【0001】
【発明の属する技術分野】
本発明は、産業用ロボットの手首とアームの構造に関する。
【0002】
【従来の技術】
従来、産業用ロボットの手首装置として、2つの工具を搭載可能な構造がある(例えば、特許文献1参照)。この手首装置は、2つの手首先端を設け、駆動シャフトを4重に同軸上に配置して各手首先端の減速機を駆動している。このような構造は、駆動系に多数の複雑な部品を必要とし、また、軸構成に合わせて駆動系の部品形状が決まるため、軸構成を簡単に変更することができない。
【特許文献1】特開2002−36163号公報
【0003】
【発明が解決しようとする課題】
本発明は、手首装置やアームにおいて、複雑な構造を伴うことなく、軸を自由に構成し得る産業用ロボットの提供を目的とする。
【0004】
【課題を解決するための手段】
本発明による、アームと手首装置を有する産業用ロボットは、これらアームおよび手首装置の少なくとも1つの軸ユニットの駆動装置を、減速機構を一体に組み込んだ減速機一体モータで構成し、このモータで1つのブラケットを駆動し、このブラケットを、2つの減速機一体型モータを搭載可能に形成することを特徴とする。
この構成では、軸ユニットの駆動系は減速機一体型モータの独立したモジュールであり、別途に駆動機構の設置を要さず、軸ユニットの構造が簡単である。また、この駆動系が動かすブラケットには2つの別の駆動系を搭載して、多彩な軸構成を簡単に実現し得るので、ロボットアームならびに手首を自由に構成することができる。
【0005】
上述のモータは防滴構造であることが好ましい。こうすることによって、ロボットアームおよび手首には、防滴手段を別途設ける必要がなく、構造がさらに簡単になる。
【0006】
【発明の実施の形態】
本発明の実施の形態を、図1〜図4を参照して説明する。なお、これら図面においては、同様な構成部分に同じ参照符号を付して説明を省略する。
図1は本発明による産業用ロボットの要部を示し、この例では、手首装置6を本発明に従って構成して、2つのエンドエフェクタを搭載可能にしている。
【0007】
手首装置6は、アーム7の先端に取り付けられていて、第1の軸ユニット1と、第1軸ユニットにつながった第2の軸ユニット2と、第2軸ユニットにつながった第3の軸ユニット3とを有する。手首装置2にはさらに、第2軸ユニット2と並列に設置した第4の軸ユニット4と、第4軸ユニットにつながった第5の軸ユニットとを設けている。
これら第1〜第5の軸ユニットはそれぞれ、減速機構を一体に組み込んだ減速機一体型モータ1a,2a,3a,4a,5aを備え、これらモータをブラケット2b,3b,5bを用いて連結している。
【0008】
第1軸ユニットのモータ1aは、その固定側部分をアーム7の先端にボルト付けされている。ブラケット2bは断面がコ字形状であり、コ字の縦棒となる中央部分をモータ1aの減速機構出力軸にボルト付けしている。ブラケット2bの、コ字の上横棒となる一端部には、第2軸ユニットのモータ2aの固定側部分がボルト付けされている。さらに、このモータ2aの減速機構出力軸に、L字形状のブラケット3bの一端部をボルト付けし、ブラケット3bの他端部には、第3軸ユニットのモータ3aの固定側部分をボルト付けしている。
かくして、第1〜第3軸ユニットは、順次に互いに直交するように配置され、全体として、図1に示すようなオフセット手首を構成する。
【0009】
一方、第2軸ユニットのブラケット2bの、コ字の下横棒となる他端部にも、第4軸ユニットのモータ4aの固定側部分がボルト付けされている。さらに、このモータ4aの減速機構出力軸に、L字形状のブラケット5bの一端部をボルト付けし、ブラケット5bの他端部には、第5軸ユニットのモータ5aの固定側部分をボルト付けしている。
かくして、第1、第4および第5軸ユニットも、順次に互いに直交するように配置され、全体として、図1に見られるような第2のオフセット手首を構成している。
第3と第5軸ユニットの先端、すなわちモータ3aと5aの減速機構出力軸に、2つのエンドエフェクタをそれぞれ取り付けることができる。
【0010】
図2に示す実施態様も、本発明を手首装置8に適用している。手首装置8は、図1の例と同様な第1軸ユニット1、第2軸ユニット2、第4軸ユニット4、そして第5軸ユニット5を備えており、アーム7に回動可能に取り付けている点も図1の例と同じである。
図2の手首装置8は、第3の軸ユニット9の取付方向が図1の例とは違っている。第3軸ユニットの減速機一体型モータ9aは、このモータを第2軸ユニットのモータにつなぐL字形状のブラケット9bの向きが、図1の例とは逆で、内向きである。
