JP2004505748A - カテーテル位置表示装置およびその使用法 - Google Patents
カテーテル位置表示装置およびその使用法 Download PDFInfo
- Publication number
- JP2004505748A JP2004505748A JP2002520893A JP2002520893A JP2004505748A JP 2004505748 A JP2004505748 A JP 2004505748A JP 2002520893 A JP2002520893 A JP 2002520893A JP 2002520893 A JP2002520893 A JP 2002520893A JP 2004505748 A JP2004505748 A JP 2004505748A
- Authority
- JP
- Japan
- Prior art keywords
- catheter
- coil
- patient
- display device
- processor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/742—Details of notification to user or communication with user or patient ; user input means using visual displays
- A61B5/743—Displaying an image simultaneously with additional graphical information, e.g. symbols, charts, function plots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6851—Guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/742—Details of notification to user or communication with user or patient ; user input means using visual displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J15/00—Feeding-tubes for therapeutic purposes
- A61J15/0003—Nasal or oral feeding-tubes, e.g. tube entering body through nose or mouth
- A61J15/0007—Nasal or oral feeding-tubes, e.g. tube entering body through nose or mouth inserted by using a guide-wire
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61J—CONTAINERS SPECIALLY ADAPTED FOR MEDICAL OR PHARMACEUTICAL PURPOSES; DEVICES OR METHODS SPECIALLY ADAPTED FOR BRINGING PHARMACEUTICAL PRODUCTS INTO PARTICULAR PHYSICAL OR ADMINISTERING FORMS; DEVICES FOR ADMINISTERING FOOD OR MEDICINES ORALLY; BABY COMFORTERS; DEVICES FOR RECEIVING SPITTLE
- A61J15/00—Feeding-tubes for therapeutic purposes
- A61J15/0026—Parts, details or accessories for feeding-tubes
- A61J15/0069—Tubes feeding directly to the intestines, e.g. to the jejunum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/363—Use of fiducial points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M2025/0166—Sensors, electrodes or the like for guiding the catheter to a target zone, e.g. image guided or magnetically guided
Abstract
本発明はカテーテルおよび人体におけるコイル位置の発信方法に関し、特に、挿入時および体内での使用時にカテーテルの先端位置を継続的に判定する方法に関する。特に、発信コイルをカテーテルとともに使用した場合、コイル位置表示装置を使ってコイルの装置からの距離を判定し、それによって患者の体の中での深さを判定することができる。コイル位置表示装置を使用する臨床医を補助するため、人体(非対象患者の体)の部位もしくは部分の基準画像と、表示装置上の基準画像に対して位置するコイルの画像とを表示する。これは、コイル位置表示装置を患者の人体の所定の目印上もしくはその上方に置くことによって行う。コイルとそれに伴う信号ワイヤをスチレット、ガイドワイヤまたはカテーテルに組み込むことができる。コイル位置表示装置は、好ましくは平面視で三角形であり、頂点が患者の頭部を指し、装置の軸を患者の正中線と合わせることができる。人体の好ましい目印には剣状胸骨結合部と、頚静脈胸骨切り込みの先端/正中線がある。
Description
【0001】
(技術分野)
本発明は人体におけるカテーテルおよびコイル位置の発信方法に関し、特に、挿入時および体内および/または体内の経路での使用時にカテーテルの先端位置を継続的に判定する方法に関する。
【0002】
(背景技術)
本明細書においては、理解しやすいように、経腸栄養カテーテルの誘導および載置、さらには作業中のメンテナンスについて、例を挙げて説明する。しかし、ここで説明する技術および機器は、人体および動物の他の部分における同様の載置においても有効であることは、当業者にとって明らかであろう。カテーテルは、多種多様な目的のために使用されるとともに、多種多様なタイプがある。本発明による、人体での使用例は、中心静脈カテーテルの位置決め分野においても適用できる。
【0003】
経腸栄養物は、経口食物摂取とチューブによる胃腸管への強制的な栄養投与の両方を含む。経腸チューブ栄養は、食べない、食べてはいけない、または食べることができないが、胃腸管が機能している患者に使用する。経腸チューブ栄養の利点は、胃腸構造の維持管理ができること、機能的に統合されていること、栄養物の利用率が上がること、実施が容易で安全であること、などである。
【0004】
経腸チューブ栄養は、広汎性腹膜炎、腸閉塞により腸管が使用できない場合、難治性嘔吐、麻痺性イレウス、および/または代謝管理を必要とするひどい下痢などの患者に使用する。臨床環境に依存する他の潜在的禁忌には、ひどい膵炎、腸皮フィステル、胃腸虚血などが含まれる。経腸チューブ栄養は、初期の短小腸症の場合、または、ひどい吸収不良があるときには使用しないほうがよい。
【0005】
チューブ栄養のための経路は、栄養注入の予測継続時間、胃腸管の状態(例えば、食道の閉塞、胃または小腸の切除の前など)、および吸引の可能性などによって選択する。腸へのアクセスはベッドサイドでも(経鼻腸管、経鼻内視鏡胃瘻造設術)、手術室(胃瘻造設術および空腸造瘻術)でも行うことができる。
【0006】
経胃栄養注入用経鼻挿管が最も単純な作業であり、チューブ栄養に最もよく利用される方法である。この技術は、最終的には口から栄養を補給できるようになると思われる患者に対して行うのが好ましい。外径が小さく、やわらかいフィーディングチューブを使用するのが患者にとって最大の慰めであり、また患者に受け入れられやすい。十二指腸や空腸へのアクセスは、長尺のチューブで行うが、十二指腸や空腸に先端を載置するのはさらに困難であるとともに、時間がかかり、付加的な危険要素を伴う。
【0007】
経腸チューブ栄養は、機械的感染や、代謝性合併症が非経腸的栄養補給でみられるよりも少ないため、非経腸的栄養補給より安全であると考えられる。しかし、経腸栄養注入も問題がないわけではなく、挿管や栄養注入を、技術的に熟練していない、または経験の浅い者が行った場合、もしくは監視が行われていなかったり、あるいは不適切であったりした場合にはかなりの感染症が起こりうる。
【0008】
フィーディングチューブの載置が不適切であることが、数多くの合併症の一因である。もっとも深刻なのは、カテーテルを循環系もしくは肺まで経鼻挿管している間にカテーテルを意図せぬ位置に載置した場合である。これらの状況は、ともに、経験の浅い医療従事者が挿管を行った場合に起きる可能性がある。挿管中は、スチレット(比較的硬く細いワイヤ)を使用して弛緩したカテーテル管を硬化させ、支持する。
【0009】
フィーディングチューブの出口孔(一般的には遠位端/管の先端)が、栄養注入の間、希望の位置に留置されていることをチェックすることが大切である。この要求事項に対応するためのプロトコルは、栄養液を搬送していない間にフィーディングチューブから抽出した流体のpHが適当であるかを頻繁に監視し、栄養の摂取が期待どおりに行われているかをチェックするために注意深く患者を監視することを含む。
【0010】
チューブの先端/遠位端の位置を判定するためにしばしばX線が使用される。しかし、X線でさえ、その位置を判別するのに必ずしも決定的なものとはいえない。内部の器官の自然で連続的な動きにより、時間の流れとともにカテーテルの位置が変わってしまう可能性があるため、医師にとっては、X線がチューブの先端/遠位端の位置を確実に示していると判断するのが難しくなる。
【0011】
カテーテルの種類はさまざまであり、その名称は時として、その使用法、挿入して処理する体の部位を示し、あるいは、その使用の方法論を確立した医師の名前にちなんでつけられる。
【0012】
さらに、本発明は中心静脈カテーテルのためのカテーテルの位置決め法とその手段に関する。
【0013】
静脈内カテーテルは皮膚の開口から静脈系の数多くの枝部の一箇所以上を通して治療の必要な箇所まで押し込み、患者の内部にアクセスするものである。これらのタイプのカテーテルは、静脈アクセスカテーテル(VAC)および中心静脈カテーテル(CVC)とも呼ばれ、一般的に循環器系で使用される。
【0014】
静脈内カテーテルのサブカテゴリーは、末梢静脈穿刺(PICC)に所属する。これらのカテーテルは、その挿入に関し、長い間臨床医によって使用され、数多くの異なる技術が存在する。
【0015】
その挿入技術の一つに、セルディンガー法があり、装置と材料の進歩に伴い、現在は改良されたセルディンガー法が存在し、特に細い、または貧弱な静脈に有効である。
【0016】
体内に挿入する際に使用する静脈内カテーテルには、例えば長さ1.5から3インチの末梢カテーテル、長さ3インチ以上の挿入に使用する中線カテーテル、さらに長いものとして、鎖骨中央、皮下トンネル非形成鎖骨下、皮下トンネル形成グローション、ヒックマンおよびブロビアック、または皮下埋め込みポートなど、多くの選択肢がある。
【0017】
静脈内カテーテルに共通しているのは、体内から静脈内にガイドワイヤを通し、医師の技術で希望の箇所まで誘導することである。ガイドワイヤが定位置につくと、カテーテルをその外部の自由端からスライドさせて挿入し、カテーテルの遠位端がガイドワイヤの端部に届くまで押し込む。
【0018】
これらのタイプのカテーテルの先端の位置決めまたはガイドワイヤの体内への前進を記録する方法は数多く存在する。
【0019】
カテーテルの先端もしくはその近傍にあると考えられる液体を取り出してそのタイプをチェックするための戻りチェックと、カテーテルの内部に挿入したワイヤ上の目盛りのチェックを使用してチェックする方法の二つが、一般的に他の手段が簡単に手に入らない医師が使用する方法である。ガイドワイヤまたはカテーテルの先端または経路の位置を必ずしも正確に判定することができなくても、超音波誘導、X線透視法およびX線方法論が好ましい。
【0020】
さらに費用がかかり、時間を必要とするCT検査は、上記の判定に加え、先端だけでなく、患者の体内に位置する上記した、およびその他のいかなるタイプのカテーテルの経路をも判定することができる。
【0021】
カテーテルの先端/遠位端の最終位置は、カテーテルの使用目的の有効性にとって最も重要なものである。ある例では、心臓への薬剤の直接投与は、上大静脈(CVC)にカテーテルの先端/遠位端を位置決めすることによって確実に行うことができる。研究の結果、カテーテルの先端/遠位端を上大静脈の上部(一般的に大静脈と心房との接合部から4.5cm以上上方であることから識別できる)に位置させるのが好ましいことが分かっている。また、研究の結果、これらの好ましい位置では、カテーテルの不具合が最小限に抑えられることが分かっている。
【0022】
しかし、研究の結果、カテーテルの不具合と、カテーテルの先端を上大静脈に隣接する静脈系内に位置させることとの間に大きい関連があることが分かっており、さらに大切なことは、カテーテルを確実に上大静脈自体の内部に位置させることなのである。
【0023】
図7には、上大静脈を含むその近傍の静脈を示している。
【0024】
例えば、カテーテルの先端が、腕頭静脈または腕頭静脈の接合部近傍のいずれかにある場合、カテーテルの先端が上大静脈内にある場合に比較して、フィブリンシース(fibrin sheath)を誤って展開してしまったり、あるいは、カテーテルの先端もしくはその周辺に血栓が存在していたりする可能性が高い。カテーテルの先端が、鎖骨下静脈または大静脈と心房との接合部または右心房内にある場合に、誤った展開の可能性が高くなる。
【0025】
カテーテルの先端が不適切な位置にある場合、もしくは理想的でない位置にある場合、明らかに本来ならば管理可能な寿命を縮める結果となるが、さらに深刻な影響としては、血栓症および静脈炎があり、特に、気胸感染およびさらに深刻な状況としては閉塞がある。
【0026】
研究の結果、カテーテルの先端が血栓によって妨害された場合、このように誤って展開されることのないカテーテルに比べるとその寿命が著しく縮まることが分かっている。
【0027】
静脈内カテーテルを使用する必要がある場合、患者を適切に治療するには、多数の要素を考慮しなければならない。場合によっては、薬剤を投与する利点と上記のような感染に関する静脈内装置の悪影響の発生の可能性とをはかりにかける必要もある。
【0028】
カテーテルの選択は、単純な問題はなく、次のような要素を考慮しなければならない。
・投薬のタイプ
・注入する溶液のオスモル濃度およびpH
・必要な治療の期間
・二次的危険要素および持病
・患者の年齢、活動、仕事、生活様式
・将来的な静脈注射の必要性および長期的な病気の予後
・現在の利用可能度、アクセスする静脈の状態(特に手足の末梢静脈)
・患者の神経性疾患歴、静脈またはリンパ系に影響のある手術歴、血液疾患歴、血栓歴およびこれまでの静脈注射の使用歴など
・現在の患者の診断および治療の希望
【0029】
治療の予想期間が5日未満であるならば、短い局所カテーテルが好ましく、4週間未満であるならば中線カテーテルが一般的に適している。
【0030】
鎖骨中央線も選択肢のうちの一つであるが、上大静脈以外の鎖骨下領域に不適切に載置した結果、血栓が起こる例が多くなってきたため、より一般的に使用されるようになってきている。
【0031】
実際、鎖骨中央線は、確認的X線の時間とコストを削減するために、自宅治療形態において多く使用される。しかし、鎖骨中央線の場合でも、上大静脈の下側三分の一の部分の上大静脈と右心房との接合点の近傍に最適に載置する必要があり、さらに右心房には入ってはならない。
【0032】
上述の、先端位置を上大静脈内とする末梢静脈穿刺カテーテル(PICC)は、長期間(5日から1年)の治療に使用することができる。しかし、全体的に満足のいく確かな位置チェック法ではないが、X線によってその先端の位置決めを厳しくチェックしなければならない。
【0033】
よって医師にとってまさに必要なのは、カテーテルが患者の体内の希望の位置に載置されていること、そして、そこに留置されていることをより確かに確信できることなのである。それが、経腸、非経腸栄養補給、発泡性化学療法薬剤、抗生物質、血液採取または他のいずれを目的としたものであっても同じである。
【0034】
(発明の簡単な説明)
本発明は、おおむね、対象患者の体に挿入されるカテーテルにおいて使用する、信号エネルギーを発信するコイルの位置を表示する方法であり、前記方法は、少なくとも二つの信号エネルギー検出器を有するとともに前記対象患者の体の所定の位置または部分に対して位置決めされたコイル位置測定手段を使用する工程と、前記コイル位置測定手段よる位置測定結果を表示する工程と含み、前記位置測定結果は、前記位置測定手段に対して臨床医が前記対象患者の体の内部において、前記対象患者の体の所定の位置または部分に対する前記コイルと前記カテーテルの位置を判定するために使用する。
【0035】
本発明の更なる局面によると、前記方法は、更に、前記位置測定結果により、前記表示された位置測定結果に関連付けた、臨床医が前記対象患者の体における前記コイルと前記カテーテルの位置を判定する為に使用する非対象人体の部分または領域を表す工程を含む。
【0036】
本発明のもう一つの局面によると、位置測定手段は、前記人体の剣状胸骨結合部上又はその上方の所定の位置に関連付けて位置させ、消化管の中に挿入したカテーテルと共に使用する。
【0037】
本発明のもう一つの局面によると、非対象の人体の横隔膜を表す体の部位の領域又は描写が表示され、前記表示装置に人体の上下の胸腔が描写される。
【0038】
本発明の更にもう一つの局面によると、位置測定手段は、前記人体の頚静脈胸骨切り込みの先端/正中線上若しくは上方の所定の位置に関連付けて位置させ、心臓血管または呼吸器系の中に挿入したカテーテルとともに使用する。
【0039】
本発明のもう一つの局面によると、人体の胸骨を表す前記人体の部位の領域もしくは描写が表示され、よって前記表示装置に人体の骨格の上部が描写される。
【0040】
本発明の更にもう一つの局面によると、前記方法はさらに、前記コイルの位置測定結果を所定の時間間隔で表示する工程を含む。
【0041】
本発明のもう一つの局面によると、コイルはカテーテルとともに使用するように構成されたスチレット又はガイドワイヤに組み込まれている。
【0042】
本発明のもう一つの局面によると、前記方法は、更に、前記スチレットまたはガイドワイヤがカテーテルから引き戻されている間に前記コイルの位置を所定の時間間隔で表示して、前記コイル及び前記カテーテルの経路を追跡、表示する工程を含む。
【0043】
本発明のある局面によると、コイルがカテーテルに組み込まれており、人体内の前記カテーテルの位置を示すために使用可能である。
【0044】
本発明のもう一つの局面は、カテーテルと共に使用可能であり、第1の端部と第2の端部を有するワイヤと、ワイヤの第1の端部と電子通信を行うプロセッサと、ワイヤの第2の端部に接続してあり、対象患者の体の様々な箇所に位置せしめられる発信コイルと、プロセッサと電子通信を行い、対象患者の体の所定の部分に関連して位置決めされるように構成された検出装置と、少なくとも一つの所定の画像を表す少なくとも一つの基準画像を指定するプロセッサが検索した基準データと、対象患者の体の中の発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定するプロセッサによって生成する指示データと、指示画像と基準画像を表示するプロセッサと電子通信を行うモニタとを備えた、ユーザが対象患者の体の中にカテーテルを載置する作業を補助するためのカテーテル位置表示装置である。
【0045】
本発明のもう一つの局面は、(a)コイルと電子通信を行うプロセッサと、(b)信号を発信すると共にコイル位置決め装置、スチレット、ガイドワイヤ、または前記カテーテルに組み込まれた、対象患者の体の内部のさまざまな箇所に位置せしめられる発信コイルと、(c)プロセッサと電子通信を行う検出装置と、(d)対象患者の体の少なくとも一つの所定の部分を表す少なくとも一つの基準画像を指定するプロセッサによって生成される基準データと、(e)対象患者の体における発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定するプロセッサが生成する指示データと、(f)指示画像と基準画像を表示するプロセッサと電子通信を行うモニタとを有するカテーテル位置表示装置と共に使用するように構成されたカテーテルであって、前記カテーテルは、スチレット又はガイドワイヤを受容するように構成されているか、コイルが組み込まれたチューブを備え、チューブは近位端と遠位端を有し、先端は遠位端に含まれる。
【0046】
本発明の更にもう一つの局面は、カテーテル内に挿入可能であり、近位端と遠位端を有するマルチストランドワイヤと、前記ワイヤの二本のストランドの遠位端に接続した発信コイルと、少なくとも二個の受信コイルと、モニタと、ワイヤ、受信コイル、及びモニタと電子通信するプロセッサとを備えたカテーテル位置表示装置であって、プロセッサは、少なくとも一つの基準信号を受信コイルが対象患者の体の少なくとも一つの所定の骨の目印に対して位置決めされた後に、少なくとも二つの受信コイルから受信するとともに、基準データを検索し、モニタを駆動して基準データを図で表示し、発信コイルを対象患者の体に挿入した後に発信コイルから信号を受信する少なくとも二つの受信コイルから少なくとも一つの指示信号を受信すると共に、指示データを生成し、モニタを駆動して、指示データを図で表示する。
【0047】
カテーテルを対象患者の体の中に適切に載置しやすくする為のもう一つの方法は、
(a) 対象患者の体の所定の目印に対して位置付けされた、少なくとも一つの受信コイルの位置を示す少なくとも一つの基準信号を受信する工程と、
(b) 対象患者の体に挿入した発信コイルから少なくとも一つの指示信号を受信する工程と、
(c) 所定の目印に伴う基準データを検索する工程と、
(d) 基準データから引き出した基準画像を表示する工程と、
(e) 対象患者の体上または上方の少なくとも二つの受信コイルの位置の相対位置を示す指示信号によって表されるデータを生成する工程と、
(f) 指示データが表す図を表示する工程と、
(g) 指示信号の変化を受信した後、工程(e)と(f)を繰り返す工程とからなる。
【0048】
更なるカテーテル位置表示装置を操作する方法は、
(a) 検出装置の所定の領域を対象患者の体の所定の目印上に載置する工程と、
(b) カテーテル、スチレット、ガイドワイヤ又は発信コイルを埋め込んだコイル位置表示装置を対象患者の体に挿入する工程と、
(c) 所定の部位または部分の図形表示、もしくは、基準画像の表示をモニタ上で見る工程と、
(d) モニタ上で発信コイルの図形表示を見る工程と、
(e) 図形表示の相対位置の表示を利用して、対象患者の体の中でカテーテルを操縦する工程と、を備えてなる。
【0049】
本発明の更にもう一つの局面は、カテーテル位置表示装置と共に使用するワイヤの束を備え、(a)ワイヤの束の近位の端部の所定の部分と電子通信を行うプロセッサと、(b)ワイヤの束の遠位の端部の所定の部分と接続され、対象患者の体内でさまざまな箇所に位置せしめられる発信コイルと、(c)プロセッサと電子通信を行い対象患者の体の所定の部分に関連付けて位置決めされるように構成された検出装置と、(d)少なくとも一つの所定の画像を表す少なくとも一つの基準画像を指定するプロセッサによって検索された基準データと、(e)対象患者の体おける発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定するプロセッサによって生成される指示データと、(f)指示画像と基準画像を表示するプロセッサと、電子通信を行うモニタを備え、
前記ワイヤの束は、
可撓性チューブの位置決めを制御するように構成された所定の堅さを有する第1のワイヤと、
発信コイルとプロセッサとの間で信号を伝送するように構成された第2のワイヤと、
第2のワイヤを第1のワイヤに固定する為の手段とを備えている。
【0050】
本発明の特定の実施形態について、添付の図面を参照しながら更に詳しく説明する。これらの実施形態は、説明のみを目的としたものであり、本発明の範囲を限定するものではない。
【0051】
他の実施形態の提案と説明が本発明の説明に含まれるが、添付の図面には示していない。また、本発明の代替の特徴を図に示すが、明細書内では説明していない。
【0052】
(本発明の実施形態の詳細な説明)
図1は、先端/遠位端の近傍に、米国特許5,099,845号に説明するものと類似した装置によって検出することができる信号を発するために使用するコイルを有する1ルーメンカテーテルを示す図である。この特許は、マイクロニックスPty Ltd.による特許であると共に、本明細書内で引用して参照している。上記の特許の引用は、当業者共通の一般的知識として入っている明細書の内容を認めるためのものと解釈してはならない。
【0053】
上記の特許で説明されている本発明の装置は、カテーテルの端部に位置するコイルの深さと位置と、その向きとを判定するための手段を提供している。カテーテルのタイプは、発明の原理と方法にとって重要ではない。
【0054】
深さおよび位置判定装置は、ここでは、検出装置ともよぶが、おおむね、上記の明細書内で開示されたタイプのものであり、ここで説明する方法に使用することができるが、必要とされる特性を提供することができるのは、この装置に限らない。
【0055】
図1に示すカテーテル10は、出口孔14が詰まりにくいように設計された、適した先端形状12を有しており、特に非経腸的栄養補給に使用するのに適している。図示のカテーテルは1ルーメン(近位端から先端/遠位端まで通路が1本)であるが、他のカテーテルは、複数のルーメンを有しているものでもよい。
【0056】
コイル16は、先端12およびカテーテルの長さ分延在する対のワイヤの二つの端部の近傍に位置する。対のワイヤはカテーテルの近位の端部の近くのコネクタ18まで続いている。カテーテルへの入口孔20は、カテーテルの最近位の端部に位置している。カテーテルの先端/遠位の端部が患者の内部の適切な位置に到達すると、この孔を通して希望の時間に希望の速さで栄養が送り込まれる。
【0057】
異なる用途に対して使用するカテーテル用のコネクタは、それぞれ寸法、接続タイプおよび色が異なり、できるだけ安全に使用できるように構成されている。適用方法が異なるカテーテルの相互接続を、不可能とはできないまでも困難にすることによって、意図する用途の違うカテーテルによって患者に誤った、または不適切な流体、特に薬剤を誤って投与する可能性を最小限に抑えることができる。
【0058】
カテーテル10を、患者の胃腸管の中に挿管する際、金属のスチレットをカテーテルの中で使用する。
【0059】
スチレットは、前述の対のワイヤを備えるか、もしくは対のワイヤを組み込んだ、典型的なスチレットワイヤ(単数もしくは複数)を備えていてもよい。スチレットは、意図した用途に適していると知られた材料の中に封入することができる。スチレット自体は、一般的にはステンレス鋼から形成するが、図2に示すようにプラスチックまたは他の適した材料から形成してもよい。
【0060】
ある実施形態では、プロセッサをワイヤの束の近位の端部に接続し、コイルをワイヤの束の遠位の端部に接続する。ワイヤの束には、信号搬送ワイヤ(単数もしくは複数)に適当に結合したガイドワイヤが含まれる。束は、その端部およびその長さに沿って相互に結合されており、意図した用途に適していると知られた材料に封入することができるのが好ましい。また、束は、例えば、共に包み込んでも、適した材料で包んで、適した接着剤または締結材、もしくは適した寸法および形状に形成してもよい。図2を参照のこと。
【0061】
挿管は、患者の口または鼻の通路を通して行うことができるのが好ましい。スチレットは、その他無定形のカテーテルを強固にし、その全長にわたり、またその近位の端部で操縦できるようにし、その先端/遠位の端部を保健専門家もしくは挿管に熟練したスタッフが患者の内部の適当な経路内で操縦する。
【0062】
本明細書内では、挿管を行うのは臨床医であると記述しているが、熟練した保健専門家も、さまざまな用途で患者にカテーテルを挿入することができる。また、一般的に、適した流体を投与するために使用する単一のルーメンを有するカテーテルの先端/遠位端もしくはその近傍においてカテーテルの壁内に組み込んだコイルを有する、適度な堅さのカテーテルを使用することもできる。
【0063】
発明者は、経済的かつ実用的であるという理由から、カテーテルの中に一体化したコイルの配置したものを利用できるということに気づいた。しかし、スチレットを使用して発信コイルを支持するという、ここで述べる代替の配置の方が好ましい。
【0064】
その理由は、医療機器は高水準を求められることから、カテーテルとコイルを組み合わせるには、製造にコストがかかるからである。カテーテルの製造業者は、専門家のための製品を提供することから、その製品のコストを著しく引き上げるような変更は彼らの利益にはなるとは限らない。
【0065】
さらに、カテーテルとコイルの組み合わせとしての用途は一つしかないため、コイルの負荷価値は回復不可能であり、よって、より時間がかかるものであってもX線を含む現在の探知技術と競合する必要があるのである。
【0066】
よって、コイルをスチレットの先端/遠位端に組み込むことが可能であることを確認した。
【0067】
スチレットは、カテーテルの先端/遠位端を希望の位置に操縦するだけでなく、引き戻すこともでき、また、要求されるプロトコルに従って、適切な汚染除去および洗浄後に再使用することができる。発明者は再使用に関連するプロトコルが確立しない限り、再使用は推奨しない。
【0068】
