JP2004347349A - 水中解体装置 - Google Patents
水中解体装置 Download PDFInfo
- Publication number
- JP2004347349A JP2004347349A JP2003141854A JP2003141854A JP2004347349A JP 2004347349 A JP2004347349 A JP 2004347349A JP 2003141854 A JP2003141854 A JP 2003141854A JP 2003141854 A JP2003141854 A JP 2003141854A JP 2004347349 A JP2004347349 A JP 2004347349A
- Authority
- JP
- Japan
- Prior art keywords
- tubular structure
- end mill
- tool
- unit
- cutting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Working Measures On Existing Buildindgs (AREA)
Abstract
【課題】原子力発電所等から排出される放射能に汚染された管状構造物を水中で安全に効率よく切断して解体する。
【構成】水中解体装置は、水中で、管状構造物の下端を着脱自在に支持する回転テーブル14と、中間部を回転自在に支持する中間支持体16と、上端を押圧する上端抑え体8と、管状構造物を回転駆動する回転駆動部6と、エンドミル切断ユニット7とを備え、前記エンドミル切断ユニット7に設けたエンドミルバイト9は上下方向および水平方向に移動できるように設けられ、そのエンドミルバイト9により管状構造物3を周方向および軸方向に切断する。
【選択図】 図1
【構成】水中解体装置は、水中で、管状構造物の下端を着脱自在に支持する回転テーブル14と、中間部を回転自在に支持する中間支持体16と、上端を押圧する上端抑え体8と、管状構造物を回転駆動する回転駆動部6と、エンドミル切断ユニット7とを備え、前記エンドミル切断ユニット7に設けたエンドミルバイト9は上下方向および水平方向に移動できるように設けられ、そのエンドミルバイト9により管状構造物3を周方向および軸方向に切断する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は原子力発電所等の改修工事などにより発生する放射能汚染された管状構造物をプール等の水中で解体する装置に関する。
【0002】
【従来の技術】
原子力発電所やその他の放射線を取り扱う施設では、配管やタンク、容器等の管状構造物が寿命時期に達したとき、または劣化したときに交換等の改修工事が行われる。解体されたそれら管状構造物の切断片は放射能が安全レベルに低下するまで、特別な貯蔵所に長期間貯蔵される。
【0003】
貯蔵は周囲に放射能が漏洩しない材料もしくは構造の容器内に収容して行われるが、その際、規定容積の容器内に効率よく収容するため、管状構造物は出来るだけ細かく解体される。管状構造物を解体する際には作業環境が放射能に曝されないようにプール等の水中で行われ、例えばガス切断、プラズマ切断、放電加工を利用した切断等の方法で解体される。
【0004】
【発明が解決しようとする課題】
しかしガス切断やプラズマ切断による解体方法では、切断時の溶融金属で生成されるドロスの付着が障害になる事が多く、作業中断や、綺麗に切断されないために解体物の処理がしにくいという問題がある。さらにガスの火口やトーチ、プラズマ用電極等の消耗部品は定期的に交換する必要があるが、従来の解体装置ではそれらの交換作業時に被爆しやすいという問題もあった。
【0005】
一方、一般的な機械加工の分野ではエンドミルを使用した加工法がある。エンドミルは回転するエンドミルバイトで加工物を切削加工するもので、一般にはフライス、マシニングセンター等の工作機械に取り付け、加工物の正面や側面の切削加工、段加工、溝切削等を行う。しかしエンドミルを使用して放射能汚染された管状構造物を水中で効率よく切断加工する方法は知られていない。
【0006】
そこで本発明は、従来の放射能汚染された管状構造物を解体する際の問題を解決することを課題とし、そのためのエンドミルを使用した新しい水中使用型の解体装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
前記課題を解決する本発明は、放射能汚染された管状構造物3を水中で、支持して解体する装置であって、
水中に設置可能な装置架台2と、
その装置架台2上に配置され、その軸線が重力方向に位置されて管状構造物3の下端部外周を着脱自在に支持する下部支持部15を有する回転テーブル14と、
回転テーブル14に連結され、その軸線の回りに回転駆動する回転駆動部6と、
回転テーブル14上に支持された管状構造物3の軸線方向の中間部の外周を着脱自在に且つ、その管状構造物を軸線の回りに回転自在に支持する中間支持体16と、
回転テーブル14上に支持された管状構造物3の上端面を下方に着脱自在に押圧支持する上端抑え体8と、
エンドミルバイト9を前記軸線に直交して水平に保持すると共に、そのエンドミルバイト9を上下方向および前記軸線に直交する水平方向に駆動するエンドミル切断ユニット7と、を備え、
エンドミルバイト9により、水中で管状構造物3を周方向および軸線方向に切断するように構成された水中解体装置である(請求項1)。
【0008】
上記構成において、回転テーブル14に支持された管状構造物3の外周に孔を穿設する穴開けユニット5を設けることができる(請求項2)。
【0009】
上記構成において、前記上端抑え体8は管状構造物3を上方から覆うようにして抑える抑えプレート46を有し、その抑えプレート46にエンドミルバイト9が上下に通過できるスリット48を設けることができる(請求項3)。
【0010】
上記いずれかの構成において、水中にある前記エンドミルバイト9を遠隔操作により交換する交換ユニット70を設けることができる(請求項4)。
【0011】
上記構成において、前記交換ユニット70は、バイト支持体10との間でエンドミルバイト9を交換する交換機構71と、交換機構71との間でエンドミルバイト9の送受を行うバイト送受体72と、バイト送受体72の水平移動および垂直移動を行う移送装置73を備えることができる(請求項5)。
【0012】
【発明の実施の形態】
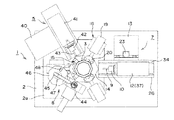
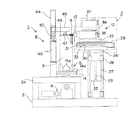
次に本発明の実施の形態を図面により説明する。図1は本発明に係る解体装置の正面図、図2は図1の右側面図(一部省略)、図3は図1の平面図である。これらの図において、解体装置1はその回転部分その他が防水型であり、それが水中に設置可能な装置架台2を備えている。装置架台2は、解体する管状構造物3を水中で安定して保持できるように、装置全体の重心が下方になるように設計される。そして解体装置1を例えばプール等の水中に沈めた際に装置架台2の底部がプールの底面に安定な状態で接する。なお図示の例は管状構造物3として八角形の金属筒を解体する場合を示している。
【0013】
装置架台2には管状構造物3を支持する支持部4と、管状構造物3に穴を開ける穴開けユニット5(図3)と、穴を開けた管状構造物3を回転駆動する回転駆動部6と、エンドミル切断ユニット7と、管状構造物3を上方から抑える上端抑え体8(図3)とを備えている。
そのエンドミル切断ユニット7にはエンドミルバイト9と、エンドミルバイト9を着脱自在に支持するドリルチャック式のバイト支持体10と、バイト支持体10を回転軸に支持固定するスピンドル35と、そのスピンドル35を水平方向に前進、後退させる水平駆動部11と、そのスピンドル35のバイト支持体10を回転駆動する回転駆動部12と、スピンドル35を昇降する昇降駆動部13が設けられる。なお図1には煩雑さを避けるため穴開けユニット5と上端抑え体8が省略されている。
【0014】
支持部4は下部支持部15と中間支持体16を有している。下部支持体15は管状構造物3の底部を支持する回転テーブル14と、その回転テーブル14の上面に120度間隔で設けられた3つのチャック15aにより構成され、管状構造物3の下部、特にその下端部分を、チャック駆動部15bにより周囲から中心に向かって把持して支持するようになっている。
【0015】
回転テーブル14の下面中央部に回転駆動部6の駆動軸が連結される。回転駆動部6はモータと減速ギア機構を有し、その減速ギア機構の主力軸である駆動軸の中間部は、装置架台2の一部を構成するフレーム2aに設けた軸受部17で軸支される。そして回転テーブル14の回転角度を検出するために、リミットスイッチや近接スイッチ等の回転位置検出手段14aが2つ設けられる。この回転位置検出手段14aは水上または陸上に設置された制御部(図示せず)に接続され、回転テーブル14の回転位置制御に利用される。なお回転駆動部6の駆動方向は一方向でもよいが、場合によっては正逆回転式とすることもできる。
