校正を済ませておき、計測プラントでは、水素ガスの音速Cgmが必要となるだけで、流通ガスの切換えを伴う校正自体は不要となり、方向切換弁3等も不要となることから、校正を簡素化し、計測装置1の安全性を向上させることができる。なお、音速Cgは、演算によるばかりでなく、別に測定して得ることもできる。
tr=n×(1/2)×Tp ・・・(15b)
次に、本発明の他の実施形態について説明する。
図15は、本実施形態に係る計測装置のうち、コントロールユニット13の構成を示している。同図において、先の実施形態のものと同様に動作するブロックには、図3におけると同じ符号を付している。なお、測定管11、トランスデューサ12a,12b等、コントロールユニット13以外の要素は、先の実施形態のものと同様である。
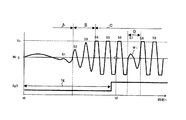
ここで、経過時間tdの変化に生じる折り返しについて、図16に示すタイムチャートにより説明する。同図において、受信波形Wrは、順方向に超音波を発射した場合のものを示している。
受信波形Wrのうち、4周期目の波S4を対象とし、その減少方向のゼロクロス点Fを特定する場合を考える。まず、1回目の計測において、受信制御信号Sgが4周期目の波S4に対応する点HでHiレベルに切り換えられ、ゼロクロス点Fの特定が許可されている。矩形波形Sbは、許可が下りるとともにHiレベルに遷移し、その後のゼロクロス点FでLoレベルに遷移している。このため、矩形波形Sbのうち、最初の立ち下がり点Iを検出することで、正しいゼロクロス点Fを特定することができる。次の計測では、流量Qが増大し、受信波形Wrの位相が点線で示すように早まっているとする。流量Qが増大する場合は、その変化量に応じて経過時間tdが短くなるのが通常である。ところが、流量Qの変化が急激であり、受信制御信号SgがHiレベルに切り換えられる点Hが本体のゼロクロス点F'よりも遅くなったとすると、4周期目の波S4に対応する点Hでゼロクロス点の特定が許可されるものの、矩形波形Sbの最初の立ち下がり点Jは、次の5周期目の波S5に対応することとなるため、測定された経過時間td'に1周期分の誤差が含まれることになる。このように経過時間tdが本来の方向とは逆に変化することを、折り返しという。
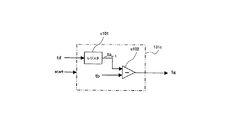
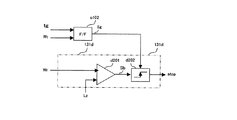
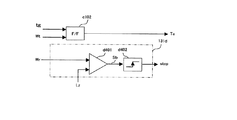
図18は、他の受信時点補正部131iの構成を示している。減算器i201は、経過時間td及び禁止期間の長さtgを入力し、これらの差tm(=td−tg)を算出する。
図19は、本来のゼロクロス点Fの時刻tsに対する差tmの変化を示すタイムチャートである。差tmは、時刻tsに応じ、0から超音波の周期tpの間で変化する。既述の通り、流量Qの増大等により受信波形Wrの位相が早まり、本来のゼロクロス点Fの時刻tsが早まると、経過時間tdと禁止期間の長さtgとの差tmは、時刻tsの変化に比例して小さくなる。時刻tsが大きく変化し、ゼロクロス点Fが点Hよりも前の時点となると、波s4を対象としてゼロクロス点F'を特定することができなくなり、次の波s5のゼロクロス点Gが特定されることになる(図16)。このため、差tmは、点Hの時刻tgで0からtpに切り換わり、時刻tpの減少に応じて更に変化することとなるため、結果として、時刻tsに対して鋸歯状の波形を描くこととなる。ここで、本来のゼロクロス点が点Fから点F'に遷移した場合を考えると、ゼロクロス点Fの変化とともに差tmがtm1からtm2に変化することとなるが(図16)、その変化の過程で、時刻tgにおいて、差tmがtpに切り換わり、経過時間tdが本来の方向とは逆に変化する折り返しが生じることになる(図19)。以下、本来のゼロクロス点が点Fから点F'に遷移した場合を例に説明する。
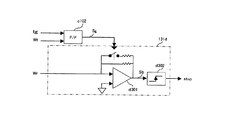
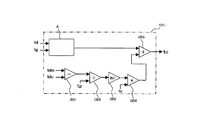
図20は、更に別の受信時点補正部131iの構成を示している。この受信時点補正部131iは、以上で述べた受信時点補正部Aに対し、ブロックi301〜i305を付加したものである。減算器i301は、校正時に得られた経過時間tdcと、計測開始時に得られる経過時間tdmとを入力し、これらの差Dtd(=tdm−tdc)を算出する。除算器i302は、差Dtdを入力し、超音波の周期tpで除算する。整数変換器i303は、その商(=Dtd/tp)を入力し、1未満の位を切り捨てた整数値に変換する。乗算器i304は、この整数値に周期tpを乗算し、時間を単位とする初期補正量tc0を算出する。加算器i305は、ブロックAから出力された周期補正量tcに初期補正量tc0を加算し、これを最終的な周期補正量として伝搬時間算出部131fに出力する。この受信時点補正部131iにすれば、ブロックAにより経過時間の折り返しが補償されることに加え、校正ガスと被験ガスとで音速が大きく異なり、校正により設定された検知遅れ時間tcに超音波の1周期を超える誤差が含まれるとしても、これを補償し、計測当初から伝搬時間tを正確に測定することができる。なお、初期補正量tc0の符号は、校正ガスの音速に比べ、被験ガスの音速が大きいときは“−”であり、小さいときは“+”である。