コイルの深さと位置は、挿管工程中に判別することができる。さらに、カテーテルの先端を位置決めするために使用した場合、そしてそれに続いてカテーテルの先端/遠位端を適当に位置決めした場合、カテーテルの経路はスチレットをカテーテルから引き出している間に判定できる。スチレットを引き出した後に表示されたトレースの例を図6に示す。その詳細は、本明細書内で後述する。コイルを一体化したスチレットは、患者内における、カテーテルの長さに沿った特定の位置を判別するのにも使用することができる。よって、複数のポートをその長さ方向に有する複数のルーメンを有するカテーテルでは、患者内におけるそれらポートの位置をそれぞれ判別することができる。
【0069】
スチレットの端部に設けるコイルの製造は、ありふれた作業ではないが、自動化して、ほんの数種類の異なる材料で製造することができる。多種多様な材料やプロセスは、上記のようにカテーテル/コイルの組み合わせを製造する場合には関係ない。
【0070】
上記のように、コイルがスチレットの中に組み込まれることによる特別有利な特性は、スチレットとコイルをカテーテルから引き出している間、位置決め装置がカテーテルが通った患者の体内の経路を記録することができる点である。X−Y位置およびその検索装置に対する深さを含み、その経路を記録することができる。最も便利なのは、カテーテルの経路が患者の解剖学に直接関連付けるように表示することができることである。本明細書で後述するように、検出装置を患者上に適当に位置決めすることにより、モニタ上のトレースの位置を参照して患者の内部における位置を確認することができるようになる。
【0071】
その結果、カテーテルの先端/遠位端の位置を再チェックおよび先でのカテーテル経路を逆戻りする作業を容易に行うことができるとともに、カテーテル先端の位置に関する早期の記録と比較することができる。
【0072】
さらに、表示される経路は、カテーテルが実際に希望の経路と通ったことを臨床医が確認しやすいような特徴を有する。
【0073】
時間の経過に伴って、深さの情報を含む表示は、位置決めの修正に関する他の医学的観察と相互に関係しており、よって臨床医は、経路と最終的な載置が予定通りであるという確信をより高めることができる。
【0074】
表示された経路により、予測した解剖的変異の範囲内で、カテーテルの先端/遠位端もしくはカテーテルのその他の部分が患者の希望の領域に位置していることを確認できる。例えば、経腸栄養カテーテルを位置決めするときの希望の領域は、図6に描写して示すように空腸の近傍である、などである。
【0075】
また、これらの技術を挿管工程で使ってカテーテルが通った経路をすぐにフィードバックすることもできる。
【0076】
ここで説明した技術は、カテーテルの載置を補助するものであり、長期の栄養補給に管腸造瘻術が必要である場合、もしくは閉塞により、経鼻挿管が不可能な場合に特に適用できる技術である。従来の胃瘻造設術または空腸造瘻術は、外科的処置を必要としていたが、これは明らかに、そして、好ましいことに、避けることができる。
【0077】
経胃栄養チューブの経皮内視鏡的載置は、ベッドサイドで、または内視鏡室において通常の麻酔を行わずに実施できる。空腸の延長も、胃用ポートを、幽門空置術後の経腸栄養注入が必要な患者に経皮的に載置することによって確認することができる。また、開腹の際に載置したニードルカテーテルまたはウィッツェル空腸造瘻術により、小腸の方が胃や大腸より術後のイレウスによる影響が少ないため、早期に術後の栄養注入が可能となる。空腸栄養注入は、経胃栄養注入に比較して嘔吐物吸引の危険性が最小限となる。
【0078】
しかし、ここで説明した技術は、残留胃液のチェックを管理、監視するための技術に代わるものではない。患者の医学的監視は継続しなければならない。しかし、この技術により、コストと時間のかかるX線設備の使用、専門的技術、またはその他のさらにコストと時間のかかるカテーテル位置決め作業が、軽減もしくは不要となる。
【0079】
図2は、先端/遠位端にコイル24を有するスチレット22と、コイルを形成するワイヤの近位端がコネクタベース26内に位置し、操作ブロック28がスチレットの最近位端に設けられているところを示す。スチレットの形状は、一般的に長尺でまっすぐであるが、図2に示すものは図1に示したカテーテル10に対応した形状となっており、これは説明の便宜上そのようにしただけである。臨床医は、スチレットを捻って、先端/遠位端をカテーテルの内部および内側端部に載置した時にカテーテルの先端/遠位端を回転させて患者の体内のさまざまな通路および孔を通して操縦できる。このスチレットを捻る作業は推奨できるものではないが、文字通り臨床研修では知られた作業である。
【0080】
図3は、患者の躯体28を前から見た図であり、患者の体内における、検出装置の三つの検出コイルの好ましい位置を三つの○印で示している。
【0081】
検出装置の外形は、実際の検出器が作動する方法にとって取るに足らないことではあるが、発明者は、その外形によってはその検出装置を患者の体の所定の位置上もしくは上方に適切に位置させやすくなると考える。例えば、三角形状であれば装置の頂点を患者の頭部に向けて載置すれば、装置の長手の軸を患者32の正中線と一致させることができる。
【0082】
丸印30が三つの検出コイル部の最も重要な部分であり、この実施形態では、カテーテルを消化管(人体の消化系の部分であり、制限なく、咽頭、食道、胃、および腸を含む口から肛門まで延在する粘膜を有する管)、あるいは特に腸管に載置するため、直接剣状の胸骨結合部上に載置する。これにより、三つの検出コイルの長手の軸が体の正中前後方向に延在する面32(正中線)と一致する。特に剣状胸骨結合部は一般的に鼓動しやすいため、臨床医が位置決めしやすいように、三つの検出コイルの長手の軸は検出器のハウジングのケース上に彫り込んである。
【0083】
剣状胸骨結合部は、横隔膜が人間の骨格に結合されている点である。図に示された二本の円弧状の線(34および36)は、腹部と胸郭を分離する筋膜隔壁(横隔膜)の非常に複雑なドーム型の上限であり、主要な胸筋として作用する。
【0084】
これら二本の円弧状の線34および36は、図5および6に示すように、正中線32とともにモニタに表示されているため臨床医がカテーテルを戴置するのに役立つ。
【0085】
円弧状の線34および36の表示は、上記の方法の検出コイルの正確な位置決めに役立つことは明白である。丸印30の中のコイルの位置と剣状胸骨結合部の相関関係により、すべての患者に共通する人体の部位に対するコイルの位置および深さを監視することができるようになる。検出装置は、装置の外郭を、コイル30を剣状胸骨結合部上以外の場所に載置する特定の方法で位置決めした場合に置き得る所定のオフセットは許容できるため、コイルを目印となる特定の骨と一致させなければならないわけではない。
【0086】
この装置は、特定のコイル30が上記のような方法で正確に位置決めできなかったとしても、比較的有効である。二つ以上の信号検出要素を、人体の所定の部位または位置に関連して人体のある箇所に位置させることが重要なのである。よって、ガイドワイヤもしくはカテーテルの端部のコイルの位置が表示された場合、それは、臨床医の載置作業に役立つよう、周知の人体の部位または部分のおおよその位置に関連して表示することができるのである。
【0087】
二本の円弧状の線34および36が、複雑な横隔膜の形状を単純に示したものであることは明らかである。その表示の少なくとも一部が、横隔膜の剣状胸骨との接合点と一致しているので、それらの線は、モニタ上に正確に表示され、臨床医にとって十分に役立つ情報である。センサによる測定を参照すれば、その表示は少なくともカテーテルの先端/遠位端が横隔膜の下もしくは上に位置しているという確信を臨床医に与えることができる有用なガイドとなる。検出コイルの所定の位置決めを基準として、人体の部位もしくは部分を同様にモニタ上に表示してもよい。
【0088】
腸の挿管では、多くの場合、カテーテル/スチレットの先端/遠位端が、横隔膜の形状を表した二本の円弧の下まで通過したことが表示されることにより、臨床医は、カテーテルが患者の気管および/または肺の中ではなく、胃腸管の中にあることを確認することができる。まさに、カテーテルの先端/遠位端が間違えて肺の中に入ると、カテーテルの先端/遠位端は、予測経路から離脱してモニタ上に表示される。
【0089】
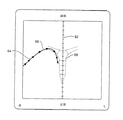
予測経路からの第1の主だった離脱は、二本の円弧の上方10cm位の箇所で起こりうる。すなわち、剣状胸骨結合部上の、気管分岐レベル近傍である。これは、正しい経路から予測されていたより人体の深いところにあるとも考えられる。図4に示す経路は、経腸挿管に関するものであるが、図示の領域38でおおよそ示される胃の中に入っているところである。カテーテルは、平均的に移動し、40の位置で正中線と再び交差し、幽門から十二指腸の領域42の第1の部分に入る。十二指腸の領域42を通過すると、カテーテルは、小腸の部分に相当し、十二指腸から回腸まで延在する空腸領域44を通る。
【0090】
本検出法および装置を使ってカテーテルの特定の部分の位置を検出することもできる。例えば、先端においては経腸栄養注入を行い、その全長にわたって胃の中のガスを減圧する二重空洞カテーテルは、その先端/遠位端を理想的に空腸と減圧する空洞の中に延在させ、幽門から外に出ないようにしなければならない。カテーテルの減圧空洞の始まりが、カテーテルの遠位端から周知の距離の位置にある場合、コイルを先端に有するスチレットをカテーテルの遠位端からその周知の距離だけ引き戻せばよい。発信コイルの位置がその結果検出され、予測していた位置測定結果と比較され、カテーテルが患者の内部に正しく位置しているかどうかが示される。
【0091】
もう一つの例では、カテーテルの長さに沿って位置する吸引もしくは圧力測定ポートが患者の体内の希望の位置にあるかどうかを有利に判定することができる。これは、挿管の場合だけでなく、カテーテルの使用中にも可能である。
【0092】
患者内の実際の箇所、領域、または構造体に相関する基準点(単数もしくは複数)をモニタ上に有することが有利であるのは明らかである。この特性は、腸内挿管中に有効であるが、一般的に中心静脈カテーテル(CVC)としてよく知られた静脈アクセスカテーテル(VAC)を位置決めする場合にも有利である。それらカテーテルの一部について、そして、その位置決めについては本明細書で詳しく後述する。
【0093】
人体の内部のカテーテルの経路の監視および処置中の正しい位置決めの再チェックは、ここで説明するカテーテル位置決め装置によって可能となる。有利なことに、VAC/CVCの先端/遠位端は、胸部の上部の位置に載置されるため、体内の動く器官に直接接触していないことから、不安定な動きは少ない。患者の呼吸による動きもカテーテルの先端の位置の表示に影響するが、この方法ではずっと少なくなっている。
【0094】
線または記号(例えば横隔膜の表示など)を示すモニタ表示は、臨床医を補助し、カテーテルの先端/遠位端の経路と最終位置が正しいという確信を高めることができる。しかし、表示された線または記号がトレースに対して正しく位置決めされ、カテーテルの患者の体内での位置を適切に反映するように検出コイルを所定の基準点に対して正しく位置決めすることが重要である。
【0095】
CVCを前述のカテーテルタイプまたは方法によって挿入する場合、検出装置をはっきりと決められた、好ましくは骨の目印上に位置させるのが好ましい。この例では、検出装置の三つの検出コイルのうちの所定の一個をその目印の上に置いている。中心静脈カテーテルの先端/遠位端を患者の上大静脈の中に位置させる場合には、図8に示すコイル30を正中線に沿って延在する頚静脈胸骨切り込みの先端/正中線に位置させるのが好ましい。
【0096】
可能な検出装置の形状31も、図8に示す。装置の形状は、平面視で三角形であり、前述したように患者の胸の上で使用するのが好ましい。この形状は、臨床医が使いやすい形状である。なぜなら、その頂点33は、頚静脈胸骨切り込みの先端/正中線に位置しており、その長軸は患者の正中線32と一致する。
【0097】
検出装置を好ましい場所に位置決めするため、装置の外側ケースには、患者に対し、この特殊な形状を好ましく方向付けるため、下の角部に“左”“右”とそれぞれ記されている(図示せず)のが好ましい。さらに、患者の正中線と視覚的に合わせることができるように長手の軸に沿って延在する線を記しておく、または彫っておくとよい。しかし、一般的な使用法であろうと、患者側の事情にあわせた使用法であろうと、人体の他の部分で使用するのに適した、異なる形状のハウジングを有する検出器としてもよい。
【0098】
頚静脈胸骨切り込みの先端/正中線は、臨床医が検出装置を置くのに最適な場所である。なぜなら、そこは、すべての人間において共通の場所であると共に、視覚的に分かりやすく、患者の肉体的状態に関係なく鼓動する場所であるからである。しかし、この目的のため、骨の解剖学的目印として使用できる骨の箇所または人体の領域は、頚動脈胸骨切り込みのみではない。人体には他にも、所定のオフセット位置に測定機器を容易に位置決めまたは位置直しができる箇所もある。この配置により、モニタを基準点もしくは基準物を表示するために使用することができ、臨床医にとって有効な、人体の部位と同じ形状とするのが好ましい。カテーテルやガイドワイヤを挿管する、もしくは先に位置決めしたスチレットを入れて引き出したカテーテルの位置をチェックする際などである。
【0099】
経腸もしくはCVCに使用するカテーテル/ガイドワイヤの経路を図4,6,9,10にそれぞれ示す。これらの経路は、理想的に示された経路である。これらは、カテーテルを経腸栄養注入もしくはCVC位置決め用カテーテルの挿管工程で位置表示装置を使用している間に臨床医が必ずしも見えるとは限らない。
【0100】
実際は、信号発信コイルの現在の位置と深さは、図5に表示されている状態のほうがより近い。
【0101】
患者の生体のある領域に使用した場合、経腸栄養カテーテルの先端/遠位端のコイルは、患者の内部器官の無意識の動きによって移動し続ける。これは、呼吸(横隔膜の動き)という単純な動きによるものである。また、蠕動(胃、十二指腸、空腸などの管状の器官の長手および円形の筋肉繊維が内容物を押し出す動き)によるものである。さらに、動きの程度は、ずっと小さいが、胸腔の上部の器官に挿管したときなど、挿管工程で起きうる、避けられない他の動きもある。
【0102】
最も有効な表示形態を提供するためには、連続的な矢印の描写(現在のコイルの位置、深さおよび向きを示す)の間の遅延と、臨床医にとって必要なコイルの動きの表示との間でバランスをとることが必要となるのは明らかである。間隔があまり長すぎると、コイルは、画面に記録され、臨床医に表示される前に間違った経路に沿って受け入れられない距離を進んでしまう可能性がある。逆に間隔が短すぎると、上記のような動きの要素によってジャンプする矢印で画面が一杯になってしまう。いずれの場合も、臨床医の助けになるどころか混乱させて誤った方向へ導きかねない。
【0103】
理想的な遅延が、医学的には究極の選択であり、装置は、臨床医によって希望の表示特性を示すように調整可能である。このような遅延は、CVCカテーテルが挿入されたとき、または体内の他の領域に挿入されたときなどによって異なる。
【0104】
連続的に表示された位置を示す印の量は、医療上の好みの問題でもあり、図5に示す例では、14の位置が連続的に一度に表示されている。表示の最後尾は、患者の内部の器官を通ってコイルの経路が進むにつれて消え、画面上に表示される印を最低数に維持する。そうでないと、モニタが印で一杯になってしまい、カテーテル/ガイドワイヤの先端/遠位端の動きと現在の位置とを確認するのが困難となる。異なる色で新しい印、最終の印、そして、中間の印を表示しても、臨床医にとっては有利であろう。
【0105】
経腸栄養カテーテルの場合、カテーテルの先端/遠位端を、経腸栄養注入に最も適した空腸の領域に位置させたら、ガイドワイヤを抜くことができる。この時点で、位置および深度検出機器を記録モードで使用することもできる。
【0106】
ガイドワイヤが例えば3秒以上引っ張られると、モニタを使ってコイルがそのとき適した位置にあるカテーテルの経路を通って戻る間、その経路(X−Yおよび深さ)を追跡する。検出装置は、最も適合度の高い線を算出するために十分な測定がきるよう、所定の距離を空けて位置する二つ以上の検出コイルから発信コイルまでの半径方向の距離を記録するように配置する。測定を行えば行うほど、線の適合度は高くなるのは明らかである。しかし、それらの測定結果を、コイルがカテーテルから引き出されるときの経路を示す視覚的表示に変換する技術は数多く存在する。電子および演算技術の当業者にとっては、そのような機能を提供するのは容易なことであろう。
【0107】
検出した信号の変化を使って、発信コイルが進んだ経路を判別することができる。そして、コイルの動作を検出し、表示処理する他の方法も数多く存在する。別の方法として、コイルの位置を、所定の変化があるたびに表示する方法がある。実際に必要とされる変化は、発信コイルを取り付けていたときの用途により、ユーザが調整できる。
【0108】
演算機能を有するプロセッサも、検出装置が受信した様々な信号を比較するための方法の一つであり、引用した米国特許の中に出願人によって開示されており、その場合も三つのコイルを特定の空間関係で配置している。
【0109】
プロセッサは、プロセッサが受信し、処理した信号に基づいて、表示のデータを作成する。さらにプロセッサは、装置のユーザに最も有効な形式で、発信コイルの位置を表す指示データを作成する。そのような形式の一つとして、インジケータの画像がある。図面では、検出されたコイルの位置および方向をユーザに矢印で示している。この特殊なインジケータの表示は、有効ではあるが、その他にも有効な表示が数多く存在する。
【0110】
また、プロセッサは、所定の基準画像を指定する基準データを作成することもできる。基準画像は、線、曲線、またはオブジェクトでもよい。好ましくは、基準画像は、人体の適当な部位または部分がよい。その部位または部分は、挿管されている患者の実際の部位または部分ではなく、架空の描写である。特に、非対象の人体(患者のものではない)でもよい。前述のように、異なるタイプのカテーテル位置決め装置は、互換性はなく、共通の検出装置を使用することができるように設計されている。しかし、異なる装置がある場合には、そのタイプをプロセッサに知らしめる必要はない。その二つは互いに対応して製造されているため、一つ以上の所定の基準画像を含むデータ記憶装置を利用することができる。よって、データ記憶装置を使って、検出装置のタイプと使用する場所に対して例えば胸骨に適した画像を提供することができる。また、データ記憶装置は、カテーテルとともに使用した発信コイル(指示データ)の位置に関する情報を表示装置に表示するのに有効な記号やその他の画像、および基準画像(適当な位置に配置した人体の部位もしくは部分の記号)などを保存することができる。
【0111】
図6に示す表示は、特殊な患者におけるトレースを示す典型的な結果である。他の患者は、わずかに異なる経路と深さを示すであろう。図示の深さの測定結果は、相対測定であり、絶対測定ではないが、適した方法で使用されている。患者の中にカテーテルを挿管する熟練した、経験を積んだスタッフの大きな助けとなっている。
【0112】
カテーテルの先端の相対的深さが個人による変化の率が非常に小さいため、そこに最も注意を払っている。
【0113】
経腸栄養カテーテル挿管の例において、図6に示す表示は、カテーテルが剣状胸骨結合部30の下を通過するときに非常に深い(例えば検出装置の位置より17cm下)ことを示している。カテーテルが胃の中を通過するとき、その先端は、より近く、より浅い(例えば14cm)のところを通過し、正中線32の下を通るときには非常に浅く患者の表面に最も近い(例えば8cm)。十二指腸のはじめの部分は比較的浅く(例えば10cm)、最終的には、十二指腸/空腸で非常に深くなる(例えば17cm)。
【0114】
長期間医療関係で使用した後、上記(または他の)箇所または領域で許容可能で確実な範囲の深さおよび率が開発され、カテーテルが通過する経路の正確性を医療的に評価するために最も役立つようになるであろう。
【0115】
この場合も、スチレットに取り付けたコイルの先端/遠位端、しかるにカテーテルの先端の正確な位置を証明するものではないが、表示された特性は、カテーテルの位置に関する医療上の決定を改善するために貢献する。
【0116】
スチレットは、カテーテル内で再使用することができる(汚染除去および洗浄後)。よって、医療上の環境で安価に利用でき、X線や他の検出法における費用と時間のかかる場合に比較して、より頻繁にカテーテルの位置をチェックするようになる。スチレットの再使用は、医療環境では一般的ではあるが、これらの装置の再利用を管理する作業標準のもとに既成当局の許可がないかぎりは、本書の著者は推奨しない。
【0117】
もちろん、他の医療監視技術も継続的に使用し、経腸/非経腸栄養であろうと、他の目的であろうと、カテーテルが適当な位置にあることを臨床医がさらに確信できるようにする必要がある。
【0118】
患者はX線、X線透視法、超音波診断法による画像ガイダンスによってVAC/CVCで挿管されることがしばしばである。経皮中心静脈アクセスは、カテーテルの先端が大静脈心房領域に位置しているときに行う。皮下トンネル形成カテーテルは皮膚の切開部分を介して体から出る前に皮下管を通る。このようなカテーテルは、薬剤投与および透析に使用する。画像ガイド技術は、高価であるが、盲目挿管もしくは、外部目印による挿管技術に比較して早期合併症の可能性が低い。
【0119】
VAC/CVCは、現在は、長期静脈内抗生物質投与ならびに非経腸栄養投与、および血液サンプリングなどに使用される。
【0120】
市場における多種多様なVAC/CVCからの選択肢には、ヒックマン(商標)またはグローション(商標)のような1ルーメン、もしくは多重ルーメン、短期間用の“セントラルライン”皮下トンネル形成カテーテル、Port−A−Cath(商標)またはInfusaPort(商標)のような埋め込み式カテーテルがあり、さらに、末梢静脈穿刺(PICC)も入手可能である。
【0121】
ここに説明した本発明は、ほとんどのカテーテルに対し正確な位置付けを促し、もっとも有利なことに、最初に載置してから後、いつでもその正確な載置をチェックおよび確認することができる。
【0122】
図7は、対応する左右の腕頭静脈50および52それぞれに中間で交わる右鎖骨下静脈46と左鎖骨下静脈48を示す胴体の上部の静脈系の正面図である。
【0123】
腕頭静脈は心臓62の右心房60に入る前に大静脈心房結合部56に向かって下降する上大静脈54の上側領域で結合する。
【0124】
図9は、臨床医が見える画面上に示されるものであり、先端が上大静脈54の中央領域に理想的に位置する末梢静脈穿刺(PICC)の経路として構成されたトレース64である。また、図9は、胸骨66の外側を示しており、よって、画面に表示されているものと、患者の体の周知の目印との間の基準領域を臨床医に提供する。明らかに輪郭は一般的な胸骨を絵画的に描写したものであり、患者の胸骨ではない。この描写は、いずれにしても、臨床医が手元で行う仕事に対して有用である。
【0125】
PICCの載置中、患者の横隔膜上の器官の相対的安定性により、モニタ上に示されたトレースは、経腸栄養カテーテルに関して説明した引き戻りトレースと類似している。カテーテルの先端は、上大静脈にモニタ上に表示された二次元の経路のみでなく、先に挿入したガイドワイヤ上で進んでいる間に患者の胴体の上部の静脈系のさまざまな枝部を通して進んだその深さによっても確認できる。
【0126】
モニタより臨床医が最も明確に得られる情報は、カテーテルが鎖骨下静脈から腕頭静脈(図9の68)の中に移る際のその方向の激しい変化と、それに関連する深さである。
【0127】
前述のように、大人の場合、カテーテルの先端と、適切に位置付けされた測定機器との間の直線距離が約9cmになったときが、カテーテルの先端の最も好ましいとされる位置として独立して識別された測定結果である。検出装置が患者の正中線に沿った頚静脈胸骨切り込みの先端/正中線に位置させた時がそうである。
【0128】
こうした明示的な測定は、例示のみを目的としたものであり、装置の使用に伴う実際的な方法論であるが、すべての環境において完全に正確なものではない。しかし、このような測定は、前述したように、将来、測定する患者の数が増え、他の方法により立証され、さらなるデータが収集されて分析されるに従って、カテーテルの先端の適切な位置のインジケータとして医療的に受け入れられないともかぎらない。
【0129】
表示装置は、カテーテルの先端の前進が連続的であり、この実施形態においては、モニタ表示の中の形状66で示すように患者の胸骨の位置に対して常に表示されているため、臨床医にとって特に有用である。
【0130】
図10は、胸腔の上部の静脈系の一部を示すものであり、特に上大静脈まで延在するPICC70の載置を示す。
【0131】
前述の内容から、表示された人体の部位または部分は、明示的にそれに対する信号発信コイルの位置を特定するために使用するものではないが、ガイドとして使用されることが多いことは明らかであろう。
【0132】
臨床医はその時間の経過に伴う観測から、信号検出器によって判定した挿入したコイルの位置は、表示された記号ではなく、信号検出装置上の所定の位置に対して半径方向にXcmであることが分かる。プロセッサは、コイル位置の水平面(仰向けに寝ている患者を想定)の例えばXとYの座標を、画面上の画像として、また数値として提供することができる。
【0133】
信号検出装置自体が所定の体の部位または部分に対して一貫した位置にある場合には、表示されたそれぞれの測定結果は表示された基準画像を参照する。しかし、これは、絶対値となるということではなく、例えば人体の特定の器官または通路における実際の位置として臨床医が経験し、評価するものは、習得した専門知識の問題である。
【0134】
したがって、表示は二つのレベルで使用される。一つは検出装置の所定の点から正確な半径方向の距離Xまたは(X,Y)を求めることである。もう一つは、その位置測定値をその周知の身体の部位または部分と関連付けることである。(表示されたものとは異なる場合もある。)
【0135】
表示された体の部位または部分は単なる描写に過ぎない。これは、領域を示すためにのみ使用する。
【0136】
円弧状の線(図3,4、および5)は、前述のように、典型的な人間の横隔膜の縦断面の複雑は形状を示す。検出装置および表示装置で使用する電子装置は、検出コイルの上側のコイルが特定の骨の目印上に載置されたと仮定するので、表示装置は、二本の曲線の接続部の位置決めをし、それに従ってカテーテルのコイルの位置の測定結果を関連付ける。
【0137】
よって、表示が単なる指標であると認識した上で、明らかに目に見えるものに加え、プロンプトを示すことができる。これらのプロンプトは、臨床医に、信号発信コイルが患者の横隔膜を示す円弧状の線の上か、下かを知らせる。これらのプロンプトは、可聴信号でもよい
【0138】
例えば、患者の頭の端部が検出装置の正しい載置によって正しく判断されていると仮定した場合、表示されたコイル位置が円弧状の線の上方から近くなるに従って可聴音の周波数が上がる。さらに、表示されたコイル位置が表示された円弧状の線の下に進み、そこから離れるに従って可聴音は、その距離の増加に伴いパルスがゆっくりとなる。
【0139】
可聴信号は装置のユーザが好むタイプのものでよい。
【0140】
また、測定位置を誤った載置の可能性を示すために使用することもできる。この場合、表示装置の中に専門のシステム情報データベースに相当するもののプログラムを組む必要がある。理想的には、身体上の信号検出装置の所定の位置に関し、信号検出器から一定の半径方向の距離だけ離れた体内の領域を指定し、挿管中に測定すると、信号発信コイルが身体の好ましくない領域または部位にある、もしくは近づいていることを示すようにする。
【0141】
よって、臨床医が期待した位置測定を自然に感じ取るだけでなく、専門的な装置を使って発信コイルが前進してカテーテルが患者の不適切な領域に入ったことを臨床医に警告するためのバックアップとして使用することができる。この場合の指示はモニタの画面上の可視表示装置によるものでも、また追加の可聴信号によるものでもよい。人体は解剖学的には患者によってさまざまであるため、上記の方法はあくまでもガイダンスであり、医療上の経験に代わるものではないことを認識しておく必要がある。
【0142】
体の他の部分へのカテーテルの載置に関し、医療上の経験を積むに従い、モニタ上に臨床医に役立つ解剖学上の定常点、領域または構造体などの様な他の基準画像を重ねることができるようになる。追加の可視および可聴情報は、患者の中にカテーテルを挿入する資格を有する熟練した臨床医または登録した看護婦へのガイダンスとなる。
【0143】
本発明は、上記の特定な適用方法における使用に限定されるものではないことは、当業者にとって明らかであろう。また、本発明はその好ましい実施形態において説明した特定の要素及び/又は特性に限定されるものでもない。本発明の原理から逸脱することなく、様々な変更が可能であることは明らかである。よって、本発明は、請求の範囲におけるそれらの変更すべてを含むものと理解されるべきものである。
【図面の簡単な説明】
【図1】コイルと、その先端/遠位端近傍に位置する出口孔を有するカテーテルを示す図である。
【図2】先端/遠位端の近傍に位置するコイルを有するスチレットを示す図である。
【図3】患者の上の適した位置に置かれた検出装置と、身体の領域を描写した表示の概要を示す図である。
【図4】患者の説明図上に重ねたカテーテルもしくはスチレットの先端のコイルの位置および深さの表示を示す図である。
【図5】希望の位置まで移動していなくても、時間の経過と共に患者の腹部に位置するコイルの位置のみをを示す典型的な表示の図である。
【図6】患者内において、カテーテルの記録された経路と現在の位置の表示状態を示す図である。
【図7】胴体の上部の静脈系を示す図である。
【図8】患者の頚静脈胸骨の切り込みの先端/正中線にわたって好ましい状態で位置決めされたコイル位置表示装置の概要を示す図である。
【図9】患者の上大静脈内に正しく載置された中心静脈カテーテル(CVC)を描写した図である。
【図10】患者の胴体の上部を表す図であり、CVCの経路と、その先端が上大静脈の領域に位置しているところを示す図である。
(技術分野)
本発明は人体におけるカテーテルおよびコイル位置の発信方法に関し、特に、挿入時および体内および/または体内の経路での使用時にカテーテルの先端位置を継続的に判定する方法に関する。
【0002】