このように、この実施形態は、第1〜第3軸ユニットがインライン手首を、第1軸ユニット、第4軸ユニット、第5軸ユニットがオフセット手首を成している。
【0011】
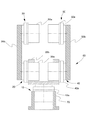
図3は、ロボットの垂直型アームを本発明に従って構成した例を示している。
図3のアーム60は、第1の軸ユニット10に旋回自在に支えられた2つのアーム部分をもつ形状を呈する。この例でも、各軸ユニットは駆動系となる減速機一体型モータと、これを支承するブラケットとから成るモジュール構成である。
旋回用の軸ユニット10はモータ10aを有し、該モータに、アーム全体の据え付け用の円筒状ベース70をボルト付けしている。
【0012】
この旋回モータ10aの減速機構出力軸に、図1と2の例と同様な、コ字形状のブラケット20bを固定している。このブラケットの両端部に、2つの減速機一体型モータ20a,20bが軸線を揃えて対向して取り付けられ、第2の軸ユニット20と、第4の軸ユニット40を成している。さらに、第2軸ユニットに、平板状のブラケット30bを介して、第3の軸ユニット30の減速機一体型モータ30aをつないで、一方のアーム部分を構成している。
他方のアーム部分も同様に、第4軸ユニット40に、平板形状のブラケット50bを用いて第5の軸ユニット50のモータ50aをつないで形成している。
【0013】
続いて、本発明のロボットに使用する減速機一体型モータの一例を、図5を参照して説明する。
図5に示す例は、モータ部101と、ハーモニックドライブ減速機構102と、鍔付き円筒状のケース109とを有する。
モータ部101は、従来のACモータと同様の構成であり、モータ部と同軸状の減速機構102と共に、モータの静止ないし固定側部分となるケース109内に配設している。
【0014】
減速機構102は、モータ部101の出力軸に連結したウェーブジェネレータ104と、それに隣接して軸受103で回転可能に支承した出力軸108と、ケース109の内周壁に形成したサーキュラスプライン105から成る。出力軸108は、ウェーブジェネレータ104とサーキュラスプライン105の間に入るフレクスプライン106を有し、これらの噛み合いを介して、モータ部101により駆動される。
【0015】
主軸受103はクロスローラ軸受であり、ラジアル荷重とスラスト荷重とモーメント荷重を同時に支持することができる。減速機一体型モータは、オイルシ−ル107などによって内部が密封され、防滴構造である。
なお、減速機一体型モータは、上述のハーモニックドライブ減速機のかわりに、例えば、RV減速機、サイクロ減速機、遊星歯車減速機など、その他の減速手段を用いても良い。主軸受は、クロスローラ軸受のかわりに、アンギュラ玉軸受、テーパコロ軸受など、その他の軸受を用いることができる。
【0016】
以上、本発明の実施態様を説明したが、本発明はこれら特定の形のみに限定されるものでなく、説明した形態を様々に変更し、或いは本発明を他の形態で実施することも可能である。
例えば、図1の手首装置を図3のアームと組み合わせてもよく、また、各モータにおける固定側部分と減速機機構出力軸との取付関係は、図示例とは逆であっても、同様な機能を得られる。
【0017】
【発明の効果】
本発明によると、簡単な構造で、アームや手首装置に複数の軸系統を自由に容易に設けることが出来る。よって、小型で汎用性に優れたアームと手首装置、ひいてはこれらを用いる産業用ロボットの安価な提供を可能にする効果がある。
【図面の簡単な説明】
【図1】本発明の実施態様である、2つのオフセット手首を呈する手首装置を備えたロボットの部分断面概略図である。
【図2】本発明の別の実施態様である、インラインとオフセットの2つの手首を成す手首装置を備えたロボットの部分断面概略図である。
【図3】本発明の別の実施態様である、2つのアーム部分をもつロボットアームの部分断面概略図である。
【図4】本発明のロボットに使用する減速機一体型モータの一例を示す部分断面図である。
【符号の説明】
1−5、9、10−50 軸ユニット
1a−5a、9a、10a−50a 減速機一体型モータ
2b、3b、5b、9b、20b、30b、50b ブラケット
6,8 手首装置
7 アーム
60 アーム
102 減速機構
108 出力軸[0001]
BACKGROUND OF THE INVENTION
The present invention relates to a wrist and arm structure of an industrial robot.