【0016】
中間支持体16は管状構造物3の中間部外周を着脱自在に支持するもので、回転テーブル14の軸線の周囲に120度間隔で配置される。これら中間支持体16は装置架台2のフレーム2aから立設した3つの支柱18と、各支柱18にそれぞれ2つずつ上下に設けた空圧式等の往復駆動するシリンダ19と、各シリンダ19の駆動軸の先端に設けたローラ20とを有している。そして各シリンダ19に所定圧を加えることにより、そのローラ20で管状構造物3の中間外周を三方から均等に押圧して支持できると共に、管状構造物の回転を許容するようになっている。
【0017】
エンドミル切断ユニット7はユニット化されている。図2に示すように、装置架台2から支柱21が立設しており、その支柱21の途中に設けた固定部材22にネジ棒23の下端が軸支され、そのネジ棒23は上方に延長して減速ギア機構を有する回転駆動部24の駆動軸に連結される。またネジ棒23にはナット部材25が螺着され、そのナット部材25に昇降台26が連結される。
【0018】
また支柱21には上下方向に2本のガイド棒27が固定され、各ガイド棒27に昇降台26が案内されている。そして回転駆動部24により前記ネジ棒23が回転すると、昇降台26が2本のガイド棒27にガイドされて昇降する。そしてこれらネジ棒23、回転駆動部24、ナット部材25、昇降台26、ガイド棒27、ナット部材28等で前記昇降駆動部13を構成する。
【0019】
そして、その昇降台26の上に前記スピンドル35および前記水平駆動部11が設けられる。水平駆動部11は回転駆動部29と、回転駆動部29の駆動軸に連結したネジ棒30と、ネジ棒30の両端部を回転自在に支持する2つの軸受部31と、ネジ棒30に螺着したナット部材32と、ナット部材32に連結した移動体33と、移動体33を案内させる2本のレ−ル34を備えている。
【0020】
移動体33上にはスピンドル35が設けられ、そのスピンドル35の回転軸がベルト36を介して高速回転する駆動モータ37に連結される。そしてこれらスピンドル35と駆動モータ35により前記回転駆動部12が構成される。そして前述の如く、そのスピンドル35の回転軸にバイト支持体10が連結される。
【0021】
バイト支持体10は前記のようにドリルチャック式とされ、スピンドル35に直結されて高速回転し、水平駆動部11により前進または後退を行う。また、スピンドル35は昇降駆動部13により上下方向に移動する。
【0022】
次に、管状構造物3に穴を開ける穴開けユニット5は、図3に示すように、装置架台2から立設した中空状の支柱40と、支柱40の内部に配置した液圧式、気圧式または電動式で駆動する昇降駆動部(図示せず)と、その昇降駆動部の駆動軸に連結した回転駆動部41と、回転駆動部41の駆動軸に連結したドリルチャック42とドリルチャックに把持したドリル43を備えている。なお回転駆動部41にはドリル43を前進または後退する機能が内蔵されている。
【0023】
次に、穴開けユニット5の側方(図3では下方)には管状構造物3を上方から抑える上端抑え体8が示されている。
この上端抑え体8は、装置架台2から立設した支柱44と、支柱44に昇降自在に設けた抑え梁45と、抑え梁45にボールジョイントと皿バネを介して連結された板状の抑えプレート46とを備えている。このように抑え梁45に抑えプレート46をボールジョイントと皿バネからなる連結部材47で連結することにより、管状構造物3の上面が傾斜していても抑えプレート46がそれに追従して確実に管状構造物3の上面を押圧することができる。
【0024】
なお抑えプレート46には周縁から中心に向かって1本のスリット48が形成され、エンドミルバイト9で管状構造物3を切断する際に、図4に示す如く、最初にエンドミルバイト9をこのスリット48に差し込んで切断開始位置として位置決めできるようになっている。
【0025】
図4は上端抑え体8で管状構造物3の上面を抑え、その管状構造物3にエンドミルバイト9を近づけた状態を示す平面図、図5はそのA−A断面略図である。なお理解を容易にするために、これらの図には上端抑え体8の説明に関係ない部分は、例えば穴開けユニット5等は省略してある。
【0026】
図5に示すように、上端抑え体8を構成する支柱44は筒状とされ、その内部に気圧式等で駆動するシリンダ等からなる細長い昇降駆動部49が設けられ、その支柱44の上部外周には、90度の範囲で上下方向に延長する緩やかな螺旋状の図示しない螺旋スリットが形成され、その下端から上下方向に縦スリット50が形成され、その螺旋スリットおよび縦スリット50に抑え梁45の根元部が案内され、その抑え梁45の端部が昇降駆動部49の駆動軸と連結される。昇降駆動部49は抑え梁45を管状構造物3の高さに合わせて上下移動させる。そして、昇降駆動部49により抑え梁45を図4の待機位置である最上位の位置から下降させると、図示しない螺旋スリットに案内されて、図4の位置に回動しつつ下降する。次いで、抑え梁45は縦スリット50に案内されて図4の回転角度を保持した状態で下降し、抑えプレート46により管状構造物3の上面を下方に押さえつけるものである。
【0027】
次に図1〜図5を参照しながら、本発明の解体装置1により管状構造物3を解体する方法を説明する。解体には各種の方法があるが、ここでは管状構造物3の側面を胴切断する方法と縦切断する方法について説明する。
【0028】
(胴切断方法)
先ず、本発明の解体装置1をプール等の水中の所定位置に設置する。次に図1のようにクレーン等の吊り具60で管状構造物3を水中に吊り降ろし、支持部4に支持する。すなわち管状構造物3の底部を下部支持体15の回転テーブル14の上に載置して、チャック15aでその下端部分を周囲から支持し、更に3つの中間支持体16のシリンダ19を駆動し、ローラ20で管状構造物3の中間側部を三方から押圧して支持する。
【0029】
次に、図3に示す穴開けユニット5におけるドリル43の高さを胴切断位置に調整する。すなわち前記のように支柱40の内部に設けた昇降駆動部を駆動し、回転駆動部41を上下移動して高さ調整する。次に回転駆動部41を駆動し、そのドリルチャック42に把持したドリル43で管状構造物3の胴切断位置に横方向から穴を開ける。例えば管状構造物3が筒状の場合、その側壁を貫通する穴を開ける。
【0030】
次に回転駆動部6を駆動して回転テーブル14を回転し、管状構造物3を図3の位置から図4の位置まで回転する。この状態で前記のようにして開けた穴がエンドミル切断ユニット7のエンドミルバイト9の先端に対向する位置に移動する。一方、エンドミル切断ユニット7における昇降駆動部13を駆動してバイト支持体10の高さを切断開始位置に調整する。
【0031】
上記のようにして管状構造物3に開けた穴とエンドミルバイト9の高さを一致させた後、水平駆動部11を駆動してバイト支持体10を前進し、エンドミルバイト9を管状構造物3の穴に挿入する。この状態で管状構造物3の胴切断操作の準備が完了する。そこで回転駆動部12を駆動してスピンドルを回転し、エンドミルバイト9を高速回転すると共に、前記支持部4における回転駆動部6を駆動し、回転テーブル14上の管状構造物3を360度回転することにより胴切断が完了する。
【0032】
胴切断した管状構造物3はそのままクレーン等の吊上げ手段で水中から運び出すことができるが、更に、その分割部分を次に説明する縦切断方法により分割して細分化することができる。
【0033】
(縦切断方法)
管状構造物3を縦切断するには、先ず図4、図5に示す如く、昇降駆動部49を駆動して抑え梁45を下降させると共に、90度回転させて、その先端の抑えプレート46により管状構造物3の上面を押圧する。これによって管状構造物3は上下部分を安定に支持もしくは保持され、縦切断に際してぐらつかない状態になる。
【0034】
一方、エンドミル切断ユニット7のエンドミルバイト9の初期高さ(切断開始位置より僅かに上方の位置)は、昇降駆動部13を駆動してバイト支持体10の高さを調整することによって行う。次に、水平駆動部11を駆動してスピンドル35を前進し、エンドミルバイト9を管状構造物3の切断開始点の上方に前進する。この状態で管状構造物3の縦切断の準備が終了する。
【0035】
そこでスピンドル35の回転駆動部12を駆動して、エンドミルバイト9を高速回転し、昇降駆動部13を駆動してエンドミルバイト9を徐々に下降させていくことにより、エンドミルバイト9は抑えプレート46のスリット48を通過して縦切断を開始する。そしてエンドミルバイト9が管状構造物3の下端部に達したとき、縦切断操作が完了する。次いで、スピンドル35を上昇させると共に、抑えプレート46を上昇させる。そして、回転テーブル14を所定角度回転させ、その位置で前記同様に縦切断を行う。このような縦切断を繰り返すことにより、管状構造物9の水中解体を終了する。
【0036】
このような本発明の解体装置1に用いられるエンドミルバイト9は、耐磨耗性の高強度鋼材で作ることができる。しかしながら、その使用条件は極めて過酷で消耗が激しいため、それを定期的に交換する必要がある。しかし使用済みのエンドミルバイト9、それを支持するバイト支持体10や近傍の各機器類には安全レベル以上の放射性物質に汚染されている場合が多いので、その交換作業は遠隔操作により水中で行うことが望ましい。