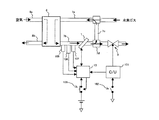
図21は、計測装置1を設置した燃料電池システムの構成を示している。
燃料電池6は、アノード側で燃料ガス供給管7a及び燃料ガス排出管7bと接続される一方、カソード側で酸化ガス供給管8a及び酸化ガス排出管8bと接続されている。燃料電池6には、燃料ガス供給管7aを介して水素ガスが供給され、酸化ガス供給管8aを介して空気が供給される。燃料ガス供給管7aと燃料ガス排出管7bとは、燃料ガス戻し管7cにより接続されており、アノードからの排出ガスの一部が燃料ガス供給管7aに戻されるように構成されている。戻される排出ガスの流量は、分岐部7dの下流に設置された流量制御弁9により調節される。流量制御弁9は、燃料電池6のコントロールユニット(以下「燃料電池C/U」という。)101により開度が制御される。分岐部7dの上流には、計測装置1が介装されており、計測装置1のコントロールユニット(以下「計測装置C/U」という。)13は、計測した排出ガスの流量Q及び密度ρを燃料電池C/U101に出力する。燃料電池C/U101は、入力した流量Q、密度ρ及び他の情報をもとに、流量制御弁9の開度を演算する。燃料ガス排出管7bには、計測装置1のほか、燃料ガス排出管7b内の圧力を検出する圧力センサ105、排出ガスの湿度を検出する湿度センサ106、及び排出ガスの温度を検出する温度センサ107が設置されており、これらの検出信号は、計測装置C/U13に出力される。計測装置C/Uは、トランスデューサ12a,12bの受信信号Wr及び入力した圧力等をもとに、排出ガスの流量Q及び密度ρを演算する。なお、燃料電池C/U101には、システム起動用のスイッチ102が設けられ、計測装置C/U13には、計測装置1のスイッチ135が設けられている。後者のスイッチ135は、計測装置C/U13からの指令信号により作動する。
システム起動用のスイッチ102にオンされと、これに連動してスイッチ135がオンされ、このルーチンが開始される。このルーチンは、所定の時間毎に実行される。このシステムでは、停止時において、燃料ガス供給管7a及び燃料ガス排出管7bに窒素ガスが充填される。スイッチ102がオンされると、このルーチンにより校正が行われ、検知遅れ時間trが更新される。更新が終了すると、燃料ガス供給管7aに水素ガスが供給されて、管内のガスが水素ガスに切り換えられ、燃料電池6の運転が開始される。燃料電池6の運転時において、計測装置1は、排出ガスの流量Q等を計測する。なお、スイッチ102を操作盤に設け、校正と計測との切換えを手動で行うようにしてもよい。
S301では、校正が終了しているか否かを判定する。スイッチ135がオンされた直後であり、校正が終了していないときは、S106へ進み、図5に示すフローチャートにおけると同様に校正用伝搬時間を算出し(S106)、検知遅れ期間trを算出し、更新する(S107)。校正が終了し、燃料電池6の運転が開始されているときは、S108ヘ進み、伝搬時間tを測定し(S108)、流量Q等を演算する(S109)。
なお、システムを起動する際に、校正の終了を待たずに水素ガスの供給を開始し、水素ガスにより校正を行うこととしてもよい。この場合は、校正時に加湿を行わず、乾燥した純粋な水素ガスを燃料ガス排出管7bに充填又は流通させることで、校正ガスの音速Cgcを正確に算出することができる。このようにすれば、校正が終了した後、燃料電池6の運転を開始させる際に、管内が水素ガスに既に切り換えられている状態にあるため、燃料電池6からの出力を早期に得ることができる。
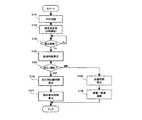
図23は、故障診断機能を備える計測装置C/U13の動作を示すフローチャートである。このルーチンは、システム起動用のスイッチ135がオンされることにより開始され、所定の時間毎に実行される。このルーチンでは、故障診断機能によりアノード側の配管(測定管11、燃料ガス供給管7a及び燃料ガス排出管7bを含む。)に生じた漏れを検知し、運転者にその認識を促す。
S401では、システムの運転状態を判定する。起動時はS106へ、運転時はS108へ、停止時はS402へ進む。
停止時において、S402では、加湿を停止するとともに、校正時と同じ水素ガスの流量が得られる状態に設定し、管内の流れが定常化するまで待機する。定常化したときは、S403へ進む。定常化したか否かは、流量Q又は密度ρを算出するとともに、その演算周期毎の変化量と所定の値とを比較することで、判定することができる。また、燃料ガス排出管7b内の温度、圧力又は湿度の経時変化を監視したり、スイッチ135がオフされてからの時間を監視することで、簡易に判定することもできる。