(背景技術)
本明細書においては、理解しやすいように、経腸栄養カテーテルの誘導および載置、さらには作業中のメンテナンスについて、例を挙げて説明する。しかし、ここで説明する技術および機器は、人体および動物の他の部分における同様の載置においても有効であることは、当業者にとって明らかであろう。カテーテルは、多種多様な目的のために使用されるとともに、多種多様なタイプがある。本発明による、人体での使用例は、中心静脈カテーテルの位置決め分野においても適用できる。
【0003】
経腸栄養物は、経口食物摂取とチューブによる胃腸管への強制的な栄養投与の両方を含む。経腸チューブ栄養は、食べない、食べてはいけない、または食べることができないが、胃腸管が機能している患者に使用する。経腸チューブ栄養の利点は、胃腸構造の維持管理ができること、機能的に統合されていること、栄養物の利用率が上がること、実施が容易で安全であること、などである。
【0004】
経腸チューブ栄養は、広汎性腹膜炎、腸閉塞により腸管が使用できない場合、難治性嘔吐、麻痺性イレウス、および/または代謝管理を必要とするひどい下痢などの患者に使用する。臨床環境に依存する他の潜在的禁忌には、ひどい膵炎、腸皮フィステル、胃腸虚血などが含まれる。経腸チューブ栄養は、初期の短小腸症の場合、または、ひどい吸収不良があるときには使用しないほうがよい。
【0005】
チューブ栄養のための経路は、栄養注入の予測継続時間、胃腸管の状態(例えば、食道の閉塞、胃または小腸の切除の前など)、および吸引の可能性などによって選択する。腸へのアクセスはベッドサイドでも(経鼻腸管、経鼻内視鏡胃瘻造設術)、手術室(胃瘻造設術および空腸造瘻術)でも行うことができる。
【0006】
経胃栄養注入用経鼻挿管が最も単純な作業であり、チューブ栄養に最もよく利用される方法である。この技術は、最終的には口から栄養を補給できるようになると思われる患者に対して行うのが好ましい。外径が小さく、やわらかいフィーディングチューブを使用するのが患者にとって最大の慰めであり、また患者に受け入れられやすい。十二指腸や空腸へのアクセスは、長尺のチューブで行うが、十二指腸や空腸に先端を載置するのはさらに困難であるとともに、時間がかかり、付加的な危険要素を伴う。
【0007】
経腸チューブ栄養は、機械的感染や、代謝性合併症が非経腸的栄養補給でみられるよりも少ないため、非経腸的栄養補給より安全であると考えられる。しかし、経腸栄養注入も問題がないわけではなく、挿管や栄養注入を、技術的に熟練していない、または経験の浅い者が行った場合、もしくは監視が行われていなかったり、あるいは不適切であったりした場合にはかなりの感染症が起こりうる。
【0008】
フィーディングチューブの載置が不適切であることが、数多くの合併症の一因である。もっとも深刻なのは、カテーテルを循環系もしくは肺まで経鼻挿管している間にカテーテルを意図せぬ位置に載置した場合である。これらの状況は、ともに、経験の浅い医療従事者が挿管を行った場合に起きる可能性がある。挿管中は、スチレット(比較的硬く細いワイヤ)を使用して弛緩したカテーテル管を硬化させ、支持する。
【0009】
フィーディングチューブの出口孔(一般的には遠位端/管の先端)が、栄養注入の間、希望の位置に留置されていることをチェックすることが大切である。この要求事項に対応するためのプロトコルは、栄養液を搬送していない間にフィーディングチューブから抽出した流体のpHが適当であるかを頻繁に監視し、栄養の摂取が期待どおりに行われているかをチェックするために注意深く患者を監視することを含む。
【0010】
チューブの先端/遠位端の位置を判定するためにしばしばX線が使用される。しかし、X線でさえ、その位置を判別するのに必ずしも決定的なものとはいえない。内部の器官の自然で連続的な動きにより、時間の流れとともにカテーテルの位置が変わってしまう可能性があるため、医師にとっては、X線がチューブの先端/遠位端の位置を確実に示していると判断するのが難しくなる。
【0011】
カテーテルの種類はさまざまであり、その名称は時として、その使用法、挿入して処理する体の部位を示し、あるいは、その使用の方法論を確立した医師の名前にちなんでつけられる。
【0012】
さらに、本発明は中心静脈カテーテルのためのカテーテルの位置決め法とその手段に関する。
【0013】
静脈内カテーテルは皮膚の開口から静脈系の数多くの枝部の一箇所以上を通して治療の必要な箇所まで押し込み、患者の内部にアクセスするものである。これらのタイプのカテーテルは、静脈アクセスカテーテル(VAC)および中心静脈カテーテル(CVC)とも呼ばれ、一般的に循環器系で使用される。
【0014】
静脈内カテーテルのサブカテゴリーは、末梢静脈穿刺(PICC)に所属する。これらのカテーテルは、その挿入に関し、長い間臨床医によって使用され、数多くの異なる技術が存在する。
【0015】
その挿入技術の一つに、セルディンガー法があり、装置と材料の進歩に伴い、現在は改良されたセルディンガー法が存在し、特に細い、または貧弱な静脈に有効である。
【0016】
体内に挿入する際に使用する静脈内カテーテルには、例えば長さ1.5から3インチの末梢カテーテル、長さ3インチ以上の挿入に使用する中線カテーテル、さらに長いものとして、鎖骨中央、皮下トンネル非形成鎖骨下、皮下トンネル形成グローション、ヒックマンおよびブロビアック、または皮下埋め込みポートなど、多くの選択肢がある。
【0017】
静脈内カテーテルに共通しているのは、体内から静脈内にガイドワイヤを通し、医師の技術で希望の箇所まで誘導することである。ガイドワイヤが定位置につくと、カテーテルをその外部の自由端からスライドさせて挿入し、カテーテルの遠位端がガイドワイヤの端部に届くまで押し込む。
【0018】
これらのタイプのカテーテルの先端の位置決めまたはガイドワイヤの体内への前進を記録する方法は数多く存在する。
【0019】
カテーテルの先端もしくはその近傍にあると考えられる液体を取り出してそのタイプをチェックするための戻りチェックと、カテーテルの内部に挿入したワイヤ上の目盛りのチェックを使用してチェックする方法の二つが、一般的に他の手段が簡単に手に入らない医師が使用する方法である。ガイドワイヤまたはカテーテルの先端または経路の位置を必ずしも正確に判定することができなくても、超音波誘導、X線透視法およびX線方法論が好ましい。
【0020】
さらに費用がかかり、時間を必要とするCT検査は、上記の判定に加え、先端だけでなく、患者の体内に位置する上記した、およびその他のいかなるタイプのカテーテルの経路をも判定することができる。
【0021】
カテーテルの先端/遠位端の最終位置は、カテーテルの使用目的の有効性にとって最も重要なものである。ある例では、心臓への薬剤の直接投与は、上大静脈(CVC)にカテーテルの先端/遠位端を位置決めすることによって確実に行うことができる。研究の結果、カテーテルの先端/遠位端を上大静脈の上部(一般的に大静脈と心房との接合部から4.5cm以上上方であることから識別できる)に位置させるのが好ましいことが分かっている。また、研究の結果、これらの好ましい位置では、カテーテルの不具合が最小限に抑えられることが分かっている。
【0022】
しかし、研究の結果、カテーテルの不具合と、カテーテルの先端を上大静脈に隣接する静脈系内に位置させることとの間に大きい関連があることが分かっており、さらに大切なことは、カテーテルを確実に上大静脈自体の内部に位置させることなのである。
【0023】
図7には、上大静脈を含むその近傍の静脈を示している。
【0024】
例えば、カテーテルの先端が、腕頭静脈または腕頭静脈の接合部近傍のいずれかにある場合、カテーテルの先端が上大静脈内にある場合に比較して、フィブリンシース(fibrin sheath)を誤って展開してしまったり、あるいは、カテーテルの先端もしくはその周辺に血栓が存在していたりする可能性が高い。カテーテルの先端が、鎖骨下静脈または大静脈と心房との接合部または右心房内にある場合に、誤った展開の可能性が高くなる。
【0025】
カテーテルの先端が不適切な位置にある場合、もしくは理想的でない位置にある場合、明らかに本来ならば管理可能な寿命を縮める結果となるが、さらに深刻な影響としては、血栓症および静脈炎があり、特に、気胸感染およびさらに深刻な状況としては閉塞がある。
【0026】
研究の結果、カテーテルの先端が血栓によって妨害された場合、このように誤って展開されることのないカテーテルに比べるとその寿命が著しく縮まることが分かっている。
【0027】
静脈内カテーテルを使用する必要がある場合、患者を適切に治療するには、多数の要素を考慮しなければならない。場合によっては、薬剤を投与する利点と上記のような感染に関する静脈内装置の悪影響の発生の可能性とをはかりにかける必要もある。
【0028】
カテーテルの選択は、単純な問題はなく、次のような要素を考慮しなければならない。
・投薬のタイプ
・注入する溶液のオスモル濃度およびpH
・必要な治療の期間
・二次的危険要素および持病
・患者の年齢、活動、仕事、生活様式
・将来的な静脈注射の必要性および長期的な病気の予後
・現在の利用可能度、アクセスする静脈の状態(特に手足の末梢静脈)
・患者の神経性疾患歴、静脈またはリンパ系に影響のある手術歴、血液疾患歴、血栓歴およびこれまでの静脈注射の使用歴など
・現在の患者の診断および治療の希望
【0029】
治療の予想期間が5日未満であるならば、短い局所カテーテルが好ましく、4週間未満であるならば中線カテーテルが一般的に適している。
【0030】
鎖骨中央線も選択肢のうちの一つであるが、上大静脈以外の鎖骨下領域に不適切に載置した結果、血栓が起こる例が多くなってきたため、より一般的に使用されるようになってきている。
【0031】
実際、鎖骨中央線は、確認的X線の時間とコストを削減するために、自宅治療形態において多く使用される。しかし、鎖骨中央線の場合でも、上大静脈の下側三分の一の部分の上大静脈と右心房との接合点の近傍に最適に載置する必要があり、さらに右心房には入ってはならない。
【0032】
上述の、先端位置を上大静脈内とする末梢静脈穿刺カテーテル(PICC)は、長期間(5日から1年)の治療に使用することができる。しかし、全体的に満足のいく確かな位置チェック法ではないが、X線によってその先端の位置決めを厳しくチェックしなければならない。
【0033】
よって医師にとってまさに必要なのは、カテーテルが患者の体内の希望の位置に載置されていること、そして、そこに留置されていることをより確かに確信できることなのである。それが、経腸、非経腸栄養補給、発泡性化学療法薬剤、抗生物質、血液採取または他のいずれを目的としたものであっても同じである。
【0034】
(発明の簡単な説明)
本発明は、おおむね、対象患者の体に挿入されるカテーテルにおいて使用する、信号エネルギーを発信するコイルの位置を表示する方法であり、前記方法は、少なくとも二つの信号エネルギー検出器を有するとともに前記対象患者の体の所定の位置または部分に対して位置決めされたコイル位置測定手段を使用する工程と、前記コイル位置測定手段よる位置測定結果を表示する工程と含み、前記位置測定結果は、前記位置測定手段に対して臨床医が前記対象患者の体の内部において、前記対象患者の体の所定の位置または部分に対する前記コイルと前記カテーテルの位置を判定するために使用する。
【0035】
本発明の更なる局面によると、前記方法は、更に、前記位置測定結果により、前記表示された位置測定結果に関連付けた、臨床医が前記対象患者の体における前記コイルと前記カテーテルの位置を判定する為に使用する非対象人体の部分または領域を表す工程を含む。
【0036】
本発明のもう一つの局面によると、位置測定手段は、前記人体の剣状胸骨結合部上又はその上方の所定の位置に関連付けて位置させ、消化管の中に挿入したカテーテルと共に使用する。
【0037】
本発明のもう一つの局面によると、非対象の人体の横隔膜を表す体の部位の領域又は描写が表示され、前記表示装置に人体の上下の胸腔が描写される。
【0038】
本発明の更にもう一つの局面によると、位置測定手段は、前記人体の頚静脈胸骨切り込みの先端/正中線上若しくは上方の所定の位置に関連付けて位置させ、心臓血管または呼吸器系の中に挿入したカテーテルとともに使用する。
【0039】
本発明のもう一つの局面によると、人体の胸骨を表す前記人体の部位の領域もしくは描写が表示され、よって前記表示装置に人体の骨格の上部が描写される。
【0040】
本発明の更にもう一つの局面によると、前記方法はさらに、前記コイルの位置測定結果を所定の時間間隔で表示する工程を含む。
【0041】
本発明のもう一つの局面によると、コイルはカテーテルとともに使用するように構成されたスチレット又はガイドワイヤに組み込まれている。
【0042】
本発明のもう一つの局面によると、前記方法は、更に、前記スチレットまたはガイドワイヤがカテーテルから引き戻されている間に前記コイルの位置を所定の時間間隔で表示して、前記コイル及び前記カテーテルの経路を追跡、表示する工程を含む。
【0043】
本発明のある局面によると、コイルがカテーテルに組み込まれており、人体内の前記カテーテルの位置を示すために使用可能である。
【0044】
本発明のもう一つの局面は、カテーテルと共に使用可能であり、第1の端部と第2の端部を有するワイヤと、ワイヤの第1の端部と電子通信を行うプロセッサと、ワイヤの第2の端部に接続してあり、対象患者の体の様々な箇所に位置せしめられる発信コイルと、プロセッサと電子通信を行い、対象患者の体の所定の部分に関連して位置決めされるように構成された検出装置と、少なくとも一つの所定の画像を表す少なくとも一つの基準画像を指定するプロセッサが検索した基準データと、対象患者の体の中の発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定するプロセッサによって生成する指示データと、指示画像と基準画像を表示するプロセッサと電子通信を行うモニタとを備えた、ユーザが対象患者の体の中にカテーテルを載置する作業を補助するためのカテーテル位置表示装置である。
【0045】
本発明のもう一つの局面は、(a)コイルと電子通信を行うプロセッサと、(b)信号を発信すると共にコイル位置決め装置、スチレット、ガイドワイヤ、または前記カテーテルに組み込まれた、対象患者の体の内部のさまざまな箇所に位置せしめられる発信コイルと、(c)プロセッサと電子通信を行う検出装置と、(d)対象患者の体の少なくとも一つの所定の部分を表す少なくとも一つの基準画像を指定するプロセッサによって生成される基準データと、(e)対象患者の体における発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定するプロセッサが生成する指示データと、(f)指示画像と基準画像を表示するプロセッサと電子通信を行うモニタとを有するカテーテル位置表示装置と共に使用するように構成されたカテーテルであって、前記カテーテルは、スチレット又はガイドワイヤを受容するように構成されているか、コイルが組み込まれたチューブを備え、チューブは近位端と遠位端を有し、先端は遠位端に含まれる。
【0046】
本発明の更にもう一つの局面は、カテーテル内に挿入可能であり、近位端と遠位端を有するマルチストランドワイヤと、前記ワイヤの二本のストランドの遠位端に接続した発信コイルと、少なくとも二個の受信コイルと、モニタと、ワイヤ、受信コイル、及びモニタと電子通信するプロセッサとを備えたカテーテル位置表示装置であって、プロセッサは、少なくとも一つの基準信号を受信コイルが対象患者の体の少なくとも一つの所定の骨の目印に対して位置決めされた後に、少なくとも二つの受信コイルから受信するとともに、基準データを検索し、モニタを駆動して基準データを図で表示し、発信コイルを対象患者の体に挿入した後に発信コイルから信号を受信する少なくとも二つの受信コイルから少なくとも一つの指示信号を受信すると共に、指示データを生成し、モニタを駆動して、指示データを図で表示する。
【0047】
カテーテルを対象患者の体の中に適切に載置しやすくする為のもう一つの方法は、
(a) 対象患者の体の所定の目印に対して位置付けされた、少なくとも一つの受信コイルの位置を示す少なくとも一つの基準信号を受信する工程と、
(b) 対象患者の体に挿入した発信コイルから少なくとも一つの指示信号を受信する工程と、
(c) 所定の目印に伴う基準データを検索する工程と、
(d) 基準データから引き出した基準画像を表示する工程と、
(e) 対象患者の体上または上方の少なくとも二つの受信コイルの位置の相対位置を示す指示信号によって表されるデータを生成する工程と、
(f) 指示データが表す図を表示する工程と、
(g) 指示信号の変化を受信した後、工程(e)と(f)を繰り返す工程とからなる。
【0048】
更なるカテーテル位置表示装置を操作する方法は、
(a) 検出装置の所定の領域を対象患者の体の所定の目印上に載置する工程と、
(b) カテーテル、スチレット、ガイドワイヤ又は発信コイルを埋め込んだコイル位置表示装置を対象患者の体に挿入する工程と、
(c) 所定の部位または部分の図形表示、もしくは、基準画像の表示をモニタ上で見る工程と、
(d) モニタ上で発信コイルの図形表示を見る工程と、
(e) 図形表示の相対位置の表示を利用して、対象患者の体の中でカテーテルを操縦する工程と、を備えてなる。
【0049】
本発明の更にもう一つの局面は、カテーテル位置表示装置と共に使用するワイヤの束を備え、(a)ワイヤの束の近位の端部の所定の部分と電子通信を行うプロセッサと、(b)ワイヤの束の遠位の端部の所定の部分と接続され、対象患者の体内でさまざまな箇所に位置せしめられる発信コイルと、(c)プロセッサと電子通信を行い対象患者の体の所定の部分に関連付けて位置決めされるように構成された検出装置と、(d)少なくとも一つの所定の画像を表す少なくとも一つの基準画像を指定するプロセッサによって検索された基準データと、(e)対象患者の体おける発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定するプロセッサによって生成される指示データと、(f)指示画像と基準画像を表示するプロセッサと、電子通信を行うモニタを備え、
前記ワイヤの束は、
可撓性チューブの位置決めを制御するように構成された所定の堅さを有する第1のワイヤと、
発信コイルとプロセッサとの間で信号を伝送するように構成された第2のワイヤと、
第2のワイヤを第1のワイヤに固定する為の手段とを備えている。
【0050】
本発明の特定の実施形態について、添付の図面を参照しながら更に詳しく説明する。これらの実施形態は、説明のみを目的としたものであり、本発明の範囲を限定するものではない。
【0051】
他の実施形態の提案と説明が本発明の説明に含まれるが、添付の図面には示していない。また、本発明の代替の特徴を図に示すが、明細書内では説明していない。
【0052】
(本発明の実施形態の詳細な説明)
図1は、先端/遠位端の近傍に、米国特許5,099,845号に説明するものと類似した装置によって検出することができる信号を発するために使用するコイルを有する1ルーメンカテーテルを示す図である。この特許は、マイクロニックスPty Ltd.による特許であると共に、本明細書内で引用して参照している。上記の特許の引用は、当業者共通の一般的知識として入っている明細書の内容を認めるためのものと解釈してはならない。
【0053】
上記の特許で説明されている本発明の装置は、カテーテルの端部に位置するコイルの深さと位置と、その向きとを判定するための手段を提供している。カテーテルのタイプは、発明の原理と方法にとって重要ではない。
【0054】
深さおよび位置判定装置は、ここでは、検出装置ともよぶが、おおむね、上記の明細書内で開示されたタイプのものであり、ここで説明する方法に使用することができるが、必要とされる特性を提供することができるのは、この装置に限らない。
【0055】
図1に示すカテーテル10は、出口孔14が詰まりにくいように設計された、適した先端形状12を有しており、特に非経腸的栄養補給に使用するのに適している。図示のカテーテルは1ルーメン(近位端から先端/遠位端まで通路が1本)であるが、他のカテーテルは、複数のルーメンを有しているものでもよい。
【0056】
コイル16は、先端12およびカテーテルの長さ分延在する対のワイヤの二つの端部の近傍に位置する。対のワイヤはカテーテルの近位の端部の近くのコネクタ18まで続いている。カテーテルへの入口孔20は、カテーテルの最近位の端部に位置している。カテーテルの先端/遠位の端部が患者の内部の適切な位置に到達すると、この孔を通して希望の時間に希望の速さで栄養が送り込まれる。
【0057】
異なる用途に対して使用するカテーテル用のコネクタは、それぞれ寸法、接続タイプおよび色が異なり、できるだけ安全に使用できるように構成されている。適用方法が異なるカテーテルの相互接続を、不可能とはできないまでも困難にすることによって、意図する用途の違うカテーテルによって患者に誤った、または不適切な流体、特に薬剤を誤って投与する可能性を最小限に抑えることができる。
【0058】
カテーテル10を、患者の胃腸管の中に挿管する際、金属のスチレットをカテーテルの中で使用する。
【0059】
スチレットは、前述の対のワイヤを備えるか、もしくは対のワイヤを組み込んだ、典型的なスチレットワイヤ(単数もしくは複数)を備えていてもよい。スチレットは、意図した用途に適していると知られた材料の中に封入することができる。スチレット自体は、一般的にはステンレス鋼から形成するが、図2に示すようにプラスチックまたは他の適した材料から形成してもよい。
【0060】
ある実施形態では、プロセッサをワイヤの束の近位の端部に接続し、コイルをワイヤの束の遠位の端部に接続する。ワイヤの束には、信号搬送ワイヤ(単数もしくは複数)に適当に結合したガイドワイヤが含まれる。束は、その端部およびその長さに沿って相互に結合されており、意図した用途に適していると知られた材料に封入することができるのが好ましい。また、束は、例えば、共に包み込んでも、適した材料で包んで、適した接着剤または締結材、もしくは適した寸法および形状に形成してもよい。図2を参照のこと。
【0061】
挿管は、患者の口または鼻の通路を通して行うことができるのが好ましい。スチレットは、その他無定形のカテーテルを強固にし、その全長にわたり、またその近位の端部で操縦できるようにし、その先端/遠位の端部を保健専門家もしくは挿管に熟練したスタッフが患者の内部の適当な経路内で操縦する。
【0062】
本明細書内では、挿管を行うのは臨床医であると記述しているが、熟練した保健専門家も、さまざまな用途で患者にカテーテルを挿入することができる。また、一般的に、適した流体を投与するために使用する単一のルーメンを有するカテーテルの先端/遠位端もしくはその近傍においてカテーテルの壁内に組み込んだコイルを有する、適度な堅さのカテーテルを使用することもできる。
【0063】
発明者は、経済的かつ実用的であるという理由から、カテーテルの中に一体化したコイルの配置したものを利用できるということに気づいた。しかし、スチレットを使用して発信コイルを支持するという、ここで述べる代替の配置の方が好ましい。
【0064】
その理由は、医療機器は高水準を求められることから、カテーテルとコイルを組み合わせるには、製造にコストがかかるからである。カテーテルの製造業者は、専門家のための製品を提供することから、その製品のコストを著しく引き上げるような変更は彼らの利益にはなるとは限らない。
【0065】
さらに、カテーテルとコイルの組み合わせとしての用途は一つしかないため、コイルの負荷価値は回復不可能であり、よって、より時間がかかるものであってもX線を含む現在の探知技術と競合する必要があるのである。
【0066】
よって、コイルをスチレットの先端/遠位端に組み込むことが可能であることを確認した。
【0067】
スチレットは、カテーテルの先端/遠位端を希望の位置に操縦するだけでなく、引き戻すこともでき、また、要求されるプロトコルに従って、適切な汚染除去および洗浄後に再使用することができる。発明者は再使用に関連するプロトコルが確立しない限り、再使用は推奨しない。
【0068】
コイルの深さと位置は、挿管工程中に判別することができる。さらに、カテーテルの先端を位置決めするために使用した場合、そしてそれに続いてカテーテルの先端/遠位端を適当に位置決めした場合、カテーテルの経路はスチレットをカテーテルから引き出している間に判定できる。スチレットを引き出した後に表示されたトレースの例を図6に示す。その詳細は、本明細書内で後述する。コイルを一体化したスチレットは、患者内における、カテーテルの長さに沿った特定の位置を判別するのにも使用することができる。よって、複数のポートをその長さ方向に有する複数のルーメンを有するカテーテルでは、患者内におけるそれらポートの位置をそれぞれ判別することができる。
【0069】
スチレットの端部に設けるコイルの製造は、ありふれた作業ではないが、自動化して、ほんの数種類の異なる材料で製造することができる。多種多様な材料やプロセスは、上記のようにカテーテル/コイルの組み合わせを製造する場合には関係ない。
【0070】
上記のように、コイルがスチレットの中に組み込まれることによる特別有利な特性は、スチレットとコイルをカテーテルから引き出している間、位置決め装置がカテーテルが通った患者の体内の経路を記録することができる点である。X−Y位置およびその検索装置に対する深さを含み、その経路を記録することができる。最も便利なのは、カテーテルの経路が患者の解剖学に直接関連付けるように表示することができることである。本明細書で後述するように、検出装置を患者上に適当に位置決めすることにより、モニタ上のトレースの位置を参照して患者の内部における位置を確認することができるようになる。
【0071】
その結果、カテーテルの先端/遠位端の位置を再チェックおよび先でのカテーテル経路を逆戻りする作業を容易に行うことができるとともに、カテーテル先端の位置に関する早期の記録と比較することができる。
【0072】
さらに、表示される経路は、カテーテルが実際に希望の経路と通ったことを臨床医が確認しやすいような特徴を有する。
【0073】
時間の経過に伴って、深さの情報を含む表示は、位置決めの修正に関する他の医学的観察と相互に関係しており、よって臨床医は、経路と最終的な載置が予定通りであるという確信をより高めることができる。
【0074】
表示された経路により、予測した解剖的変異の範囲内で、カテーテルの先端/遠位端もしくはカテーテルのその他の部分が患者の希望の領域に位置していることを確認できる。例えば、経腸栄養カテーテルを位置決めするときの希望の領域は、図6に描写して示すように空腸の近傍である、などである。
【0075】
また、これらの技術を挿管工程で使ってカテーテルが通った経路をすぐにフィードバックすることもできる。
【0076】
ここで説明した技術は、カテーテルの載置を補助するものであり、長期の栄養補給に管腸造瘻術が必要である場合、もしくは閉塞により、経鼻挿管が不可能な場合に特に適用できる技術である。従来の胃瘻造設術または空腸造瘻術は、外科的処置を必要としていたが、これは明らかに、そして、好ましいことに、避けることができる。
【0077】
経胃栄養チューブの経皮内視鏡的載置は、ベッドサイドで、または内視鏡室において通常の麻酔を行わずに実施できる。空腸の延長も、胃用ポートを、幽門空置術後の経腸栄養注入が必要な患者に経皮的に載置することによって確認することができる。また、開腹の際に載置したニードルカテーテルまたはウィッツェル空腸造瘻術により、小腸の方が胃や大腸より術後のイレウスによる影響が少ないため、早期に術後の栄養注入が可能となる。空腸栄養注入は、経胃栄養注入に比較して嘔吐物吸引の危険性が最小限となる。
【0078】
しかし、ここで説明した技術は、残留胃液のチェックを管理、監視するための技術に代わるものではない。患者の医学的監視は継続しなければならない。しかし、この技術により、コストと時間のかかるX線設備の使用、専門的技術、またはその他のさらにコストと時間のかかるカテーテル位置決め作業が、軽減もしくは不要となる。
【0079】
図2は、先端/遠位端にコイル24を有するスチレット22と、コイルを形成するワイヤの近位端がコネクタベース26内に位置し、操作ブロック28がスチレットの最近位端に設けられているところを示す。スチレットの形状は、一般的に長尺でまっすぐであるが、図2に示すものは図1に示したカテーテル10に対応した形状となっており、これは説明の便宜上そのようにしただけである。臨床医は、スチレットを捻って、先端/遠位端をカテーテルの内部および内側端部に載置した時にカテーテルの先端/遠位端を回転させて患者の体内のさまざまな通路および孔を通して操縦できる。このスチレットを捻る作業は推奨できるものではないが、文字通り臨床研修では知られた作業である。
【0080】
図3は、患者の躯体28を前から見た図であり、患者の体内における、検出装置の三つの検出コイルの好ましい位置を三つの○印で示している。
【0081】
検出装置の外形は、実際の検出器が作動する方法にとって取るに足らないことではあるが、発明者は、その外形によってはその検出装置を患者の体の所定の位置上もしくは上方に適切に位置させやすくなると考える。例えば、三角形状であれば装置の頂点を患者の頭部に向けて載置すれば、装置の長手の軸を患者32の正中線と一致させることができる。
【0082】
丸印30が三つの検出コイル部の最も重要な部分であり、この実施形態では、カテーテルを消化管(人体の消化系の部分であり、制限なく、咽頭、食道、胃、および腸を含む口から肛門まで延在する粘膜を有する管)、あるいは特に腸管に載置するため、直接剣状の胸骨結合部上に載置する。これにより、三つの検出コイルの長手の軸が体の正中前後方向に延在する面32(正中線)と一致する。特に剣状胸骨結合部は一般的に鼓動しやすいため、臨床医が位置決めしやすいように、三つの検出コイルの長手の軸は検出器のハウジングのケース上に彫り込んである。
【0083】
剣状胸骨結合部は、横隔膜が人間の骨格に結合されている点である。図に示された二本の円弧状の線(34および36)は、腹部と胸郭を分離する筋膜隔壁(横隔膜)の非常に複雑なドーム型の上限であり、主要な胸筋として作用する。
【0084】
これら二本の円弧状の線34および36は、図5および6に示すように、正中線32とともにモニタに表示されているため臨床医がカテーテルを戴置するのに役立つ。
【0085】