【0037】
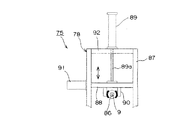
図6は本発明に係るエンドミルバイトの交換ユニット70を用い、エンドミル切断ユニット7に装着されたエンドミルバイト9を水中100で交換する状態を示す全体図、図7は交換ユニット70を構成する交換機構71の平面図、図8は図7のB−B矢視図である。
この交換ユニット70は、エンドミルバイト9の交換の際に、図6、図7の位置に配置され、それ以外のときには、上方に取り除かれる。或いは図7において、レール87a上を後部に移動待避するように構成することもできる。この交換ユニット70は、交換機構71(図6)、バイト送受体72および移送装置73を備える。
【0038】
交換機構71は、図6〜図8に示す、門形フレーム78を有し、それを装置架台2上に着脱自在に立設することができ、その門形フレーム78に図8に示す移動梁88が昇降自在に案内され、それが昇降駆動部89により昇降する。その移動梁88には、図7に示す一対の支持アーム76と、水平ストッパ79が夫々水平に突設されている。一対の支持アーム76は先端に向かって互いに近接する台形状に形成され、その頂辺位置に両支持フレーム76間を連結する連結棒77が配置され、その連結棒77と水平ストッパ79間にバイド旋回部74の主要部が軸支され、それが図6の実線の水平位置から鎖線の垂直位置に回動自在に配置されている。
このバイト旋回部74の上方にはバイト送受体72を有するバイトの移送装置73が配置されている。
【0039】
図6に示す移送装置73は、架台上を走行する自走装置またはクレーンや走行装置による他動装置によって水平方向に移動可能とされ、それに連結したバイト送受体72は移送装置73の内部に設けた駆動部により垂直方向に伸縮自在とされる。バイト送受体72は筒状に形成され、その先端部に電磁ホルダー72aが設けられる。電磁ホルダー72aはエンドミルバイト9を挿入可能とされ、非通電時に挿入したエンドミルバイト9を通電締め付けて把持し、非通電時にそれを解放するようになっている。
【0040】
次に、この移送装置73の下方に配置されるバイト旋回部74は、水平ストッパー79の先端部に設けた支点ピン80と、支点ピン80に回転自在に連結したコ字型の支持ブラケット81と、水平ストッパ79から垂直に延長した垂直ストッパー82と、前記連結棒77に一方の端部が回転自在に連結されたシリンダー等のスイング駆動部83と、スイング駆動部83の駆動軸から延長する二股のアーム部材84を備えている。
【0041】
バイト把持部75は、前記アーム部材84の先端部に連結された支持ピン85と、支持ピン85に回転自在に支持された電磁ホルダー86と、前記門型フレーム78の脚部87間に昇降自在に支持された細長い移動梁88と、移動梁88を上下方向に移動する昇降駆動部89と、移動梁88に沿ってスライド自在に支持された一対の把持体90と、把持体90の間隔を拡大または縮小してその開放状態と把持状態を切り替える拡縮駆動部91を備えている。
【0042】
なお図7において、門型フレーム78の各脚部87から横方向に延長する一対の細長いレール87aは、交換機構71の門型フレーム78及びそれに固定付属する機構を不要時後部に移動待避するレールである。(移動機構省略)
【0043】
電磁ホルダー86はエンドミルバイト9を通電時に把持し、非通電時にそれを解放するように構成されている。昇降駆動部89は例えば気圧式のシリンダまたは電動式の回転駆動装置により構成され、その駆動軸89aは門型フレーム78の横部材92を貫通し、その先端が移動梁88に連結される。移動梁88は中空状に形成され、その内部にネジ棒(図示せず)が回転自在に支持される。
【0044】
移動梁88に設けたネジ棒には図示しない右ネジのナット体と左ネジのナット体が螺着され、それらナット体が移動梁88の長手方向に移動自在に案内されると共に、それらが把持体90にそれぞれ連結される。またネジ棒の端部に減速ギア付きの可逆回転式モータからなる拡縮駆動部91の駆動軸が連結され、その拡縮駆動部91を正回転または逆回転することにより、各ナット体に連結した把持体90の間隔が拡大または縮小される。
【0045】
次に上記交換ユニット70を用いてエンドミル切断ユニット7に装着したエンドミルバイト9を交換する方法を説明する。先ず交換ユニット70をクレーン等により水中に降ろし、図6のようにエンドミル切断ユニット7に対向配置する。交換ユニット70の位置決めと安定化を図るために、例えばエンドミル切断ユニット7の装置架台2に一対の挿入孔を設けておき、その挿入孔に交換ユニット70の門型フレーム78(図8)の両方の脚部87を挿入する方法を採用することができる。
【0046】
ここでスイング駆動部83と電磁ホルダー86の関係について説明しておく。スイング駆動部83の駆動軸が中間位置まで伸張(前進)しているときは、エンドミルバイト9を把持する電磁ホルダー86が図6に示す水平状態になり、その側面は水平ストッパーで位置決めされる。そしてスイング駆動部83の駆動軸がさらに伸張すると電磁ホルダー86は図6の右方向に所定距離だけ前進する。逆にスイング駆動部83の駆動軸が縮小(後退)すると、電磁ホルダー86は所定距離だけ後退した後、支点ピン80を中心に回転して図6に示すように鎖線の垂直状態になり、その側面が垂直ストッパー82で位置決めされる。
【0047】
(使用済みのエンドミルバイトの回収)
先ず遠隔操作によりスイング駆動部83を駆動して、その駆動軸を最大に伸張すると、電磁ホルダー86が水平状態で前進し、その把持部にバイト支持体10に支持されたエンドミルバイト9の先端部が挿入される。次に、バイト支持体10を把持体90で把持し、エンドミル回転モータを低速寸動回転させ、バイト支持体10のドリルチャックを解放する。次に、電磁ホルダー86に通電してエンドミルバイト9を把持する。
【0048】
その状態でスイング駆動部83を駆動してその駆動軸を縮小させると、電磁ホルダー86に把持されたエンドミルバイト9がバイト支持体10から引き抜かれる。さらにスイング駆動部83の駆動軸を縮小すると、電磁ホルダー86が垂直に回転してその側面が垂直ストッパー82に接触して位置決めされる。
【0049】
次に図6に示す移送装置73を横移動してバイト送受体72の電磁ホルダー72aを前記電磁ホルダー86の上方位置に合わせる。そして移送装置73の駆動部を操作してバイト送受体72を下降し、電磁ホルダー86に把持されたエンドミルバイト9の先端部をバイト送受体72の電磁ホルダー72aに挿入する。
【0050】
次に、バイト旋回部74の電磁ホルダー86を非把持状態にすると共に、バイト送受体72の電磁ホルダ72aを把持状態にする。次いで移送装置73の駆動部を操作してバイト送受体72を上昇すると、エンドミルバイト9はバイト送受体72に従って上昇する。次に移送装置73を横移動してエンドミルバイト9を所定の収容容器内に回収する。
【0051】
(新しいエンドミルバイトの装着)
先ず、電磁ホルダー86を非把持状態とすると共に、スイング駆動部83を伸縮して電磁ホルダー86を垂直位置にし、バイト送受体72の先端部の電磁ホルダー72aは把持状態としておく。次に新しいエンドミルバイト9を移送装置73に設けたバイト投入部からバイト送受体72内に投入すると、バイト送受体72内を落下したエンドミルバイト9は電磁ホルダー72aの内部に保持される。なおエンドミルバイト9をバイト投入部に投入する際、その先端部が下になるようにする。次に移送装置73を横移動してバイト送受体72の電磁ホルダー72aを受け取り側の電磁ホルダー86の上方に合わせる。
【0052】
次に移送装置73の駆動部を操作してバイト送受体72を下降し、移送装置の電磁ホルダー72aの開口部と、バイト旋回部74の電磁ホルダー86の開口部をつき合わせた状態としてから電磁ホルダー72aを非把持状態にすると、それに保持されていたエンドミルバイト9の先端部が落下して電磁ホルダー86内に進入する。そこで電磁ホルダー86を把持状態にしてエンドミルバイト9を把持し、移送装置73の駆動部を操作してバイト送受体72を上昇する。
【0053】
次にスイング駆動部83を駆動してエンドミルバイト9を把持した電磁ホルダー86を水平に回転し、さらに前進させてエンドミルバイト9の後端部をバイト支持体10に挿入する。次に、バイト支持体10を把持体90で把持し、エンドミルモータを低速で寸動回転させ、バイト支持体10のドリルチャックを締め付ける。次にバイト支持体10の電磁チャックを把持状態とし、さらにスイング駆動部83を縮小(後退)することにより、新しいエンドミルバイト9の装着操作が完了する。そこで交換ユニット70を解体装置1から離反させ、所定位置に保管または待機させる。なお、煩雑になるので穴開けユニット5のドリル交換は、以上のエンドミルと同様に実施するため省略した。
【0054】
【発明の効果】
