JP2004251663A - 角速度センサ - Google Patents
角速度センサ Download PDFInfo
- Publication number
- JP2004251663A JP2004251663A JP2003040087A JP2003040087A JP2004251663A JP 2004251663 A JP2004251663 A JP 2004251663A JP 2003040087 A JP2003040087 A JP 2003040087A JP 2003040087 A JP2003040087 A JP 2003040087A JP 2004251663 A JP2004251663 A JP 2004251663A
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- velocity sensor
- arm
- arms
- piezoelectric element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

































Landscapes
- Gyroscopes (AREA)
Abstract
【解決手段】支持部11と第1アーム12a,12bと第2アーム13a,13bとを有するH型振動子10を備えた角速度センサ101において、第1アーム12a,12b及び第2アーム13a,13bの根元を細くすることで、この部分の剛性を低下させる。具体的には、根元に溝21〜24,31〜34を形成する。若しくは、第1及び第2アーム12a,12b,13a,13bを支持する支持部11に、中心Cに対して点対称の穴25,26を設け、支持部11の剛性を低下させる。このほか、各アーム若しくは支持部11を挟むように駆動用圧電素子40a,40b、検出用圧電素子50a,50b,60a,60bを形成することで、駆動効率の向上及び差動信号によるS/N比の向上を図る。
【選択図】 図8
Description
【発明の属する技術分野】
本発明は、回転する物体の角速度を検出する角速度センサに関し、特にMEMS(Micro Electro Mechanical System)を使用した角速度センサに関する。
【0002】
【従来の技術】
近年、ビデオカメラの手振れや検知技術,カーナビゲーションの自立走行システム,サイド・エアバック開放タイミング用のロール角検知,車やロボットの姿勢制御用等において、振動型ジャイロスコープによる角速度センサが広く使用されている。また、角速度センサの分野においては、車両の走行安定性を向上すべく、車両横滑り防止システムやカーブ走行時の姿勢制御システムなどに採用し得る程度にまで小型で且つ高精度化及び高信頼性化が図られたものが強く求められている。
【0003】
圧電材を用いた従来の角速度センサとしては、振動子の形状に基づいて類別されたビーム型及び音叉型のものがある。図45は、従来のビーム型角速度センサの一例である角速度センサ800を表す。図45(a)は、角速度センサ800の斜視図であり、図45(b)は、図45(a)の線B1−B1に沿った断面図である。角速度センサ800は、ビーム形状乃至直方状の振動子810と、これを図外の支持体に対して固定するための支持ワイヤ820と、駆動用圧電素子830と、一対の検出用圧電素子840とを備える。振動子810は、エリンバ等の恒弾性金属を含んで構成され、接地されている。支持ワイヤ820にはピアノ線等が用いられる。駆動用圧電素子830は、振動子810上に形成された圧電体831と、これに積層形成された電極832とを有する。一対の検出用圧電素子840は、各々、振動子810において駆動用圧電素子830が設けられた面に対して垂直な面に設けられ、振動子810上に形成された圧電体841と、これに積層形成された電極842とを有する。圧電体831,841には圧電セラミックが用いられる。
【0004】
このような構成の角速度センサ800において、駆動用圧電素子830に対して所定の交流電圧を印加すると、圧電体831が逆圧電効果によって伸縮し、これに起因して振動子810がX軸方向に屈曲振動する。この状態において、振動子810をZ軸回りに角速度ωで回転させると、振動子810に対して、Y軸方向にコリオリ力F(F=−2mVω,m:振動子質量,V:振動速度)が作用し、振動子810はY軸方向にも振動する。即ち、振動子810の屈曲振動は、X軸方向及びY軸方向の成分を有する合成振動となる。合成振動する振動子810におけるY軸に垂直な面の歪みは、検出用圧電素子840の圧電体841による圧電効果に基づいて検出され、検出用圧電素子840からは、コリオリ力F乃至角速度ωに比例した出力が得られる。
【0005】