[0002]
[Prior art]
Conventionally, as a wrist device for an industrial robot, there is a structure in which two tools can be mounted (for example, see Patent Document 1). In this wrist device, two wrist tips are provided, and drive shafts are arranged on the same axis coaxially to drive the speed reducer at each wrist tip. Such a structure requires a large number of complex parts in the drive system, and the shape of the drive system parts is determined in accordance with the shaft structure, so that the shaft structure cannot be easily changed.
[Patent Document 1] Japanese Unexamined Patent Application Publication No. 2002-36163
[Problems to be solved by the invention]
An object of the present invention is to provide an industrial robot that can freely configure a shaft without a complicated structure in a wrist device or an arm.
[0004]
[Means for Solving the Problems]
An industrial robot having an arm and a wrist device according to the present invention comprises a drive device for at least one shaft unit of the arm and wrist device as a speed reducer integrated motor in which a speed reduction mechanism is integrally incorporated. One bracket is driven, and this bracket is formed so that two motors integrated with a reduction gear can be mounted.
In this configuration, the drive system of the shaft unit is an independent module of the reduction gear integrated motor, and no separate drive mechanism is required, and the structure of the shaft unit is simple. In addition, the bracket that this drive system moves can be equipped with two separate drive systems, and various axis configurations can be easily realized, so that the robot arm and the wrist can be freely configured.
[0005]
The motor described above preferably has a drip-proof structure. By doing so, it is not necessary to separately provide drip-proof means on the robot arm and wrist, and the structure is further simplified.
[0006]
DETAILED DESCRIPTION OF THE INVENTION
An embodiment of the present invention will be described with reference to FIGS. In these drawings, the same components are denoted by the same reference numerals, and the description thereof is omitted.
FIG. 1 shows an essential part of an industrial robot according to the present invention, and in this example, a wrist device 6 is constructed according to the present invention so that two end effectors can be mounted.
[0007]
The wrist device 6 is attached to the tip of the arm 7, and includes a first shaft unit 1, a second shaft unit 2 connected to the first shaft unit, and a third shaft unit connected to the second shaft unit. 3. The wrist device 2 is further provided with a fourth shaft unit 4 installed in parallel with the second shaft unit 2 and a fifth shaft unit connected to the fourth shaft unit.
Each of the first to fifth shaft units includes reduction gear integrated motors 1a, 2a, 3a, 4a, and 5a each incorporating a reduction gear mechanism, and these motors are connected using brackets 2b, 3b, and 5b. ing.
[0008]
The motor 1a of the first shaft unit has a fixed side portion bolted to the tip of the arm 7. The bracket 2b has a U-shaped cross section, and a central portion that is a U-shaped vertical bar is bolted to the output shaft of the speed reduction mechanism of the motor 1a. A fixed side portion of the motor 2a of the second shaft unit is bolted to one end of the bracket 2b, which is a U-shaped upper horizontal bar. Further, one end portion of the L-shaped bracket 3b is bolted to the output shaft of the reduction mechanism of the motor 2a, and the fixed side portion of the motor 3a of the third shaft unit is bolted to the other end portion of the bracket 3b. ing.
Thus, the first to third axis units are sequentially arranged so as to be orthogonal to each other, and constitute an offset wrist as shown in FIG. 1 as a whole.
[0009]
On the other hand, the fixed side portion of the motor 4a of the fourth shaft unit is also bolted to the other end portion of the bracket 2b of the second shaft unit, which is the U-shaped lower horizontal bar. Further, one end of the L-shaped bracket 5b is bolted to the output shaft of the reduction mechanism of the motor 4a, and the fixed side portion of the motor 5a of the fifth shaft unit is bolted to the other end of the bracket 5b. ing.
Thus, the first, fourth, and fifth axis units are also sequentially arranged so as to be orthogonal to each other, and constitute a second offset wrist as seen in FIG. 1 as a whole.
Two end effectors can be respectively attached to the tips of the third and fifth shaft units, that is, the output shafts of the speed reduction mechanisms of the motors 3a and 5a.
[0010]
The embodiment shown in FIG. 2 also applies the present invention to the wrist device 8. The wrist device 8 includes a first shaft unit 1, a second shaft unit 2, a fourth shaft unit 4, and a fifth shaft unit 5 similar to the example of FIG. 1, and is rotatably attached to the arm 7. This is the same as the example of FIG.