円弧状の線34および36の表示は、上記の方法の検出コイルの正確な位置決めに役立つことは明白である。丸印30の中のコイルの位置と剣状胸骨結合部の相関関係により、すべての患者に共通する人体の部位に対するコイルの位置および深さを監視することができるようになる。検出装置は、装置の外郭を、コイル30を剣状胸骨結合部上以外の場所に載置する特定の方法で位置決めした場合に置き得る所定のオフセットは許容できるため、コイルを目印となる特定の骨と一致させなければならないわけではない。
【0086】
この装置は、特定のコイル30が上記のような方法で正確に位置決めできなかったとしても、比較的有効である。二つ以上の信号検出要素を、人体の所定の部位または位置に関連して人体のある箇所に位置させることが重要なのである。よって、ガイドワイヤもしくはカテーテルの端部のコイルの位置が表示された場合、それは、臨床医の載置作業に役立つよう、周知の人体の部位または部分のおおよその位置に関連して表示することができるのである。
【0087】
二本の円弧状の線34および36が、複雑な横隔膜の形状を単純に示したものであることは明らかである。その表示の少なくとも一部が、横隔膜の剣状胸骨との接合点と一致しているので、それらの線は、モニタ上に正確に表示され、臨床医にとって十分に役立つ情報である。センサによる測定を参照すれば、その表示は少なくともカテーテルの先端/遠位端が横隔膜の下もしくは上に位置しているという確信を臨床医に与えることができる有用なガイドとなる。検出コイルの所定の位置決めを基準として、人体の部位もしくは部分を同様にモニタ上に表示してもよい。
【0088】
腸の挿管では、多くの場合、カテーテル/スチレットの先端/遠位端が、横隔膜の形状を表した二本の円弧の下まで通過したことが表示されることにより、臨床医は、カテーテルが患者の気管および/または肺の中ではなく、胃腸管の中にあることを確認することができる。まさに、カテーテルの先端/遠位端が間違えて肺の中に入ると、カテーテルの先端/遠位端は、予測経路から離脱してモニタ上に表示される。
【0089】
予測経路からの第1の主だった離脱は、二本の円弧の上方10cm位の箇所で起こりうる。すなわち、剣状胸骨結合部上の、気管分岐レベル近傍である。これは、正しい経路から予測されていたより人体の深いところにあるとも考えられる。図4に示す経路は、経腸挿管に関するものであるが、図示の領域38でおおよそ示される胃の中に入っているところである。カテーテルは、平均的に移動し、40の位置で正中線と再び交差し、幽門から十二指腸の領域42の第1の部分に入る。十二指腸の領域42を通過すると、カテーテルは、小腸の部分に相当し、十二指腸から回腸まで延在する空腸領域44を通る。
【0090】
本検出法および装置を使ってカテーテルの特定の部分の位置を検出することもできる。例えば、先端においては経腸栄養注入を行い、その全長にわたって胃の中のガスを減圧する二重空洞カテーテルは、その先端/遠位端を理想的に空腸と減圧する空洞の中に延在させ、幽門から外に出ないようにしなければならない。カテーテルの減圧空洞の始まりが、カテーテルの遠位端から周知の距離の位置にある場合、コイルを先端に有するスチレットをカテーテルの遠位端からその周知の距離だけ引き戻せばよい。発信コイルの位置がその結果検出され、予測していた位置測定結果と比較され、カテーテルが患者の内部に正しく位置しているかどうかが示される。
【0091】
もう一つの例では、カテーテルの長さに沿って位置する吸引もしくは圧力測定ポートが患者の体内の希望の位置にあるかどうかを有利に判定することができる。これは、挿管の場合だけでなく、カテーテルの使用中にも可能である。
【0092】
患者内の実際の箇所、領域、または構造体に相関する基準点(単数もしくは複数)をモニタ上に有することが有利であるのは明らかである。この特性は、腸内挿管中に有効であるが、一般的に中心静脈カテーテル(CVC)としてよく知られた静脈アクセスカテーテル(VAC)を位置決めする場合にも有利である。それらカテーテルの一部について、そして、その位置決めについては本明細書で詳しく後述する。
【0093】
人体の内部のカテーテルの経路の監視および処置中の正しい位置決めの再チェックは、ここで説明するカテーテル位置決め装置によって可能となる。有利なことに、VAC/CVCの先端/遠位端は、胸部の上部の位置に載置されるため、体内の動く器官に直接接触していないことから、不安定な動きは少ない。患者の呼吸による動きもカテーテルの先端の位置の表示に影響するが、この方法ではずっと少なくなっている。
【0094】
線または記号(例えば横隔膜の表示など)を示すモニタ表示は、臨床医を補助し、カテーテルの先端/遠位端の経路と最終位置が正しいという確信を高めることができる。しかし、表示された線または記号がトレースに対して正しく位置決めされ、カテーテルの患者の体内での位置を適切に反映するように検出コイルを所定の基準点に対して正しく位置決めすることが重要である。
【0095】
CVCを前述のカテーテルタイプまたは方法によって挿入する場合、検出装置をはっきりと決められた、好ましくは骨の目印上に位置させるのが好ましい。この例では、検出装置の三つの検出コイルのうちの所定の一個をその目印の上に置いている。中心静脈カテーテルの先端/遠位端を患者の上大静脈の中に位置させる場合には、図8に示すコイル30を正中線に沿って延在する頚静脈胸骨切り込みの先端/正中線に位置させるのが好ましい。
【0096】
可能な検出装置の形状31も、図8に示す。装置の形状は、平面視で三角形であり、前述したように患者の胸の上で使用するのが好ましい。この形状は、臨床医が使いやすい形状である。なぜなら、その頂点33は、頚静脈胸骨切り込みの先端/正中線に位置しており、その長軸は患者の正中線32と一致する。
【0097】
検出装置を好ましい場所に位置決めするため、装置の外側ケースには、患者に対し、この特殊な形状を好ましく方向付けるため、下の角部に“左”“右”とそれぞれ記されている(図示せず)のが好ましい。さらに、患者の正中線と視覚的に合わせることができるように長手の軸に沿って延在する線を記しておく、または彫っておくとよい。しかし、一般的な使用法であろうと、患者側の事情にあわせた使用法であろうと、人体の他の部分で使用するのに適した、異なる形状のハウジングを有する検出器としてもよい。
【0098】
頚静脈胸骨切り込みの先端/正中線は、臨床医が検出装置を置くのに最適な場所である。なぜなら、そこは、すべての人間において共通の場所であると共に、視覚的に分かりやすく、患者の肉体的状態に関係なく鼓動する場所であるからである。しかし、この目的のため、骨の解剖学的目印として使用できる骨の箇所または人体の領域は、頚動脈胸骨切り込みのみではない。人体には他にも、所定のオフセット位置に測定機器を容易に位置決めまたは位置直しができる箇所もある。この配置により、モニタを基準点もしくは基準物を表示するために使用することができ、臨床医にとって有効な、人体の部位と同じ形状とするのが好ましい。カテーテルやガイドワイヤを挿管する、もしくは先に位置決めしたスチレットを入れて引き出したカテーテルの位置をチェックする際などである。
【0099】
経腸もしくはCVCに使用するカテーテル/ガイドワイヤの経路を図4,6,9,10にそれぞれ示す。これらの経路は、理想的に示された経路である。これらは、カテーテルを経腸栄養注入もしくはCVC位置決め用カテーテルの挿管工程で位置表示装置を使用している間に臨床医が必ずしも見えるとは限らない。
【0100】
実際は、信号発信コイルの現在の位置と深さは、図5に表示されている状態のほうがより近い。
【0101】
患者の生体のある領域に使用した場合、経腸栄養カテーテルの先端/遠位端のコイルは、患者の内部器官の無意識の動きによって移動し続ける。これは、呼吸(横隔膜の動き)という単純な動きによるものである。また、蠕動(胃、十二指腸、空腸などの管状の器官の長手および円形の筋肉繊維が内容物を押し出す動き)によるものである。さらに、動きの程度は、ずっと小さいが、胸腔の上部の器官に挿管したときなど、挿管工程で起きうる、避けられない他の動きもある。
【0102】
最も有効な表示形態を提供するためには、連続的な矢印の描写(現在のコイルの位置、深さおよび向きを示す)の間の遅延と、臨床医にとって必要なコイルの動きの表示との間でバランスをとることが必要となるのは明らかである。間隔があまり長すぎると、コイルは、画面に記録され、臨床医に表示される前に間違った経路に沿って受け入れられない距離を進んでしまう可能性がある。逆に間隔が短すぎると、上記のような動きの要素によってジャンプする矢印で画面が一杯になってしまう。いずれの場合も、臨床医の助けになるどころか混乱させて誤った方向へ導きかねない。
【0103】
理想的な遅延が、医学的には究極の選択であり、装置は、臨床医によって希望の表示特性を示すように調整可能である。このような遅延は、CVCカテーテルが挿入されたとき、または体内の他の領域に挿入されたときなどによって異なる。
【0104】
連続的に表示された位置を示す印の量は、医療上の好みの問題でもあり、図5に示す例では、14の位置が連続的に一度に表示されている。表示の最後尾は、患者の内部の器官を通ってコイルの経路が進むにつれて消え、画面上に表示される印を最低数に維持する。そうでないと、モニタが印で一杯になってしまい、カテーテル/ガイドワイヤの先端/遠位端の動きと現在の位置とを確認するのが困難となる。異なる色で新しい印、最終の印、そして、中間の印を表示しても、臨床医にとっては有利であろう。
【0105】
経腸栄養カテーテルの場合、カテーテルの先端/遠位端を、経腸栄養注入に最も適した空腸の領域に位置させたら、ガイドワイヤを抜くことができる。この時点で、位置および深度検出機器を記録モードで使用することもできる。
【0106】
ガイドワイヤが例えば3秒以上引っ張られると、モニタを使ってコイルがそのとき適した位置にあるカテーテルの経路を通って戻る間、その経路(X−Yおよび深さ)を追跡する。検出装置は、最も適合度の高い線を算出するために十分な測定がきるよう、所定の距離を空けて位置する二つ以上の検出コイルから発信コイルまでの半径方向の距離を記録するように配置する。測定を行えば行うほど、線の適合度は高くなるのは明らかである。しかし、それらの測定結果を、コイルがカテーテルから引き出されるときの経路を示す視覚的表示に変換する技術は数多く存在する。電子および演算技術の当業者にとっては、そのような機能を提供するのは容易なことであろう。
【0107】
検出した信号の変化を使って、発信コイルが進んだ経路を判別することができる。そして、コイルの動作を検出し、表示処理する他の方法も数多く存在する。別の方法として、コイルの位置を、所定の変化があるたびに表示する方法がある。実際に必要とされる変化は、発信コイルを取り付けていたときの用途により、ユーザが調整できる。
【0108】
演算機能を有するプロセッサも、検出装置が受信した様々な信号を比較するための方法の一つであり、引用した米国特許の中に出願人によって開示されており、その場合も三つのコイルを特定の空間関係で配置している。
【0109】
プロセッサは、プロセッサが受信し、処理した信号に基づいて、表示のデータを作成する。さらにプロセッサは、装置のユーザに最も有効な形式で、発信コイルの位置を表す指示データを作成する。そのような形式の一つとして、インジケータの画像がある。図面では、検出されたコイルの位置および方向をユーザに矢印で示している。この特殊なインジケータの表示は、有効ではあるが、その他にも有効な表示が数多く存在する。
【0110】
また、プロセッサは、所定の基準画像を指定する基準データを作成することもできる。基準画像は、線、曲線、またはオブジェクトでもよい。好ましくは、基準画像は、人体の適当な部位または部分がよい。その部位または部分は、挿管されている患者の実際の部位または部分ではなく、架空の描写である。特に、非対象の人体(患者のものではない)でもよい。前述のように、異なるタイプのカテーテル位置決め装置は、互換性はなく、共通の検出装置を使用することができるように設計されている。しかし、異なる装置がある場合には、そのタイプをプロセッサに知らしめる必要はない。その二つは互いに対応して製造されているため、一つ以上の所定の基準画像を含むデータ記憶装置を利用することができる。よって、データ記憶装置を使って、検出装置のタイプと使用する場所に対して例えば胸骨に適した画像を提供することができる。また、データ記憶装置は、カテーテルとともに使用した発信コイル(指示データ)の位置に関する情報を表示装置に表示するのに有効な記号やその他の画像、および基準画像(適当な位置に配置した人体の部位もしくは部分の記号)などを保存することができる。
【0111】
図6に示す表示は、特殊な患者におけるトレースを示す典型的な結果である。他の患者は、わずかに異なる経路と深さを示すであろう。図示の深さの測定結果は、相対測定であり、絶対測定ではないが、適した方法で使用されている。患者の中にカテーテルを挿管する熟練した、経験を積んだスタッフの大きな助けとなっている。
【0112】
カテーテルの先端の相対的深さが個人による変化の率が非常に小さいため、そこに最も注意を払っている。
【0113】
経腸栄養カテーテル挿管の例において、図6に示す表示は、カテーテルが剣状胸骨結合部30の下を通過するときに非常に深い(例えば検出装置の位置より17cm下)ことを示している。カテーテルが胃の中を通過するとき、その先端は、より近く、より浅い(例えば14cm)のところを通過し、正中線32の下を通るときには非常に浅く患者の表面に最も近い(例えば8cm)。十二指腸のはじめの部分は比較的浅く(例えば10cm)、最終的には、十二指腸/空腸で非常に深くなる(例えば17cm)。
【0114】
長期間医療関係で使用した後、上記(または他の)箇所または領域で許容可能で確実な範囲の深さおよび率が開発され、カテーテルが通過する経路の正確性を医療的に評価するために最も役立つようになるであろう。
【0115】
この場合も、スチレットに取り付けたコイルの先端/遠位端、しかるにカテーテルの先端の正確な位置を証明するものではないが、表示された特性は、カテーテルの位置に関する医療上の決定を改善するために貢献する。
【0116】
スチレットは、カテーテル内で再使用することができる(汚染除去および洗浄後)。よって、医療上の環境で安価に利用でき、X線や他の検出法における費用と時間のかかる場合に比較して、より頻繁にカテーテルの位置をチェックするようになる。スチレットの再使用は、医療環境では一般的ではあるが、これらの装置の再利用を管理する作業標準のもとに既成当局の許可がないかぎりは、本書の著者は推奨しない。
【0117】
もちろん、他の医療監視技術も継続的に使用し、経腸/非経腸栄養であろうと、他の目的であろうと、カテーテルが適当な位置にあることを臨床医がさらに確信できるようにする必要がある。
【0118】
患者はX線、X線透視法、超音波診断法による画像ガイダンスによってVAC/CVCで挿管されることがしばしばである。経皮中心静脈アクセスは、カテーテルの先端が大静脈心房領域に位置しているときに行う。皮下トンネル形成カテーテルは皮膚の切開部分を介して体から出る前に皮下管を通る。このようなカテーテルは、薬剤投与および透析に使用する。画像ガイド技術は、高価であるが、盲目挿管もしくは、外部目印による挿管技術に比較して早期合併症の可能性が低い。
【0119】
VAC/CVCは、現在は、長期静脈内抗生物質投与ならびに非経腸栄養投与、および血液サンプリングなどに使用される。
【0120】
市場における多種多様なVAC/CVCからの選択肢には、ヒックマン(商標)またはグローション(商標)のような1ルーメン、もしくは多重ルーメン、短期間用の“セントラルライン”皮下トンネル形成カテーテル、Port−A−Cath(商標)またはInfusaPort(商標)のような埋め込み式カテーテルがあり、さらに、末梢静脈穿刺(PICC)も入手可能である。
【0121】
ここに説明した本発明は、ほとんどのカテーテルに対し正確な位置付けを促し、もっとも有利なことに、最初に載置してから後、いつでもその正確な載置をチェックおよび確認することができる。
【0122】
図7は、対応する左右の腕頭静脈50および52それぞれに中間で交わる右鎖骨下静脈46と左鎖骨下静脈48を示す胴体の上部の静脈系の正面図である。
【0123】
腕頭静脈は心臓62の右心房60に入る前に大静脈心房結合部56に向かって下降する上大静脈54の上側領域で結合する。
【0124】
図9は、臨床医が見える画面上に示されるものであり、先端が上大静脈54の中央領域に理想的に位置する末梢静脈穿刺(PICC)の経路として構成されたトレース64である。また、図9は、胸骨66の外側を示しており、よって、画面に表示されているものと、患者の体の周知の目印との間の基準領域を臨床医に提供する。明らかに輪郭は一般的な胸骨を絵画的に描写したものであり、患者の胸骨ではない。この描写は、いずれにしても、臨床医が手元で行う仕事に対して有用である。
【0125】
PICCの載置中、患者の横隔膜上の器官の相対的安定性により、モニタ上に示されたトレースは、経腸栄養カテーテルに関して説明した引き戻りトレースと類似している。カテーテルの先端は、上大静脈にモニタ上に表示された二次元の経路のみでなく、先に挿入したガイドワイヤ上で進んでいる間に患者の胴体の上部の静脈系のさまざまな枝部を通して進んだその深さによっても確認できる。
【0126】
モニタより臨床医が最も明確に得られる情報は、カテーテルが鎖骨下静脈から腕頭静脈(図9の68)の中に移る際のその方向の激しい変化と、それに関連する深さである。
【0127】
前述のように、大人の場合、カテーテルの先端と、適切に位置付けされた測定機器との間の直線距離が約9cmになったときが、カテーテルの先端の最も好ましいとされる位置として独立して識別された測定結果である。検出装置が患者の正中線に沿った頚静脈胸骨切り込みの先端/正中線に位置させた時がそうである。
【0128】
こうした明示的な測定は、例示のみを目的としたものであり、装置の使用に伴う実際的な方法論であるが、すべての環境において完全に正確なものではない。しかし、このような測定は、前述したように、将来、測定する患者の数が増え、他の方法により立証され、さらなるデータが収集されて分析されるに従って、カテーテルの先端の適切な位置のインジケータとして医療的に受け入れられないともかぎらない。
【0129】
表示装置は、カテーテルの先端の前進が連続的であり、この実施形態においては、モニタ表示の中の形状66で示すように患者の胸骨の位置に対して常に表示されているため、臨床医にとって特に有用である。
【0130】
図10は、胸腔の上部の静脈系の一部を示すものであり、特に上大静脈まで延在するPICC70の載置を示す。
【0131】
前述の内容から、表示された人体の部位または部分は、明示的にそれに対する信号発信コイルの位置を特定するために使用するものではないが、ガイドとして使用されることが多いことは明らかであろう。
【0132】
臨床医はその時間の経過に伴う観測から、信号検出器によって判定した挿入したコイルの位置は、表示された記号ではなく、信号検出装置上の所定の位置に対して半径方向にXcmであることが分かる。プロセッサは、コイル位置の水平面(仰向けに寝ている患者を想定)の例えばXとYの座標を、画面上の画像として、また数値として提供することができる。
【0133】
信号検出装置自体が所定の体の部位または部分に対して一貫した位置にある場合には、表示されたそれぞれの測定結果は表示された基準画像を参照する。しかし、これは、絶対値となるということではなく、例えば人体の特定の器官または通路における実際の位置として臨床医が経験し、評価するものは、習得した専門知識の問題である。
【0134】
したがって、表示は二つのレベルで使用される。一つは検出装置の所定の点から正確な半径方向の距離Xまたは(X,Y)を求めることである。もう一つは、その位置測定値をその周知の身体の部位または部分と関連付けることである。(表示されたものとは異なる場合もある。)
【0135】
表示された体の部位または部分は単なる描写に過ぎない。これは、領域を示すためにのみ使用する。
【0136】
円弧状の線(図3,4、および5)は、前述のように、典型的な人間の横隔膜の縦断面の複雑は形状を示す。検出装置および表示装置で使用する電子装置は、検出コイルの上側のコイルが特定の骨の目印上に載置されたと仮定するので、表示装置は、二本の曲線の接続部の位置決めをし、それに従ってカテーテルのコイルの位置の測定結果を関連付ける。
【0137】
よって、表示が単なる指標であると認識した上で、明らかに目に見えるものに加え、プロンプトを示すことができる。これらのプロンプトは、臨床医に、信号発信コイルが患者の横隔膜を示す円弧状の線の上か、下かを知らせる。これらのプロンプトは、可聴信号でもよい
【0138】
例えば、患者の頭の端部が検出装置の正しい載置によって正しく判断されていると仮定した場合、表示されたコイル位置が円弧状の線の上方から近くなるに従って可聴音の周波数が上がる。さらに、表示されたコイル位置が表示された円弧状の線の下に進み、そこから離れるに従って可聴音は、その距離の増加に伴いパルスがゆっくりとなる。
【0139】
可聴信号は装置のユーザが好むタイプのものでよい。
【0140】
また、測定位置を誤った載置の可能性を示すために使用することもできる。この場合、表示装置の中に専門のシステム情報データベースに相当するもののプログラムを組む必要がある。理想的には、身体上の信号検出装置の所定の位置に関し、信号検出器から一定の半径方向の距離だけ離れた体内の領域を指定し、挿管中に測定すると、信号発信コイルが身体の好ましくない領域または部位にある、もしくは近づいていることを示すようにする。
【0141】
よって、臨床医が期待した位置測定を自然に感じ取るだけでなく、専門的な装置を使って発信コイルが前進してカテーテルが患者の不適切な領域に入ったことを臨床医に警告するためのバックアップとして使用することができる。この場合の指示はモニタの画面上の可視表示装置によるものでも、また追加の可聴信号によるものでもよい。人体は解剖学的には患者によってさまざまであるため、上記の方法はあくまでもガイダンスであり、医療上の経験に代わるものではないことを認識しておく必要がある。
【0142】
体の他の部分へのカテーテルの載置に関し、医療上の経験を積むに従い、モニタ上に臨床医に役立つ解剖学上の定常点、領域または構造体などの様な他の基準画像を重ねることができるようになる。追加の可視および可聴情報は、患者の中にカテーテルを挿入する資格を有する熟練した臨床医または登録した看護婦へのガイダンスとなる。
【0143】
本発明は、上記の特定な適用方法における使用に限定されるものではないことは、当業者にとって明らかであろう。また、本発明はその好ましい実施形態において説明した特定の要素及び/又は特性に限定されるものでもない。本発明の原理から逸脱することなく、様々な変更が可能であることは明らかである。よって、本発明は、請求の範囲におけるそれらの変更すべてを含むものと理解されるべきものである。
【図面の簡単な説明】
【図1】コイルと、その先端/遠位端近傍に位置する出口孔を有するカテーテルを示す図である。
【図2】先端/遠位端の近傍に位置するコイルを有するスチレットを示す図である。
【図3】患者の上の適した位置に置かれた検出装置と、身体の領域を描写した表示の概要を示す図である。
【図4】患者の説明図上に重ねたカテーテルもしくはスチレットの先端のコイルの位置および深さの表示を示す図である。
【図5】希望の位置まで移動していなくても、時間の経過と共に患者の腹部に位置するコイルの位置のみをを示す典型的な表示の図である。
【図6】患者内において、カテーテルの記録された経路と現在の位置の表示状態を示す図である。
【図7】胴体の上部の静脈系を示す図である。
【図8】患者の頚静脈胸骨の切り込みの先端/正中線にわたって好ましい状態で位置決めされたコイル位置表示装置の概要を示す図である。
【図9】患者の上大静脈内に正しく載置された中心静脈カテーテル(CVC)を描写した図である。
【図10】患者の胴体の上部を表す図であり、CVCの経路と、その先端が上大静脈の領域に位置しているところを示す図である。
Claims (61)
- 対象患者の体に挿入されるカテーテルに関して使用する、信号エネルギーを発信するコイルの位置を表示する方法において、
a) 少なくとも二つの信号エネルギー検出器を有すると共に前記対象患者の体の所定の位置または部位に対して位置決めされたコイル位置測定手段を使用する工程と、
b) 前記コイル位置測定手段よる位置測定結果を表示する工程と含み、
前記位置測定結果は、前記位置測定手段に対して臨床医が前記対象患者の体の内部における、前記対象患者の体の所定の位置又は部位に対する前記コイルと前記カテーテルの位置を判定する為に使用することを特徴とする方法。 - 前記位置測定結果により、前記表示された位置測定結果に関連付けた、臨床医が前記対象患者の体における前記コイルと前記カテーテルの位置を判定する為に使用する非対象人体の箇所又は領域を示す更なる工程を含む請求項1に記載の方法。
- 前記位置測定手段は、前記人体の剣状胸骨結合部上又はその上方の所定の位置に関連付けて位置させ、消化管の中に挿入したカテーテルと共に使用することを特徴とする請求項2に記載の方法。
- 非対象人体の横隔膜を表す体の部位の領域又は描写が表示され、前記表示装置に人体の上下の胸腔が描写されることを特徴とする請求項3に記載の方法。
- 前記位置測定手段は、前記人体の頚静脈胸骨切り込みの先端/正中線上若しくは上方の所定の位置に関連付けて位置させ、心臓血管又は呼吸器系の中に挿入したカテーテルと共に使用することを特徴とする、請求項1に記載の方法。
- 人体の胸骨を表す前記非対象人体の部位の領域若しくは描写が表示され、よって前記表示装置に人体の骨格の上部が描写されていることを特徴とする請求項5に記載の方法。
- 前記コイルの位置測定結果を所定の時間間隔で表示する工程を更に含む請求項1に記載の方法。
- 前記コイルはカテーテルとともに使用するように構成されたスチレットまたはガイドワイヤに組み込まれていることを特徴とする請求項1に記載の方法。
- 前記スチレット又はガイドワイヤがカテーテルから引き戻されている間に前記コイルの位置を所定の時間間隔で表示して、前記コイル及び前記カテーテルの経路を追跡、表示する工程を含む請求項8に記載の方法。
- コイルがカテーテルに組み込まれており、人体内の前記カテーテルの位置を示す為に使用可能であることを特徴とする請求項1に記載の方法。
- カテーテルと共に使用可能であり、第1の端部と第2の端部を有する一対のワイヤと、
前記ワイヤの第1の端部と電子通信を行うプロセッサと、
前記ワイヤの第2の端部に接続してあり、前記対象患者の体の様々な箇所に位置せしめられる発信コイルと、
前記プロセッサと電子通信を行い、前記対象患者の体の所定の部分に関連して位置決めされるように構成された検出装置と、
少なくとも一つの所定の画像を表す少なくとも一つの基準画像を指定するプロセッサが検索した基準データと、
対象患者の体の中の発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定するプロセッサによって生成する指示データと、
前記指示画像と前記基準画像を表示する前記プロセッサと電子通信を行うモニタとを備えた、
ユーザが対象患者の体の中にカテーテルを載置する作業を補助するためのカテーテル位置表示装置。 - 前記発信コイルが電磁信号を発信することを特徴とする請求項11に記載のカテーテルロケータ。
- 前記一対のワイヤはスチレット又はガイドワイヤであるか、若しくはスチレット、ガイドワイヤ、又はカテーテルに組み込まれていることを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記検出装置は前記発信コイルから電磁信号を受信する少なくとも二つの受信コイルを備えてなることを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記プロセッサは、前記検出装置が前記対象患者の体の所定の部位に対して位置付けされた後に前記受信した電磁信号を表す前記検出装置から少なくとも一つの指示信号を受信することを特徴とする請求項14に記載のカテーテル位置表示装置。
- 対象患者の体の所定の部位が、カテーテルが心臓血管又は呼吸器系の中で使用された場合に頚静脈胸骨切り込みの先端/正中線であることを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記プロセッサは、前記発信コイルが前記対象患者の体の内部の前記カテーテル内に位置している間に前記検出装置から少なくとも一つの指示信号を受信することを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記カテーテルが前記胃腸管または前記消化管内で使用されている時には、前記対象患者の体の所定の部位は前記剣状胸骨結合部であることを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記発信コイルを前記カテーテルに使用し、前記カテーテルが前記対象患者の体の内部にある時に、前記表示装置がユーザに前記カテーテルの位置に関する情報を提供することを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記指示画像と前記基準画像は、ユーザに前記対象患者の体の内部の前記カテーテルの深さに関する情報を提供することを特徴とする請求項19に記載のカテーテル位置表示装置。
- 前記表示装置は、前記対象患者の体の内部のカテーテルのX−Y位置に関する情報をユーザに提供することを特徴とする請求項19に記載のカテーテル位置表示装置。
- 前記カテーテルの位置は、前記検出装置に対する位置であることを特徴とする請求項19に記載のカテーテル位置表示装置。
- 前記モニタが前記対象患者の体における前記カテーテルの移動方向に関する情報をユーザに提供することを特徴とする請求項19に記載のカテーテル位置表示装置。
- 前記移動方向に関する情報が前記指示データの変化から求められるものであることを特徴とする請求項23に記載のカテーテル位置表示装置。
- 前記プロセッサと電子通信を行うデータ記憶装置を含むことを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記データ記憶装置が非対象の人体の少なくとも一部の基準画像を指定するデータを含むことを特徴とする請求項25に記載のカテーテル位置表示装置。