以上のように本発明に係る水中解体装置は、水中に設置可能な装置架台に、管状構造物を垂直に位置して、その下端を着脱自在に支持する回転テーブルと、その中間部を回転自在に支持する中間支持体と、管状構造物を回転駆動する回転駆動部と、管状構造物の上面を着脱自在に押圧支持する上端抑え体と、エンドミル切断ユニットとを備え、前記エンドミル切断ユニットに取り付けるエンドミルバイトが上下方向および水平方向に移動自在に設けられたことを特徴とする。
【0055】
本解体装置によれば、原子力発電所等から排出される放射能に汚染された管状構造物をエンドミルバイトにより、水中で周方向および軸線方向に切断して解体できるようにしたので、安全に解体操作が実施できる。それと共に、綺麗に切断できるので後工程の取扱いが容易になる。即ち、中間支持体により管状構造物の中間部を回転自在に支持することにより、その周方向の切断を容易に行える。また上端抑え体により管状構造物を上から抑えた状態とすることによって、管状構造物をより安定な状態で縦切断操作等を行うことができる。
さらには、従来のガス切断やプラズマ切断による解体方法のように切断屑が周囲に飛散して解体操作を中断させるようなこともない。さらに管状構造物を胴切断や縦切断できるので、貯蔵効率が高くなるような形態に解体できる。
【0056】
上記解体装置には、さらに管状構造物の外周に孔を穿設する穴開けユニットを設けることができる。このような穴開けユニットによりその穿孔作業を効率的に行い、次いで行うエンドミルバイトの作業時間を短縮できる。
【0057】
上記上端抑え体の抑えプレートには、エンドミルバイトが上下に通過できるスリットを設けることができる。このような抑えプレートで管状構造物の上面を抑えると、管状構造物をより安定に支持できると共に、抑えプレートで抑えた状態のままエンドミルバイトがスリットを通過して縦切断できる。
【0058】
さらに上記いずれかの解体装置において、水中にある前記エンドミルバイトを遠隔操作により交換する交換ユニットを設けることができる。このようなバイト交換ユニットを設けることにより、放射能汚染されたエンドミルバイトやバイト支持体等に直接触れたり接近することなく、使用済みのエンドミルバイトを新しいエンドミルバイトに安全に交換できる。
【0059】
上記交換ユニットを設けた解体装置において、その交換ユニットには、バイト支持体との間でエンドミルバイトを交換する交換機構と、交換機構との間でエンドミルバイトの送受を行うバイト送受体と、バイト送受体の水平移動および垂直移動を行う移動装置を備えることができる。交換ユニットをこのように構成すると、地上または水上と水中との間におけるエンドミルバイトの受け渡し操作及び受け取り操作を効率よく且つ迅速に行うことができる。
【図面の簡単な説明】
【図1】本発明に係る解体装置の正面図。
【図2】図1の右側面図。
【図3】図1の平面図。
【図4】上端抑え体8で管状構造物3の上面を抑え、その管状構造物3にエンドミルバイト9を近づけた状態を示す平面図。
【図5】図4のA−A断面図。
【図6】本発明に係るエンドミルバイトの交換ユニット70を用いてエンドミル切断ユニット7に装着されたエンドミルバイト9を水中100で交換する状態を示す全体図。
【図7】交換ユニット70を構成する交換機構71の平面図。
【図8】図7のB−B矢視図。
【符号の説明】
1 解体装置
2 装置架台
2a フレーム
3 管状構造物
4 支持部
5 穴開けユニット
6 回転駆動部
7 エンドミル切断ユニット
8 上端抑え体
9 エンドミルバイト
10 バイト支持体
11 水平駆動部
12 回転駆動部
13 昇降駆動部
14 回転テーブル
14a 回転位置検出手段
15 下部支持部
15a チャック
15b チャック駆動部
16 中間支持体
17 軸受部
18 支柱
19 シリンダ
20 ローラ
21 支柱
22 固定部材
23 ネジ棒
24 回転駆動部
25 ナット部材
26 昇降台
27 ネジ棒
28 ガイド体
29 回転駆動部
30 ネジ棒
31 軸受部
32 ガイド体
33 移動体
34 レ−ル
35 スピンドル
36 ベルト
37 駆動モータ
40 支柱
41 回転駆動部
42 ドリルチャック
43 ドリル
44 支柱
45 抑え梁
46 抑えプレート
47 連結部材
48 スリット
49 昇降駆動部
50 縦スリット
60 吊り具
70 交換ユニット
71 交換機構
72 バイト送受体
72a 電磁ホルダー
73 移動装置
74 バイト旋回部
75 バイト把持部
76 支持アーム
77 連結棒
78 門型フレーム
79 水平ストッパー
80 支点ピン
81 支持ブラケット
82 垂直ストッパー
83 スイング駆動部
84 アーム部材
85 支持ピン
86 電磁ホルダー
87 脚部
87a レール
88 移動梁
89 昇降駆動部
89a 駆動軸
90 把持体
91 拡縮駆動部
92 横部材
100 水中
【発明の属する技術分野】
本発明は原子力発電所等の改修工事などにより発生する放射能汚染された管状構造物をプール等の水中で解体する装置に関する。
【0002】
【従来の技術】
原子力発電所やその他の放射線を取り扱う施設では、配管やタンク、容器等の管状構造物が寿命時期に達したとき、または劣化したときに交換等の改修工事が行われる。解体されたそれら管状構造物の切断片は放射能が安全レベルに低下するまで、特別な貯蔵所に長期間貯蔵される。
【0003】
貯蔵は周囲に放射能が漏洩しない材料もしくは構造の容器内に収容して行われるが、その際、規定容積の容器内に効率よく収容するため、管状構造物は出来るだけ細かく解体される。管状構造物を解体する際には作業環境が放射能に曝されないようにプール等の水中で行われ、例えばガス切断、プラズマ切断、放電加工を利用した切断等の方法で解体される。
【0004】
【発明が解決しようとする課題】
しかしガス切断やプラズマ切断による解体方法では、切断時の溶融金属で生成されるドロスの付着が障害になる事が多く、作業中断や、綺麗に切断されないために解体物の処理がしにくいという問題がある。さらにガスの火口やトーチ、プラズマ用電極等の消耗部品は定期的に交換する必要があるが、従来の解体装置ではそれらの交換作業時に被爆しやすいという問題もあった。
【0005】
一方、一般的な機械加工の分野ではエンドミルを使用した加工法がある。エンドミルは回転するエンドミルバイトで加工物を切削加工するもので、一般にはフライス、マシニングセンター等の工作機械に取り付け、加工物の正面や側面の切削加工、段加工、溝切削等を行う。しかしエンドミルを使用して放射能汚染された管状構造物を水中で効率よく切断加工する方法は知られていない。
【0006】
そこで本発明は、従来の放射能汚染された管状構造物を解体する際の問題を解決することを課題とし、そのためのエンドミルを使用した新しい水中使用型の解体装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
前記課題を解決する本発明は、放射能汚染された管状構造物3を水中で、支持して解体する装置であって、
水中に設置可能な装置架台2と、
その装置架台2上に配置され、その軸線が重力方向に位置されて管状構造物3の下端部外周を着脱自在に支持する下部支持部15を有する回転テーブル14と、
回転テーブル14に連結され、その軸線の回りに回転駆動する回転駆動部6と、
回転テーブル14上に支持された管状構造物3の軸線方向の中間部の外周を着脱自在に且つ、その管状構造物を軸線の回りに回転自在に支持する中間支持体16と、
回転テーブル14上に支持された管状構造物3の上端面を下方に着脱自在に押圧支持する上端抑え体8と、
エンドミルバイト9を前記軸線に直交して水平に保持すると共に、そのエンドミルバイト9を上下方向および前記軸線に直交する水平方向に駆動するエンドミル切断ユニット7と、を備え、
エンドミルバイト9により、水中で管状構造物3を周方向および軸線方向に切断するように構成された水中解体装置である(請求項1)。
【0008】
上記構成において、回転テーブル14に支持された管状構造物3の外周に孔を穿設する穴開けユニット5を設けることができる(請求項2)。
【0009】
上記構成において、前記上端抑え体8は管状構造物3を上方から覆うようにして抑える抑えプレート46を有し、その抑えプレート46にエンドミルバイト9が上下に通過できるスリット48を設けることができる(請求項3)。
【0010】
上記いずれかの構成において、水中にある前記エンドミルバイト9を遠隔操作により交換する交換ユニット70を設けることができる(請求項4)。
【0011】
上記構成において、前記交換ユニット70は、バイト支持体10との間でエンドミルバイト9を交換する交換機構71と、交換機構71との間でエンドミルバイト9の送受を行うバイト送受体72と、バイト送受体72の水平移動および垂直移動を行う移送装置73を備えることができる(請求項5)。
【0012】
【発明の実施の形態】
次に本発明の実施の形態を図面により説明する。図1は本発明に係る解体装置の正面図、図2は図1の右側面図(一部省略)、図3は図1の平面図である。これらの図において、解体装置1はその回転部分その他が防水型であり、それが水中に設置可能な装置架台2を備えている。装置架台2は、解体する管状構造物3を水中で安定して保持できるように、装置全体の重心が下方になるように設計される。そして解体装置1を例えばプール等の水中に沈めた際に装置架台2の底部がプールの底面に安定な状態で接する。なお図示の例は管状構造物3として八角形の金属筒を解体する場合を示している。
