JP2004359059A - 可変ピッチプロペラ船の推進制御装置 - Google Patents
可変ピッチプロペラ船の推進制御装置 Download PDFInfo
- Publication number
- JP2004359059A JP2004359059A JP2003158561A JP2003158561A JP2004359059A JP 2004359059 A JP2004359059 A JP 2004359059A JP 2003158561 A JP2003158561 A JP 2003158561A JP 2003158561 A JP2003158561 A JP 2003158561A JP 2004359059 A JP2004359059 A JP 2004359059A
- Authority
- JP
- Japan
- Prior art keywords
- blade angle
- control
- variable pitch
- pitch propeller
- spindle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H3/00—Propeller-blade pitch changing
- B63H3/10—Propeller-blade pitch changing characterised by having pitch control conjoint with propulsion plant control
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
【課題】本発明の目的は、CPP翼角が小さい場合、特に最小値付近にある場合であっても主軸回転数の安定性を損なうことのない可変ピッチプロペラ船の推進制御装置を提供する。
【解決手段】翼角検出器により可変ピッチプロペラの翼角(CPP翼角)を検出し、CPP翼角が最小値付近にあるときは制御信号信号出力手段の制御ゲインを、CPP翼角が最大値のときの制御ゲインよりも小さく設定する。
【選択図】 図1
【解決手段】翼角検出器により可変ピッチプロペラの翼角(CPP翼角)を検出し、CPP翼角が最小値付近にあるときは制御信号信号出力手段の制御ゲインを、CPP翼角が最大値のときの制御ゲインよりも小さく設定する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、可変ピッチプロペラ船の推進制御装置に関し、さらに詳しくは、可変ピッチプロペラの翼角が最小値付近となるときでも、主軸回転数の安定性を損なうことのない可変ピッチプロペラの推進制御装置に関する。
【0002】
【従来の技術】
例えば、曳船において、プロペラが単独航海に際して最高の速力を得られるように設計されていると、曳航状態においてはピッチ比が大きすぎて回転数が低下し、機関出力を有効に利用できない。反対に曳航状態に適したプロペラにすると、単独航海の場合に回転数をフルにしてもピッチ比が小さすぎて十分な出力を得ることができず、速力を得ることができない。これはピッチを固定して使用していることからくる制約である。そこで、このような問題に対処するためにプロペラの荷重度に応じてピッチを加減できる可変ピッチプロペラが採用されており、特にガスタービン船では、その性質上、エンジンを停止することができないことから、ピッチ角をゼロにしてアイドリング状態を保持する必要があるため、可変ピッチプロペラの必要性が大きい。
【0003】
図3は、従来の可変ピッチプロペラ船の推進制御装置の全体構成を示すものである。図3において、21は主機、22は主機21に接続される主軸、23は主機により主軸を介して回転駆動される可変ピッチプロペラ(CPP)、24aはCPPの翼角制御信号を出力する翼角信号出力器、24bは翼角信号出力器24aからの信号を受けてCPP翼角を調節する変節装置、26は主軸の目標回転数を設定する主軸回転数設定器、27は主軸の回転数を検出する主軸回転数検出器、28は主軸回転数設定器26により設定された目標回転数と主軸回転数検出器27により検出された主軸回転数との偏差に所定の制御ゲインを与えて主軸回転数を制御するための制御信号を出力する制御信号出力器、29は制御信号出力器からの信号を受けて主機21への燃料供給量を制御する主機燃料制御装置、30は操縦レバーである。
【0004】