図46は、従来の音叉型角速度センサの一例である角速度センサ900を表す。角速度センサ900は、音叉形状の振動子910と、駆動用圧電素子920と、一対の検出用圧電素子930とを備える。振動子910は、エンリバ等の恒弾性金属を含み、又部911と、これから延出する2本のアーム912,913とを有して構成され、接地されている。アーム912は、駆動板912a及びこれに直交して接合された検出板913bを有する。駆動用圧電素子920は、アーム912の駆動板912aに設けられ、圧電体912と、これに積層形成された電極922とを有する。一対の検出用圧電素子930は、各々、検出板912b,913bに設けられ、圧電体931と、これに積層形成された電極932とを有する。検出用圧電素子930は、駆動用圧電素子920に対して直交に配向するように配設されている。
【0006】
このような構成の角速度センサ900において、駆動用圧電素子920に対して所定の交流電圧を印加すると、圧電体921の逆圧電効果に基づいて、アーム912及びアーム912は、X軸方向において図中矢印で示すような音叉振動する。このとき、振動子910をZ軸回りに角速度ωで回転させると、上記の方程式に基づいて、振動子910にはY軸方向にコリオリ力Fが作用し、アーム912,913がY軸方向にも振動する。アーム912,913におけるY軸に垂直な面の歪みを、検出用圧電素子930による圧電効果に基づいて検出することによって、コリオリ力F乃至角速度ωに比例した出力が得られる。
【0007】
以上のようなコリオリ力Fを利用した振動型角速度センサ(ジャイロ)は、フォトリソグラフィーをはじめとした半導体加工技術を用いて小型化することが望まれている。例えば、振動子部分を水晶等の圧電素子で形成したジャイロ等は以下に示す特許文献1等で、また、振動子部分に半導体基板を使って形成したジャイロ等は以下に示す特許文献2又は3等で、その小型化が提案されている。
【0008】
【特許文献1】
特開平11−206162号公報
【特許文献2】
特開平11−237247号公報
【特許文献3】
特開平10−47971号公報
【0009】
しかしながら、以上の文献で開示されたように半導体技術を用いて角速度センサを小型化した場合、振動子質量mが小さくなり、発生するコリオリ力Fが減少する。このため、角速度センサの感度が低下してしまうという問題が発生する。尚、低下した感度を補うために、後段にアンプを設けることは、所望の信号以外にノイズも増幅してしまうため、S/N比が劣化する。従って、角速度センサの感度を向上させるためには、ノイズ成分を減らすか、振動子単体での高感度化を図ることが重要な課題となっている。
【0010】
本発明は、このような課題を解決することを目的としており、例えば半導体技術を用いて小型化された場合でも、感度よく回転角速度を検知できる角速度センサを提供することを目的とする。
【0011】
【課題を解決するための手段】
かかる目的を達成するために、本発明は、請求項1記載のように、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第1の腕部と該第1の腕部を振動させるための第1の圧電素子とを含む振動部と、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第2の腕部と該第2の腕部に発生した振動を検出するための第2の圧電素子とを含む検出部とを有する角速度センサにおいて、前記第1及び第2の腕部と一体形成された支持部を有して構成され、この構成において、前記第1及び第2の腕部の少なくとも一方における前記支持部側の端が該第1又は第2の腕部の胴体幅よりも細くなっている。振動部分である腕と該腕から伝播した振動を検出する腕との根元部分を胴体部分よりも細くすることで、この根元部分の剛性が低下するため、実質的な腕の長さが長くなる。従って、面内振動で腕が開閉する駆動モードにおける腕のモーメントを増大させることができ、この結果、アームの駆動速度を増加させることが達成されるため、回転角速度が加わった際に発生するコリオリ力が大きくなり、角速度センサの高感度化を図ることができる。尚、この効果は、例えば半導体技術を用いて小型化された角速度センサでも同様にすることができる。
【0012】
また、請求項1記載の前記角速度センサは、例えば請求項2記載のように、前記第1及び第2の腕部の少なくとも一方における前記支持部側の端に溝を有することで、上記した根元部分を細くすることを達成してもよい。
【0013】
また、請求項2記載の前記溝は、例えば請求項3記載のように、前記腕部を外周するように形成されていてもよい。
【0014】
また、本発明は、請求項4記載のように、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第1の腕部と該第1の腕部を振動させるための第1の圧電素子とを含む振動部と、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第2の腕部と該第2の腕部に発生した振動を検出するための第2の圧電素子とを含む検出部とを有する角速度センサにおいて、前記第1及び第2の腕部と一体形成された支持部と、該支持部に形成された2つ以上の穴とを有して構成される。振動部分である腕と発生した振動を検出するための腕とを連結する支持部に穴を設けることで、この部分の剛性が低下する。連結部(支持部)の剛性を低下させることで、振動部分の腕で発生した振動を検出用の腕に効率よく伝播させることが可能となる。従って、発生した振動を効率よく検出することが可能となる。即ち、角速度センサの感度が向上される。また、上記のように腕を支持する支持部の剛性を低下させることは、腕自体の自由度を増大させることにも繋がるため、結果として面内振動で腕が開閉する駆動モードにおける腕のモーメントを増大させることができ、アームの駆動速度を増加させることが達成される。これにより、回転角速度が加わった際に発生するコリオリ力が大きくなり、角速度センサの高感度化を図ることができる。尚、これらの効果は、例えば半導体技術を用いて小型化された角速度センサでも同様にすることができる。
