JP2004362120A - 画像処理方法および装置並びにプログラム - Google Patents
画像処理方法および装置並びにプログラム Download PDFInfo
- Publication number
- JP2004362120A JP2004362120A JP2003157878A JP2003157878A JP2004362120A JP 2004362120 A JP2004362120 A JP 2004362120A JP 2003157878 A JP2003157878 A JP 2003157878A JP 2003157878 A JP2003157878 A JP 2003157878A JP 2004362120 A JP2004362120 A JP 2004362120A
- Authority
- JP
- Japan
- Prior art keywords
- value
- search
- image
- interpolation
- search point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000003672 processing method Methods 0.000 title claims description 13
- 238000000034 method Methods 0.000 claims description 29
- 238000000605 extraction Methods 0.000 claims description 10
- 230000015556 catabolic process Effects 0.000 abstract 1
- 238000006731 degradation reaction Methods 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 4
- 230000000593 degrading effect Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000002591 computed tomography Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
Images



Landscapes
- Magnetic Resonance Imaging Apparatus (AREA)
- Processing Or Creating Images (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
【課題】特定のハードウェアを必要とせず、画像劣化のない、高速なMIP(最大値投影)処理を可能にする。
【解決手段】3次元画像である原画像Aの8近傍画素毎の最大値を予め抽出しておく。原画像Aを任意方向Dへ最大値投影するための最大値検索を行う際に、各検索点Hにおいて原画像Aの8近傍画素からの線形補間により補間値を算出して、既に得られている最大値候補との比較を行う前に、抽出された検索点の8近傍画素の最大値と候補値との比較を行い、候補値の更新可能性がある場合のみ、補間値の演算処理および比較更新を行う。
【選択図】 図2
【解決手段】3次元画像である原画像Aの8近傍画素毎の最大値を予め抽出しておく。原画像Aを任意方向Dへ最大値投影するための最大値検索を行う際に、各検索点Hにおいて原画像Aの8近傍画素からの線形補間により補間値を算出して、既に得られている最大値候補との比較を行う前に、抽出された検索点の8近傍画素の最大値と候補値との比較を行い、候補値の更新可能性がある場合のみ、補間値の演算処理および比較更新を行う。
【選択図】 図2
Description
【0001】
【発明の属する技術分野】
本発明は、画像処理に関し、特に詳しくは、3次元画像のMIP(最大値投影)処理およびMinIP(最小値投影)処理の高速化に関するものである。
【0002】
【従来の技術】
従来、CT装置、MRI装置、超音波診断装置(エコー)等で得られる3次元画像を、所望の方向に投影して投影画像を得ることが行われている。このような投影画像を得るための処理としては、投影方向について最大画素値を抽出して投影するMIP(Maximum Intensity Projection)処理や最小画素値を抽出して投影するMinIP(Minimum Intensity Projection)処理が知られている。
【0003】
上記のMIP処理やMinIP処理では、投影方向の各画素列に対して最大値や最小値を検索する必要があるが、特に、任意の方向に投影するような場合には、通常、上記最大値または最小値の検索すべき位置が3次元画像上の画素に重ならないため、3次元画像の各画素に対応する、投影方向に揃った検索点を設定し、これらの検索点において近傍画素から補間値を算出し、その補間値の最大値や最小値を検索する。そのため、任意の方向へ投影する場合には、補間値を算出するための演算量が膨大なものとなり、最大値あるいは最小値の検索にはかなりの時間を要する。そこで、これまでに、このようなMIP処理やMinIP処理における高速化の手法が、種々提案されている。
【0004】
例えば、上記演算をさせるための計算機に複数のCPUを設けて、並列処理を行わせることにより、演算に要する時間を短縮させる手法や、投影すべき方向に伸びる各画素列から、最大値あるいは最小値を有する画素を検索する際に、画素列中の一部の画素のみを検索対象画素として検索する、いわゆる間引き手法(例えば、特許文献1)などがある。
【0005】
【特許文献1】
特開2001−236492号公報
【0006】
【発明が解決しようとする課題】
しかしながら、上記の並列処理による手法では、複数のCPUが設けられた特定のハードウェアが必要になるので、汎用の計算機を手軽に用いることができず、コスト高にもつながる。また、上記の間引きによる手法では、間引いた画素(または検索点)の中に真の最大値や最小値を有する画素が存在していることもあり、常に真の最大値や最小値が検索されるわけではないので、投影画像の画質が劣化してしまうという問題があった。
【0007】
本発明は、上記問題点に鑑み、特定のハードウェアを必要とせず、また投影画像の画質を劣化させることなく、MIP処理あるいはMinIP処理の高速化が可能な画像処理方法および装置並びにそのためのプログラムを提供することを目的とするものである。
【0008】
【課題を解決するための手段】
本発明は、時間のかかる補間値の算出回数をできるだけ少なくすることにより、MIP処理またはMinIP処理の高速化を図るものである。
【0009】