この推進装置では、操縦レバー30を操作することにより、操縦レバー30の位置に対応して翼角信号出力器24aにより翼角信号が出力され、この出力信号を変節装置24bで受けてCPP翼角を制御している。また、操縦レバー30を操作することにより、操縦レバー30の位置に対応した主軸の目標回転数が主軸回転数設定器26により設定されるとともに主軸回転数検出器27により主軸回転数が検出され、この目標回転数と主軸回転数が制御信号出力器28に入力される。制御信号出力器では、目標回転数と主軸回転数との偏差に予め設定された所定の制御ゲインを与えて主軸回転数制御信号を出力する。この信号は主機燃料制御装置29に送られ、これにより主機21への燃料供給量が制御され主軸回転数が制御される。このように、従来の推進制御装置では、主軸回転数の制御と、これと独立したCPP翼角の制御により推進制御が行われていた。なお、上述した可変ピッチプロペラ船の推進制御に関する技術については、下記特許文献1及び特許文献2等に開示されている。
【0005】
【特許文献1】
特開平8−239093号公報
【特許文献2】
特開昭54−120195号公報
【0006】
【発明が解決しようとする課題】
上述したような従来の推進制御装置では主軸回転数制御用のゲインがCPP翼角とは独立して設定されていた。すなわち、CPP翼角が最大値付近での制御安定性を優先して、制御ゲインを大きく設定し、かつ、この制御ゲインを一定値に固定していた。ところが、CPP翼角が変化すると、主軸回転数の回転速度を上昇、下降させるのに必要な主機の出力増減割合が大きく変化する。例えば、CPP翼角が最小値付近では100〜200馬力の出力上昇で主軸回転数が5〜10rpm程度上昇するのに対し、CPP角度が最大値付近では1000〜2000馬力の出力上昇で1rpm程度しか上昇しない。したがって、CPP翼角が大きいときには、これに適合させて制御ゲインを大きく設定しているので問題は生じないが、逆にCPP翼角が小さいときには、制御ゲインが大きく設定されているため、制御信号出力器28からの出力信号が大きすぎ、主機の出力応答が過剰になってしまう。このため、主軸回転数が目標値前後でオーバーシュートとアンダーシュートを繰り返すことによる周期的変動(ハンチング)を起こしてしまい、主軸回転数の安定性が損なわれるという問題があった。
【0007】
本発明は上述した問題点を解決するために創案されたものである。すなわち、本発明の目的は、CPP翼角が小さい場合、特に最小値付近にある場合であっても主軸回転数の安定性を損なうことのない可変ピッチプロペラ船の推進制御装置を提供することにある。
【0008】
【課題を解決するための手段】
上記目的を達成するため、本発明によれば、可変ピッチプロペラの翼角を制御する翼角制御手段と、主軸の目標回転数を設定する主軸回転数設定手段と、主軸の回転数を検出する主軸回転数検出手段と、前記主軸回転数設定手段と該主軸回転数検出手段により検出された主軸回転数との偏差に所定の制御ゲインを与えて前記主軸回転数を制御するための制御信号を出力する制御信号出力手段と、該制御信号出力手段からの信号を受けて主機への燃料供給量を制御する主機燃料供給制御手段とを備える可変ピッチプロペラ船の推進制御装置であって、前記翼角制御手段は前記可変ピッチプロペラの翼角を検出する翼角検出手段を備え、前記制御信号出力手段は、前記翼角検出手段からの出力信号を受け、検出された翼角が最小値付近のときに、翼角が最大値のときの制御ゲインよりも小さい制御ゲインを設定する、ことを特徴とする可変ピッチプロペラ船の推進制御装置が提供される。
【0009】
上記本発明の構成によれば、翼角検出手段により翼角を検出し、制御信号出力手段により、検出された翼角が最小値付近のときに、翼角が最大値のときの制御ゲインよりも十分小さい制御ゲインを設定するので、出力信号が最小値付近の翼角に適合したものとなり、主機燃料制御装置による主機への燃料供給量も最小値付近の翼角に適合する。これにより、翼角が最小値付近のときでも主機の出力応答が過剰にならず、主軸回転数のオーバーシュート・アンダーシュートによる周期的変動(ハンチング)を抑制することができる。したがって、翼角が最小値付近にあるときの主軸回転数をその安定性を損なうことなく制御することが可能となる。
【0010】
また、前記制御信号出力手段は、翼角が最小値付近から最大値までの間で各翼角に対応して増大する制御ゲインを設定することが好ましい。
【0011】