- 前記非対象の人体が理論的人体であることを特徴とする請求項26に記載のカテーテル位置表示装置。
- 前記データ記憶装置が記号を含む基準画像を指定するデータを含むことを特徴とする請求項25に記載のカテーテル位置表示装置。
- 前記カテーテルを、前記対象患者の体の胃腸管で使用することを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記カテーテルを、前記対象患者の体の消化管で使用することを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記カテーテルを、前記対象患者の体の心臓血管系で使用することを特徴とする請求項11に記載のカテーテル位置表示装置。
- 前記カテーテルを、前記対象患者の体の呼吸器系で使用することを特徴とする請求項11に記載のカテーテル位置表示装置。
- (a)コイルと電子通信を行うプロセッサと、(b)信号を発信すると共にコイル位置決め装置、スチレット、ガイドワイヤ、または前記カテーテルに組み込まれ、対象患者の体内のさまざまな箇所に位置せしめられる発信コイルと、(c)前記プロセッサと電子通信を行う検出装置と、(d)前記対象患者の体の少なくとも一つの所定の部分を表す少なくとも一つの基準画像を指定するプロセサによって生成される基準データと、(e)前記対象患者の体における前記発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定する前記プロセッサが生成する指示データと、(f)前記指示画像と前記基準画像を表示するプロセッサと電子通信を行うモニタと、前記カテーテルは、スチレットまたはガイドワイヤを受容するように、もしくはコイルを組み込んで構成された、近位端と遠位端を有し、先端は遠位端に含まれるチューブを含むことを特徴とするカテーテル。
- 前記先端が、前記対象患者の体の胃腸管の中に挿入するように構成されたことを特徴とする請求項33に記載のカテーテル。
- 前記先端が、前記対象患者の体の血管の中に挿入するように構成されたことを特徴とする請求項33に記載のカテーテル。
- 前記カテーテルが、経腸栄養注入のために構成されていることを特徴とする請求項33に記載のカテーテル。
- 前記カテーテルが対象患者の体の消化管に挿入するように構成されていることを特徴とする請求項33に記載のカテーテル。
- 前記カテーテルが、前記対象患者の体の呼吸器系に挿入するように構成されていることを特徴とする請求項33に記載のカテーテル。
- 前記対象患者の体の所定の部分が前記対象患者の体の頚静脈胸骨切り込みの先端/正中部であることを特徴とする請求項35および38に記載のカテーテル。
- 前記対象患者の体の所定の部分が前記対象患者の体の剣状胸骨結合部であることを特徴とする請求項36及び37に記載のカテーテル。
- カテーテル内に挿入可能であり、近位端と遠位端を有するマルチストランドワイヤと、
前記ワイヤの二本のストランドの遠位単に接続した発信コイルと、
少なくとも二個の受信コイルと、
モニタと、
前記ワイヤ、前記受信コイル、および前記モニタと電子通信するプロセッサとを備え、
プロセッサは少なくとも一つの基準信号を、コイルが対象患者の少なくとも一つの所定の骨の目印に対して位置決めされた後に少なくとも二つの受信コイルから受信するとともに基準データを検索し、
モニタを駆動して基準データを図で表示し、
発信コイルを前記対象患者の体に挿入した後に前記発信コイルから信号を受信する少なくとも二つの受信コイルから少なくとも一つの指示信号を受信し、
指示データを生成し、
モニタを駆動して、指示データを図で表示することを特徴とするカテーテル位置表示装置。 - 前記所定の骨の目印が、前記対象患者の体の頚静脈胸骨切り込みの先端/正中部であることを特徴とする請求項41に記載のカテーテル位置表示装置。
- 前記所定の骨の目印が、前記対象患者の体の剣状胸骨結合部であることを特徴とする請求項41に記載のカテーテル位置表示装置。
- 前記モニタが、前記基準データと前記指示データを同時に示すことを特徴とする請求項41に記載のカテーテル位置表示装置。
- 前記モニタの図による表示がユーザに、前記カテーテルを対象患者の体に適切に載置するために有用な情報を提供することを特徴とする請求項41に記載のカテーテル位置表示装置。
- 前記プロセッサと電子通信を行うデータ記憶装置を備えてなることを特徴とする請求項41に記載のカテーテル位置表示装置。
- 前記データ記憶装置が、非対象の人体の少なくとも一部を表すデータを記憶することを特徴とする請求項41に記載のカテーテル位置表示装置。
- 前記プロセッサは非対象の人体の一部を図で表示するためにモニタを駆動することを特徴とする請求項47に記載のカテーテル位置表示装置。
- (a)対象患者の体の所定の目印に対して位置付けされた、少なくとも一つの受信コイルの位置を示す少なくとも一つの基準信号を受信する工程と、
(b)前記対象患者の体に挿入した発信コイルから少なくとも一つの指示信号を受信する工程と、
(c)前記所定の目印に伴う基準データを検索する工程と、
(d)前記基準データから引き出した基準画像を表示する工程と、
(e)前記対象患者の体上または上方の少なくとも二つの受信コイルの位置の相対位置を示す指示信号によって表されるデータを生成する工程と、
(f)前記指示データが表す図を表示する工程と、
(g)前記指示信号の変化を受信した後、工程(e)と(f)を繰り返す工程とから成る、カテーテルを対象患者の体に適切に載置しやすくするための方法。 - 非対象の人体の少なくとも一部を表す基準データを検索する工程を含む請求項49に記載の方法。
- 前記基準データを表す図を表示する工程を含む請求項50に記載の方法。
- 前記対象患者の体の頚動脈胸骨切り込みの先端/正中部である少なくとも一つの基準となる目印に伴う基準データを検索する工程を含む請求項49に記載の方法。
- 前記対象患者の体の剣状胸骨結合部である少なくとも一つの基準となる目印に伴う基準データを検索する工程を含む請求項49に記載の方法。
- (a)検出装置の所定の領域を対象患者の体の所定の目印上に載置する工程と、
(b)カテーテル、スチレット、ガイドワイヤまたは発信コイルを埋め込んだコイル位置表示装置を前記対象患者の体に挿入する工程と、
(c)所定の部位または部分の図形表示、もしくは、基準画像の表示をモニタ上で見る工程と、
(d)モニタ上で前記発信コイルの図形表示を見る工程と、
(e)図形表示の相対位置の表示を利用して、前記対象患者の体の中で前記カテーテルを操縦する工程と、を備えてなるカテーテル位置表示装置を操作する方法。 - 前記検出装置の所定の領域を前記対象患者の体の頚静脈胸骨切り込みの先端/正中部上に前記検出装置の縦の前記中央線が前記対象患者の体の正中線に合うように載置する工程を含む、請求項54に記載の方法。
- 前記対象患者の体の剣状胸骨結合部上に前記検出装置の所定の領域を載置する工程を含む、請求項55に記載の方法。
- (a)ワイヤの束の近位の端部の所定の部分と電子通信を行うプロセッサと、(b)ワイヤの束の遠位の端部の所定の部分と接続され、対象患者の体内で様々な箇所に位置せしめられる発信コイルと、(c)前記プロセッサと電子通信を行い、前記対象患者の体の所定の部分に関連付けて位置決めされるように構成された検出装置と、(d)少なくとも一つの所定の画像を表す少なくとも一つの基準画像を指定する前記プロセッサによって検索された基準データと、(e)対象患者の体における発信コイルの少なくとも一つの位置に関する情報を提供する少なくとも一つの指示画像を指定する前記プロセッサによって生成される指示データと、(f)前記指示画像と基準画像を表示するプロセッサと電子通信を行うモニタを備え、前記ワイヤの束は、
可撓性チューブの位置決めを制御するように構成された所定の堅さを有する第1のワイヤと、
前記発信コイルと前記プロセッサとの間で信号を伝送するように構成された第2のワイヤと、
第2のワイヤを第1のワイヤに固定するための手段とを備えていることを特徴とするカテーテル位置表示装置と共に使用するワイヤの束。 - 前記束ねる手段が第2のワイヤを第1のワイヤの周囲に巻回することであることを特徴とする請求項57に記載のワイヤの束。
- 前記束ねる手段が材料のラッピングを含むことを特徴とする請求項57に記載のワイヤの束。
- 前記束ねる手段が接着剤を含むことを特徴とする請求項57に記載のワイヤの束。
- 前記束ねる手段が所定の覆い留め金具を含むことを特徴とする請求項57に記載のワイヤの束。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AUPQ9592A AUPQ959200A0 (en) | 2000-08-23 | 2000-08-23 | Catheter locator apparatus and method of use |
| AUPR5250A AUPR525001A0 (en) | 2001-05-24 | 2001-05-24 | Catheter locator apparatus and method of use |
| PCT/AU2001/001051 WO2002015973A1 (en) | 2000-08-23 | 2001-08-23 | Catheter locator apparatus and method of use |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010212975A Division JP5380410B2 (ja) | 2000-08-23 | 2010-09-24 | カテーテル位置表示装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004505748A true JP2004505748A (ja) | 2004-02-26 |
Family
ID=25646417
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002520893A Pending JP2004505748A (ja) | 2000-08-23 | 2001-08-23 | カテーテル位置表示装置およびその使用法 |
| JP2010212975A Expired - Lifetime JP5380410B2 (ja) | 2000-08-23 | 2010-09-24 | カテーテル位置表示装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010212975A Expired - Lifetime JP5380410B2 (ja) | 2000-08-23 | 2010-09-24 | カテーテル位置表示装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (7) | US20040087877A1 (ja) |
| EP (3) | EP2258335A1 (ja) |
| JP (2) | JP2004505748A (ja) |
| AU (3) | AU8370301A (ja) |
| CA (1) | CA2420676C (ja) |
| WO (1) | WO2002015973A1 (ja) |
Cited By (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7794407B2 (en) | 2006-10-23 | 2010-09-14 | Bard Access Systems, Inc. | Method of locating the tip of a central venous catheter |
| US8388541B2 (en) | 2007-11-26 | 2013-03-05 | C. R. Bard, Inc. | Integrated system for intravascular placement of a catheter |
| US8388546B2 (en) | 2006-10-23 | 2013-03-05 | Bard Access Systems, Inc. | Method of locating the tip of a central venous catheter |
| US8478382B2 (en) | 2008-02-11 | 2013-07-02 | C. R. Bard, Inc. | Systems and methods for positioning a catheter |
| US8849382B2 (en) | 2007-11-26 | 2014-09-30 | C. R. Bard, Inc. | Apparatus and display methods relating to intravascular placement of a catheter |
| US9636031B2 (en) | 2007-11-26 | 2017-05-02 | C.R. Bard, Inc. | Stylets for use with apparatus for intravascular placement of a catheter |
| US9649048B2 (en) | 2007-11-26 | 2017-05-16 | C. R. Bard, Inc. | Systems and methods for breaching a sterile field for intravascular placement of a catheter |
| US9839372B2 (en) | 2014-02-06 | 2017-12-12 | C. R. Bard, Inc. | Systems and methods for guidance and placement of an intravascular device |
| US9901714B2 (en) | 2008-08-22 | 2018-02-27 | C. R. Bard, Inc. | Catheter assembly including ECG sensor and magnetic assemblies |
| US9907513B2 (en) | 2008-10-07 | 2018-03-06 | Bard Access Systems, Inc. | Percutaneous magnetic gastrostomy |
| US10004875B2 (en) | 2005-08-24 | 2018-06-26 | C. R. Bard, Inc. | Stylet apparatuses and methods of manufacture |
| US10046139B2 (en) | 2010-08-20 | 2018-08-14 | C. R. Bard, Inc. | Reconfirmation of ECG-assisted catheter tip placement |
| US10105121B2 (en) | 2007-11-26 | 2018-10-23 | C. R. Bard, Inc. | System for placement of a catheter including a signal-generating stylet |
| US10231753B2 (en) | 2007-11-26 | 2019-03-19 | C. R. Bard, Inc. | Insertion guidance system for needles and medical components |
| US10231643B2 (en) | 2009-06-12 | 2019-03-19 | Bard Access Systems, Inc. | Apparatus and method for catheter navigation and tip location |
| US10238418B2 (en) | 2007-11-26 | 2019-03-26 | C. R. Bard, Inc. | Apparatus for use with needle insertion guidance system |
| US10271762B2 (en) | 2009-06-12 | 2019-04-30 | Bard Access Systems, Inc. | Apparatus and method for catheter navigation using endovascular energy mapping |
| US10349890B2 (en) | 2015-06-26 | 2019-07-16 | C. R. Bard, Inc. | Connector interface for ECG-based catheter positioning system |
| US10449330B2 (en) | 2007-11-26 | 2019-10-22 | C. R. Bard, Inc. | Magnetic element-equipped needle assemblies |
| US10524691B2 (en) | 2007-11-26 | 2020-01-07 | C. R. Bard, Inc. | Needle assembly including an aligned magnetic element |
| US10602958B2 (en) | 2007-11-26 | 2020-03-31 | C. R. Bard, Inc. | Systems and methods for guiding a medical instrument |
| US10639008B2 (en) | 2009-10-08 | 2020-05-05 | C. R. Bard, Inc. | Support and cover structures for an ultrasound probe head |
| US10751509B2 (en) | 2007-11-26 | 2020-08-25 | C. R. Bard, Inc. | Iconic representations for guidance of an indwelling medical device |
| US10820885B2 (en) | 2012-06-15 | 2020-11-03 | C. R. Bard, Inc. | Apparatus and methods for detection of a removable cap on an ultrasound probe |
| US10973584B2 (en) | 2015-01-19 | 2021-04-13 | Bard Access Systems, Inc. | Device and method for vascular access |
| US10992079B2 (en) | 2018-10-16 | 2021-04-27 | Bard Access Systems, Inc. | Safety-equipped connection systems and methods thereof for establishing electrical connections |
| US11000207B2 (en) | 2016-01-29 | 2021-05-11 | C. R. Bard, Inc. | Multiple coil system for tracking a medical device |
| US11103213B2 (en) | 2009-10-08 | 2021-08-31 | C. R. Bard, Inc. | Spacers for use with an ultrasound probe |
| JP2022515959A (ja) * | 2018-10-30 | 2022-02-24 | コリンダス、インコーポレイテッド | 経路を通し目標位置へデバイスを案内するシステム及び方法 |
Families Citing this family (96)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8177762B2 (en) | 1998-12-07 | 2012-05-15 | C. R. Bard, Inc. | Septum including at least one identifiable feature, access ports including same, and related methods |
| EP2258335A1 (en) | 2000-08-23 | 2010-12-08 | Micronix Pty Ltd | Catheter locator apparatus and method of use |
| US20090165784A1 (en) * | 2007-12-28 | 2009-07-02 | Tyco Healthcare Group Lp | Lubricious intubation device |
| US20060116658A1 (en) * | 2004-11-30 | 2006-06-01 | Kimberly-Clark Worldwide, Inc. | Multi-lumen stoma measuring device and method for using same |
| US20060116637A1 (en) * | 2004-11-30 | 2006-06-01 | Kimberly-Clark Worldwide, Inc. | Tract measuring device having a unitary occluded tip and inflatable sock member and method of making the same |
| US7976518B2 (en) | 2005-01-13 | 2011-07-12 | Corpak Medsystems, Inc. | Tubing assembly and signal generator placement control device and method for use with catheter guidance systems |
| WO2006074510A1 (en) * | 2005-01-14 | 2006-07-20 | Micronix Pty Ltd | Guiding insert assembly for a catheter used with a catheter position guidance system |
| US8029482B2 (en) | 2005-03-04 | 2011-10-04 | C. R. Bard, Inc. | Systems and methods for radiographically identifying an access port |
| WO2006096686A1 (en) | 2005-03-04 | 2006-09-14 | C.R. Bard, Inc. | Access port identification systems and methods |
| US9474888B2 (en) | 2005-03-04 | 2016-10-25 | C. R. Bard, Inc. | Implantable access port including a sandwiched radiopaque insert |
| US7947022B2 (en) | 2005-03-04 | 2011-05-24 | C. R. Bard, Inc. | Access port identification systems and methods |
| WO2006116613A1 (en) | 2005-04-27 | 2006-11-02 | C.R. Bard, Inc. | Infusion apparatuses |
| US10307581B2 (en) | 2005-04-27 | 2019-06-04 | C. R. Bard, Inc. | Reinforced septum for an implantable medical device |
| EP3173121B8 (en) | 2005-04-27 | 2021-03-24 | C.R. Bard Inc. | Infusion apparatuses provided with septum |
| US20070066881A1 (en) | 2005-09-13 | 2007-03-22 | Edwards Jerome R | Apparatus and method for image guided accuracy verification |
| EP1924198B1 (en) | 2005-09-13 | 2019-04-03 | Veran Medical Technologies, Inc. | Apparatus for image guided accuracy verification |
| US8197494B2 (en) | 2006-09-08 | 2012-06-12 | Corpak Medsystems, Inc. | Medical device position guidance system with wireless connectivity between a noninvasive device and an invasive device |
| US9265912B2 (en) | 2006-11-08 | 2016-02-23 | C. R. Bard, Inc. | Indicia informative of characteristics of insertable medical devices |
| US9642986B2 (en) * | 2006-11-08 | 2017-05-09 | C. R. Bard, Inc. | Resource information key for an insertable medical device |
| US9579496B2 (en) | 2007-11-07 | 2017-02-28 | C. R. Bard, Inc. | Radiopaque and septum-based indicators for a multi-lumen implantable port |
| US7998498B2 (en) | 2008-01-22 | 2011-08-16 | Michael Szycher | Antimicrobial material and method for making the same |
| US8367094B2 (en) | 2008-01-22 | 2013-02-05 | Michael Szycher | Antimicrobial material and method for making the same |
| EP2169576A1 (de) * | 2008-09-29 | 2010-03-31 | BrainLAB AG | Verfahren zum Aktualisieren eines Zustands eines medizinisch verwendbaren Objekts |
| WO2010059375A2 (en) * | 2008-10-30 | 2010-05-27 | Payner Troy D | Systems and methods for guiding a medical instrument |
| CN102271737B (zh) | 2008-10-31 | 2016-02-17 | C·R·巴德股份有限公司 | 用于提供对患者皮下进入的进入端口 |
| US8932271B2 (en) | 2008-11-13 | 2015-01-13 | C. R. Bard, Inc. | Implantable medical devices including septum-based indicators |
| US11890443B2 (en) | 2008-11-13 | 2024-02-06 | C. R. Bard, Inc. | Implantable medical devices including septum-based indicators |
| US9445734B2 (en) | 2009-06-12 | 2016-09-20 | Bard Access Systems, Inc. | Devices and methods for endovascular electrography |
| KR101773207B1 (ko) | 2009-06-12 | 2017-08-31 | 바드 액세스 시스템즈, 인크. | 카테터 팁 배치 방법 |
| CN105288836B (zh) | 2009-11-17 | 2018-09-25 | C·R·巴德股份有限公司 | 包括锚定装置和标识部分的包覆模制的进入端口 |
| US8882673B2 (en) * | 2010-02-12 | 2014-11-11 | I-Flow Corporation | Continuous transversus abdominis plane block |
| US20130303887A1 (en) | 2010-08-20 | 2013-11-14 | Veran Medical Technologies, Inc. | Apparatus and method for four dimensional soft tissue navigation |
| EP2613687B1 (en) | 2010-09-08 | 2016-11-02 | Covidien LP | Catheter with imaging assembly |
| US8965482B2 (en) | 2010-09-30 | 2015-02-24 | Nevro Corporation | Systems and methods for positioning implanted devices in a patient |
| US8805519B2 (en) | 2010-09-30 | 2014-08-12 | Nevro Corporation | Systems and methods for detecting intrathecal penetration |