【0013】
装置架台2には管状構造物3を支持する支持部4と、管状構造物3に穴を開ける穴開けユニット5(図3)と、穴を開けた管状構造物3を回転駆動する回転駆動部6と、エンドミル切断ユニット7と、管状構造物3を上方から抑える上端抑え体8(図3)とを備えている。
そのエンドミル切断ユニット7にはエンドミルバイト9と、エンドミルバイト9を着脱自在に支持するドリルチャック式のバイト支持体10と、バイト支持体10を回転軸に支持固定するスピンドル35と、そのスピンドル35を水平方向に前進、後退させる水平駆動部11と、そのスピンドル35のバイト支持体10を回転駆動する回転駆動部12と、スピンドル35を昇降する昇降駆動部13が設けられる。なお図1には煩雑さを避けるため穴開けユニット5と上端抑え体8が省略されている。
【0014】
支持部4は下部支持部15と中間支持体16を有している。下部支持体15は管状構造物3の底部を支持する回転テーブル14と、その回転テーブル14の上面に120度間隔で設けられた3つのチャック15aにより構成され、管状構造物3の下部、特にその下端部分を、チャック駆動部15bにより周囲から中心に向かって把持して支持するようになっている。
【0015】
回転テーブル14の下面中央部に回転駆動部6の駆動軸が連結される。回転駆動部6はモータと減速ギア機構を有し、その減速ギア機構の主力軸である駆動軸の中間部は、装置架台2の一部を構成するフレーム2aに設けた軸受部17で軸支される。そして回転テーブル14の回転角度を検出するために、リミットスイッチや近接スイッチ等の回転位置検出手段14aが2つ設けられる。この回転位置検出手段14aは水上または陸上に設置された制御部(図示せず)に接続され、回転テーブル14の回転位置制御に利用される。なお回転駆動部6の駆動方向は一方向でもよいが、場合によっては正逆回転式とすることもできる。
【0016】
中間支持体16は管状構造物3の中間部外周を着脱自在に支持するもので、回転テーブル14の軸線の周囲に120度間隔で配置される。これら中間支持体16は装置架台2のフレーム2aから立設した3つの支柱18と、各支柱18にそれぞれ2つずつ上下に設けた空圧式等の往復駆動するシリンダ19と、各シリンダ19の駆動軸の先端に設けたローラ20とを有している。そして各シリンダ19に所定圧を加えることにより、そのローラ20で管状構造物3の中間外周を三方から均等に押圧して支持できると共に、管状構造物の回転を許容するようになっている。
【0017】
エンドミル切断ユニット7はユニット化されている。図2に示すように、装置架台2から支柱21が立設しており、その支柱21の途中に設けた固定部材22にネジ棒23の下端が軸支され、そのネジ棒23は上方に延長して減速ギア機構を有する回転駆動部24の駆動軸に連結される。またネジ棒23にはナット部材25が螺着され、そのナット部材25に昇降台26が連結される。
【0018】
また支柱21には上下方向に2本のガイド棒27が固定され、各ガイド棒27に昇降台26が案内されている。そして回転駆動部24により前記ネジ棒23が回転すると、昇降台26が2本のガイド棒27にガイドされて昇降する。そしてこれらネジ棒23、回転駆動部24、ナット部材25、昇降台26、ガイド棒27、ナット部材28等で前記昇降駆動部13を構成する。
【0019】
そして、その昇降台26の上に前記スピンドル35および前記水平駆動部11が設けられる。水平駆動部11は回転駆動部29と、回転駆動部29の駆動軸に連結したネジ棒30と、ネジ棒30の両端部を回転自在に支持する2つの軸受部31と、ネジ棒30に螺着したナット部材32と、ナット部材32に連結した移動体33と、移動体33を案内させる2本のレ−ル34を備えている。
【0020】
移動体33上にはスピンドル35が設けられ、そのスピンドル35の回転軸がベルト36を介して高速回転する駆動モータ37に連結される。そしてこれらスピンドル35と駆動モータ35により前記回転駆動部12が構成される。そして前述の如く、そのスピンドル35の回転軸にバイト支持体10が連結される。
【0021】
バイト支持体10は前記のようにドリルチャック式とされ、スピンドル35に直結されて高速回転し、水平駆動部11により前進または後退を行う。また、スピンドル35は昇降駆動部13により上下方向に移動する。
【0022】
次に、管状構造物3に穴を開ける穴開けユニット5は、図3に示すように、装置架台2から立設した中空状の支柱40と、支柱40の内部に配置した液圧式、気圧式または電動式で駆動する昇降駆動部(図示せず)と、その昇降駆動部の駆動軸に連結した回転駆動部41と、回転駆動部41の駆動軸に連結したドリルチャック42とドリルチャックに把持したドリル43を備えている。なお回転駆動部41にはドリル43を前進または後退する機能が内蔵されている。
【0023】
次に、穴開けユニット5の側方(図3では下方)には管状構造物3を上方から抑える上端抑え体8が示されている。
この上端抑え体8は、装置架台2から立設した支柱44と、支柱44に昇降自在に設けた抑え梁45と、抑え梁45にボールジョイントと皿バネを介して連結された板状の抑えプレート46とを備えている。このように抑え梁45に抑えプレート46をボールジョイントと皿バネからなる連結部材47で連結することにより、管状構造物3の上面が傾斜していても抑えプレート46がそれに追従して確実に管状構造物3の上面を押圧することができる。
【0024】
なお抑えプレート46には周縁から中心に向かって1本のスリット48が形成され、エンドミルバイト9で管状構造物3を切断する際に、図4に示す如く、最初にエンドミルバイト9をこのスリット48に差し込んで切断開始位置として位置決めできるようになっている。
【0025】
図4は上端抑え体8で管状構造物3の上面を抑え、その管状構造物3にエンドミルバイト9を近づけた状態を示す平面図、図5はそのA−A断面略図である。なお理解を容易にするために、これらの図には上端抑え体8の説明に関係ない部分は、例えば穴開けユニット5等は省略してある。
【0026】
図5に示すように、上端抑え体8を構成する支柱44は筒状とされ、その内部に気圧式等で駆動するシリンダ等からなる細長い昇降駆動部49が設けられ、その支柱44の上部外周には、90度の範囲で上下方向に延長する緩やかな螺旋状の図示しない螺旋スリットが形成され、その下端から上下方向に縦スリット50が形成され、その螺旋スリットおよび縦スリット50に抑え梁45の根元部が案内され、その抑え梁45の端部が昇降駆動部49の駆動軸と連結される。昇降駆動部49は抑え梁45を管状構造物3の高さに合わせて上下移動させる。そして、昇降駆動部49により抑え梁45を図4の待機位置である最上位の位置から下降させると、図示しない螺旋スリットに案内されて、図4の位置に回動しつつ下降する。次いで、抑え梁45は縦スリット50に案内されて図4の回転角度を保持した状態で下降し、抑えプレート46により管状構造物3の上面を下方に押さえつけるものである。
【0027】
次に図1〜図5を参照しながら、本発明の解体装置1により管状構造物3を解体する方法を説明する。解体には各種の方法があるが、ここでは管状構造物3の側面を胴切断する方法と縦切断する方法について説明する。
【0028】
(胴切断方法)
先ず、本発明の解体装置1をプール等の水中の所定位置に設置する。次に図1のようにクレーン等の吊り具60で管状構造物3を水中に吊り降ろし、支持部4に支持する。すなわち管状構造物3の底部を下部支持体15の回転テーブル14の上に載置して、チャック15aでその下端部分を周囲から支持し、更に3つの中間支持体16のシリンダ19を駆動し、ローラ20で管状構造物3の中間側部を三方から押圧して支持する。
【0029】
次に、図3に示す穴開けユニット5におけるドリル43の高さを胴切断位置に調整する。すなわち前記のように支柱40の内部に設けた昇降駆動部を駆動し、回転駆動部41を上下移動して高さ調整する。次に回転駆動部41を駆動し、そのドリルチャック42に把持したドリル43で管状構造物3の胴切断位置に横方向から穴を開ける。例えば管状構造物3が筒状の場合、その側壁を貫通する穴を開ける。
【0030】
次に回転駆動部6を駆動して回転テーブル14を回転し、管状構造物3を図3の位置から図4の位置まで回転する。この状態で前記のようにして開けた穴がエンドミル切断ユニット7のエンドミルバイト9の先端に対向する位置に移動する。一方、エンドミル切断ユニット7における昇降駆動部13を駆動してバイト支持体10の高さを切断開始位置に調整する。
【0031】
上記のようにして管状構造物3に開けた穴とエンドミルバイト9の高さを一致させた後、水平駆動部11を駆動してバイト支持体10を前進し、エンドミルバイト9を管状構造物3の穴に挿入する。この状態で管状構造物3の胴切断操作の準備が完了する。そこで回転駆動部12を駆動してスピンドルを回転し、エンドミルバイト9を高速回転すると共に、前記支持部4における回転駆動部6を駆動し、回転テーブル14上の管状構造物3を360度回転することにより胴切断が完了する。