このように制御ゲインを各翼各に対応して個別に設定することにより、翼角が最小値付近にある場合のみならず、翼角全域にわたって、主軸回転数をその安定性を損なうことなく制御することができる。
【0012】
【発明の実施の形態】
以下、本発明の好適な実施の形態を添付図面に基づいて詳細に説明する。
【0013】
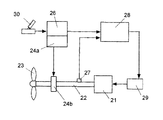
図1は、本発明の可変ピッチプロペラ船の推進制御装置の全体構成を示す図である。図1において、1は主機、2は主機1に接続される主軸、3は、主機により主軸を介して回転駆動される可変ピッチプロペラ(CPP)、4aはCPPの翼角制御信号を出力する翼角信号出力器、4bは翼角信号出力器4からの信号を受けてCPP翼角を調整する変節装置、4cはCPP翼角を検出する翼角検出器、6は主軸の目標回転数を設定する主軸回転数設定器、7は主軸の回転数を検出する主軸回転数検出器、8は主軸回転数設定器6により設定された目標回転数と主軸回転数検出器7により検出された主軸回転数との偏差に所定の制御ゲインを与えて主軸回転数を制御するための制御信号を出力する制御信号出力器、9は制御信号出力器からの信号を受けて主機1への燃料供給量を制御する主機燃料制御装置、10は操縦レバーである。なお、上記構成において、翼角信号出力器4aと変節装置4bと翼角検出器4cとにより翼角制御手段4を構成している。また操縦レバー10は、操縦パネル等の押しボタン式のものであってもよい。
【0014】
翼角検出器4cは、変節装置4bに設置され、変節装置4bのサーボシリンダ内のピストン(図示せず。)の位置をポテンショメータにより検出することによりCPP翼角を検出するようになっている。
【0015】
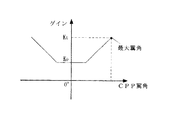
制御信号出力器8は、前記翼角検出器4cにより検出された翼角値に応じて予め設定されたスケジュールに基づいて制御ゲインを算出・設定するようになっている。図2は制御信号出力器8におけるゲイン設定のスケジュールを示すものであり、横軸にCPP翼角をとり、縦軸に制御ゲインとったものである。この図に示すように、CPP翼角が最大のときの制御ゲインはK1に設定され、CPP翼角が最小値(0°)付近の制御ゲインはK1より小さいK0に設定されるようになっている。また、制御ゲインは翼角が最小値付近から最大値までの間で各翼角に対応して増大するように設定される。
【0016】
次に本発明の可変ピッチプロペラ船の推進制御装置による制御について説明する。操縦者が操縦レバー10を操作すると、操縦レバー10の位置に対応して翼角信号出力器4aにより翼角信号が出力され、変節装置4bによりこの信号を受けてCPP翼角が制御される。また、主軸回転数設定器6により主軸の目標回転数が設定され、主軸回転数検出器7により主軸回転数が検出され、翼角検出器4cによりCPP翼角が検出され、これら目標回転数、主軸回転数、CPP翼角が制御信号出力器8に入力される。制御信号出力器8では、目標回転数と主軸回転数との偏差に上記スケジュールに基づいて算出された制御ゲインを与えて主軸回転数制御信号を出力する。この信号は主機燃料制御装置11に送られ、これにより主機1への燃料供給が制御され主軸回転数が制御される。
【0017】
このとき、制御信号出力器8では上述したスケジュールに基づいて制御ゲインが設定されるので、CPP翼角が最小値付近にあるときには制御ゲインは十分小さく設定される。これにより主機への燃料供給量を十分少なくするので、主機の出力応答が過剰にならない。したがって、CPP翼角が小さいときでも主軸回転数のオーバーシュート・アンダーシュートを少なくして主軸回転数の周期的変動(ハンチング)を抑制することができ、主軸回転数をその安定性を損なうことなく制御することが可能となる。しかも、制御ゲインは翼角が最小値付近から最大値までの間で各翼角に対応して増大するように設定されるので、CPP翼角が最小値付近にある場合のみならず、CPP翼角全域にわたって、主軸回転数をその安定性を損なうことなく制御することができる
【0018】
なお、本発明は上述した実施形態に限定される本発明の要旨を逸脱しない範囲で種々変更し得ることは勿論である。
【0019】
【発明の効果】
以上説明したように、本発明によれば、以下のような優れた効果を享受できる。