起動時において、S106,107では、図5に示すフローチャートを同様の処理を行い、校正用伝搬時間及び検知遅れ時間trを算出し、これを記憶する。
S404では、停止時伝搬時間と校正用伝搬時間との間に所定の値以上の差があるか否かを判定する。差があるときは、S405に進み、差がないときは、このルーチンをそのまま終了する。
以上に述べたように、本発明によれば、超音波が発射された後、禁止期間が経過するまではゼロクロス点の特定を禁止し、その後にゼロクロス点を特定するようにしたので、ノイズ等の影響で、本来のゼロクロス点よりも前に誤ったゼロクロス点が特定されるのを防止することができる。
Claims (25)
- 被験流体を流通させる測定管と、
測定管を横断させて設定した超音波伝搬線上に設置され、流れに対して順方向に超音波を発射する第1のトランスデューサと、
超音波伝搬線上に、第1のトランスデューサよりも下流に設置され、流れに対して逆方向に超音波を発射する第2のトランスデューサと、
第1又は第2のトランスデューサから発射された超音波を受信したトランスデューサの出力が所定のレベルに達する時点を受信時点として特定する受信時点特定手段と、
特定された受信時点をもとに、第1又は第2のトランスデューサから発射された超音波の、受信側のトランスデューサまでの各伝搬時間を測定する伝搬時間測定手段と、
測定された各伝搬時間をもとに、被験流体に関する所定の演算を行う演算手段と、
第1又は第2のトランスデューサから超音波が発射された後、所定の時間が経過するまでの禁止期間において、受信時点特定手段による受信時点の特定を禁止する受信時点特定禁止手段と、を含んで構成される超音波流体計測装置。 - 伝搬時間測定手段は、超音波の送信時点から特定された受信時点までの経過時間から、所定の検知遅れ時間を減算して、各伝搬時間を測定する請求項1に記載の超音波流体計測装置。
- 検知遅れ時間は、トランスデューサの出力波形の1周期又は半周期の整数倍の長さである請求項2に記載の超音波流体計測装置。
- 測定管に対し、被験流体に代えて音速が既知である校正流体を流通又は充填可能に構成され、
伝搬時間測定手段は、測定管に校正流体が流通し又は充填されているときに特定される受信時点及び送信時点の間の時間と、校正流体の音速をもとに得られる校正用伝搬時間との差を算出する手段と、算出した差を検知遅れ時間として記憶する手段と、を含んで構成される請求項2に記載の超音波流体計測装置。 - 伝搬時間測定手段は、校正流体と被験流体との音速の比を算出する手段と、校正流体の音速に応じた伝搬時間に算出した比を乗算して、校正用伝搬時間を算出する手段と、を更に含んで構成される請求項4に記載の超音波流体計測装置。
- 伝搬時間測定手段は、校正流体の温度を検出する手段と、検出した温度をもとに、校正流体の音速を補正する手段と、を更に含んで構成される請求項4又は5に記載の超音波流体計測装置。
- 伝搬時間測定手段は、校正流体の湿度を検出する手段と、検出した湿度をもとに、校正流体の音速を補正する手段と、を含んで構成される請求項4〜6のいずれかに記載の超音波流体計測装置。
- 計測開始時に特定された受信時点の、校正時に特定された受信時点に対する第1の変動率を算出するとともに、算出した第1の変動率が所定の値以上であるときに、算出した変動率に応じた検知遅れ時間の補正を行う手段を更に含んで構成される請求項4〜7のいずれかに記載の超音波流体計測装置。
- 被験流体の所定の流量を得るための条件のもと、測定管内の流れが定常状態にあることを判定する手段と、
測定管内の流れが定常状態にあると判定されたときに伝搬時間測定手段により測定された伝搬時間と、校正用伝搬時間とをもとに、測定管からの流体の漏れを検出する手段と、を更に含んで構成される請求項4〜8のいずれかに記載の超音波流体計測装置。 - 禁止期間を定める所定の時間は、トランスデューサの出力波形における振幅の周期毎の変化量が所定の値以下となるまでの時間である請求項1〜9のいずれかに記載の超音波流体計測装置。
- 禁止期間を定める所定の時間は、トランスデューサの出力波形における振幅の周期毎の変化量が、超音波の到達前に重畳したノイズの振幅よりも大きくなるまでの時間である請求項1〜9のいずれかに記載の超音波流体計測装置。
- 禁止期間は、トランスデューサの出力波形に対し、超音波伝搬線上を伝搬した超音波以外の超音波が干渉するものとして予め設定した所定の時間帯を外した期間である請求項1〜11のいずれかに記載の超音波流体計測装置。
- 前記所定の時間として、第1の時間と、これよりも長い第2の時間とが設定され、
受信時点特定禁止手段に対し、第1及び第2の時間の間で前記所定の時間を切り換えて設定する手段を更に含んで構成される請求項1〜12のいずれかに記載の超音波流体計測装置。 - 前記設定手段は、この装置の操作者が前記所定の時間を手動で切り換えるための手段を含んで構成される請求項13に記載の超音波流体計測装置。
- 超音波の送信時点から特定された受信時点までの経過時間を計測毎に測定するとともに、今回の計測に際し、前記所定の時間として、前回の計測で測定した経過時間から所定の余裕時間を減算した時間を設定する手段を更に含んで構成される請求項1〜12のいずれかに記載の超音波流体計測装置。