【0032】
胴切断した管状構造物3はそのままクレーン等の吊上げ手段で水中から運び出すことができるが、更に、その分割部分を次に説明する縦切断方法により分割して細分化することができる。
【0033】
(縦切断方法)
管状構造物3を縦切断するには、先ず図4、図5に示す如く、昇降駆動部49を駆動して抑え梁45を下降させると共に、90度回転させて、その先端の抑えプレート46により管状構造物3の上面を押圧する。これによって管状構造物3は上下部分を安定に支持もしくは保持され、縦切断に際してぐらつかない状態になる。
【0034】
一方、エンドミル切断ユニット7のエンドミルバイト9の初期高さ(切断開始位置より僅かに上方の位置)は、昇降駆動部13を駆動してバイト支持体10の高さを調整することによって行う。次に、水平駆動部11を駆動してスピンドル35を前進し、エンドミルバイト9を管状構造物3の切断開始点の上方に前進する。この状態で管状構造物3の縦切断の準備が終了する。
【0035】
そこでスピンドル35の回転駆動部12を駆動して、エンドミルバイト9を高速回転し、昇降駆動部13を駆動してエンドミルバイト9を徐々に下降させていくことにより、エンドミルバイト9は抑えプレート46のスリット48を通過して縦切断を開始する。そしてエンドミルバイト9が管状構造物3の下端部に達したとき、縦切断操作が完了する。次いで、スピンドル35を上昇させると共に、抑えプレート46を上昇させる。そして、回転テーブル14を所定角度回転させ、その位置で前記同様に縦切断を行う。このような縦切断を繰り返すことにより、管状構造物9の水中解体を終了する。
【0036】
このような本発明の解体装置1に用いられるエンドミルバイト9は、耐磨耗性の高強度鋼材で作ることができる。しかしながら、その使用条件は極めて過酷で消耗が激しいため、それを定期的に交換する必要がある。しかし使用済みのエンドミルバイト9、それを支持するバイト支持体10や近傍の各機器類には安全レベル以上の放射性物質に汚染されている場合が多いので、その交換作業は遠隔操作により水中で行うことが望ましい。
【0037】
図6は本発明に係るエンドミルバイトの交換ユニット70を用い、エンドミル切断ユニット7に装着されたエンドミルバイト9を水中100で交換する状態を示す全体図、図7は交換ユニット70を構成する交換機構71の平面図、図8は図7のB−B矢視図である。
この交換ユニット70は、エンドミルバイト9の交換の際に、図6、図7の位置に配置され、それ以外のときには、上方に取り除かれる。或いは図7において、レール87a上を後部に移動待避するように構成することもできる。この交換ユニット70は、交換機構71(図6)、バイト送受体72および移送装置73を備える。
【0038】
交換機構71は、図6〜図8に示す、門形フレーム78を有し、それを装置架台2上に着脱自在に立設することができ、その門形フレーム78に図8に示す移動梁88が昇降自在に案内され、それが昇降駆動部89により昇降する。その移動梁88には、図7に示す一対の支持アーム76と、水平ストッパ79が夫々水平に突設されている。一対の支持アーム76は先端に向かって互いに近接する台形状に形成され、その頂辺位置に両支持フレーム76間を連結する連結棒77が配置され、その連結棒77と水平ストッパ79間にバイド旋回部74の主要部が軸支され、それが図6の実線の水平位置から鎖線の垂直位置に回動自在に配置されている。
このバイト旋回部74の上方にはバイト送受体72を有するバイトの移送装置73が配置されている。
【0039】
図6に示す移送装置73は、架台上を走行する自走装置またはクレーンや走行装置による他動装置によって水平方向に移動可能とされ、それに連結したバイト送受体72は移送装置73の内部に設けた駆動部により垂直方向に伸縮自在とされる。バイト送受体72は筒状に形成され、その先端部に電磁ホルダー72aが設けられる。電磁ホルダー72aはエンドミルバイト9を挿入可能とされ、非通電時に挿入したエンドミルバイト9を通電締め付けて把持し、非通電時にそれを解放するようになっている。
【0040】
次に、この移送装置73の下方に配置されるバイト旋回部74は、水平ストッパー79の先端部に設けた支点ピン80と、支点ピン80に回転自在に連結したコ字型の支持ブラケット81と、水平ストッパ79から垂直に延長した垂直ストッパー82と、前記連結棒77に一方の端部が回転自在に連結されたシリンダー等のスイング駆動部83と、スイング駆動部83の駆動軸から延長する二股のアーム部材84を備えている。
【0041】
バイト把持部75は、前記アーム部材84の先端部に連結された支持ピン85と、支持ピン85に回転自在に支持された電磁ホルダー86と、前記門型フレーム78の脚部87間に昇降自在に支持された細長い移動梁88と、移動梁88を上下方向に移動する昇降駆動部89と、移動梁88に沿ってスライド自在に支持された一対の把持体90と、把持体90の間隔を拡大または縮小してその開放状態と把持状態を切り替える拡縮駆動部91を備えている。
【0042】
なお図7において、門型フレーム78の各脚部87から横方向に延長する一対の細長いレール87aは、交換機構71の門型フレーム78及びそれに固定付属する機構を不要時後部に移動待避するレールである。(移動機構省略)
【0043】
電磁ホルダー86はエンドミルバイト9を通電時に把持し、非通電時にそれを解放するように構成されている。昇降駆動部89は例えば気圧式のシリンダまたは電動式の回転駆動装置により構成され、その駆動軸89aは門型フレーム78の横部材92を貫通し、その先端が移動梁88に連結される。移動梁88は中空状に形成され、その内部にネジ棒(図示せず)が回転自在に支持される。
【0044】
移動梁88に設けたネジ棒には図示しない右ネジのナット体と左ネジのナット体が螺着され、それらナット体が移動梁88の長手方向に移動自在に案内されると共に、それらが把持体90にそれぞれ連結される。またネジ棒の端部に減速ギア付きの可逆回転式モータからなる拡縮駆動部91の駆動軸が連結され、その拡縮駆動部91を正回転または逆回転することにより、各ナット体に連結した把持体90の間隔が拡大または縮小される。
【0045】
次に上記交換ユニット70を用いてエンドミル切断ユニット7に装着したエンドミルバイト9を交換する方法を説明する。先ず交換ユニット70をクレーン等により水中に降ろし、図6のようにエンドミル切断ユニット7に対向配置する。交換ユニット70の位置決めと安定化を図るために、例えばエンドミル切断ユニット7の装置架台2に一対の挿入孔を設けておき、その挿入孔に交換ユニット70の門型フレーム78(図8)の両方の脚部87を挿入する方法を採用することができる。
【0046】
ここでスイング駆動部83と電磁ホルダー86の関係について説明しておく。スイング駆動部83の駆動軸が中間位置まで伸張(前進)しているときは、エンドミルバイト9を把持する電磁ホルダー86が図6に示す水平状態になり、その側面は水平ストッパーで位置決めされる。そしてスイング駆動部83の駆動軸がさらに伸張すると電磁ホルダー86は図6の右方向に所定距離だけ前進する。逆にスイング駆動部83の駆動軸が縮小(後退)すると、電磁ホルダー86は所定距離だけ後退した後、支点ピン80を中心に回転して図6に示すように鎖線の垂直状態になり、その側面が垂直ストッパー82で位置決めされる。
【0047】
(使用済みのエンドミルバイトの回収)
先ず遠隔操作によりスイング駆動部83を駆動して、その駆動軸を最大に伸張すると、電磁ホルダー86が水平状態で前進し、その把持部にバイト支持体10に支持されたエンドミルバイト9の先端部が挿入される。次に、バイト支持体10を把持体90で把持し、エンドミル回転モータを低速寸動回転させ、バイト支持体10のドリルチャックを解放する。次に、電磁ホルダー86に通電してエンドミルバイト9を把持する。
【0048】
その状態でスイング駆動部83を駆動してその駆動軸を縮小させると、電磁ホルダー86に把持されたエンドミルバイト9がバイト支持体10から引き抜かれる。さらにスイング駆動部83の駆動軸を縮小すると、電磁ホルダー86が垂直に回転してその側面が垂直ストッパー82に接触して位置決めされる。
【0049】
次に図6に示す移送装置73を横移動してバイト送受体72の電磁ホルダー72aを前記電磁ホルダー86の上方位置に合わせる。そして移送装置73の駆動部を操作してバイト送受体72を下降し、電磁ホルダー86に把持されたエンドミルバイト9の先端部をバイト送受体72の電磁ホルダー72aに挿入する。
【0050】
次に、バイト旋回部74の電磁ホルダー86を非把持状態にすると共に、バイト送受体72の電磁ホルダ72aを把持状態にする。次いで移送装置73の駆動部を操作してバイト送受体72を上昇すると、エンドミルバイト9はバイト送受体72に従って上昇する。次に移送装置73を横移動してエンドミルバイト9を所定の収容容器内に回収する。
【0051】
(新しいエンドミルバイトの装着)