本発明の画像処理方法は、一定の間隔で3次元的に配列された画素からなる3次元画像において、当該3次元画像を投影すべき任意の方向に平行な多数の列に沿って並ぶ多数の検索点を設定するステップと、投影すべき方向に沿って並ぶ検索点の各列毎に、検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、当該最大値/最小値の候補値を検索点毎に順次更新することにより検索するステップと、検索された列毎の最大値/最小値に基づいて3次元画像の投影画像を形成するステップとを有する画像処理方法において、上記検索するステップの前に、3次元画像において、各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出するステップを有し、上記検索するステップが、検索点の各々において、候補値と、検索点を包含する部分領域毎に、上記抽出するステップにおいて抽出された画素の最大値/最小値とを比較することにより、検索点において候補値が更新される可能性があるか否かを判定するステップを有し、候補値が更新される可能性があると判定されたときにのみ、検索点における補間値を算出することを特徴とする方法である。
【0010】
ここで、「最大値/最小値」とは、最大値あるいは最小値のうち、いずれか一方を意味するものであり、同一文内における当該「最大値/最小値」の表現は、一貫して、「最大値」あるいは「最小値」のどちらか一方に読み替えるものとする。
【0011】
「8近傍画素」とは、立方体の各頂点の位置に対応するような位置関係にある近傍8個の画素のことである。
【0012】
そして、「検索点において8近傍画素の線形補間により算出される補間値」とは、検索点の近傍8個の画素の各値を、その検索点と画素との距離で重み付けして線形に加算することにより得られる補間値のことである。
【0013】
上記「検索点において候補値が更新される可能性があるか否かを判定する」は、具体的には、例えば「最大値」を投影する場合、それまでに得られた最大値の候補値と、検索対象となっている検索点を包含する部分領域毎に、抽出するステップにおいて抽出された画素の最大値とを比較して、抽出された最大値が候補値より大きいときは、候補値が更新される可能性があると判定し、抽出された最大値が候補値より小さいときは、候補値が更新される可能性がないと判定する。このように判定する理由は、検索点における補間値は8近傍画素の線形補間により算出されるが、この補間は内挿補間となるため、その補間値は8近傍画素の最小値から最大値の間の値に限定されるからである。なお、「最小値」を投影する場合も、同様の考え方により、抽出された最小値が候補値より小さいときは、候補値が更新される可能性があると判定し、そうでないときは、更新される可能性がないと判定する。
【0014】
本発明の画像処理方法において、上記検索点を設定するステップは、検索点を、上記一定の間隔と略等しい間隔で設定するステップとすることが好ましい。
【0015】
また、上記検索するステップは、検索された補間値の最大値/最小値を有する検索点の位置を記憶するステップをさらに有し、既に検索された列に隣接する列において、補間値の最大値/最小値を検索する際に、既に検索された列における上記位置の近傍側から検索するステップとしてもよい。
【0016】
この場合、検索対象の列に隣接する、「既に検索された列」が、複数存在するときには、所定の方向に隣接する列を優先して採用するようにしてもよいし、ランダムに採用するようにしてもよい。
【0017】
本発明の画像処理装置は、一定の間隔で3次元的に配列された画素からなる3次元画像を入力する画像入力手段と、3次元画像を投影する任意の方向を設定する投影方向設定手段と、3次元画像において、投影する方向に平行な多数の列に沿って並ぶ多数の検索点を設定する検索点設定手段と、投影する方向に沿って並ぶ検索点の各列毎に、検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、当該最大値/最小値の候補値を検索点毎に順次更新することにより検索する検索手段と、検索された列毎の最大値/最小値に基づいて、3次元画像の投影画像を形成する投影画像形成手段とを備えた画像処理装置において、3次元画像において各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出する抽出手段をさらに備え、上記検索手段が、検索点の各々において、候補値と、検索点を包含する部分領域毎に、上記抽出手段により抽出された画素の最大値/最小値とを比較して、検索点において候補値が更新される可能性があると判定されたときにのみ、検索点における補間値を算出するものであることを特徴とするものである。
【0018】
なお、本発明の画像処理装置において、上記検索点設定手段は、検索点を、上記一定の間隔と略等しい間隔で設定するステップとすることが好ましい。
【0019】
また、上記検索手段は、検索された補間値の最大値/最小値を有する検索点の位置を記憶するものであり、既に検索された列に隣接する列において、補間値の最大値/最小値を検索する際に、既に検索された列における上記位置の近傍側から検索するものとしてもよい。
【0020】
本発明のプログラムは、一定の間隔で3次元的に配列された画素からなる3次元画像において、3次元画像を投影すべき任意の方向に平行な多数の列に沿って並ぶ多数の検索点を設定するステップと、投影すべき方向に沿って並ぶ検索点の各列毎に、検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、当該最大値/最小値の候補値を前記検索点毎に順次更新することにより検索するステップと、検索された列毎の最大値/最小値に基づいて、3次元画像の投影画像を形成するステップとを有する画像処理をコンピュータに実行させるためのプログラムにおいて、検索するステップの前に、3次元画像において、各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出するステップを有し、検索するステップが、検索点の各々において、候補値と、検索点を包含する部分領域毎に、上記抽出するステップにおいて抽出された画素の最大値/最小値とを比較することにより、検索点において候補値が更新される可能性があるか否かを判定するステップを有し、候補値が更新される可能性があると判定されたときにのみ、検索点における補間値を算出するようにしたことを特徴とするものである。
【0021】
なお、本発明において、3次元画像は医用画像であってもよく、例えば、CTスキャン装置やMRI装置、超音波診断装置(エコー)などにより撮影された画像を考えることができる。
【0022】
【発明の効果】
本発明の画像処理方法および装置によれば、演算の並列処理等の、ハードウェア構成に依存する処理は含まれておらず、また、検索対象を間引かずに全検索点を検索対象としていることから真の最大値あるいは最小値を確実に検索することができ、さらに、候補値が更新される可能性のあるときにのみ補間処理を行うことにより時間のかかる補間演算をできるだけ省略することができるので、特定のハードウェアを必要とせず、また投影画像の画質を劣化させることなく、MIP処理あるいはMinIP処理を高速化できる。
【0023】
また、本発明の画像処理方法および装置は、上述の通り、補間処理をできるだけ省略することによりMIP処理あるいはMinIP処理を高速化するものであるから、対話的処理で任意方向の投影を行う場合、すなわち、投影方向が予め決まっておらず、任意の投影方向を指定するとともに、その都度、投影画像を形成し直すようなリアルタイムな処理の場合に、特に有効である。