【0015】
また、請求項4記載の前記穴は、好ましくは請求項5記載のように、前記支持部の中心に関して点対称に形成される。2対の腕を効率よく共振させるためには、振動子自体の対称性を保つことが重要である。従って、この振動子に形成する穴にも対称性が要求される。
【0016】
また、本発明は、請求項6記載のように、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第1の腕部と該第1の腕部を振動させるための第1の圧電素子とを含む振動部と、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第2の腕部と該第2の腕部に発生した振動を検出するための第2の圧電素子とを含む検出部とを有する角速度センサにおいて、前記第1及び第2の圧電素子の少なくとも一方が前記腕部の胴体部分であって対向する2面に形成された構成を有する。駆動モードでは、振動部分の腕の側面が印加された高周波信号に基づいて伸縮を繰り返す。そこで、圧電定数d31を有効に活用するために、この伸縮部分を挟み込むように圧電素子を形成する。これにより、振動側の腕の振幅を増大することができ、対応する形で検出側の腕に伝播する振動の振幅を増大することができる。検出側の腕における振幅が増大するということは、検出される信号の振幅も増大するということに繋がるため、結果的に角速度センサの検出感度を向上させることが可能となる。また、検出モードでは、腕を挟み込むように圧電素子を形成することで、これらから出力された2つの信号を差動信号として使用することが可能となる。このように差動信号を使用することで、外来ノイズ等による影響を排除でき、S/N比が向上される。従って、角速度センサの検出感度を向上させることができる。
【0017】
また、請求項7記載のように、請求項1から6の何れか1項に記載の前記第1及び/又は第2の圧電素子は、第1及び第2の電極膜で挟まれた圧電体を含んで構成され、同じく前記第1の電極膜は、少なくとも前記圧電体を位置決めするための凸部を有して構成されることが好ましい。これにより、例えばバルク等で作製した圧電素子の振動子への貼り合わせを正確且つ容易に行うことが可能となり、角速度センサの歩留り及び製造効率を向上させることが可能となる。
【0018】
また、請求項1から6の何れか1項に記載の前記支持部と前記第1の腕部と前記第2の腕部とのうち少なくとも1つは、請求項8記載のように、前記第1及び/又は第2の圧電素子を位置決めするための凸部又は凹部を有して構成されることが好ましい。これにより、例えばバルク等で作製した圧電素子の振動子への貼り合わせを正確且つ容易に行うことが可能となり、角速度センサの歩留り及び製造効率を向上させることが可能となる。
【0019】
また、請求項1から8の何れか1項に記載の前記第1及び/又は第2の圧電素子は、例えば請求項9記載のように、樹脂により前記支持部と前記第1又は第2の腕部とのうち少なくとも一方に固定されているように構成することもできる。
【0020】
尚、請求項9記載の前記樹脂は、請求項10記載のように、導電性樹脂又は異方性導電性樹脂であることが好ましい。
【0021】
また、例えば請求項11記載のように、請求項1から8の何れか1項に記載の前記第1及び/又は第2の圧電素子は、少なくとも1面に第1の金属膜を有し、同じく前記支持部と前記第1又は第2の腕部の少なくとも一方は、前記第1又は第2の圧電素子を接合するための第2の金属膜を有して構成されていても良い。このように各構成の接合面に第1及び第2の金属膜を形成しておくことで、両者を直接接合することが可能となり、前記第1又は第2の圧電素子を良好な導電性を有しつつ確実に固定することが可能となる。
【0022】
また、本発明は、請求項12記載のように、長手方向に対して平行で且つ互いに平行な2面を含む圧電素子で形成された少なくとも2本の第1の腕部を該第1の腕部の表面に形成された第1の電極膜を用いて振動させる振動部と、長手方向に対して平行で且つ互いに平行な2面を含む圧電素子で形成された少なくとも2本の第2の腕部に発生した振動を該第2の腕部の表面に形成された第2の電極膜を用いて検出する検出部とを有する角速度センサにおいて、前記第1及び第2の腕部と一体形成された支持部を有して構成され、この構成において、前記第1及び第2の腕部の少なくとも一方における前記支持部側の端が該第1又は第2の腕部の胴体幅よりも細くなっている。このように、腕の根元を細くすることで得られる高感度化の効果は、材料基板に圧電基板を用いて角速度センサを構成した場合でも奏することができる。