先ず、電磁ホルダー86を非把持状態とすると共に、スイング駆動部83を伸縮して電磁ホルダー86を垂直位置にし、バイト送受体72の先端部の電磁ホルダー72aは把持状態としておく。次に新しいエンドミルバイト9を移送装置73に設けたバイト投入部からバイト送受体72内に投入すると、バイト送受体72内を落下したエンドミルバイト9は電磁ホルダー72aの内部に保持される。なおエンドミルバイト9をバイト投入部に投入する際、その先端部が下になるようにする。次に移送装置73を横移動してバイト送受体72の電磁ホルダー72aを受け取り側の電磁ホルダー86の上方に合わせる。
【0052】
次に移送装置73の駆動部を操作してバイト送受体72を下降し、移送装置の電磁ホルダー72aの開口部と、バイト旋回部74の電磁ホルダー86の開口部をつき合わせた状態としてから電磁ホルダー72aを非把持状態にすると、それに保持されていたエンドミルバイト9の先端部が落下して電磁ホルダー86内に進入する。そこで電磁ホルダー86を把持状態にしてエンドミルバイト9を把持し、移送装置73の駆動部を操作してバイト送受体72を上昇する。
【0053】
次にスイング駆動部83を駆動してエンドミルバイト9を把持した電磁ホルダー86を水平に回転し、さらに前進させてエンドミルバイト9の後端部をバイト支持体10に挿入する。次に、バイト支持体10を把持体90で把持し、エンドミルモータを低速で寸動回転させ、バイト支持体10のドリルチャックを締め付ける。次にバイト支持体10の電磁チャックを把持状態とし、さらにスイング駆動部83を縮小(後退)することにより、新しいエンドミルバイト9の装着操作が完了する。そこで交換ユニット70を解体装置1から離反させ、所定位置に保管または待機させる。なお、煩雑になるので穴開けユニット5のドリル交換は、以上のエンドミルと同様に実施するため省略した。
【0054】
【発明の効果】
以上のように本発明に係る水中解体装置は、水中に設置可能な装置架台に、管状構造物を垂直に位置して、その下端を着脱自在に支持する回転テーブルと、その中間部を回転自在に支持する中間支持体と、管状構造物を回転駆動する回転駆動部と、管状構造物の上面を着脱自在に押圧支持する上端抑え体と、エンドミル切断ユニットとを備え、前記エンドミル切断ユニットに取り付けるエンドミルバイトが上下方向および水平方向に移動自在に設けられたことを特徴とする。
【0055】
本解体装置によれば、原子力発電所等から排出される放射能に汚染された管状構造物をエンドミルバイトにより、水中で周方向および軸線方向に切断して解体できるようにしたので、安全に解体操作が実施できる。それと共に、綺麗に切断できるので後工程の取扱いが容易になる。即ち、中間支持体により管状構造物の中間部を回転自在に支持することにより、その周方向の切断を容易に行える。また上端抑え体により管状構造物を上から抑えた状態とすることによって、管状構造物をより安定な状態で縦切断操作等を行うことができる。
さらには、従来のガス切断やプラズマ切断による解体方法のように切断屑が周囲に飛散して解体操作を中断させるようなこともない。さらに管状構造物を胴切断や縦切断できるので、貯蔵効率が高くなるような形態に解体できる。
【0056】
上記解体装置には、さらに管状構造物の外周に孔を穿設する穴開けユニットを設けることができる。このような穴開けユニットによりその穿孔作業を効率的に行い、次いで行うエンドミルバイトの作業時間を短縮できる。
【0057】
上記上端抑え体の抑えプレートには、エンドミルバイトが上下に通過できるスリットを設けることができる。このような抑えプレートで管状構造物の上面を抑えると、管状構造物をより安定に支持できると共に、抑えプレートで抑えた状態のままエンドミルバイトがスリットを通過して縦切断できる。
【0058】
さらに上記いずれかの解体装置において、水中にある前記エンドミルバイトを遠隔操作により交換する交換ユニットを設けることができる。このようなバイト交換ユニットを設けることにより、放射能汚染されたエンドミルバイトやバイト支持体等に直接触れたり接近することなく、使用済みのエンドミルバイトを新しいエンドミルバイトに安全に交換できる。
【0059】
上記交換ユニットを設けた解体装置において、その交換ユニットには、バイト支持体との間でエンドミルバイトを交換する交換機構と、交換機構との間でエンドミルバイトの送受を行うバイト送受体と、バイト送受体の水平移動および垂直移動を行う移動装置を備えることができる。交換ユニットをこのように構成すると、地上または水上と水中との間におけるエンドミルバイトの受け渡し操作及び受け取り操作を効率よく且つ迅速に行うことができる。
【図面の簡単な説明】
【図1】本発明に係る解体装置の正面図。
【図2】図1の右側面図。
【図3】図1の平面図。
【図4】上端抑え体8で管状構造物3の上面を抑え、その管状構造物3にエンドミルバイト9を近づけた状態を示す平面図。
【図5】図4のA−A断面図。
【図6】本発明に係るエンドミルバイトの交換ユニット70を用いてエンドミル切断ユニット7に装着されたエンドミルバイト9を水中100で交換する状態を示す全体図。
【図7】交換ユニット70を構成する交換機構71の平面図。
【図8】図7のB−B矢視図。
【符号の説明】
1 解体装置
2 装置架台
2a フレーム
3 管状構造物
4 支持部
5 穴開けユニット
6 回転駆動部
7 エンドミル切断ユニット
8 上端抑え体
9 エンドミルバイト
10 バイト支持体
11 水平駆動部
12 回転駆動部
13 昇降駆動部
14 回転テーブル
14a 回転位置検出手段
15 下部支持部
15a チャック
15b チャック駆動部
16 中間支持体
17 軸受部
18 支柱
19 シリンダ
20 ローラ
21 支柱
22 固定部材
23 ネジ棒
24 回転駆動部
25 ナット部材
26 昇降台
27 ネジ棒
28 ガイド体
29 回転駆動部
30 ネジ棒
31 軸受部
32 ガイド体
33 移動体
34 レ−ル
35 スピンドル
36 ベルト
37 駆動モータ
40 支柱
41 回転駆動部
42 ドリルチャック
43 ドリル
44 支柱
45 抑え梁
46 抑えプレート
47 連結部材
48 スリット
49 昇降駆動部
50 縦スリット
60 吊り具
70 交換ユニット
71 交換機構
72 バイト送受体
72a 電磁ホルダー
73 移動装置
74 バイト旋回部
75 バイト把持部
76 支持アーム
77 連結棒
78 門型フレーム
79 水平ストッパー
80 支点ピン
81 支持ブラケット
82 垂直ストッパー
83 スイング駆動部
84 アーム部材
85 支持ピン
86 電磁ホルダー
87 脚部
87a レール
88 移動梁
89 昇降駆動部
89a 駆動軸
90 把持体
91 拡縮駆動部
92 横部材
100 水中
Claims (5)
- 放射能汚染された管状構造物3を水中で、支持して解体する装置であって、
水中に設置可能な装置架台2と、
その装置架台2上に配置され、その軸線が重力方向に位置されて管状構造物3の下端部外周を着脱自在に支持する下部支持部15を有する回転テーブル14と、
回転テーブル14に連結され、その軸線の回りに回転駆動する回転駆動部6と、
回転テーブル14上に支持された管状構造物3の軸線方向の中間部の外周を着脱自在に且つ、その管状構造物を軸線の回りに回転自在に支持する中間支持体16と、
回転テーブル14上に支持された管状構造物3の上端面を下方に着脱自在に押圧支持する上端抑え体8と、
エンドミルバイト9を前記軸線に直交して水平に保持すると共に、そのエンドミルバイト9を上下方向および前記軸線に直交する水平方向に駆動するエンドミル切断ユニット7と、を備え、
エンドミルバイト9により、水中で管状構造物3を周方向および軸線方向に切断するように構成された水中解体装置。 - 請求項1において、回転テーブル14に支持された管状構造物3の外周に孔を穿設する穴開けユニット5を有する水中解体装置。
- 請求項1において、前記上端抑え体8は管状構造物3を上方から覆うようにして抑える抑えプレート46を有し、その抑えプレート46にエンドミルバイト9が上下に通過できるスリット48を設けたことを特徴とする水中解体装置。
- 請求項1ないし3のいずれかにおいて、水中にある前記エンドミルバイト9を遠隔操作により交換する交換ユニット70を設けたことを特徴とする水中解体装置。
- 請求項4において、前記交換ユニット70は、バイト支持体10との間でエンドミルバイト9を交換する交換機構71と、交換機構71との間でエンドミルバイト9の送受を行うバイト送受体72と、バイト送受体72の水平移動および垂直移動を行う移送装置73を備えていることを特徴とする水中解体装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003141854A JP2004347349A (ja) | 2003-05-20 | 2003-05-20 | 水中解体装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003141854A JP2004347349A (ja) | 2003-05-20 | 2003-05-20 | 水中解体装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004347349A true JP2004347349A (ja) | 2004-12-09 |