| US8801693B2 (en) | 2010-10-29 | 2014-08-12 | C. R. Bard, Inc. | Bioimpedance-assisted placement of a medical device |
| US8971993B2 (en) * | 2010-11-19 | 2015-03-03 | Mediguide Ltd. | Systems and methods for navigating a surgical device |
| USD676955S1 (en) | 2010-12-30 | 2013-02-26 | C. R. Bard, Inc. | Implantable access port |
| USD682416S1 (en) | 2010-12-30 | 2013-05-14 | C. R. Bard, Inc. | Implantable access port |
| US9265897B2 (en) | 2011-01-26 | 2016-02-23 | Avent, Inc. | Method and corresponding kit for administering a paravertebral block |
| US8768019B2 (en) * | 2011-02-03 | 2014-07-01 | Medtronic, Inc. | Display of an acquired cine loop for procedure navigation |
| US8473034B2 (en) * | 2011-03-04 | 2013-06-25 | Cook Medical Technologies Llc | System and method for feeding tube placement |
| EP2729073A4 (en) | 2011-07-06 | 2015-03-11 | Bard Inc C R | Needle length determination and calibration for a deployment control system |
| CN103717135B (zh) * | 2011-07-22 | 2016-02-03 | 株式会社东芝 | X射线诊断装置 |
| USD724745S1 (en) | 2011-08-09 | 2015-03-17 | C. R. Bard, Inc. | Cap for an ultrasound probe |
| USD699359S1 (en) | 2011-08-09 | 2014-02-11 | C. R. Bard, Inc. | Ultrasound probe head |
| WO2013036772A1 (en) * | 2011-09-08 | 2013-03-14 | Corpak Medsystems, Inc. | Apparatus and method used with guidance system for feeding and suctioning |
| EP2763743A4 (en) | 2011-10-04 | 2015-08-05 | Nevro Corp | MODELING POSITIONS OF DEVICES IMPLEMENTED IN A PATIENT |
| WO2013070775A1 (en) | 2011-11-07 | 2013-05-16 | C.R. Bard, Inc | Ruggedized ultrasound hydrogel insert |
| US20130131500A1 (en) * | 2011-11-18 | 2013-05-23 | Covidien Lp | In-situ proximity recognition apparatus |
| KR101284722B1 (ko) | 2012-01-18 | 2013-07-17 | 강원대학교산학협력단 | 약물 주입장치 |
| EP4056111A3 (en) | 2012-02-22 | 2022-12-07 | Veran Medical Technologies, Inc. | Systems, methods, and devices for four dimensional soft tissue navigation |
| US8676331B2 (en) | 2012-04-02 | 2014-03-18 | Nevro Corporation | Devices for controlling spinal cord modulation for inhibiting pain, and associated systems and methods, including controllers for automated parameter selection |
| US9517184B2 (en) | 2012-09-07 | 2016-12-13 | Covidien Lp | Feeding tube with insufflation device and related methods therefor |
| USD717340S1 (en) | 2012-09-07 | 2014-11-11 | Covidien Lp | Display screen with enteral feeding icon |
| USD735343S1 (en) | 2012-09-07 | 2015-07-28 | Covidien Lp | Console |
| USD716841S1 (en) | 2012-09-07 | 2014-11-04 | Covidien Lp | Display screen with annotate file icon |
| US9198835B2 (en) | 2012-09-07 | 2015-12-01 | Covidien Lp | Catheter with imaging assembly with placement aid and related methods therefor |
| US9308022B2 (en) | 2012-12-10 | 2016-04-12 | Nevro Corporation | Lead insertion devices and associated systems and methods |
| WO2014138652A1 (en) * | 2013-03-08 | 2014-09-12 | C.R. Bard, Inc. | Iconic representations relating to systems for placing a medical device |
| US9265935B2 (en) | 2013-06-28 | 2016-02-23 | Nevro Corporation | Neurological stimulation lead anchors and associated systems and methods |
| US20150305612A1 (en) | 2014-04-23 | 2015-10-29 | Mark Hunter | Apparatuses and methods for registering a real-time image feed from an imaging device to a steerable catheter |
| US20150305650A1 (en) | 2014-04-23 | 2015-10-29 | Mark Hunter | Apparatuses and methods for endobronchial navigation to and confirmation of the location of a target tissue and percutaneous interception of the target tissue |
| US9399117B2 (en) | 2014-11-13 | 2016-07-26 | George Hsu | Systems and methods for providing securement and position verification for medical catheters |
| US20220183584A1 (en) * | 2015-02-20 | 2022-06-16 | Teleflex Life Sciences Limited | Medical device position location systems, devices and methods |
| US9789321B2 (en) | 2015-04-03 | 2017-10-17 | Nevro Corp. | Couplings for implanted leads and external stimulators, and associated systems and methods |
| US20160354158A1 (en) * | 2015-06-05 | 2016-12-08 | Pacesetter, Inc. | Methods and systems for virtual venous imaging |
| JP2018527034A (ja) | 2015-07-06 | 2018-09-20 | ワード, エルエルシーWerd, Llc | テンポラリーチューブおよび該チューブを患者内に留置するためのシステム |
| US11259877B2 (en) | 2015-10-02 | 2022-03-01 | Koninklijke Philips N.V. | Electromagnetic navigation device for guiding and tracking an interventional tool |
| WO2017127722A1 (en) | 2016-01-20 | 2017-07-27 | Lucent Medical Systems, Inc. | Low-frequency electromagnetic tracking |
| US11389254B2 (en) | 2016-08-18 | 2022-07-19 | Envizion Medical Ltd. | Insertion device positioning guidance system and method |
| IL254009A0 (en) * | 2016-08-18 | 2017-09-28 | Nutriseal Lp | A system and method for directing the location of a device inserted into the body |
| AU2018231031B2 (en) | 2017-03-09 | 2023-11-02 | Nevro Corp. | Paddle leads and delivery tools, and associated systems and methods |
| US11839728B2 (en) * | 2017-04-24 | 2023-12-12 | The General Hospital Corporation | Transnasal catheter for imaging and biopsying internal luminal organs |
| CN107049501B (zh) * | 2017-06-13 | 2023-04-28 | 魏燕 | 泌尿系统腔内仿生碎石机器人 |
| US10293141B2 (en) | 2017-07-03 | 2019-05-21 | George Hsu | Device with open cutout design for securement and position verification of medical catheters |
| US11027096B2 (en) | 2017-08-21 | 2021-06-08 | Lucent Medical Systems, Inc. | Flexible circuit bearing a trackable low-frequency electromagnetic coil |
| DE102017008148A1 (de) * | 2017-08-29 | 2019-02-28 | Joimax Gmbh | Sensoreinheit, intraoperatives Navigationssystem und Verfahren zur Detektion eines chirurgischen Instruments |
| US11000206B2 (en) | 2017-10-26 | 2021-05-11 | Biosense Webster (Israel) Ltd. | Esophageal probe with transmitting coils |
| KR102035711B1 (ko) * | 2017-11-02 | 2019-10-23 | 재단법인 아산사회복지재단 | 깊이 측정이 가능한 기관내삽관 튜브 |
| US11234769B2 (en) | 2018-03-02 | 2022-02-01 | Lucent Medical Systems, Inc. | Wireless electromagnetic navigational element |
| US11426133B2 (en) | 2018-03-13 | 2022-08-30 | Lucent Medical Systems, Inc. | Externally placed electromagnetic fiducial element |
| AU2019242906A1 (en) | 2018-03-29 | 2020-10-15 | Nevro Corp. | Leads having sidewall openings, and associated systems and methods |
| US11495141B2 (en) | 2018-03-29 | 2022-11-08 | Cae Healthcare Canada Inc. | Dual channel medical simulator |
| WO2019198061A1 (en) | 2018-04-13 | 2019-10-17 | Universidade Do Minho | Guidance system, method and devices thereof |
| US10548815B2 (en) | 2018-04-30 | 2020-02-04 | Envizion Medical Ltd. | Insertion device positioning guidance system and method |
| WO2019240032A1 (ja) * | 2018-06-11 | 2019-12-19 | テルモ株式会社 | 診断方法および診断システム並びに診断システムの制御方法 |
| US11382701B2 (en) | 2018-10-17 | 2022-07-12 | Envizion Medical Ltd. | Insertion device positioning guidance system and method |
| JP7085093B2 (ja) | 2018-10-17 | 2022-06-16 | エンヴィジョン メディカル リミテッド | 挿入装置位置決め案内システム及び方法 |
| US11590320B2 (en) | 2019-04-04 | 2023-02-28 | Avent, Inc. | Two-in-one catheter and signal generating apparatus |
| CN110575254A (zh) * | 2019-10-19 | 2019-12-17 | 树兰(杭州)医院有限公司 | 基于电磁技术的输液港导管头端定位装置及其使用方法 |
| CN110859674B (zh) * | 2019-11-26 | 2020-11-20 | 北京唯迈医疗设备有限公司 | 一种介入手术机器人主端控制装置 |
| DE102020212086A1 (de) * | 2020-09-25 | 2022-03-31 | Siemens Healthcare Gmbh | Ermitteln der Qualität einer Positionierung eines in einen Patientenkörper eingeführten Objekts |
| CN112386333B (zh) * | 2020-11-03 | 2022-04-19 | 浙江赛弘众智网络科技有限公司 | 一种肺部氩氦刀手术路径数据的生成方法及系统 |
| US20230145909A1 (en) | 2021-11-05 | 2023-05-11 | Avent, Inc. | Configurable System and Method for Indicating Deviation from a Medical Device Placement Pathway |
| US20230381456A1 (en) * | 2022-05-27 | 2023-11-30 | Inmed, Inc. | Catheter exchange strategy and catheter configured for same |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05177000A (ja) * | 1991-12-30 | 1993-07-20 | Shimadzu Corp | カテーテルガイド装置 |
| JPH07111969A (ja) * | 1993-10-18 | 1995-05-02 | Olympus Optical Co Ltd | 内視鏡挿入状態検出装置 |
| JPH08542A (ja) * | 1994-04-21 | 1996-01-09 | Olympus Optical Co Ltd | 内視鏡位置検出装置 |
| JPH0984745A (ja) * | 1995-07-17 | 1997-03-31 | Olympus Optical Co Ltd | 内視鏡形状検出装置 |
| JPH11226129A (ja) * | 1997-11-15 | 1999-08-24 | Roke Manor Res Ltd | カテーテル追跡システム |
Family Cites Families (155)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4173228A (en) | 1977-05-16 | 1979-11-06 | Applied Medical Devices | Catheter locating device |
| US4317078A (en) * | 1979-10-15 | 1982-02-23 | Ohio State University Research Foundation | Remote position and orientation detection employing magnetic flux linkage |
| US4572198A (en) * | 1984-06-18 | 1986-02-25 | Varian Associates, Inc. | Catheter for use with NMR imaging systems |
| US4672972A (en) * | 1984-08-13 | 1987-06-16 | Berke Howard R | Solid state NMR probe |
| US5045071A (en) * | 1985-12-17 | 1991-09-03 | Mbo Laboratories, Inc. | Double wall catheter with internal printing and embedded marker |
| US5352795A (en) * | 1986-03-07 | 1994-10-04 | Ciba-Geigy Corporation | Alpha-heterocycle substituted tolunitriles |
| US4836214A (en) | 1986-12-01 | 1989-06-06 | Bomed Medical Manufacturing, Ltd. | Esophageal electrode array for electrical bioimpedance measurement |
| US4921481A (en) | 1988-03-23 | 1990-05-01 | Abbott Laboratories | Enteral feeding system utilizing gastrointestinal myoelectrography |
| US5456251A (en) | 1988-08-26 | 1995-10-10 | Mountpelier Investments, S.A. | Remote sensing tonometric catheter apparatus and method |
| US4905698A (en) | 1988-09-13 | 1990-03-06 | Pharmacia Deltec Inc. | Method and apparatus for catheter location determination |
| AU642647B2 (en) | 1989-05-24 | 1993-10-28 | Micronix Pty Ltd | Medical instrument location means |
| CN1049287A (zh) * | 1989-05-24 | 1991-02-20 | 住友电气工业株式会社 | 治疗导管 |
| US5681260A (en) * | 1989-09-22 | 1997-10-28 | Olympus Optical Co., Ltd. | Guiding apparatus for guiding an insertable body within an inspected object |
| EP0419729A1 (de) * | 1989-09-29 | 1991-04-03 | Siemens Aktiengesellschaft | Ortung eines Katheters mittels nichtionisierender Felder |
| US5005592A (en) * | 1989-10-27 | 1991-04-09 | Becton Dickinson And Company | Method and apparatus for tracking catheters |
| JP2750201B2 (ja) | 1990-04-13 | 1998-05-13 | オリンパス光学工業株式会社 | 内視鏡の挿入状態検出装置 |
| US5253647A (en) * | 1990-04-13 | 1993-10-19 | Olympus Optical Co., Ltd. | Insertion position and orientation state pickup for endoscope |
| GB9018660D0 (en) * | 1990-08-24 | 1990-10-10 | Imperial College | Probe system |
| US5257636A (en) | 1991-04-02 | 1993-11-02 | Steven J. White | Apparatus for determining position of an endothracheal tube |
| GB2254253A (en) | 1991-04-05 | 1992-10-07 | Deborah Jill Colson | A combined naso-gastric feeding tube and electrode |
| US5395366A (en) * | 1991-05-30 | 1995-03-07 | The State University Of New York | Sampling capsule and process |
| US5279607A (en) * | 1991-05-30 | 1994-01-18 | The State University Of New York | Telemetry capsule and process |
| CA2073266A1 (en) | 1991-07-09 | 1993-01-10 | Mehmet Rona | Distal targeting system |
| US5265610A (en) | 1991-09-03 | 1993-11-30 | General Electric Company | Multi-planar X-ray fluoroscopy system using radiofrequency fields |
| US5255680A (en) | 1991-09-03 | 1993-10-26 | General Electric Company | Automatic gantry positioning for imaging systems |
| EP0531081A1 (en) * | 1991-09-03 | 1993-03-10 | General Electric Company | Tracking system to follow the position and orientation of a device with radiofrequency fields |
| US5251635A (en) * | 1991-09-03 | 1993-10-12 | General Electric Company | Stereoscopic X-ray fluoroscopy system using radiofrequency fields |
| US5211165A (en) * | 1991-09-03 | 1993-05-18 | General Electric Company | Tracking system to follow the position and orientation of a device with radiofrequency field gradients |
| US5645065A (en) | 1991-09-04 | 1997-07-08 | Navion Biomedical Corporation | Catheter depth, position and orientation location system |
| US5425367A (en) * | 1991-09-04 | 1995-06-20 | Navion Biomedical Corporation | Catheter depth, position and orientation location system |
| US5443065A (en) * | 1991-09-24 | 1995-08-22 | Angeion Corporation | Connector for medical device |
| US5445150A (en) * | 1991-11-18 | 1995-08-29 | General Electric Company | Invasive system employing a radiofrequency tracking system |
| US5437277A (en) * | 1991-11-18 | 1995-08-01 | General Electric Company | Inductively coupled RF tracking system for use in invasive imaging of a living body |
| DE69228680D1 (de) * | 1991-12-23 | 1999-04-22 | Sims Deltec Inc | Führungsdrahtvorrichtung mit ortungsglied |
| US5325873A (en) * | 1992-07-23 | 1994-07-05 | Abbott Laboratories | Tube placement verifier system |
| CA2142338C (en) * | 1992-08-14 | 1999-11-30 | John Stuart Bladen | Position location system |
| US5375596A (en) | 1992-09-29 | 1994-12-27 | Hdc Corporation | Method and apparatus for determining the position of catheters, tubes, placement guidewires and implantable ports within biological tissue |
| US5353807A (en) | 1992-12-07 | 1994-10-11 | Demarco Thomas J | Magnetically guidable intubation device |
| US5353795A (en) * | 1992-12-10 | 1994-10-11 | General Electric Company | Tracking system to monitor the position of a device using multiplexed magnetic resonance detection |
| DE4310993A1 (de) * | 1993-04-03 | 1994-10-06 | Philips Patentverwaltung | MR-Abbildungsverfahren und Anordnung zur Durchführung des Verfahrens |