【0024】
なお、本発明の画像処理方法において、検索点を設定するステップを、検索点を、3次元画像を構成する画素の間隔と略等しい間隔で設定するステップとすれば、演算に要する時間と投影画像の画質とのバランスがよくなり、画質の劣化を十分に防ぎながら、高速なMIP処理あるいはMinIP処理を実現できる。
【0025】
また、検索するステップを、検索された補間値の最大値/最小値を有する検索点の位置を記憶するステップをさらに有し、既に検索された列に隣接する列において、補間値の最大値/最小値を検索する際に、既に検索された列における上記位置の近傍側から検索するステップとすれば、一般的に、上記の最大値/最小値は3次元的に連続していることが多いため、真の最大値あるいは最小値がより早い段階で検索される確率が高くなり、時間のかかる補間処理をさらに省略できる可能性があり、MIP処理あるいはMinIP処理のさらなる高速化が期待できる。
【0026】
本発明の画像処理装置において、検索点設定手段を、検索点を、3次元画像を構成する画素の間隔と略等しい間隔で設定するものとすれば、演算に要する時間と投影画像の画質とのバランスがよくなり、画質の劣化を十分に防ぎながら、高速なMIP処理あるいはMinIP処理を実現できる。
【0027】
また、検索手段を、検索された補間値の最大値/最小値を有する検索点の位置を記憶するものとし、既に検索された列に隣接する列において、補間値の最大値/最小値を検索する際に、既に検索された列における上記位置の近傍側から検索するものとすれば、一般的に、上記の最大値あるいは最小値は3次元的に連続していることが多いため、上記画像処理方法と同様に、真の最大値あるいは最小値がより早い段階で検索される確率が高くなり、時間のかかる補間処理をさらに省略できる可能性があり、MIP処理あるいはMinIP処理のさらなる高速化が期待できる。
【0028】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。図1は、本発明による画像処理装置の一実施形態の概略構成を示すブロック図である。
【0029】
図1に示す画像処理装置1は、一定の間隔で3次元的に配列された画素からなる3次元画像としての原画像Aを入力する画像入力手段10と、原画像Aにおいて各8近傍画素を頂点とする各部分領域毎に画素の最大値Bを抽出する抽出手段20と、原画像Aを投影する任意の方向(以下、投影方向という)Dを設定する投影方向設定手段30と、原画像Aにおいて、投影方向Dに平行な多数の列に沿って並ぶ多数の検索点Hを、原画像Aと等しい間隔で設定する検索点設定手段40と、投影方向Dに沿って並ぶ検索点の各列L毎に、検索点において8近傍画素の線形補間により算出される補間値の最大値Hmを、その最大値の候補値Kを検索点毎に順次更新することにより検索する検索手段50と、検索された列L毎の最大値Hmに基づいて、3次元画像の投影画像A′を形成する投影画像形成手段60とを備えている。
【0030】
検索手段50は、検索点Hの各々において、候補値Kと検索点Hを包含する部分領域に対応する上記抽出された値とを比較して、その検索点Hにおいて候補値Kが更新される可能性があると判定されたときにのみ、検索点Hにおける補間値Hを算出するとともに、この算出された補間値Hが候補値Kとしてより適しているときに、この補間値Hを候補値Kとして更新する。
【0031】
次に、本画像処理装置1の作用について説明する。
【0032】
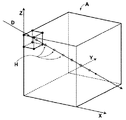
画像入力手段10は、MRI装置やCT装置などの画像取得手段によって取得された、被写体の3次元画像である原画像Aを入力し、図2に示すような、xyzの直交座標系で表される仮想的な第1の画像空間に記憶させる。
【0033】
抽出手段20は、第1の画像空間上の原画像Aにおいて、図2に示すような、立方体状の近傍8点の画素からなる各部分領域毎の画素の最大値Bを抽出し、抽出された各最大値Bを、各部分領域を代表する所定の画素の座標位置に対応させて、xyzの直交座標系で表される仮想的な第2の画像空間に記憶させる。図3は、上記部分領域の拡大図を示している。具体的には、第1の画像空間上の座標(i,j,k)における画素の値をA(i,j,k)、第2の画像空間上の座標(i,j,k)における画素の値をB(i,j,k)として、下式(1)のように対応させる。
【0034】
【数1】
 一方、投影方向設定手段30によって、原画像Aを投影する所望の投影方向Dが設定されると、検索点設定手段40が、第1の画像空間上において、原画像Aを構成する各画素と同じピッチで、かつ、投影方向Dに揃えて、検索点Hを設定する。
一方、投影方向設定手段30によって、原画像Aを投影する所望の投影方向Dが設定されると、検索点設定手段40が、第1の画像空間上において、原画像Aを構成する各画素と同じピッチで、かつ、投影方向Dに揃えて、検索点Hを設定する。
【0035】
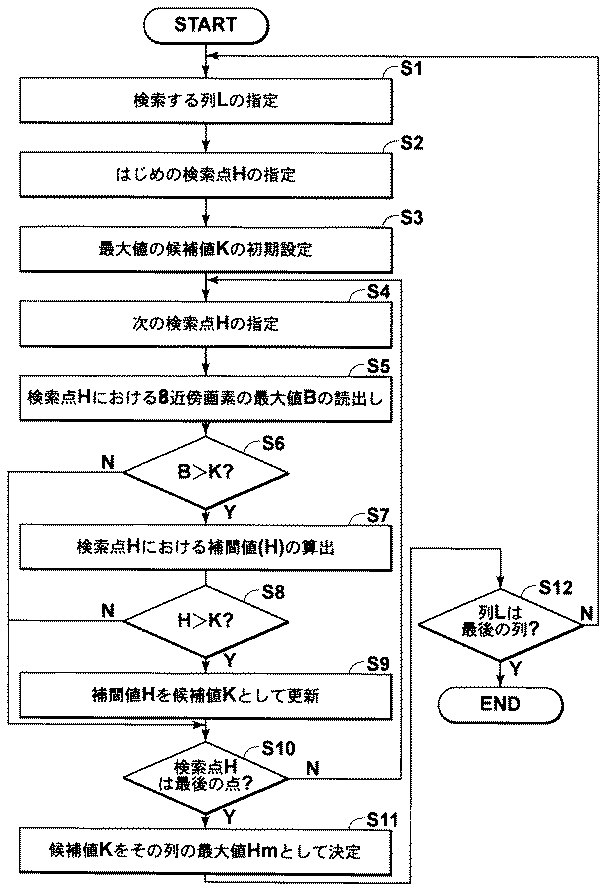
検索手段50は、投影方向に並ぶ検索点の各列L毎に、検索点Hにおける8個の近傍画素の線形補間により算出される補間値の最大値Hmを、各検索点H毎にその最大値の候補値Kを順次更新することにより検索してゆく。この最大値検索は、図4に示すようなフローに従って行われる。
【0036】
まず、第1の画像空間において、最大値を検索する検索点の列Lを指定する(ステップS1)。指定された列Lのいずれか一方の端の検索点Hを指定し(ステップS2)、指定された検索点Hにおける補間値Hを算出して、この算出された値を最大値の初期の候補値Kとして設定する(ステップS3)。指定された列に沿って次の検索点Hを指定する(ステップS4)。この検索点Hの座標に基づいて、この検索点Hの8近傍画素における最大値Bを、第2の画像空間から読出し(ステップS5)、読み出された最大値Bが候補値Kより大きいか否かを判定する(ステップS6)。座標位置(i+α,j+β,k+γ),0≦α,β,γ<1 の検索点における補間値は、A(i,j,k),A(i+1,j,k),A(i,j+1,k),A(i+1,j+1,k),A(i,j,k+1),A(i+1,j,k+1),A(i,j+1,k+1),A(i+1,j+1,k+1)の8近傍画素の線形補間により求まるが(図3参照)、内挿補間となるため、補間値は8近傍画素の最小値から最大値の間の値になる。したがって、読み出された最大値Bが候補値Kより大きいときは、その検索点Hにおいて、候補値Kが更新される可能性があるので、この場合は、その検索点Hの8近傍画素に基づいて補間演算を行い、補間値Hを算出する(ステップS7)。一方、ステップS6において、読み出された最大値Bが候補値Kより小さいときは、その検索点Hにおいて、候補値Kが更新される可能性はないので、ステップS10に移行する。そして、ステップS7において算出された補間値Hが候補値Kより大きいか否かを判定し(ステップS8)、補間値Hが候補値Kより大きいときは、この補間値Hを候補値Kとして更新し(ステップS9)、補間値Hが候補値Kより小さいときは、ステップS10に移行する。そして、ステップS9の後、指定されている検索点Hが、指定された列Lの最後であるか否かを判定し(ステップS10)、最後であれば、この時の候補値Kを指定された列Lにおける補間値の最大値Hmとして決定し(ステップS11)、最後でなければ、ステップS4に移行する。ステップS11の後、指定されている列Lが最後の列であるか否かを判定し(ステップS12)、最後であれば、最大値検索を終了し、最後でなければ、ステップS1に移行する。