【0023】
また、本発明は、請求項13記載のように、長手方向に対して平行で且つ互いに平行な2面を含む圧電素子で形成された少なくとも2本の第1の腕部を該第1の腕部の表面に形成された第1の電極膜を用いて振動させる振動部と、長手方向に対して平行で且つ互いに平行な2面を含む圧電素子で形成された少なくとも2本の第2の腕部に発生した振動を該第2の腕部の表面に形成された第2の電極膜を用いて検出する検出部とを有する角速度センサにおいて、前記第1及び第2の腕部と一体形成された支持部と、該支持部に形成された2つ以上の穴とを有して構成される。このように、支持部に穴を設けることで得られる高感度化の効果は、材料基板に圧電基板を用いて角速度センサを構成した場合でも奏することができる。
【0024】
また、請求項14記載のように、請求項1から13の何れか1項に記載の前記第1又は第2の腕部の断面は、2本の該第1又は第2の腕部が延在する面に対して垂直で且つ該第1又は第2の腕部の長手方向と平行な面に関して面対称を成し、同じく前記第1及び第2の腕部と前記支持部とを含む振動子は、該支持部の中心に関して点対称を成しているように構成されていることが好ましい。第1及び第2の腕と支持部とで構成された振動子の対称性を確保することで、駆動側において効率良く振動を発生することが可能となる。また、この発生した振動を効率よく検出側へ伝播させることが可能となる。更に、検出した信号に重畳されるノイズも低減されるため、より高感度化を図ることが可能となる。
【0025】
また、請求項1から14の何れか1項に記載の前記角度センサは、請求項15記載のように、前記支持部と前記第1及び第2の腕部との外周に形成されたフレームと、該フレームと前記支持部とを連結して固定するトーションバーとを有し、前記トーションバーが前記支持部の厚さよりも薄く形成されていることが好ましい。このように支持部及び腕を有して構成される振動子を支持するトーションバーの剛性を支持部よりも低く構成することで、トーションバーにおける振動の減衰を極力抑えることが可能となる。
【0026】
【発明の実施の形態】
以下、本発明を好適に実施した形態について説明するにあたり、本発明の基本構成について図面を用いて詳細に説明する。尚、以下の説明では、H型圧電振動ジャイロタイプの角速度センサについて例を挙げて説明する。
【0027】
図1から図3は、本発明による角速度センサ100の基本構成を示す平面図である。尚、図1は角速度センサ100の平面図を示し、図2及び図3は、図1の線II−II及び線III−IIIに沿った断面図を示す。
【0028】
図1に示すように、角速度センサ100は、H型振動子10と、フレーム20と、これらを連結する一対のトーションバー30と、H型振動子10に設けられた駆動用圧電素子40及び一対の検出用圧電素子50,60とを有する。H型振動子10,フレーム20及びトーションバー30は、材料基板としてのシリコン基板に対して反応性イオンエッチング(RIE)又は結晶異方性エッチングを施すことによって、一体形成されたものである。具体的には、例えば厚さ500μmのシリコン基板の片面にエッチングマスクとしてのフォトレジストや金属膜をパターン形成し、当該エッチングマスクを介して基板の片面からDeep−RIEを行うことによって、或いは、基板の両面にエッチングマスクとしてのフォトレジストや金属膜をパターン形成し、当該エッチングマスクを介して基板の両面から結晶異方性エッチングを行うことによって、各部位が形成されている。尚、Deep−RIEを採用する場合、エッチングと側壁保護とを交互に行うBoschプロセスにおいて、例えば、SF6ガスによるエッチングを8秒間程度行い、C4F8ガスによる側壁保護を7秒間程度行う。この際、ウェハに印加するバイアスは20W程度とする。また、ウェットエッチングである結晶異方性エッチングを採用する場合には、エッチング液としてEPW(エチレンジアミン+ピロカテコール+水)液やKOHを用いる。
【0029】
H型振動子10は、支持部11と、これから延出する一対の第1アーム12a,12bと、第1アーム12a,12bとは反対方向へ支持部11から延出する一対の第2アーム13a,13bとを有して構成されている。即ち、第1アーム12a,12b及び第2アーム13a,13bは、支持部11に支持されるように、支持部11とモノリシックに一体形成されている。本基本構成では、例えば支持部11の長さL1を1000μm,幅L2を1100μm,厚さを上述の材料基板(例えばシリコン基板)の厚さと同じ500μmとする。一対の第1アーム12a,12bは、それぞれ長手方向(Z方向)に対して平行で且つ互いに平行な2面を含んで構成され、これらが互いに同一形状を有して平行に延びている。それぞれのアームは、例えば長さL3が2500μm,幅L4が500μm,厚さが材料基板と同じ500μmであって、互いの離隔距離L5が100μmである。同様に、一対の第2アーム13a,13bは、それぞれ長手方向(Z方向)に対して平行で且つ互いに平行な2面を含んで構成され、互いに同一形状を有して平行に延びており、例えば長さL3が2500μm,幅L4が500μm,厚さが500μmであって、互いの離隔距離L5が100μmである。H型振動子10は、図1及び図2に示すように、アーム延出方向に対して平行な対称面A1−A1を有すると共に、アーム延出方向に対して平行であって対称面A1−A1に対して直行する対称面A2−A2を有する対称性の高い形状に形成されている。