Family
ID=33530104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003141854A Pending JP2004347349A (ja) | 2003-05-20 | 2003-05-20 | 水中解体装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004347349A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101749462B1 (ko) * | 2016-08-12 | 2017-06-20 | 두산중공업 주식회사 | 제염 대상물의 관 마개 제거 장치 |
| KR101945455B1 (ko) * | 2017-05-11 | 2019-02-08 | 한전원자력연료 주식회사 | 드럼 절단 시스템 |
| KR101963587B1 (ko) * | 2018-03-13 | 2019-03-29 | (주)오르비텍 | 방사능 오염 폐드럼 절단장치 및 그 절단장치를 이용한 폐드럼 절단방법 |
| KR20200123524A (ko) * | 2019-04-22 | 2020-10-30 | 주식회사 무진기연 | 중수로 사용후핵연료 바스켓 절단장비 |
| KR20210004098A (ko) * | 2019-07-03 | 2021-01-13 | 한국원자력연구원 | 사용후핵연료집합체 해체 장치 및 이를 이용한 해체 방법 |
| KR102351442B1 (ko) * | 2020-10-22 | 2022-01-17 | 한국수력원자력 주식회사 | 중수로 사용후핵연료가 수용된 연료바스켓의 절단장치 |
| US11630005B1 (en) * | 2022-01-13 | 2023-04-18 | Eli Yudkevich | Machining monitor and a method for monitoring a machining of an object |
| KR20230067116A (ko) * | 2021-11-09 | 2023-05-16 | 한국수력원자력 주식회사 | 원자로공동내 수중절단 시스템 및 방법 |
| TWI889575B (zh) * | 2024-10-16 | 2025-07-01 | 國家原子能科技研究院 | 一種鋼筒上蓋與外殼間銲道切割裝置 |
| KR102940325B1 (ko) | 2024-08-06 | 2026-03-20 | 한전케이피에스 주식회사 | 방사화된 파이프 수중 이동 시스템 |
-
2003
- 2003-05-20 JP JP2003141854A patent/JP2004347349A/ja active Pending
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101749462B1 (ko) * | 2016-08-12 | 2017-06-20 | 두산중공업 주식회사 | 제염 대상물의 관 마개 제거 장치 |
| KR101945455B1 (ko) * | 2017-05-11 | 2019-02-08 | 한전원자력연료 주식회사 | 드럼 절단 시스템 |
| KR101963587B1 (ko) * | 2018-03-13 | 2019-03-29 | (주)오르비텍 | 방사능 오염 폐드럼 절단장치 및 그 절단장치를 이용한 폐드럼 절단방법 |
| KR102269339B1 (ko) * | 2019-04-22 | 2021-06-28 | 주식회사 무진기연 | 중수로 사용후핵연료 바스켓 절단장비 |
| KR20200123524A (ko) * | 2019-04-22 | 2020-10-30 | 주식회사 무진기연 | 중수로 사용후핵연료 바스켓 절단장비 |
| KR20210004098A (ko) * | 2019-07-03 | 2021-01-13 | 한국원자력연구원 | 사용후핵연료집합체 해체 장치 및 이를 이용한 해체 방법 |
| KR102214327B1 (ko) * | 2019-07-03 | 2021-02-10 | 한국원자력연구원 | 사용후핵연료집합체 해체 장치 및 이를 이용한 해체 방법 |
| KR102351442B1 (ko) * | 2020-10-22 | 2022-01-17 | 한국수력원자력 주식회사 | 중수로 사용후핵연료가 수용된 연료바스켓의 절단장치 |
| WO2022086223A1 (ko) * | 2020-10-22 | 2022-04-28 | 한국수력원자력 주식회사 | 중수로 사용후핵연료가 수용된 연료바스켓의 절단장치 |
| EP4235701A4 (en) * | 2020-10-22 | 2024-10-16 | Korea Hydro & Nuclear Power Co., Ltd | CUTTING APPARATUS FOR FUEL BASKET CONTAINING IRRADIATED NUCLEAR FUEL IN HEAVY WATER REACTOR |
| KR20230067116A (ko) * | 2021-11-09 | 2023-05-16 | 한국수력원자력 주식회사 | 원자로공동내 수중절단 시스템 및 방법 |
| KR102662554B1 (ko) * | 2021-11-09 | 2024-04-30 | 한국수력원자력 주식회사 | 원자로공동내 수중절단 시스템 및 방법 |
| US11630005B1 (en) * | 2022-01-13 | 2023-04-18 | Eli Yudkevich | Machining monitor and a method for monitoring a machining of an object |
| KR102940325B1 (ko) | 2024-08-06 | 2026-03-20 | 한전케이피에스 주식회사 | 방사화된 파이프 수중 이동 시스템 |
| TWI889575B (zh) * | 2024-10-16 | 2025-07-01 | 國家原子能科技研究院 | 一種鋼筒上蓋與外殼間銲道切割裝置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106677699B (zh) | 一种煤矿用自动化液压钻机 | |
| CN106194072B (zh) | 外挂式自动换杆钻机 | |
| WO2023159299A9 (en) | Systems, tools and methods for disassembling and segmenting a calandria nuclear reactor | |
| JP2004347349A (ja) | 水中解体装置 | |
| CN114888467A (zh) | 一种管材激光切割设备及管材切割方法 | |
| CN118123070B (zh) | 一种废屑收集式渣浆泵生产用钻孔装置 | |
| JP2018513931A (ja) | 穿孔機用ロッド装着装置 | |
| JP2017089150A (ja) | ボーリングロボット | |
| CN210099010U (zh) | 一种机械加工用钻床 | |
| CN115012827B (zh) | 一种桩基井扩孔装置 | |
| CN214769062U (zh) | 一种多角度调节的钻孔装置 | |
| RU2618806C1 (ru) | Устройство для отработки откосов уступов | |
| CN108071339B (zh) | 一种全自动坑道钻机 | |
| CN212021264U (zh) | 一种桥梁施工用冲击钻 | |
| JP2005088129A (ja) | 水中切断装置 | |
| CN214920744U (zh) | 一种便于调节的钢结构生产用钻孔装置 | |
| CN215919544U (zh) | 一种钢结构焊接机器人的焊件定位装置 | |
| CN211168574U (zh) | 一种可以定向走动的挂具 | |
| CN106869789B (zh) | 全液压双层结构可避障自动打眼方法 | |
| CN207695902U (zh) | 一种大直径钻头焊接装置 | |
| JPH09141436A (ja) | 自動溶接設備および溶接方法 | |
| CN216729894U (zh) | 一种销轴的双头倒角加工设备 | |
| CN120440761B (zh) | 一种智能抓杆器 | |
| CN223616804U (zh) | 一种钻孔设备 | |
| CN219262289U (zh) | 一种滑移式机械手和钻机 |