【0037】
投影画像形成手段60は、上記のようにして得られた各列L毎の補間値の最大値Hmに基づいて、原画像Aを投影方向Dに最大値投影した投影画像A′を形成する。
【0038】
このような、本画像処理装置1によれば、演算の並列処理等のハードウェア構成に依存する処理は含まれておらず、また、検索対象を間引かずに全検索点を検索対象としていることから真の最大値を確実に検索することができ、さらに、候補値が更新される可能性のあるときにのみ補間処理を行うことにより時間のかかる補間演算をできるだけ省略することができるので、特定のハードウェアを必要とせず、また投影画像の画質を劣化させることなく、MIP処理あるいはMinIP処理を高速化できる。
【0039】
また、本画像処理装置1は、上述の通り、補間処理をできるだけ省略することによりMIP処理を高速化するものであるから、対話的処理で任意方向の投影を行う場合、すなわち、投影方向が予め決まっておらず、任意の投影方向を指定するとともにその都度投影画像を形成し直すような、補間処理がリアルタイムで頻繁に行われるような場合に、特に有効である。
【0040】
なお、本画像処理装置1において、検索手段50を、検索された補間値の最大値を有する検索点の位置を記憶するものとし、既に検索された列に隣接する列において、補間値の最大値を検索する際に、既に検索された列における上記位置の近傍側から検索するものとすれば、一般的に、上記の最大値は3次元的に連続していることが多いため、真の最大値がより早い段階で検索される確率が高くなり、時間のかかる補間処理をさらに省略できる可能性があり、MIP処理のさらなる高速化が期待できる。
【0041】
なお、本実施形態においては、補間値の最大値投影を行うMIP処理を例に記述したが、補間値の最小値投影を行うMinIP処理においても同様に、適用可能である。
【0042】
また、抽出手段20による各部分領域毎の画素の最大値の抽出は、画像入力手段10による原画像Aの入力が完了した後に行ってもよいが、原画像Aを入力する際に発生する断続的なデータ入力の待機時間を利用して、既に入力された一部の画素情報に基づいて、順次、各部分領域の最大値を抽出してゆくようにしてもよい。このようにすれば、最大値検索の前準備である、3次元画像における部分領域毎の最大値の抽出をより早く完了させることができ、最大値検索にすばやく移行することができる。
【0043】
なお、本実施形態においては、第1の画像空間上の原画像Aにおける立方体状の近傍8点の画素からなる各部分領域毎の画素の最大値Bを事前に抽出しているが、事前に抽出する代わりに、各検索列において、既に求められている最大値の候補値と検索点を包含する各部分領域の8近傍画素とをその都度比較し、8近傍画素値の中に最大値の候補値を超える画素値がある場合に限り、当該検索点における補間処理に進むようにしてもよい。この方法は、演算時間の点では、各部分領域毎の画素の最大値を事前に計算しておく方法より劣るが、使用メモリ量が少なくて済むため、十分なメモリ容量を確保できない場合には有効である。
【図面の簡単な説明】
【図1】本発明の一実施形態による画像処理装置の概略構成を示す図
【図2】xyzの直交座標系で表される仮想的な第1の画像空間を示す図
【図3】第1の画像空間における原画像の近傍8点の画素からなる部分領域を示す図
【図4】補間値の最大値検索の処理フローを示す図
【符号の説明】
1 画像処理装置
10 画像入力手段
20 抽出手段
30 投影方向設定手段
40 検索点設定手段
50 検索手段
60 投影画像形成手段
【発明の属する技術分野】
本発明は、画像処理に関し、特に詳しくは、3次元画像のMIP(最大値投影)処理およびMinIP(最小値投影)処理の高速化に関するものである。
【0002】
【従来の技術】
従来、CT装置、MRI装置、超音波診断装置(エコー)等で得られる3次元画像を、所望の方向に投影して投影画像を得ることが行われている。このような投影画像を得るための処理としては、投影方向について最大画素値を抽出して投影するMIP(Maximum Intensity Projection)処理や最小画素値を抽出して投影するMinIP(Minimum Intensity Projection)処理が知られている。
【0003】
上記のMIP処理やMinIP処理では、投影方向の各画素列に対して最大値や最小値を検索する必要があるが、特に、任意の方向に投影するような場合には、通常、上記最大値または最小値の検索すべき位置が3次元画像上の画素に重ならないため、3次元画像の各画素に対応する、投影方向に揃った検索点を設定し、これらの検索点において近傍画素から補間値を算出し、その補間値の最大値や最小値を検索する。そのため、任意の方向へ投影する場合には、補間値を算出するための演算量が膨大なものとなり、最大値あるいは最小値の検索にはかなりの時間を要する。そこで、これまでに、このようなMIP処理やMinIP処理における高速化の手法が、種々提案されている。
【0004】
例えば、上記演算をさせるための計算機に複数のCPUを設けて、並列処理を行わせることにより、演算に要する時間を短縮させる手法や、投影すべき方向に伸びる各画素列から、最大値あるいは最小値を有する画素を検索する際に、画素列中の一部の画素のみを検索対象画素として検索する、いわゆる間引き手法(例えば、特許文献1)などがある。
【0005】
【特許文献1】
特開2001−236492号公報
【0006】
【発明が解決しようとする課題】
しかしながら、上記の並列処理による手法では、複数のCPUが設けられた特定のハードウェアが必要になるので、汎用の計算機を手軽に用いることができず、コスト高にもつながる。また、上記の間引きによる手法では、間引いた画素(または検索点)の中に真の最大値や最小値を有する画素が存在していることもあり、常に真の最大値や最小値が検索されるわけではないので、投影画像の画質が劣化してしまうという問題があった。
【0007】
本発明は、上記問題点に鑑み、特定のハードウェアを必要とせず、また投影画像の画質を劣化させることなく、MIP処理あるいはMinIP処理の高速化が可能な画像処理方法および装置並びにそのためのプログラムを提供することを目的とするものである。
【0008】
【課題を解決するための手段】
本発明は、時間のかかる補間値の算出回数をできるだけ少なくすることにより、MIP処理またはMinIP処理の高速化を図るものである。
【0009】