【0030】
基板材料からの一体形成において、Deep−RIEによる片面エッチングを採用すると、第1アーム12a,12b及び第2アーム13a,13bの断面形状は、図2(a)に示すように、正方形とすることができる。一方、結晶異方性エッチングによる両面エッチングを採用すると、図2(b)に示すように、六角形とすることができる。アーム断面を六角形状とする場合には、上述のアーム幅L4は表面幅を示し、第1アーム12a,12b及び第2アーム13a,13bは、表面幅L4よりも太い最大幅L4’を有するものとなる。例えば、シリコン基板の(100面)を利用して結晶異方性エッチングを行う場合、表面幅L4を500μmとすると、表面幅L4よりも約350μm程度太い最大幅L4’を有することとなる。このように、アーム断面を正方形や六角形のような対称性の高い形状とすることで、H型振動子10においてドリフトの低減を図ることが可能となる。
【0031】
一対のトーションバー30は、各々、図1に示すように、H型振動子10のアーム延出方向における中央に位置する支持部11にてH型振動子10をフレーム20に固定している。本基本構成では、例えばトーションバー30の長さL6を500μm,幅L7を500μm,厚さL8を500μmとする。トーションバー30の断面形状は、材料基板からの一体形成においてDeep−RIEによる片面エッチングを採用する場合には、図3(a)に示すように、正方形とすることができる。一方、結晶異方性エッチングによる両面エッチングを採用する場合には、図3(b)に示すように、六角形とすることができる。トーションバー断面を六角形状とする場合には、上述の幅L7は表面幅を示し、トーションバー30は、表面幅L7よりも太い最大幅L7’を有するものとする。例えば、シリコン基板の(100)面を利用して結晶異方性エッチングを行う場合、表面幅L7を500μmとすると、表面幅L7よりも約350μm程度太い最大幅L7’を有することとなる。また、例えば図3(c)に示すように、トーションバー30の断面の幅を他の構成よりも薄くすることで、第1アーム側に生じた振動を低減衰で第2アーム側へ伝播させることが可能となる。これは、例えばRIE等のエッチングを用いて加工することが可能である。このように、トーションバー30の断面形状は、強度およびセンサ性能の観点から、当該断面の中心を通って直行する2軸A3−A3,A4−A4に対して対称な形状であるのが好ましい。また、本発明においては、トーションバー30の断面をより小寸法に設計しても良い。具体的には、トーションバー30の幅L7を小さくすると共に、厚さL8を材料基板の厚さ500μmより小さくする。トーションバー30の形状は、センサ感度に多大な影響を与える。本発明において、トーションバー30の厚さを上述のように基板の厚さに対して等しいか又は薄くすることにより、トーションバー30の捩れ抵抗を低下し、その結果、H型振動子10の高感度化を達成することができる。また、トーションバー30について断面を正方形や六角形とすると共に厚みを小さくし、且つ、一対のトーションバー30の各々の重心を通る軸上に支持部11の在るH型振動子10の重心が載るようにすることによって、トーションバー30の曲げ強度を確保しつつ捩れ抵抗を下げることができると共に、H型振動子の感度を高めることができる。これらの構成によって、H型振動子10においてドリフトの低減を図ることができ、高性能な角速度センサ100を製造することが可能となる。
【0032】
本基本構成において、例えばフレーム20のアーム延出方向の長さL9を7000〜9000μmとし、幅L10を3100〜4100μmとした。また、図2(a)及び図2(b)に示すように、第1アーム12a,12b及び第2アーム13a,13bとフレーム20との離隔距離L11をトーションバー30の長さL6に等しい500μmとし、第1アーム12a,12b間の離隔距離L5を100μmとした。また、図1に示すように、第1アーム20との離隔距離L11’も500μmとした。
【0033】
駆動用圧電素子40は、図1に示すように、第1アーム12a,12bと支持部11とにより規定される又部11’、即ち、第1アーム12aと支持部11と第1アーム12bとにわたる箇所に設けられており、第1アーム12a,12bを入力された高周波振動に基づいて振動させる。即ち、駆動用圧電素子40は第1アーム12a,12bと一体となって振動の発生源(振動部)として機能する。
【0034】