(1)CPP翼角が小さいときに、主軸回転数制御ゲインを小さく設定するようにしたので、主機に与える出力信号がCPP翼角が最大の場合よりも小さくなることにより、プロペラ翼角が小さいときでも主軸回転数のオーバーシュート・アンダーシュートを少なくして主軸回転数の周期的変動(ハンチング)を抑制することができ、これにより、主軸回転数をその安定性を損なうことなく制御することが可能となる。
(2)制御信号出力手段の制御ゲインは、翼角が最小値付近から最大値までの間で各翼角に対応して増大するように設定されるので、CPP翼角が最小値付近にある場合のみならず、CPP翼角全域にわたって、主軸回転数をその安定性を損なうことなく制御することができる。
【図面の簡単な説明】
【図1】本発明の可変ピッチプロペラ船の推進制御装置である。
【図2】制御信号出力器におけるゲイン設定のスケジュールを示す図である。
【図3】従来の可変ピッチプロペラ船の推進制御装置である。
【符号の説明】
1 主機
2 主軸
3 可変ピッチプロペラ
4 翼角制御手段
4a 翼角信号出力器
4b 変節装置
4c 翼角検出器
6 主軸回転数設定器
7 主軸回転数検出器
8 制御信号出力器
9 主機燃料制御装置
10 操縦レバー
【発明の属する技術分野】
本発明は、可変ピッチプロペラ船の推進制御装置に関し、さらに詳しくは、可変ピッチプロペラの翼角が最小値付近となるときでも、主軸回転数の安定性を損なうことのない可変ピッチプロペラの推進制御装置に関する。
【0002】
【従来の技術】
例えば、曳船において、プロペラが単独航海に際して最高の速力を得られるように設計されていると、曳航状態においてはピッチ比が大きすぎて回転数が低下し、機関出力を有効に利用できない。反対に曳航状態に適したプロペラにすると、単独航海の場合に回転数をフルにしてもピッチ比が小さすぎて十分な出力を得ることができず、速力を得ることができない。これはピッチを固定して使用していることからくる制約である。そこで、このような問題に対処するためにプロペラの荷重度に応じてピッチを加減できる可変ピッチプロペラが採用されており、特にガスタービン船では、その性質上、エンジンを停止することができないことから、ピッチ角をゼロにしてアイドリング状態を保持する必要があるため、可変ピッチプロペラの必要性が大きい。
【0003】
図3は、従来の可変ピッチプロペラ船の推進制御装置の全体構成を示すものである。図3において、21は主機、22は主機21に接続される主軸、23は主機により主軸を介して回転駆動される可変ピッチプロペラ(CPP)、24aはCPPの翼角制御信号を出力する翼角信号出力器、24bは翼角信号出力器24aからの信号を受けてCPP翼角を調節する変節装置、26は主軸の目標回転数を設定する主軸回転数設定器、27は主軸の回転数を検出する主軸回転数検出器、28は主軸回転数設定器26により設定された目標回転数と主軸回転数検出器27により検出された主軸回転数との偏差に所定の制御ゲインを与えて主軸回転数を制御するための制御信号を出力する制御信号出力器、29は制御信号出力器からの信号を受けて主機21への燃料供給量を制御する主機燃料制御装置、30は操縦レバーである。
【0004】
この推進装置では、操縦レバー30を操作することにより、操縦レバー30の位置に対応して翼角信号出力器24aにより翼角信号が出力され、この出力信号を変節装置24bで受けてCPP翼角を制御している。また、操縦レバー30を操作することにより、操縦レバー30の位置に対応した主軸の目標回転数が主軸回転数設定器26により設定されるとともに主軸回転数検出器27により主軸回転数が検出され、この目標回転数と主軸回転数が制御信号出力器28に入力される。制御信号出力器では、目標回転数と主軸回転数との偏差に予め設定された所定の制御ゲインを与えて主軸回転数制御信号を出力する。この信号は主機燃料制御装置29に送られ、これにより主機21への燃料供給量が制御され主軸回転数が制御される。このように、従来の推進制御装置では、主軸回転数の制御と、これと独立したCPP翼角の制御により推進制御が行われていた。なお、上述した可変ピッチプロペラ船の推進制御に関する技術については、下記特許文献1及び特許文献2等に開示されている。
【0005】
【特許文献1】
特開平8−239093号公報
【特許文献2】
特開昭54−120195号公報
【0006】
【発明が解決しようとする課題】