- 前記経過時間は、第1及び第2のトランスデューサから発射された各超音波について測定された経過時間を平均したものである請求項15に記載の超音波流体計測装置。
- 前記所定の時間は、超音波の送信時点から、最大流量時に受信時点特定手段により特定される、順方向に発射された超音波の受信時点よりも所定の時間前の時点までの時間である請求項1〜16のいずれかに記載の超音波流体計測装置。
- 受信時点特定禁止手段は、禁止期間において、受信時点特定手段へのトランスデューサ出力の入力を遮断する請求項1〜17のいずれかに記載の超音波流体計測装置。
- 受信時点特定禁止手段は、禁止期間にトランスデューサ出力が所定のレベルに達した場合に、その時点を受信時点とする特定を禁止する請求項1〜17のいずれかに記載の超音波流体計測装置。
- トランスデューサ出力の増幅率として、第1の増幅率と、これよりも大きい第2の増幅率とが設定され、
受信時点特定禁止手段は、前記所定の時間が経過する前後で前記増幅率を切り換え、経過前に第1の増幅率を、経過後に第2の増幅率を設定する請求項1〜17のいずれかに記載の超音波流体計測装置。 - 受信時点特定手段は、トランスデューサ出力を前記所定のレベルを基準として2値化する手段を含んで構成され、2値化した結果をもとに、受信時点を特定する請求項1〜20のいずれかに記載の超音波流体計測装置。
- 特定された受信時点の予め設定された基準時点に対する第2の変動率を算出するとともに、算出した第2の変動率が所定の値以上であるときに、伝搬時間測定手段に対し、算出した変動率に応じた受信時点の補正を行う手段を更に含んで構成される請求項1〜21のいずれかに記載の超音波流体計測装置。
- 前回の計測までに特定された少なくとも1つの受信時点の平均時点を算出し、算出した平均時点を前記基準時点に設定する手段を更に含んで構成される請求項22に記載の超音波流体計測装置。
- 演算手段は、測定された各伝搬時間をもとに、被験流体の流量又は濃度を算出する請求項1〜23のいずれかに記載の超音波流体計測装置。
- 被験流体は、燃料電池のアノード配管を流れる燃料ガスである請求項1〜24のいずれかに記載の超音波流体計測装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003422003A JP2005181097A (ja) | 2003-12-19 | 2003-12-19 | 超音波流体計測装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003422003A JP2005181097A (ja) | 2003-12-19 | 2003-12-19 | 超音波流体計測装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005181097A true JP2005181097A (ja) | 2005-07-07 |
Family
ID=34783003
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003422003A Withdrawn JP2005181097A (ja) | 2003-12-19 | 2003-12-19 | 超音波流体計測装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005181097A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008149868A1 (ja) * | 2007-05-31 | 2008-12-11 | Teijin Pharma Limited | 超音波式ガス濃度測定方法及びそれを用いた装置 |
| CN103874920A (zh) * | 2011-10-06 | 2014-06-18 | 韦斯全球有限公司 | 外壁附着型超声波浓度测量系统及其方法 |
| CN110068387A (zh) * | 2018-01-24 | 2019-07-30 | 安东帕有限责任公司 | 确定待检查的液体中的取决于粘性的声速的修正值的方法 |
-
2003
- 2003-12-19 JP JP2003422003A patent/JP2005181097A/ja not_active Withdrawn
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008149868A1 (ja) * | 2007-05-31 | 2008-12-11 | Teijin Pharma Limited | 超音波式ガス濃度測定方法及びそれを用いた装置 |
| JP4988839B2 (ja) * | 2007-05-31 | 2012-08-01 | 帝人ファーマ株式会社 | 超音波式ガス濃度測定方法及びそれを用いた装置 |