本発明の画像処理方法は、一定の間隔で3次元的に配列された画素からなる3次元画像において、当該3次元画像を投影すべき任意の方向に平行な多数の列に沿って並ぶ多数の検索点を設定するステップと、投影すべき方向に沿って並ぶ検索点の各列毎に、検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、当該最大値/最小値の候補値を検索点毎に順次更新することにより検索するステップと、検索された列毎の最大値/最小値に基づいて3次元画像の投影画像を形成するステップとを有する画像処理方法において、上記検索するステップの前に、3次元画像において、各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出するステップを有し、上記検索するステップが、検索点の各々において、候補値と、検索点を包含する部分領域毎に、上記抽出するステップにおいて抽出された画素の最大値/最小値とを比較することにより、検索点において候補値が更新される可能性があるか否かを判定するステップを有し、候補値が更新される可能性があると判定されたときにのみ、検索点における補間値を算出することを特徴とする方法である。
【0010】
ここで、「最大値/最小値」とは、最大値あるいは最小値のうち、いずれか一方を意味するものであり、同一文内における当該「最大値/最小値」の表現は、一貫して、「最大値」あるいは「最小値」のどちらか一方に読み替えるものとする。
【0011】
「8近傍画素」とは、立方体の各頂点の位置に対応するような位置関係にある近傍8個の画素のことである。
【0012】
そして、「検索点において8近傍画素の線形補間により算出される補間値」とは、検索点の近傍8個の画素の各値を、その検索点と画素との距離で重み付けして線形に加算することにより得られる補間値のことである。
【0013】
上記「検索点において候補値が更新される可能性があるか否かを判定する」は、具体的には、例えば「最大値」を投影する場合、それまでに得られた最大値の候補値と、検索対象となっている検索点を包含する部分領域毎に、抽出するステップにおいて抽出された画素の最大値とを比較して、抽出された最大値が候補値より大きいときは、候補値が更新される可能性があると判定し、抽出された最大値が候補値より小さいときは、候補値が更新される可能性がないと判定する。このように判定する理由は、検索点における補間値は8近傍画素の線形補間により算出されるが、この補間は内挿補間となるため、その補間値は8近傍画素の最小値から最大値の間の値に限定されるからである。なお、「最小値」を投影する場合も、同様の考え方により、抽出された最小値が候補値より小さいときは、候補値が更新される可能性があると判定し、そうでないときは、更新される可能性がないと判定する。
【0014】
本発明の画像処理方法において、上記検索点を設定するステップは、検索点を、上記一定の間隔と略等しい間隔で設定するステップとすることが好ましい。
【0015】
また、上記検索するステップは、検索された補間値の最大値/最小値を有する検索点の位置を記憶するステップをさらに有し、既に検索された列に隣接する列において、補間値の最大値/最小値を検索する際に、既に検索された列における上記位置の近傍側から検索するステップとしてもよい。
【0016】
この場合、検索対象の列に隣接する、「既に検索された列」が、複数存在するときには、所定の方向に隣接する列を優先して採用するようにしてもよいし、ランダムに採用するようにしてもよい。
【0017】
本発明の画像処理装置は、一定の間隔で3次元的に配列された画素からなる3次元画像を入力する画像入力手段と、3次元画像を投影する任意の方向を設定する投影方向設定手段と、3次元画像において、投影する方向に平行な多数の列に沿って並ぶ多数の検索点を設定する検索点設定手段と、投影する方向に沿って並ぶ検索点の各列毎に、検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、当該最大値/最小値の候補値を検索点毎に順次更新することにより検索する検索手段と、検索された列毎の最大値/最小値に基づいて、3次元画像の投影画像を形成する投影画像形成手段とを備えた画像処理装置において、3次元画像において各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出する抽出手段をさらに備え、上記検索手段が、検索点の各々において、候補値と、検索点を包含する部分領域毎に、上記抽出手段により抽出された画素の最大値/最小値とを比較して、検索点において候補値が更新される可能性があると判定されたときにのみ、検索点における補間値を算出するものであることを特徴とするものである。
【0018】
なお、本発明の画像処理装置において、上記検索点設定手段は、検索点を、上記一定の間隔と略等しい間隔で設定するステップとすることが好ましい。
【0019】
また、上記検索手段は、検索された補間値の最大値/最小値を有する検索点の位置を記憶するものであり、既に検索された列に隣接する列において、補間値の最大値/最小値を検索する際に、既に検索された列における上記位置の近傍側から検索するものとしてもよい。
【0020】
本発明のプログラムは、一定の間隔で3次元的に配列された画素からなる3次元画像において、3次元画像を投影すべき任意の方向に平行な多数の列に沿って並ぶ多数の検索点を設定するステップと、投影すべき方向に沿って並ぶ検索点の各列毎に、検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、当該最大値/最小値の候補値を前記検索点毎に順次更新することにより検索するステップと、検索された列毎の最大値/最小値に基づいて、3次元画像の投影画像を形成するステップとを有する画像処理をコンピュータに実行させるためのプログラムにおいて、検索するステップの前に、3次元画像において、各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出するステップを有し、検索するステップが、検索点の各々において、候補値と、検索点を包含する部分領域毎に、上記抽出するステップにおいて抽出された画素の最大値/最小値とを比較することにより、検索点において候補値が更新される可能性があるか否かを判定するステップを有し、候補値が更新される可能性があると判定されたときにのみ、検索点における補間値を算出するようにしたことを特徴とするものである。
【0021】
なお、本発明において、3次元画像は医用画像であってもよく、例えば、CTスキャン装置やMRI装置、超音波診断装置(エコー)などにより撮影された画像を考えることができる。
【0022】
【発明の効果】
本発明の画像処理方法および装置によれば、演算の並列処理等の、ハードウェア構成に依存する処理は含まれておらず、また、検索対象を間引かずに全検索点を検索対象としていることから真の最大値あるいは最小値を確実に検索することができ、さらに、候補値が更新される可能性のあるときにのみ補間処理を行うことにより時間のかかる補間演算をできるだけ省略することができるので、特定のハードウェアを必要とせず、また投影画像の画質を劣化させることなく、MIP処理あるいはMinIP処理を高速化できる。
【0023】