駆動用圧電素子40は、下部電極41と、上部電極43と、これらに挟まれた圧電膜42とを含んだ積層構造を有する。下部電極41は、何れか一方のトーションバー30の上を通るようにパターン形成された配線71を介して駆動下部電極パッド81に接続されている。上部電極43は、もう一方のトーションバー30の上を通るようにパターン形成された配線73を介して駆動上部電極パッド83に接続されている。圧電膜42は、酸化亜鉛(ZnO),窒化アルミニウム(AlN),PZT(ペロブスカイト型の結晶構造を持つ酸化物強誘電体)等を主成分として構成される。また、電極41,43は、アルミニウム(Al),銅(Cu),金(Au)等を主成分として構成される。
【0035】
検出用圧電素子50,60は、図1に示すように、第2アーム13aと支持部11との接合部、及び、第2アーム13bと支持部11との接合部に各々設けられており、第2アーム13a,13bに発生した振動を電圧値に変換して、それぞれ出力する。即ち、検出用圧電素子50,60は、第2アーム13a又は13bと一体となって発生した振動を検出する検出部として機能する。H型振動子10において、支持部11とアームとの接合部が最も歪むので、本実施形態の検出用圧電素子50,60は、H型振動子10の振動を感度よく検出することができる。
【0036】
検出用圧電素子50は、下部電極54と、上部電極56と、これらに挟まれた圧電膜55とを含む積層構造を有する。下部電極54は、一方のトーションバー30の上を通るようにパターン形成された配線74を介して検出下部電極パッド84に接続されている。上部電極56は、同一のトーションバー30の上を通るようにパターン形成された配線76を介して検出上部電極パッド86に接続されている。また、検出用圧電素子60は、下部電極67と、上部電極69と、これらに挟まれた圧電膜68とを含んだ積層構造を有する。下部電極67は、一方のトーションバー30の上を通るようにパターン形成された配線77を介して検出下部電極パッド87に接続されている。上部電極69は、同一のトーションバー30の上を通るようにパターン形成された配線79を介して検出上部電極パッド89に接続されている。圧電膜55,68は、ZnO,AlN,PZT等を主成分として構成される。また、電極54,56,67,69は、Al,Cu,Au等を主成分として構成される。
【0037】
このような構成の角速度センサ100において、駆動用圧電素子40に対して所定の交流電圧を印加すると、圧電膜42が逆圧電効果によって伸縮し、これに起因して一対の第1アーム12a,12bが図1又は図4に示すX軸方向において、互いに逆位相で屈曲振動乃至面内振動V1,V2する(駆動モード)。これに伴い、第2アーム13a,13bも、X軸方向において、互いに逆位相で屈曲振動乃至面内振動V1,V2する。駆動において最適な印加電圧周波数は、第1アーム12a,12bの面内振動モードと略等しい周波数であり、H型振動子10のサイズ条件等によって決まるところ、上述した具体的寸法による構成例では約80kHzの交流電圧によって駆動する。これによって、H型振動子10を効率的に駆動でき、高感度の角速度センサ100を実現できる。H型振動子10を定常的に振動させた状態において、H型振動子10がZ軸回りに角速度ωで回転すると、H型振動子10は、Y軸方向即ち図1の紙面に対して垂直方向にコリオリ力F(F=−2mVω,m:振動子質量,V:振動速度)を受ける。すると、H型振動子10の屈曲振動は、振動モードが変わり、面垂直方向即ちY軸方向にも振動するようになる(検出モード)。このように振動するH型振動子10におけるY軸に垂直な面の歪みは、検出用圧電素子50,60の圧電膜55,68による圧電効果に基づいて検出され、検出用圧電素子50,60からは、コリオリ力F乃至角速度ωに比例した出力が得られる。
【0038】
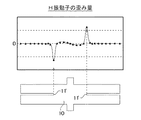
図5に、本基本構成による角速度センサ100におけるH型振動子10の部位の歪み量を示す。図5を参照すると明らかなように、H型振動子10が面内振動を行う駆動モードにおいて、最も歪みの大きな部分は、支持部11と第1アーム12a,12bとによって規定される又部11’、及び、支持部11と第2アーム13a,13bとによって規定される又部11’である。そのため、本基本構成では、図1に示すように、駆動用圧電素子40をH型振動子10の又部11’に設置し、これによって、H型振動子10の駆動を効率よく行うことができる。
【0039】
第1アーム13aに配設した検出用圧電素子50からの検出信号、及び、第2アーム13bに配設した検出用圧電素子60からの検出信号は、例えば、図6に示すような差動回路として構成された検出回路で取り出すことができる。図6に示すような差動回路によると、検知感度を向上することができると共に、外来ノイズを低減することもできる。尚、図6に示す差動回路において、図中の二点鎖線より左側の領域のゲインは1+(R2+R3)/R1で表され、二点鎖線より右側の領域のゲインはR5/R6(但し、R5=R4,R6=R7である)で表される。
【0040】
また、上述した基本構成は、例えば図7に示すように変形することも可能である。図7に示す角速度センサ100aは、図1に示す角速度センサ100と比較して、支持部11の長さL1がアームの長さL3と同程度とされている点、即ち、支持部11がアーム方向に長く構成されている点と、駆動用圧電素子40が第1アーム12a,12bの又部11’に接するように支持部11上に形成されている点とが異なる。このように構成しても、上述の角速度センサ100と同一の断面形状を有し、且つ同様な効果を得ることができる。