上述したような従来の推進制御装置では主軸回転数制御用のゲインがCPP翼角とは独立して設定されていた。すなわち、CPP翼角が最大値付近での制御安定性を優先して、制御ゲインを大きく設定し、かつ、この制御ゲインを一定値に固定していた。ところが、CPP翼角が変化すると、主軸回転数の回転速度を上昇、下降させるのに必要な主機の出力増減割合が大きく変化する。例えば、CPP翼角が最小値付近では100〜200馬力の出力上昇で主軸回転数が5〜10rpm程度上昇するのに対し、CPP角度が最大値付近では1000〜2000馬力の出力上昇で1rpm程度しか上昇しない。したがって、CPP翼角が大きいときには、これに適合させて制御ゲインを大きく設定しているので問題は生じないが、逆にCPP翼角が小さいときには、制御ゲインが大きく設定されているため、制御信号出力器28からの出力信号が大きすぎ、主機の出力応答が過剰になってしまう。このため、主軸回転数が目標値前後でオーバーシュートとアンダーシュートを繰り返すことによる周期的変動(ハンチング)を起こしてしまい、主軸回転数の安定性が損なわれるという問題があった。
【0007】
本発明は上述した問題点を解決するために創案されたものである。すなわち、本発明の目的は、CPP翼角が小さい場合、特に最小値付近にある場合であっても主軸回転数の安定性を損なうことのない可変ピッチプロペラ船の推進制御装置を提供することにある。
【0008】
【課題を解決するための手段】
上記目的を達成するため、本発明によれば、可変ピッチプロペラの翼角を制御する翼角制御手段と、主軸の目標回転数を設定する主軸回転数設定手段と、主軸の回転数を検出する主軸回転数検出手段と、前記主軸回転数設定手段と該主軸回転数検出手段により検出された主軸回転数との偏差に所定の制御ゲインを与えて前記主軸回転数を制御するための制御信号を出力する制御信号出力手段と、該制御信号出力手段からの信号を受けて主機への燃料供給量を制御する主機燃料供給制御手段とを備える可変ピッチプロペラ船の推進制御装置であって、前記翼角制御手段は前記可変ピッチプロペラの翼角を検出する翼角検出手段を備え、前記制御信号出力手段は、前記翼角検出手段からの出力信号を受け、検出された翼角が最小値付近のときに、翼角が最大値のときの制御ゲインよりも小さい制御ゲインを設定する、ことを特徴とする可変ピッチプロペラ船の推進制御装置が提供される。
【0009】
上記本発明の構成によれば、翼角検出手段により翼角を検出し、制御信号出力手段により、検出された翼角が最小値付近のときに、翼角が最大値のときの制御ゲインよりも十分小さい制御ゲインを設定するので、出力信号が最小値付近の翼角に適合したものとなり、主機燃料制御装置による主機への燃料供給量も最小値付近の翼角に適合する。これにより、翼角が最小値付近のときでも主機の出力応答が過剰にならず、主軸回転数のオーバーシュート・アンダーシュートによる周期的変動(ハンチング)を抑制することができる。したがって、翼角が最小値付近にあるときの主軸回転数をその安定性を損なうことなく制御することが可能となる。
【0010】
また、前記制御信号出力手段は、翼角が最小値付近から最大値までの間で各翼角に対応して増大する制御ゲインを設定することが好ましい。
【0011】
このように制御ゲインを各翼各に対応して個別に設定することにより、翼角が最小値付近にある場合のみならず、翼角全域にわたって、主軸回転数をその安定性を損なうことなく制御することができる。
【0012】
【発明の実施の形態】
以下、本発明の好適な実施の形態を添付図面に基づいて詳細に説明する。
【0013】
図1は、本発明の可変ピッチプロペラ船の推進制御装置の全体構成を示す図である。図1において、1は主機、2は主機1に接続される主軸、3は、主機により主軸を介して回転駆動される可変ピッチプロペラ(CPP)、4aはCPPの翼角制御信号を出力する翼角信号出力器、4bは翼角信号出力器4からの信号を受けてCPP翼角を調整する変節装置、4cはCPP翼角を検出する翼角検出器、6は主軸の目標回転数を設定する主軸回転数設定器、7は主軸の回転数を検出する主軸回転数検出器、8は主軸回転数設定器6により設定された目標回転数と主軸回転数検出器7により検出された主軸回転数との偏差に所定の制御ゲインを与えて主軸回転数を制御するための制御信号を出力する制御信号出力器、9は制御信号出力器からの信号を受けて主機1への燃料供給量を制御する主機燃料制御装置、10は操縦レバーである。なお、上記構成において、翼角信号出力器4aと変節装置4bと翼角検出器4cとにより翼角制御手段4を構成している。また操縦レバー10は、操縦パネル等の押しボタン式のものであってもよい。