また、本発明の画像処理方法および装置は、上述の通り、補間処理をできるだけ省略することによりMIP処理あるいはMinIP処理を高速化するものであるから、対話的処理で任意方向の投影を行う場合、すなわち、投影方向が予め決まっておらず、任意の投影方向を指定するとともに、その都度、投影画像を形成し直すようなリアルタイムな処理の場合に、特に有効である。
【0024】
なお、本発明の画像処理方法において、検索点を設定するステップを、検索点を、3次元画像を構成する画素の間隔と略等しい間隔で設定するステップとすれば、演算に要する時間と投影画像の画質とのバランスがよくなり、画質の劣化を十分に防ぎながら、高速なMIP処理あるいはMinIP処理を実現できる。
【0025】
また、検索するステップを、検索された補間値の最大値/最小値を有する検索点の位置を記憶するステップをさらに有し、既に検索された列に隣接する列において、補間値の最大値/最小値を検索する際に、既に検索された列における上記位置の近傍側から検索するステップとすれば、一般的に、上記の最大値/最小値は3次元的に連続していることが多いため、真の最大値あるいは最小値がより早い段階で検索される確率が高くなり、時間のかかる補間処理をさらに省略できる可能性があり、MIP処理あるいはMinIP処理のさらなる高速化が期待できる。
【0026】
本発明の画像処理装置において、検索点設定手段を、検索点を、3次元画像を構成する画素の間隔と略等しい間隔で設定するものとすれば、演算に要する時間と投影画像の画質とのバランスがよくなり、画質の劣化を十分に防ぎながら、高速なMIP処理あるいはMinIP処理を実現できる。
【0027】
また、検索手段を、検索された補間値の最大値/最小値を有する検索点の位置を記憶するものとし、既に検索された列に隣接する列において、補間値の最大値/最小値を検索する際に、既に検索された列における上記位置の近傍側から検索するものとすれば、一般的に、上記の最大値あるいは最小値は3次元的に連続していることが多いため、上記画像処理方法と同様に、真の最大値あるいは最小値がより早い段階で検索される確率が高くなり、時間のかかる補間処理をさらに省略できる可能性があり、MIP処理あるいはMinIP処理のさらなる高速化が期待できる。
【0028】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。図1は、本発明による画像処理装置の一実施形態の概略構成を示すブロック図である。
【0029】
図1に示す画像処理装置1は、一定の間隔で3次元的に配列された画素からなる3次元画像としての原画像Aを入力する画像入力手段10と、原画像Aにおいて各8近傍画素を頂点とする各部分領域毎に画素の最大値Bを抽出する抽出手段20と、原画像Aを投影する任意の方向(以下、投影方向という)Dを設定する投影方向設定手段30と、原画像Aにおいて、投影方向Dに平行な多数の列に沿って並ぶ多数の検索点Hを、原画像Aと等しい間隔で設定する検索点設定手段40と、投影方向Dに沿って並ぶ検索点の各列L毎に、検索点において8近傍画素の線形補間により算出される補間値の最大値Hmを、その最大値の候補値Kを検索点毎に順次更新することにより検索する検索手段50と、検索された列L毎の最大値Hmに基づいて、3次元画像の投影画像A′を形成する投影画像形成手段60とを備えている。
【0030】
検索手段50は、検索点Hの各々において、候補値Kと検索点Hを包含する部分領域に対応する上記抽出された値とを比較して、その検索点Hにおいて候補値Kが更新される可能性があると判定されたときにのみ、検索点Hにおける補間値Hを算出するとともに、この算出された補間値Hが候補値Kとしてより適しているときに、この補間値Hを候補値Kとして更新する。
【0031】
次に、本画像処理装置1の作用について説明する。
【0032】
画像入力手段10は、MRI装置やCT装置などの画像取得手段によって取得された、被写体の3次元画像である原画像Aを入力し、図2に示すような、xyzの直交座標系で表される仮想的な第1の画像空間に記憶させる。
【0033】
抽出手段20は、第1の画像空間上の原画像Aにおいて、図2に示すような、立方体状の近傍8点の画素からなる各部分領域毎の画素の最大値Bを抽出し、抽出された各最大値Bを、各部分領域を代表する所定の画素の座標位置に対応させて、xyzの直交座標系で表される仮想的な第2の画像空間に記憶させる。図3は、上記部分領域の拡大図を示している。具体的には、第1の画像空間上の座標(i,j,k)における画素の値をA(i,j,k)、第2の画像空間上の座標(i,j,k)における画素の値をB(i,j,k)として、下式(1)のように対応させる。
【0034】
【数1】
【0035】
検索手段50は、投影方向に並ぶ検索点の各列L毎に、検索点Hにおける8個の近傍画素の線形補間により算出される補間値の最大値Hmを、各検索点H毎にその最大値の候補値Kを順次更新することにより検索してゆく。この最大値検索は、図4に示すようなフローに従って行われる。
【0036】
まず、第1の画像空間において、最大値を検索する検索点の列Lを指定する(ステップS1)。指定された列Lのいずれか一方の端の検索点Hを指定し(ステップS2)、指定された検索点Hにおける補間値Hを算出して、この算出された値を最大値の初期の候補値Kとして設定する(ステップS3)。指定された列に沿って次の検索点Hを指定する(ステップS4)。この検索点Hの座標に基づいて、この検索点Hの8近傍画素における最大値Bを、第2の画像空間から読出し(ステップS5)、読み出された最大値Bが候補値Kより大きいか否かを判定する(ステップS6)。座標位置(i+α,j+β,k+γ),0≦α,β,γ<1 の検索点における補間値は、A(i,j,k),A(i+1,j,k),A(i,j+1,k),A(i+1,j+1,k),A(i,j,k+1),A(i+1,j,k+1),A(i,j+1,k+1),A(i+1,j+1,k+1)の8近傍画素の線形補間により求まるが(図3参照)、内挿補間となるため、補間値は8近傍画素の最小値から最大値の間の値になる。したがって、読み出された最大値Bが候補値Kより大きいときは、その検索点Hにおいて、候補値Kが更新される可能性があるので、この場合は、その検索点Hの8近傍画素に基づいて補間演算を行い、補間値Hを算出する(ステップS7)。一方、ステップS6において、読み出された最大値Bが候補値Kより小さいときは、その検索点Hにおいて、候補値Kが更新される可能性はないので、ステップS10に移行する。そして、ステップS7において算出された補間値Hが候補値Kより大きいか否かを判定し(ステップS8)、補間値Hが候補値Kより大きいときは、この補間値Hを候補値Kとして更新し(ステップS9)、補間値Hが候補値Kより小さいときは、ステップS10に移行する。そして、ステップS9の後、指定されている検索点Hが、指定された列Lの最後であるか否かを判定し(ステップS10)、最後であれば、この時の候補値Kを指定された列Lにおける補間値の最大値Hmとして決定し(ステップS11)、最後でなければ、ステップS4に移行する。ステップS11の後、指定されている列Lが最後の列であるか否かを判定し(ステップS12)、最後であれば、最大値検索を終了し、最後でなければ、ステップS1に移行する。