| US5391199A (en) | 1993-07-20 | 1995-02-21 | Biosense, Inc. | Apparatus and method for treating cardiac arrhythmias |
| US5738096A (en) * | 1993-07-20 | 1998-04-14 | Biosense, Inc. | Cardiac electromechanics |
| US5902238A (en) * | 1993-09-14 | 1999-05-11 | University Of Washington | Medical tube and apparatus for locating the same in the body of a patient |
| US5425382A (en) * | 1993-09-14 | 1995-06-20 | University Of Washington | Apparatus and method for locating a medical tube in the body of a patient |
| US5558091A (en) | 1993-10-06 | 1996-09-24 | Biosense, Inc. | Magnetic determination of position and orientation |
| US5991650A (en) | 1993-10-15 | 1999-11-23 | Ep Technologies, Inc. | Surface coatings for catheters, direct contacting diagnostic and therapeutic devices |
| US6059718A (en) * | 1993-10-18 | 2000-05-09 | Olympus Optical Co., Ltd. | Endoscope form detecting apparatus in which coil is fixedly mounted by insulating member so that form is not deformed within endoscope |
| US5840024A (en) | 1993-10-18 | 1998-11-24 | Olympus Optical Co., Ltd. | Endoscope form detecting apparatus in which coil is fixedly mounted by insulating member so that form is not deformed within endoscope |
| DE69408826T2 (de) * | 1994-03-18 | 1998-07-23 | Schneider Europ Ag | Magnetisches Resonanzdarstellungssystem zur Verfolgung eines Arzneigeräts |
| US5669383A (en) * | 1994-07-28 | 1997-09-23 | Sims Deltec, Inc. | Polyimide sheath for a catheter detector and method |
| EP0776176B1 (en) * | 1994-08-19 | 1999-12-29 | Biosense, Inc. | Medical diagnosis, treatment and imaging systems |
| EP0779790A1 (en) * | 1994-09-06 | 1997-06-25 | Sims Deltec, Inc. | Method and apparatus for location of a catheter tip |
| US5829444A (en) * | 1994-09-15 | 1998-11-03 | Visualization Technology, Inc. | Position tracking and imaging system for use in medical applications |
| US5762064A (en) * | 1995-01-23 | 1998-06-09 | Northrop Grumman Corporation | Medical magnetic positioning system and method for determining the position of a magnetic probe |
| US5817022A (en) | 1995-03-28 | 1998-10-06 | Sonometrics Corporation | System for displaying a 2-D ultrasound image within a 3-D viewing environment |
| US5830144A (en) | 1995-03-28 | 1998-11-03 | Vesely; Ivan | Tracking data sheath |
| US5795298A (en) * | 1995-03-28 | 1998-08-18 | Sonometrics Corporation | System for sharing electrocardiogram electrodes and transducers |
| US5868673A (en) * | 1995-03-28 | 1999-02-09 | Sonometrics Corporation | System for carrying out surgery, biopsy and ablation of a tumor or other physical anomaly |
| US5797849A (en) * | 1995-03-28 | 1998-08-25 | Sonometrics Corporation | Method for carrying out a medical procedure using a three-dimensional tracking and imaging system |
| US5730129A (en) * | 1995-04-03 | 1998-03-24 | General Electric Company | Imaging of interventional devices in a non-stationary subject |
| US5699801A (en) | 1995-06-01 | 1997-12-23 | The Johns Hopkins University | Method of internal magnetic resonance imaging and spectroscopic analysis and associated apparatus |
| US5729129A (en) * | 1995-06-07 | 1998-03-17 | Biosense, Inc. | Magnetic location system with feedback adjustment of magnetic field generator |
| US5954665A (en) * | 1995-06-07 | 1999-09-21 | Biosense, Inc. | Cardiac ablation catheter using correlation measure |
| US5718241A (en) * | 1995-06-07 | 1998-02-17 | Biosense, Inc. | Apparatus and method for treating cardiac arrhythmias with no discrete target |
| US5752513A (en) * | 1995-06-07 | 1998-05-19 | Biosense, Inc. | Method and apparatus for determining position of object |
| US5592939A (en) * | 1995-06-14 | 1997-01-14 | Martinelli; Michael A. | Method and system for navigating a catheter probe |
| CN1049288C (zh) | 1995-11-03 | 2000-02-09 | 邮电部武汉邮电学院研究院 | 自聚焦透镜型可调谐光滤波器单模尾纤准直器的制作方法 |
| EP0805987B1 (en) * | 1995-11-24 | 2004-12-15 | Koninklijke Philips Electronics N.V. | Mri-system and catheter for interventional procedures |
| US5944023A (en) * | 1995-12-07 | 1999-08-31 | Sims Deltec, Inc. | Systems and methods for determining the location of an implanted device including a magnet |
| US5711299A (en) * | 1996-01-26 | 1998-01-27 | Manwaring; Kim H. | Surgical guidance method and system for approaching a target within a body |
| DE69726415T2 (de) * | 1996-02-15 | 2004-09-16 | Biosense, Inc., Miami | Unabhängig einstellbare wandler für ortsbestimmungssysteme |
| AU706052B2 (en) * | 1996-02-15 | 1999-06-10 | Biosense, Inc. | Movable transmit or receive coils for location system |
| AU709081B2 (en) * | 1996-02-15 | 1999-08-19 | Biosense, Inc. | Medical procedures and apparatus using intrabody probes |
| DE69733249T8 (de) * | 1996-02-15 | 2006-04-27 | Biosense Webster, Inc., Diamond Bar | Bestimmung der genauen position von endoskopen |
| US5769843A (en) * | 1996-02-20 | 1998-06-23 | Cormedica | Percutaneous endomyocardial revascularization |
| WO1997032179A1 (en) * | 1996-02-27 | 1997-09-04 | Biosense, Inc. | Location system with field actuation sequences |
| US5727553A (en) * | 1996-03-25 | 1998-03-17 | Saad; Saad A. | Catheter with integral electromagnetic location identification device |
| CH690875A5 (de) * | 1996-05-21 | 2001-02-15 | Hts High Technology Systems Ag | Heim- und Gebäudeautomationssystem. |
| DE19622078A1 (de) | 1996-05-31 | 1997-12-04 | Siemens Ag | Vorrichtung zum Lokalisieren von Aktionsströmen im Herzen |
| US5843002A (en) | 1996-06-10 | 1998-12-01 | Baxter International Inc. | Guide wire dispenser apparatus and method |
| US5827202A (en) | 1996-06-10 | 1998-10-27 | Baxter International Inc. | Guide wire dispenser apparatus and method |
| US5904147A (en) * | 1996-08-16 | 1999-05-18 | University Of Massachusetts | Intravascular catheter and method of controlling hemorrhage during minimally invasive surgery |
| EP0864102B1 (en) * | 1996-09-02 | 2005-09-21 | Philips Electronics N.V. | Invasive device for use in a magnetic resonance imaging apparatus |
| SE9603314D0 (sv) * | 1996-09-12 | 1996-09-12 | Siemens Elema Ab | Förfarande och anordning för att bestämma läget hos en kateter inuti kroppen hos en patient |
| US6016439A (en) * | 1996-10-15 | 2000-01-18 | Biosense, Inc. | Method and apparatus for synthetic viewpoint imaging |
| EP0877949B1 (en) * | 1996-11-04 | 2005-03-16 | Koninklijke Philips Electronics N.V. | Mr system for interventional procedures |
| EP0846959B1 (en) * | 1996-12-05 | 2006-10-18 | Philips Medical Systems (Cleveland), Inc. | Nuclear magnetic resonance radio frequency coils |
| DE19653535C1 (de) * | 1996-12-20 | 1998-06-10 | Siemens Ag | Verfahren zur Positionsbestimmung mindestens einer Lokalantenne |
| NL1005068C2 (nl) * | 1997-01-23 | 1998-07-27 | Ct Rrn Academisch Ziekenhuis U | Cathetersysteem en een daarvan deel uitmakende catheter. |
| DE19706703A1 (de) * | 1997-02-20 | 1998-08-27 | Philips Patentverwaltung | MR-Verfahren und MR-Anordnung zur Bestimmung der Position einer Mikrospule |
| US6580938B1 (en) * | 1997-02-25 | 2003-06-17 | Biosense, Inc. | Image-guided thoracic therapy and apparatus therefor |
| US6019725A (en) * | 1997-03-07 | 2000-02-01 | Sonometrics Corporation | Three-dimensional tracking and imaging system |
| US6263230B1 (en) * | 1997-05-08 | 2001-07-17 | Lucent Medical Systems, Inc. | System and method to determine the location and orientation of an indwelling medical device |
| US6129668A (en) * | 1997-05-08 | 2000-10-10 | Lucent Medical Systems, Inc. | System and method to determine the location and orientation of an indwelling medical device |
| US5879297A (en) * | 1997-05-08 | 1999-03-09 | Lucent Medical Systems, Inc. | System and method to determine the location and orientation of an indwelling medical device |
| US6272370B1 (en) * | 1998-08-07 | 2001-08-07 | The Regents Of University Of Minnesota | MR-visible medical device for neurological interventions using nonlinear magnetic stereotaxis and a method imaging |
| DE19727081A1 (de) * | 1997-06-25 | 1999-01-07 | Siemens Ag | Verfahren zur Ortsbestimmung eines positionierbaren Objekts in einem Untersuchungsobjekt mittels magnetischer Resonanz und Vorrichtung zur Durchführung des Verfahrens |
| DE19830183A1 (de) * | 1997-07-04 | 1999-01-07 | Siemens Ag | Vorrichtung zur Temperaturmessung in medizintechnischen Anlagen |
| US6490474B1 (en) * | 1997-08-01 | 2002-12-03 | Cardiac Pathways Corporation | System and method for electrode localization using ultrasound |
| GB9717574D0 (en) * | 1997-08-19 | 1997-10-22 | Flying Null Ltd | Catheter location |
| DE19736030A1 (de) * | 1997-08-20 | 1999-02-25 | Philips Patentverwaltung | Verfahren zur Navigation eines magnetischen Objektes und MR-Anordung |
| US6024739A (en) * | 1997-09-05 | 2000-02-15 | Cordis Webster, Inc. | Method for detecting and revascularizing ischemic myocardial tissue |
| US5964757A (en) | 1997-09-05 | 1999-10-12 | Cordis Webster, Inc. | Steerable direct myocardial revascularization catheter |
| US6201387B1 (en) * | 1997-10-07 | 2001-03-13 | Biosense, Inc. | Miniaturized position sensor having photolithographic coils for tracking a medical probe |
| US6304769B1 (en) * | 1997-10-16 | 2001-10-16 | The Regents Of The University Of California | Magnetically directable remote guidance systems, and methods of use thereof |
| US5882304A (en) * | 1997-10-27 | 1999-03-16 | Picker Nordstar Corporation | Method and apparatus for determining probe location |
| US6014580A (en) * | 1997-11-12 | 2000-01-11 | Stereotaxis, Inc. | Device and method for specifying magnetic field for surgical applications |
| GB2331807B (en) * | 1997-11-15 | 2002-05-29 | Roke Manor Research | Catheter tracking system |
| US6104944A (en) * | 1997-11-17 | 2000-08-15 | Martinelli; Michael A. | System and method for navigating a multiple electrode catheter |
| US5938603A (en) * | 1997-12-01 | 1999-08-17 | Cordis Webster, Inc. | Steerable catheter with electromagnetic sensor |
| US6073043A (en) * | 1997-12-22 | 2000-06-06 | Cormedica Corporation | Measuring position and orientation using magnetic fields |
| US6052610A (en) * | 1998-01-09 | 2000-04-18 | International Business Machines Corporation | Magnetic catheter tracker and method therefor |
| US6223066B1 (en) * | 1998-01-21 | 2001-04-24 | Biosense, Inc. | Optical position sensors |
| US6009878A (en) * | 1998-02-02 | 2000-01-04 | Medtronic, Inc. | System for locating implantable medical device |
| AU735977B2 (en) * | 1998-02-25 | 2001-07-19 | Biosense, Inc. | Guided deployment of stents |
| SE9801006D0 (sv) * | 1998-03-25 | 1998-03-25 | Siemens Elema Ab | Method and arrangement for determining the location of a catheter within an animal body |
| IL138369A (en) * | 1998-03-30 | 2005-09-25 | Bioesence Inc | Three-axis coil sensor |
| US6173199B1 (en) * | 1998-05-05 | 2001-01-09 | Syncro Medical Innovations, Inc. | Method and apparatus for intubation of a patient |
| US6201987B1 (en) * | 1998-05-26 | 2001-03-13 | General Electric Company | Error compensation for device tracking systems employing electromagnetic fields |
| US6047214A (en) * | 1998-06-09 | 2000-04-04 | North Carolina State University | System and method for powering, controlling, and communicating with multiple inductively-powered devices |
| US6064905A (en) * | 1998-06-18 | 2000-05-16 | Cordis Webster, Inc. | Multi-element tip electrode mapping catheter |
| US6432041B1 (en) * | 1998-09-09 | 2002-08-13 | Olympus Optical Co., Ltd. | Endoscope shape detecting apparatus wherein form detecting processing is controlled according to connection state of magnetic field generating means |
| US6185448B1 (en) * | 1998-09-29 | 2001-02-06 | Simcha Borovsky | Apparatus and method for locating and mapping a catheter in intracardiac operations |
| US6230038B1 (en) * | 1999-02-01 | 2001-05-08 | International Business Machines Corporation | Imaging of internal structures of living bodies by sensing implanted magnetic devices |
| US6233476B1 (en) * | 1999-05-18 | 2001-05-15 | Mediguide Ltd. | Medical positioning system |
| US6246231B1 (en) * | 1999-07-29 | 2001-06-12 | Ascension Technology Corporation | Magnetic field permeable barrier for magnetic position measurement system |
| US6427079B1 (en) * | 1999-08-09 | 2002-07-30 | Cormedica Corporation | Position and orientation measuring with magnetic fields |
| US6298257B1 (en) * | 1999-09-22 | 2001-10-02 | Sterotaxis, Inc. | Cardiac methods and system |
| DE19946948A1 (de) * | 1999-09-30 | 2001-04-05 | Philips Corp Intellectual Pty | Verfahren und Anordnung zur Bestimmung der Position eines medizinischen Instruments |
| US6235038B1 (en) * | 1999-10-28 | 2001-05-22 | Medtronic Surgical Navigation Technologies | System for translation of electromagnetic and optical localization systems |
| US20010045826A1 (en) * | 2000-03-16 | 2001-11-29 | Schneider Mark R. | Distortion immune magnetic field generator for magnetic tracking systems and method of generating magnetic fields |
| AUPQ959200A0 (en) | 2000-08-23 | 2000-09-14 | Micronix Pty Ltd | Catheter locator apparatus and method of use |
| AUPR525001A0 (en) | 2001-05-24 | 2001-06-21 | Micronix Pty Ltd | Catheter locator apparatus and method of use |
| EP2258335A1 (en) * | 2000-08-23 | 2010-12-08 | Micronix Pty Ltd | Catheter locator apparatus and method of use |
| US6714809B2 (en) * | 2000-11-20 | 2004-03-30 | Surgi-Vision, Inc. | Connector and guidewire connectable thereto |