【0014】
翼角検出器4cは、変節装置4bに設置され、変節装置4bのサーボシリンダ内のピストン(図示せず。)の位置をポテンショメータにより検出することによりCPP翼角を検出するようになっている。
【0015】
制御信号出力器8は、前記翼角検出器4cにより検出された翼角値に応じて予め設定されたスケジュールに基づいて制御ゲインを算出・設定するようになっている。図2は制御信号出力器8におけるゲイン設定のスケジュールを示すものであり、横軸にCPP翼角をとり、縦軸に制御ゲインとったものである。この図に示すように、CPP翼角が最大のときの制御ゲインはK1に設定され、CPP翼角が最小値(0°)付近の制御ゲインはK1より小さいK0に設定されるようになっている。また、制御ゲインは翼角が最小値付近から最大値までの間で各翼角に対応して増大するように設定される。
【0016】
次に本発明の可変ピッチプロペラ船の推進制御装置による制御について説明する。操縦者が操縦レバー10を操作すると、操縦レバー10の位置に対応して翼角信号出力器4aにより翼角信号が出力され、変節装置4bによりこの信号を受けてCPP翼角が制御される。また、主軸回転数設定器6により主軸の目標回転数が設定され、主軸回転数検出器7により主軸回転数が検出され、翼角検出器4cによりCPP翼角が検出され、これら目標回転数、主軸回転数、CPP翼角が制御信号出力器8に入力される。制御信号出力器8では、目標回転数と主軸回転数との偏差に上記スケジュールに基づいて算出された制御ゲインを与えて主軸回転数制御信号を出力する。この信号は主機燃料制御装置11に送られ、これにより主機1への燃料供給が制御され主軸回転数が制御される。
【0017】
このとき、制御信号出力器8では上述したスケジュールに基づいて制御ゲインが設定されるので、CPP翼角が最小値付近にあるときには制御ゲインは十分小さく設定される。これにより主機への燃料供給量を十分少なくするので、主機の出力応答が過剰にならない。したがって、CPP翼角が小さいときでも主軸回転数のオーバーシュート・アンダーシュートを少なくして主軸回転数の周期的変動(ハンチング)を抑制することができ、主軸回転数をその安定性を損なうことなく制御することが可能となる。しかも、制御ゲインは翼角が最小値付近から最大値までの間で各翼角に対応して増大するように設定されるので、CPP翼角が最小値付近にある場合のみならず、CPP翼角全域にわたって、主軸回転数をその安定性を損なうことなく制御することができる
【0018】
なお、本発明は上述した実施形態に限定される本発明の要旨を逸脱しない範囲で種々変更し得ることは勿論である。
【0019】
【発明の効果】
以上説明したように、本発明によれば、以下のような優れた効果を享受できる。
(1)CPP翼角が小さいときに、主軸回転数制御ゲインを小さく設定するようにしたので、主機に与える出力信号がCPP翼角が最大の場合よりも小さくなることにより、プロペラ翼角が小さいときでも主軸回転数のオーバーシュート・アンダーシュートを少なくして主軸回転数の周期的変動(ハンチング)を抑制することができ、これにより、主軸回転数をその安定性を損なうことなく制御することが可能となる。
(2)制御信号出力手段の制御ゲインは、翼角が最小値付近から最大値までの間で各翼角に対応して増大するように設定されるので、CPP翼角が最小値付近にある場合のみならず、CPP翼角全域にわたって、主軸回転数をその安定性を損なうことなく制御することができる。
【図面の簡単な説明】
【図1】本発明の可変ピッチプロペラ船の推進制御装置である。
【図2】制御信号出力器におけるゲイン設定のスケジュールを示す図である。
【図3】従来の可変ピッチプロペラ船の推進制御装置である。
【符号の説明】
1 主機
2 主軸
3 可変ピッチプロペラ
4 翼角制御手段
4a 翼角信号出力器
4b 変節装置
4c 翼角検出器
6 主軸回転数設定器
7 主軸回転数検出器
8 制御信号出力器
9 主機燃料制御装置
10 操縦レバー
Claims (2)
- 可変ピッチプロペラの翼角を制御する翼角制御手段と、主軸の目標回転数を設定する主軸回転数設定手段と、主軸の回転数を検出する主軸回転数検出手段と、前記主軸回転数設定手段と該主軸回転数検出手段により検出された主軸回転数との偏差に所定の制御ゲインを与えて前記主軸回転数を制御するための制御信号を出力する制御信号出力手段と、該制御信号出力手段からの信号を受けて主機への燃料供給量を制御する主機燃料供給制御手段とを備える可変ピッチプロペラ船の推進制御装置であって、