【0041】
〔第1の実施形態〕
次に、上述した基本構成を発展させた本発明による角速度センサを、以下に第1の実施形態として図面を用いて詳細に説明する。尚、以下の説明では、角速度センサ100aを基本として発展させた場合について例に挙げ、且つ同一の構成には同一の符号を付して説明を省略する。
【0042】
図8は、本実施形態に係る角速度センサ101の構成を示す平面図である。図1に示すように、角速度センサ101は、図1又は図7に示す角速度センサ100,100aと同様に、H型振動子10と、フレーム20とこれらを連結する一対のトーションバー30と、H型振動子10に設けられた駆動用圧電素子40及び一対の検出用圧電素子50,60とを有する。
【0043】
H型振動子10は、支持部11と、これから延出する一対の第1アーム12a,12bと、第1アーム12a,12bとは反対方向へ支持部11から延出する一対の第2アーム13a,13bとを有して構成されている。一対の第1アーム12a,12b及び第2アーム13a,13bは、互いに同一形状を有して平行に延在している。また、図8における線II−IIに沿った断面に示される各アームの断面形状は、図2に示す形状と同一である。このように、H型振動子10は、図8及び図2に示すように、アーム延出方向に対して平行な対称面A1−A1と有すると共に、アーム延出方向に対して平行であって対称面A1−A1に対して直行する対称面A2−A2を有する対称性の高い形状に形成されている。
【0044】
一対のトーションバー30は、図1と同様に、H型振動子10のアーム延出方向における中央に位置する支持部11にてH型振動子10をフレーム20に固定している。また、図8における線III−IIIに沿った断面に示される各トーションバー30の断面形状は、図3に示す形状と同一である。但し、上述にもあるように、トーションバー30について断面を正方形や六角形とすると共に厚みを小さくし、且つ、一対のトーションバー30の重心を支持部11の在るH型振動子10の重心に一致させることによって、トーションバー30の曲げ強度を確保しつつ捩れ抵抗を下げることができると共に、H型振動子の感度を高めることができる。これらの構成によって、H型振動子10においてドリフトの低減を図ることができ、高性能な角速度センサ100を製造することが可能となる。
【0045】
駆動用圧電素子40は、図7と同様に、第1アーム12a,12bと支持部11とにより規定される又部11’に接するように支持部11上に設けられており、下部電極41及び上部電極43と、これらに挟まれた圧電膜42とを含んだ積層構造を有している。破線で示す下部電極41は、何れか一方のトーションバー30の上を通るようにパターン形成された配線71を介して駆動下部電極パッド81に接続されている。上部電極は、もう一方のトーションバー30の上を通るようにパターン形成された配線73を介して駆動上部電極パッド83に接続されている。両電極41、43に挟まれた圧電膜42は、酸化亜鉛(ZnO),窒化アルミニウム(AlN),PZT(ペロブスカイト型の結晶構造を持つ酸化物強誘電体)等を主成分として構成される。尚、電極41,43は、アルミニウム(Al),銅(Cu),金(Au)等を主成分として構成される。
【0046】
検出用圧電素子50,60は、図1又は図7と同様に、第2アーム13aと支持部11との接合部、及び、第2アーム13bと支持部11との接合部に各々設けられている。検出用圧電素子50は、下部電極54及び上部電極56と、これらに挟まれた圧電膜55とを含む積層構造を有する。下部電極54は、一方のトーションバー30の上を通るようにパターン形成された配線74を介して検出下部電極パッド84に接続されている。上部電極56は、同一のトーションバー30の上を通るようにパターン形成された配線76を介して検出上部電極パッド86に接続されている。また、検出用圧電素子60は、下部電極67及び上部電極69と、これらに挟まれた圧電膜68とを含んだ積層構造を有する。下部電極67は、一方のトーションバー30の上を通るようにパターン形成された配線77を介して検出下部電極パッド87に接続されている。上部電極69は、同一のトーションバー30の上を通るようにパターン形成された配線79を介して検出上部電極パッド89に接続されている。圧電膜55,68は、ZnO,AlN,PZT等を主成分として構成される。また、電極54,56,67,69は、Al,Cu,Au等を主成分として構成される。
【0047】
このような構成において、第1アーム12a,12b及び第2アーム13a,13bの付け根には、図8に示すような溝21,22,23,24,31,32,33,34が形成されている。換言すれば、各アームの支持部11側の端(これを根元とする)がアームの胴体幅よりも細く形成されている。アームの根元を細くすることで、この部分の剛性を低下させることができる。このように、アームの根元の剛性を低下させることで、見かけ上のアームの長さが長くなり、H型振動子10の面内振動でアームが開閉する駆動モードにおけるアームのモーメントを増大させることができる。この結果、同一の共振周波数に対してアームの駆動速度V1(V2)を増加させることが達成されるため、回転角速度Ωが加わった際に発生するコリオリ力が大きくなり、角速度センサ101の高感度化を図ることができる。