| US6584345B2 (en) * | 2001-03-13 | 2003-06-24 | Biosense, Inc. | Apparatus and method for measuring a plurality of electrical signals from the body of a patient |
| US20050080832A1 (en) | 2003-09-05 | 2005-04-14 | Stuebe Thomas D. | Esophageal waveform analysis for detection and quantification of reflux episodes |
| US8147486B2 (en) | 2003-09-22 | 2012-04-03 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Medical device with flexible printed circuit |
| EP1695684B1 (en) | 2005-02-25 | 2012-02-15 | Pulsion Medical Systems AG | Enteral feeding catheter, computer system and computer program for operating the feeding catheter |
| US20080097179A1 (en) | 2006-07-03 | 2008-04-24 | Russo Susan H | Feeding tube system with reflux fluid sensing |
| US9295395B2 (en) | 2007-03-02 | 2016-03-29 | Art Healthcare Ltd. | Interactive NGT system |
| WO2008124643A1 (en) | 2007-04-05 | 2008-10-16 | Velomedix, Inc. | Device and method for safe access to a body cavity |
| EP2155300A1 (en) | 2007-04-05 | 2010-02-24 | Velomedix, Inc | Automated therapy system and method |
| US8986230B2 (en) | 2007-07-19 | 2015-03-24 | C. R. Bard, Inc. | NG tube with gastric volume detection |
| EP2344026B1 (en) | 2008-08-28 | 2013-11-06 | Koninklijke Philips N.V. | A device, apparatus and method for obtaining physiological signals by way of a feeding tube |
| AU2011210363B2 (en) | 2010-01-28 | 2016-03-10 | Art Healthcare Ltd. | Method and device of detecting and/or blocking reflux |
| GB2496074B (en) | 2010-07-13 | 2016-07-20 | Sandhill Scient Inc | Apparatus and method for detecting and measuring condition of esophageal mucosa and indications of gastroesophageal reflux disease |
| US20120277619A1 (en) | 2011-04-29 | 2012-11-01 | Medtronic, Inc. | Detecting food intake based on impedance |
| WO2012174102A2 (en) | 2011-06-14 | 2012-12-20 | Medical Defense Technologies, Llc. | Methods and apparatus for guiding medical care based on detected gastric function |
| US9179971B2 (en) | 2013-02-11 | 2015-11-10 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Printed electrode catheter |
| WO2015120285A1 (en) | 2014-02-06 | 2015-08-13 | Theranova, Llc | Devices and methods to measure gastric residual volume |
| DK2999451T3 (en) | 2014-03-13 | 2018-08-13 | Art Medical Ltd | COMBINED MEASUREMENT POSITIONING AND OR MONITORING OF NASO / OROGASTRIC NUTRITION SENSES |
| WO2016084090A1 (en) | 2014-11-26 | 2016-06-02 | Art Healthcare Ltd. | Closed loop system and method for optimal enteral feeding and a personalized nutrition plan |
| EP4335373A2 (en) | 2015-05-20 | 2024-03-13 | Gravitas Medical, Inc. | Methods and apparatus for guiding medical care based on sensor data from the gastrointestinal tract |
| AU2017374969B2 (en) | 2016-12-12 | 2022-09-01 | Art Healthcare Ltd. | Systems and methods for automatic management of reflux during enteral feeding |
-
2001
- 2001-08-23 EP EP10008275A patent/EP2258335A1/en not_active Withdrawn
- 2001-08-23 AU AU8370301A patent/AU8370301A/xx active Pending
- 2001-08-23 EP EP11003976A patent/EP2380550A3/en not_active Withdrawn
- 2001-08-23 CA CA2420676A patent/CA2420676C/en not_active Expired - Lifetime
- 2001-08-23 WO PCT/AU2001/001051 patent/WO2002015973A1/en active Application Filing
- 2001-08-23 JP JP2002520893A patent/JP2004505748A/ja active Pending
- 2001-08-23 EP EP01962474A patent/EP1311226A4/en not_active Ceased
- 2001-08-23 US US10/362,273 patent/US20040087877A1/en not_active Abandoned
- 2001-08-23 AU AU2001283703A patent/AU2001283703B2/en not_active Expired
-
2006
- 2006-05-22 AU AU2006202149A patent/AU2006202149B2/en not_active Expired
-
2009
- 2009-12-23 US US12/646,263 patent/US8265732B2/en not_active Expired - Lifetime
-
2010
- 2010-09-24 JP JP2010212975A patent/JP5380410B2/ja not_active Expired - Lifetime
-
2012
- 2012-08-09 US US13/570,999 patent/US8606347B2/en not_active Expired - Lifetime
-
2013
- 2013-04-05 US US13/857,819 patent/US9585599B2/en not_active Expired - Lifetime
- 2013-12-09 US US14/100,847 patent/US8934960B2/en not_active Expired - Fee Related
-
2017
- 2017-01-26 US US15/416,735 patent/US10058268B2/en not_active Expired - Fee Related
-
2018
- 2018-07-31 US US16/049,914 patent/US11253166B2/en not_active Expired - Lifetime
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05177000A (ja) * | 1991-12-30 | 1993-07-20 | Shimadzu Corp | カテーテルガイド装置 |
| JPH07111969A (ja) * | 1993-10-18 | 1995-05-02 | Olympus Optical Co Ltd | 内視鏡挿入状態検出装置 |
| JPH08542A (ja) * | 1994-04-21 | 1996-01-09 | Olympus Optical Co Ltd | 内視鏡位置検出装置 |
| JPH0984745A (ja) * | 1995-07-17 | 1997-03-31 | Olympus Optical Co Ltd | 内視鏡形状検出装置 |
| JPH11226129A (ja) * | 1997-11-15 | 1999-08-24 | Roke Manor Res Ltd | カテーテル追跡システム |
Cited By (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11207496B2 (en) | 2005-08-24 | 2021-12-28 | C. R. Bard, Inc. | Stylet apparatuses and methods of manufacture |
| US10004875B2 (en) | 2005-08-24 | 2018-06-26 | C. R. Bard, Inc. | Stylet apparatuses and methods of manufacture |
| US9833169B2 (en) | 2006-10-23 | 2017-12-05 | Bard Access Systems, Inc. | Method of locating the tip of a central venous catheter |
| US8388546B2 (en) | 2006-10-23 | 2013-03-05 | Bard Access Systems, Inc. | Method of locating the tip of a central venous catheter |
| US7794407B2 (en) | 2006-10-23 | 2010-09-14 | Bard Access Systems, Inc. | Method of locating the tip of a central venous catheter |
| US10524691B2 (en) | 2007-11-26 | 2020-01-07 | C. R. Bard, Inc. | Needle assembly including an aligned magnetic element |
| US11779240B2 (en) | 2007-11-26 | 2023-10-10 | C. R. Bard, Inc. | Systems and methods for breaching a sterile field for intravascular placement of a catheter |
| US9681823B2 (en) | 2007-11-26 | 2017-06-20 | C. R. Bard, Inc. | Integrated system for intravascular placement of a catheter |
| US10751509B2 (en) | 2007-11-26 | 2020-08-25 | C. R. Bard, Inc. | Iconic representations for guidance of an indwelling medical device |
| US11707205B2 (en) | 2007-11-26 | 2023-07-25 | C. R. Bard, Inc. | Integrated system for intravascular placement of a catheter |
| US11529070B2 (en) | 2007-11-26 | 2022-12-20 | C. R. Bard, Inc. | System and methods for guiding a medical instrument |
| US8388541B2 (en) | 2007-11-26 | 2013-03-05 | C. R. Bard, Inc. | Integrated system for intravascular placement of a catheter |
| US9999371B2 (en) | 2007-11-26 | 2018-06-19 | C. R. Bard, Inc. | Integrated system for intravascular placement of a catheter |
| US8849382B2 (en) | 2007-11-26 | 2014-09-30 | C. R. Bard, Inc. | Apparatus and display methods relating to intravascular placement of a catheter |
| US11134915B2 (en) | 2007-11-26 | 2021-10-05 | C. R. Bard, Inc. | System for placement of a catheter including a signal-generating stylet |
| US10105121B2 (en) | 2007-11-26 | 2018-10-23 | C. R. Bard, Inc. | System for placement of a catheter including a signal-generating stylet |
| US10165962B2 (en) | 2007-11-26 | 2019-01-01 | C. R. Bard, Inc. | Integrated systems for intravascular placement of a catheter |
| US10231753B2 (en) | 2007-11-26 | 2019-03-19 | C. R. Bard, Inc. | Insertion guidance system for needles and medical components |
| US11123099B2 (en) | 2007-11-26 | 2021-09-21 | C. R. Bard, Inc. | Apparatus for use with needle insertion guidance system |
| US10238418B2 (en) | 2007-11-26 | 2019-03-26 | C. R. Bard, Inc. | Apparatus for use with needle insertion guidance system |
| US10966630B2 (en) | 2007-11-26 | 2021-04-06 | C. R. Bard, Inc. | Integrated system for intravascular placement of a catheter |
| US10342575B2 (en) | 2007-11-26 | 2019-07-09 | C. R. Bard, Inc. | Apparatus for use with needle insertion guidance system |
| US10849695B2 (en) | 2007-11-26 | 2020-12-01 | C. R. Bard, Inc. | Systems and methods for breaching a sterile field for intravascular placement of a catheter |
| US10449330B2 (en) | 2007-11-26 | 2019-10-22 | C. R. Bard, Inc. | Magnetic element-equipped needle assemblies |
| US9649048B2 (en) | 2007-11-26 | 2017-05-16 | C. R. Bard, Inc. | Systems and methods for breaching a sterile field for intravascular placement of a catheter |
| US10602958B2 (en) | 2007-11-26 | 2020-03-31 | C. R. Bard, Inc. | Systems and methods for guiding a medical instrument |
| US9636031B2 (en) | 2007-11-26 | 2017-05-02 | C.R. Bard, Inc. | Stylets for use with apparatus for intravascular placement of a catheter |
| US8478382B2 (en) | 2008-02-11 | 2013-07-02 | C. R. Bard, Inc. | Systems and methods for positioning a catheter |
| US11027101B2 (en) | 2008-08-22 | 2021-06-08 | C. R. Bard, Inc. | Catheter assembly including ECG sensor and magnetic assemblies |
| US9901714B2 (en) | 2008-08-22 | 2018-02-27 | C. R. Bard, Inc. | Catheter assembly including ECG sensor and magnetic assemblies |
| US9907513B2 (en) | 2008-10-07 | 2018-03-06 | Bard Access Systems, Inc. | Percutaneous magnetic gastrostomy |
| US11419517B2 (en) | 2009-06-12 | 2022-08-23 | Bard Access Systems, Inc. | Apparatus and method for catheter navigation using endovascular energy mapping |
| US10912488B2 (en) | 2009-06-12 | 2021-02-09 | Bard Access Systems, Inc. | Apparatus and method for catheter navigation and tip location |
| US10271762B2 (en) | 2009-06-12 | 2019-04-30 | Bard Access Systems, Inc. | Apparatus and method for catheter navigation using endovascular energy mapping |
| US10231643B2 (en) | 2009-06-12 | 2019-03-19 | Bard Access Systems, Inc. | Apparatus and method for catheter navigation and tip location |
| US10639008B2 (en) | 2009-10-08 | 2020-05-05 | C. R. Bard, Inc. | Support and cover structures for an ultrasound probe head |
| US11103213B2 (en) | 2009-10-08 | 2021-08-31 | C. R. Bard, Inc. | Spacers for use with an ultrasound probe |
| US10046139B2 (en) | 2010-08-20 | 2018-08-14 | C. R. Bard, Inc. | Reconfirmation of ECG-assisted catheter tip placement |
| US10820885B2 (en) | 2012-06-15 | 2020-11-03 | C. R. Bard, Inc. | Apparatus and methods for detection of a removable cap on an ultrasound probe |
| US10863920B2 (en) | 2014-02-06 | 2020-12-15 | C. R. Bard, Inc. | Systems and methods for guidance and placement of an intravascular device |
| US9839372B2 (en) | 2014-02-06 | 2017-12-12 | C. R. Bard, Inc. | Systems and methods for guidance and placement of an intravascular device |
| US10973584B2 (en) | 2015-01-19 | 2021-04-13 | Bard Access Systems, Inc. | Device and method for vascular access |
| US11026630B2 (en) | 2015-06-26 | 2021-06-08 | C. R. Bard, Inc. | Connector interface for ECG-based catheter positioning system |
| US10349890B2 (en) | 2015-06-26 | 2019-07-16 | C. R. Bard, Inc. | Connector interface for ECG-based catheter positioning system |
| US11000207B2 (en) | 2016-01-29 | 2021-05-11 | C. R. Bard, Inc. | Multiple coil system for tracking a medical device |
| US10992079B2 (en) | 2018-10-16 | 2021-04-27 | Bard Access Systems, Inc. | Safety-equipped connection systems and methods thereof for establishing electrical connections |
| US11621518B2 (en) | 2018-10-16 | 2023-04-04 | Bard Access Systems, Inc. | Safety-equipped connection systems and methods thereof for establishing electrical connections |
| JP7354240B2 (ja) | 2018-10-30 | 2023-10-02 | コリンダス、インコーポレイテッド | 経路を通し目標位置へデバイスを案内するシステム及び方法 |
| JP2022515959A (ja) * | 2018-10-30 | 2022-02-24 | コリンダス、インコーポレイテッド | 経路を通し目標位置へデバイスを案内するシステム及び方法 |
| US11918423B2 (en) | 2018-10-30 | 2024-03-05 | Corindus, Inc. | System and method for navigating a device through a path to a target location |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2380550A2 (en) | 2011-10-26 |
| CA2420676C (en) | 2010-07-06 |
| US8606347B2 (en) | 2013-12-10 |
| US20100097373A1 (en) | 2010-04-22 |
| US20040087877A1 (en) | 2004-05-06 |
| EP1311226A4 (en) | 2008-12-17 |
| US10058268B2 (en) | 2018-08-28 |
| US20130035589A1 (en) | 2013-02-07 |
| AU2006202149A1 (en) | 2006-06-15 |
| AU8370301A (en) | 2002-03-04 |
| US9585599B2 (en) | 2017-03-07 |
| EP2380550A3 (en) | 2012-10-31 |
| EP2258335A1 (en) | 2010-12-08 |
| WO2002015973A1 (en) | 2002-02-28 |
| EP1311226A1 (en) | 2003-05-21 |
| JP5380410B2 (ja) | 2014-01-08 |
| US8265732B2 (en) | 2012-09-11 |
| US20170143235A1 (en) | 2017-05-25 |
| AU2001283703B2 (en) | 2006-05-25 |
| US8934960B2 (en) | 2015-01-13 |
| AU2006202149B2 (en) | 2009-03-12 |
| US11253166B2 (en) | 2022-02-22 |
| US20180344201A1 (en) | 2018-12-06 |
| US20140100450A1 (en) | 2014-04-10 |
| CA2420676A1 (en) | 2002-02-28 |
| US20130218006A1 (en) | 2013-08-22 |
| JP2011045726A (ja) | 2011-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11253166B2 (en) | Catheter locator apparatus and method of use | |
| AU2001283703A1 (en) | Catheter locator apparatus and method of use | |
| US9918907B2 (en) | Method for electromagnetic guidance of feeding and suctioning tube assembly | |
| AU2006206037A2 (en) | Guiding insert assembly for a catheter used with a catheter position guidance system | |
| MX2014011884A (es) | Dispositivos y sistemas para navegacion y para posicionar un cateter venoso central dentro de un paciente. | |
| AU2020322475A1 (en) | Medical device position notification system | |
| US10350145B2 (en) | Nasogastric tube | |
| US11944761B2 (en) | System and method for medical device position guidance | |
| EP3207915A1 (en) | Nasogastric tube | |
| US20220011146A1 (en) | Airway Detection Using Air Pressure Differential |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080819 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20080819 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101207 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110426 |