| US8746037B2 (en) | 2007-05-31 | 2014-06-10 | Teijin Pharma Limited | Ultrasonic apparatus and method for measuring the concentration of gas |
| CN103874920A (zh) * | 2011-10-06 | 2014-06-18 | 韦斯全球有限公司 | 外壁附着型超声波浓度测量系统及其方法 |
| JP2014528582A (ja) * | 2011-10-06 | 2014-10-27 | ウェス グローバル インコーポレーテッドWess Global, Inc. | クランプオン型超音波濃度測定システム及び方法 |
| CN110068387A (zh) * | 2018-01-24 | 2019-07-30 | 安东帕有限责任公司 | 确定待检查的液体中的取决于粘性的声速的修正值的方法 |
| JP2019128356A (ja) * | 2018-01-24 | 2019-08-01 | アントン パール ゲゼルシャフト ミット ベシュレンクテル ハフツングAnton Paar GmbH | 被検流体中の粘度依存性の音響速度に対する補正値を決定するための方法 |
| JP7292885B2 (ja) | 2018-01-24 | 2023-06-19 | アントン パール ゲゼルシャフト ミット ベシュレンクテル ハフツング | 被検流体中の粘度依存性の音響速度に対する補正値を決定するための方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6625549B1 (en) | Equipment specifying system | |
| CN104105952B (zh) | 用于校正偏移的设备及方法 | |
| JP3732642B2 (ja) | 超音波液位計測装置 | |
| JP2005241546A (ja) | ドップラー式超音波流量計、その演算処理装置、プログラム | |
| US10564017B2 (en) | Ultrasonic flowmeter and method using partial flow measurements | |
| JP2007187506A (ja) | 超音波流量計 | |
| US6766276B1 (en) | Method and device for detecting a dysfunction of an ulatrasonic flowmeter | |
| JP2005181097A (ja) | 超音波流体計測装置 | |
| JP5123469B2 (ja) | 超音波流量計 | |
| JP5434548B2 (ja) | 流速分布計測方法および流速分布計測装置 | |
| JP2006308439A (ja) | 流体の流れ計測装置 | |
| US20220074773A1 (en) | Method for Operating an Ultrasonic Flowmeter and Ultrasonic Flowmeter | |
| JP2005345256A (ja) | 超音波流体計測装置 | |
| JP3469405B2 (ja) | 温度計測装置 | |
| JP2007240220A (ja) | 超音波流体計測装置 | |
| JPH08271322A (ja) | 超音波液位測定法 | |
| JP2007192763A (ja) | 自律走行装置 | |
| JPS5826239A (ja) | 液漏洩位置の検出方法 | |
| JP2007024681A (ja) | 超音波流体計測装置 | |
| JP2010145213A (ja) | 流速または流量計測装置 | |
| US20210010840A1 (en) | Method of measuring the speed of a fluid | |
| JP2009031134A (ja) | 超音波流量計 | |
| KR20240095425A (ko) | 기체 농도 측정 장치 | |
| JP2001242000A (ja) | 超音波レベル計 | |
| EP4092393A1 (en) | Ultrasonic flow meter with estimation of a flow rate distribution |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061025 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20080319 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080331 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20090908 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091015 |