前記翼角制御手段は前記可変ピッチプロペラの翼角を検出する翼角検出手段を備え、
前記制御信号出力手段は、前記翼角検出手段からの出力信号を受け、検出された翼角が最小値付近のときに、翼角が最大値のときの制御ゲインよりも小さい制御ゲインを設定する、ことを特徴とする可変ピッチプロペラ船の推進制御装置。 - 前記制御信号出力手段は、翼角が最小値付近から最大値までの間で各翼角に対応して増大する制御ゲインを設定する、ことを特徴とする請求項1に記載の可変ピッチプロペラ船の推進制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003158561A JP2004359059A (ja) | 2003-06-03 | 2003-06-03 | 可変ピッチプロペラ船の推進制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003158561A JP2004359059A (ja) | 2003-06-03 | 2003-06-03 | 可変ピッチプロペラ船の推進制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004359059A true JP2004359059A (ja) | 2004-12-24 |
Family
ID=34051926
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003158561A Pending JP2004359059A (ja) | 2003-06-03 | 2003-06-03 | 可変ピッチプロペラ船の推進制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004359059A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010105437A (ja) * | 2008-10-28 | 2010-05-13 | Mitsubishi Heavy Ind Ltd | 可変ピッチプロペラ船の推進制御装置 |
| KR101479365B1 (ko) | 2010-08-09 | 2015-01-06 | 현대중공업 주식회사 | Cpp 추진 제어 시스템에서의 마스터쉽 변경 방법 |
| KR101489532B1 (ko) * | 2010-08-09 | 2015-02-06 | 현대중공업 주식회사 | Cpp 추진 제어 시스템에서의 부하 제어 방법 |
| KR101489531B1 (ko) * | 2010-08-09 | 2015-02-06 | 현대중공업 주식회사 | Cpp 추진 제어 시스템의 메인 엔진 rpm 제어 장치 및 방법 |
| EP2990327A1 (en) * | 2014-08-29 | 2016-03-02 | Caterpillar Propulsion Production AB | Marine vessel power system and method |
-
2003
- 2003-06-03 JP JP2003158561A patent/JP2004359059A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010105437A (ja) * | 2008-10-28 | 2010-05-13 | Mitsubishi Heavy Ind Ltd | 可変ピッチプロペラ船の推進制御装置 |
| KR101479365B1 (ko) | 2010-08-09 | 2015-01-06 | 현대중공업 주식회사 | Cpp 추진 제어 시스템에서의 마스터쉽 변경 방법 |
| KR101489532B1 (ko) * | 2010-08-09 | 2015-02-06 | 현대중공업 주식회사 | Cpp 추진 제어 시스템에서의 부하 제어 방법 |
| KR101489531B1 (ko) * | 2010-08-09 | 2015-02-06 | 현대중공업 주식회사 | Cpp 추진 제어 시스템의 메인 엔진 rpm 제어 장치 및 방법 |