【0037】
投影画像形成手段60は、上記のようにして得られた各列L毎の補間値の最大値Hmに基づいて、原画像Aを投影方向Dに最大値投影した投影画像A′を形成する。
【0038】
このような、本画像処理装置1によれば、演算の並列処理等のハードウェア構成に依存する処理は含まれておらず、また、検索対象を間引かずに全検索点を検索対象としていることから真の最大値を確実に検索することができ、さらに、候補値が更新される可能性のあるときにのみ補間処理を行うことにより時間のかかる補間演算をできるだけ省略することができるので、特定のハードウェアを必要とせず、また投影画像の画質を劣化させることなく、MIP処理あるいはMinIP処理を高速化できる。
【0039】
また、本画像処理装置1は、上述の通り、補間処理をできるだけ省略することによりMIP処理を高速化するものであるから、対話的処理で任意方向の投影を行う場合、すなわち、投影方向が予め決まっておらず、任意の投影方向を指定するとともにその都度投影画像を形成し直すような、補間処理がリアルタイムで頻繁に行われるような場合に、特に有効である。
【0040】
なお、本画像処理装置1において、検索手段50を、検索された補間値の最大値を有する検索点の位置を記憶するものとし、既に検索された列に隣接する列において、補間値の最大値を検索する際に、既に検索された列における上記位置の近傍側から検索するものとすれば、一般的に、上記の最大値は3次元的に連続していることが多いため、真の最大値がより早い段階で検索される確率が高くなり、時間のかかる補間処理をさらに省略できる可能性があり、MIP処理のさらなる高速化が期待できる。
【0041】
なお、本実施形態においては、補間値の最大値投影を行うMIP処理を例に記述したが、補間値の最小値投影を行うMinIP処理においても同様に、適用可能である。
【0042】
また、抽出手段20による各部分領域毎の画素の最大値の抽出は、画像入力手段10による原画像Aの入力が完了した後に行ってもよいが、原画像Aを入力する際に発生する断続的なデータ入力の待機時間を利用して、既に入力された一部の画素情報に基づいて、順次、各部分領域の最大値を抽出してゆくようにしてもよい。このようにすれば、最大値検索の前準備である、3次元画像における部分領域毎の最大値の抽出をより早く完了させることができ、最大値検索にすばやく移行することができる。
【0043】
なお、本実施形態においては、第1の画像空間上の原画像Aにおける立方体状の近傍8点の画素からなる各部分領域毎の画素の最大値Bを事前に抽出しているが、事前に抽出する代わりに、各検索列において、既に求められている最大値の候補値と検索点を包含する各部分領域の8近傍画素とをその都度比較し、8近傍画素値の中に最大値の候補値を超える画素値がある場合に限り、当該検索点における補間処理に進むようにしてもよい。この方法は、演算時間の点では、各部分領域毎の画素の最大値を事前に計算しておく方法より劣るが、使用メモリ量が少なくて済むため、十分なメモリ容量を確保できない場合には有効である。
【図面の簡単な説明】
【図1】本発明の一実施形態による画像処理装置の概略構成を示す図
【図2】xyzの直交座標系で表される仮想的な第1の画像空間を示す図
【図3】第1の画像空間における原画像の近傍8点の画素からなる部分領域を示す図
【図4】補間値の最大値検索の処理フローを示す図
【符号の説明】
1 画像処理装置
10 画像入力手段
20 抽出手段
30 投影方向設定手段
40 検索点設定手段
50 検索手段
60 投影画像形成手段
Claims (9)
- 一定の間隔で3次元的に配列された画素からなる3次元画像において、該3次元画像を投影すべき任意の方向に平行な多数の列に沿って並ぶ多数の検索点を設定するステップと、
前記投影すべき方向に沿って並ぶ前記検索点の各列毎に、前記検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、該最大値/最小値の候補値を前記検索点毎に順次更新することにより検索するステップと、検索された前記列毎の前記最大値/最小値に基づいて、前記3次元画像の投影画像を形成するステップとを有する画像処理方法において、
前記検索するステップの前に、
前記3次元画像において、各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出するステップを有し、
前記検索するステップが、前記検索点の各々において、
前記候補値と、前記検索点を包含する前記部分領域毎に、前記抽出するステップにおいて抽出された前記画素の最大値/最小値とを比較することにより、該検索点において前記候補値が更新される可能性があるか否かを判定するステップを有し、
前記候補値が更新される可能性があると判定されたときにのみ、前記検索点における前記補間値を算出することを特徴とする画像処理方法。 - 前記検索点を設定するステップが、前記検索点を前記一定の間隔と略等しい間隔で設定するステップであることを特徴とする請求項1記載の画像処理方法。
- 前記検索するステップが、検索された前記補間値の最大値/最小値を有する検索点の位置を記憶するステップをさらに有し、
既に検索された前記列に隣接する列において、前記補間値の最大値/最小値を検索する際に、既に検索された前記列における前記位置の近傍側から検索するステップであることを特徴とする請求項1または2記載の画像処理方法。 - 前記3次元画像が、医用画像であることを特徴とする請求項1、2または3記載の画像処理方法。
- 一定の間隔で3次元的に配列された画素からなる3次元画像を入力する画像入力手段と、
前記3次元画像を投影する任意の方向を設定する投影方向設定手段と、
前記3次元画像において、前記投影する方向に平行な多数の列に沿って並ぶ多数の検索点を設定する検索点設定手段と、
前記投影する方向に沿って並ぶ前記検索点の各列毎に、前記検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、該最大値/最小値の候補値を前記検索点毎に順次更新することにより検索する検索手段と、
検索された前記列毎の前記最大値/最小値に基づいて、前記3次元画像の投影画像を形成する投影画像形成手段とを備えた画像処理装置において、
前記3次元画像において各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出する抽出手段をさらに備え、
前記検索手段が、
前記検索点の各々において、前記候補値と、前記検索点を包含する前記部分領域毎に、前記抽出手段により抽出された前記画素の最大値/最小値とを比較して、該検索点において前記候補値が更新される可能性があると判定されたときにのみ、前記検索点における前記補間値を算出するものであることを特徴とする画像処理装置。 - 前記検索点設定手段が、前記検索点を前記一定の間隔と略等しい間隔で設定するものであることを特徴とする請求項5記載の画像処理装置。
- 前記検索手段が、検索された前記補間値の最大値/最小値を有する検索点の位置を記憶するものであり、