The wrist device 8 of FIG. 2 differs from the example of FIG. 1 in the mounting direction of the third shaft unit 9. In the third axis unit reduction gear integrated motor 9a, the direction of the L-shaped bracket 9b connecting the motor to the motor of the second axis unit is opposite to the example of FIG. 1 and is inward.
Thus, in this embodiment, the first to third axis units form an inline wrist, and the first axis unit, the fourth axis unit, and the fifth axis unit form an offset wrist.
[0011]
FIG. 3 shows an example in which a vertical arm of a robot is configured according to the present invention.
The arm 60 of FIG. 3 has a shape having two arm portions that are pivotally supported by the first shaft unit 10. Also in this example, each shaft unit has a module configuration including a reduction gear integrated motor as a drive system and a bracket for supporting the motor.
The turning shaft unit 10 has a motor 10a, and a cylindrical base 70 for mounting the entire arm is bolted to the motor 10a.
[0012]
A U-shaped bracket 20b similar to the example of FIGS. 1 and 2 is fixed to the output shaft of the speed reduction mechanism of the turning motor 10a. Two reducer-integrated motors 20 a and 20 b are attached to both ends of the bracket so as to face each other with the axis line aligned, thereby forming a second shaft unit 20 and a fourth shaft unit 40. Furthermore, the reduction shaft integrated motor 30a of the third shaft unit 30 is connected to the second shaft unit via a flat bracket 30b to constitute one arm portion.
Similarly, the other arm portion is formed by connecting the motor 50a of the fifth shaft unit 50 to the fourth shaft unit 40 using a flat bracket 50b.
[0013]
Next, an example of a reduction gear integrated motor used for the robot of the present invention will be described with reference to FIG.
The example shown in FIG. 5 includes a motor unit 101, a harmonic drive speed reduction mechanism 102, and a cylindrical case 109 with a flange.
The motor unit 101 has the same configuration as that of a conventional AC motor, and is disposed in a case 109 serving as a stationary or fixed side portion of the motor together with a reduction mechanism 102 coaxial with the motor unit.
[0014]
The speed reduction mechanism 102 includes a wave generator 104 connected to the output shaft of the motor unit 101, an output shaft 108 that is rotatably supported by a bearing 103 adjacent thereto, and a circular spline 105 formed on the inner peripheral wall of the case 109. The output shaft 108 has a flex spline 106 that enters between the wave generator 104 and the circular spline 105, and is driven by the motor unit 101 through these meshing.
[0015]
The main bearing 103 is a cross roller bearing and can simultaneously support a radial load, a thrust load, and a moment load. The reduction gear integrated motor is sealed with an oil seal 107 or the like and has a drip-proof structure.
The speed reducer-integrated motor may use other speed reducing means such as an RV speed reducer, a cyclo speed reducer, or a planetary gear speed reducer instead of the above-described harmonic drive speed reducer. As the main bearing, other bearings such as an angular ball bearing and a tapered roller bearing can be used instead of the cross roller bearing.
[0016]
Although the embodiments of the present invention have been described above, the present invention is not limited to these specific forms, and the described embodiments can be variously changed or the present invention can be implemented in other forms. It is.
For example, the wrist device of FIG. 1 may be combined with the arm of FIG. 3, and the mounting relationship between the fixed side portion and the reduction gear mechanism output shaft in each motor is the same as that shown in FIG. Get functionality.
[0017]
【The invention's effect】
According to the present invention, with a simple structure, a plurality of shaft systems can be freely and easily provided on an arm or wrist device. Therefore, there is an effect that it is possible to provide an inexpensive arm and wrist device that is small and versatile, and thus an industrial robot that uses them.
[Brief description of the drawings]
FIG. 1 is a partial cross-sectional schematic view of a robot provided with a wrist device having two offset wrists according to an embodiment of the present invention.
FIG. 2 is a partial cross-sectional schematic view of a robot having a wrist device having two wrists, inline and offset, according to another embodiment of the present invention.
FIG. 3 is a partial cross-sectional schematic view of a robot arm having two arm portions according to another embodiment of the present invention.
FIG. 4 is a partial cross-sectional view showing an example of a reduction gear integrated motor used in the robot of the present invention.
[Explanation of symbols]
1-5, 9, 10-50 Shaft unit 1a-5a, 9a, 10a-50a Reducer integrated motor 2b, 3b, 5b, 9b, 20b, 30b, 50b Bracket 6, 8 Wrist device 7 Arm 60 Arm 102 Deceleration Mechanism 108 Output shaft