| EP2990327A1 (en) * | 2014-08-29 | 2016-03-02 | Caterpillar Propulsion Production AB | Marine vessel power system and method |
| WO2016029983A1 (en) * | 2014-08-29 | 2016-03-03 | Caterpillar Propulsion Production Ab | Marine vessel power system and method |
| CN106604865A (zh) * | 2014-08-29 | 2017-04-26 | 卡特彼勒推进产品公司 | 船舶动力系统和方法 |
| US10730599B2 (en) | 2014-08-29 | 2020-08-04 | Caterpillar Propulsion Production Ab | Marine vessel power system and method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6998773B2 (ja) | 船舶の燃料消費を制御するための方法 | |
| JP5164043B2 (ja) | 船舶用ハイブリッド推進装置 | |
| JP6021752B2 (ja) | 船舶の運航方法及び船舶の運航装置 | |
| Vrijdag et al. | Control of propeller cavitation in operational conditions | |
| JP2004359059A (ja) | 可変ピッチプロペラ船の推進制御装置 | |
| JPS61169392A (ja) | 適合自動操舵方法および装置 | |
| JPH1059291A (ja) | 小型船舶の船位制御装置 | |
| JP2016176338A (ja) | ガスエンジンの空燃比制御装置及び空燃比制御装置付きガスエンジンを搭載した船舶 | |
| CA2198378C (en) | Method for optimizing the efficiency in ships with bow and stern screws as well as an arrangement for adjusting the rotation speed of the bow screw | |
| JP5951587B2 (ja) | 制御装置及びこれを備えた船舶、並びに統合制御方法 | |
| JP2019148212A (ja) | 舶用主機関の制御システム | |
| US11767093B2 (en) | Control device of marine propulsion device, control method thereof, and marine vessel | |
| JP6704149B2 (ja) | ガスエンジンの空燃比制御装置及び空燃比制御装置付きガスエンジンを搭載した船舶 | |
| US20190210705A1 (en) | Method for a propulsion arrangement for a marine vessel | |
| WO2010113655A1 (ja) | 舶用エンジン制御システム | |
| JPH042875Y2 (ja) | ||
| JP3165681B2 (ja) | トルク制限方法および回転翼機の高度保持装置 | |
| JP2012179968A (ja) | 自動操舵制御装置、自動操舵装置、自動操舵制御プログラム、及び自動操舵制御方法 | |
| KR20150028432A (ko) | 배기가스의 배출량을 고려한 동적 위치 제어 시스템 및 방법 | |
| WO2011004812A1 (ja) | ガバナ制御装置および制御方法 | |
| US20230057840A1 (en) | Commissioning strategy | |
| US20240132196A1 (en) | Ship | |
| US20220010737A1 (en) | Method and system for controlling a turbomachine with control saturations management | |
| JPS60146795A (ja) | 船舶の推進系制御装置 | |
| JPH088278Y2 (ja) | 舶用主機関制御装置 |