既に検索された前記列に隣接する列において、前記補間値の最大値/最小値を検索する際に、既に検索された前記列における前記位置の近傍側から検索するものであることを特徴とする請求項5または6記載の画像処理装置。 - 前記3次元画像が、医用画像であることを特徴とする請求項または5、6または7記載の画像処理装置。
- 一定の間隔で3次元的に配列された画素からなる3次元画像において、該3次元画像を投影すべき任意の方向に平行な多数の列に沿って並ぶ多数の検索点を設定するステップと、
前記投影すべき方向に沿って並ぶ前記検索点の各列毎に、前記検索点において8近傍画素の線形補間により算出される補間値の最大値/最小値を、該最大値/最小値の候補値を前記検索点毎に順次更新することにより検索するステップと、検索された前記列毎の前記最大値/最小値に基づいて、前記3次元画像の投影画像を形成するステップとを有する画像処理をコンピュータに実行させるためのプログラムにおいて、
前記検索するステップの前に、
前記3次元画像において、各8近傍画素を頂点とする各部分領域毎に画素の最大値/最小値を抽出するステップを有し、
前記検索するステップが、前記検索点の各々において、
前記候補値と、前記検索点を包含する前記部分領域毎に、前記抽出するステップにおいて抽出された前記画素の最大値/最小値とを比較することにより、該検索点において前記候補値が更新される可能性があるか否かを判定するステップを有し、
前記候補値が更新される可能性があると判定されたときにのみ、前記検索点における前記補間値を算出するようにしたことを特徴とする画像処理をコンピュータに実行させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003157878A JP2004362120A (ja) | 2003-06-03 | 2003-06-03 | 画像処理方法および装置並びにプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003157878A JP2004362120A (ja) | 2003-06-03 | 2003-06-03 | 画像処理方法および装置並びにプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004362120A true JP2004362120A (ja) | 2004-12-24 |
Family
ID=34051463
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003157878A Withdrawn JP2004362120A (ja) | 2003-06-03 | 2003-06-03 | 画像処理方法および装置並びにプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004362120A (ja) |
-
2003
- 2003-06-03 JP JP2003157878A patent/JP2004362120A/ja not_active Withdrawn
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210232924A1 (en) | Method for training smpl parameter prediction model, computer device, and storage medium | |
| US6801653B1 (en) | Information processing apparatus and method as well as medium | |
| US5577175A (en) | 3-dimensional animation generating apparatus and a method for generating a 3-dimensional animation | |
| JP4542591B2 (ja) | 画像処理システム、画像保管装置、および、画像処理装置、並びに、画像処理方法、プログラム | |
| KR102450931B1 (ko) | 이미지 정합 방법 및 연관된 모델 훈련 방법, 기기, 장치 | |
| US8018460B2 (en) | Vector graphics shape data generation apparatus, rendering apparatus, method, and program | |
| EP2889830A1 (en) | Image enlargement method and apparatus | |
| CN101341514A (zh) | 基于点的自适应弹性图像配准 | |
| CN108648145B (zh) | 图像拼接方法及装置 | |
| KR20150107594A (ko) | 화상 처리 장치 및 영역 분할 방법 | |
| US20220405878A1 (en) | Image processing apparatus, image processing method, and image processing program | |
| JP4524514B2 (ja) | 画像処理装置、画像処理方法、および記録媒体 | |
| CN116977352A (zh) | 斑块分割方法、装置和计算机可读存储介质 | |
| JP2003016427A (ja) | ステレオ画像の視差推定方法 | |
| EP3185208A1 (en) | Method for determining missing values in a depth map, corresponding device, computer program product and non-transitory computer-readable carrier medium | |
| JP2002092590A (ja) | 画像表示装置 | |
| CN114185429B (zh) | 手势关键点定位或姿态估计的方法、电子装置和存储介质 | |
| CN113658106B (zh) | 一种基于腹部增强ct的肝脏病灶自动诊断系统 | |
| JP4379706B2 (ja) | 領域抽出方法 | |
| JP2020075063A (ja) | 画像補間・臓器抽出装置およびそのプログラム | |
| JP2004362120A (ja) | 画像処理方法および装置並びにプログラム | |
| JP4887491B2 (ja) | 医用画像処理方法及びその装置、プログラム | |
| JP3910811B2 (ja) | テクスチャマッピング方法、テクスチャマッピング処理プログラム及びそのプログラムを記録したコンピュータ読取り可能な記録媒体 | |
| JP6116271B2 (ja) | 特徴量算出装置、方法及びプログラム | |
| JP2007328747A (ja) | 特徴点探索装置、画像解析装置、および最近傍特徴点検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20060905 |