【0048】
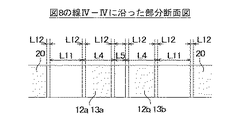
また、図8に示す線IV−IVに沿った材料基板のみの断面形状を図9に示す。図8及び図9に示すように、各アームの根元にそれぞれ深さL12の溝21〜24,31〜34が設けられている。この溝21〜24,31〜34は、H型振動子10の耐久性を鑑みて、最も深く形成されることが好ましい。例えばアームの胴体幅L4を500μmとした場合、深さL12を100μm程度とすることで、H型振動子10に要求する耐久性を満足しつつ、感度を向上させることができる。
【0049】
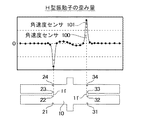
図10に、本実施形態による角速度センサ101におけるH型振動子10の各部の歪み量を示す。図10を参照すると明らかなように、H型振動子10が面内振動を行う振動モードにおいて、支持部11と第1アーム12a,12bとによって規定される又部11’、及び、支持部11と第2アーム13a,13bとによって規定される又部11’、即ち、溝21〜24,31〜34が形成された部分における歪み量が、図5に示すグラフ(溝の無い状態)と比較して、増加している。そのため、この部分に配設された検出用圧電素子50,60を介して感度良く検出を行うことが可能となったことがわかる。
【0050】
尚、第1アーム13aに配設した検出用圧電素子50からの検出信号、及び、第2アーム13bに配設した検出用圧電素子60からの検出信号は、上述と同様に、図6に示すような差動回路として構成された検出回路で取り出すことができる。
【0051】
このように一対のアームの離隔距離L5とアーム−フレーム間距離L11,L11’とが異なる設計において、図10及び図11を参照して後述するように材料基板に対するエッチングを行う際には、図11及び図12に示すように、レジストパターン116に加えてエッチング幅調整用レジストパターン116’を有するレジストパターンを用いるのが好ましい。レジストパターン116は、材料基板においてH型振動子10,フレーム20及びトーションバー30へと形成される領域をマスクするためのものである。エッチング幅調整用レジストパターン116’は、レジストパターン116から一定の間隔で形成されている。図11は、エッチング幅調整用レジストパターン116’が、レジストパターン116から独立する場合を表す。図12は、エッチング幅調整用レジストパターン116’が、その架橋部116’aを介してレジストパターン116に接続している場合を表す。例えばレジストパターン116及びエッチング幅調整用レジストパターン116’の離隔距離L12は100μmであり、一対のアームの離隔距離L5に等しい。上述のように、本実施形態では、一対のアームの離隔距離L5とフレーム−アーム間の離隔距離L11,L11’とが異なるところ、レジストパターン116に加えてエッチング幅調整用レジストパターン116’を有するレジストパターンを、図11及び図12に示すように形成することにより、各部位を形成するためのエッチングにおいてエッチングレートを同一とすることができる。その結果、フレーム20,第1アーム12a,12b,及び第2アーム13a,13bの断面形状のばらつきを適切に抑制することが可能となる。更に、このレジストパターン116に予め溝21〜24,31〜34作成用の窪み21’〜24’,31’〜34’を設けておくことで、エッチングの際に同時に溝21〜24,31〜34も形成することが可能となる。
【0052】
但し、図11に示した態様のレジストパターンを介してシリコン基板に対してエッチングを施すと、シリコン基板においてエッチング幅調整用レジストパターン116’にマスクされていた部分が、シリコン基板乃至フレーム20から分離することとなる。そのため、シリコン基板に対するエッチング終了と同時か、又は、その後の工程で、当該分離部分は、シリコン基板から外れる際に振動子を傷つける可能性がある。ここで、その後の工程とは、例えば、エッチングのストップ層としてシリコン基板の裏面(但し、H型振動子10における駆動用圧電素子40及び検出用圧電素子50,60が形成される面を表面とする)に二酸化シリコン(SiO2)膜またはレジスト膜が設けられている場合において、エッチング終了後に当該SiO2膜又はレジスト膜を除去する工程をいう。振動子に傷が付くということは、アーム形状の対称性が崩れるということであり、角速度センサの性能に影響を与える。これに対して、図12に示したマスクパターンを介してシリコン基板にエッチングを施す場合、シリコン基板においてエッチング幅調整用レジストパターン116’にマスクされていた部分は、架橋部116’aにマスクされていた部分を介してシリコン基板乃至フレーム20に固定されることとなる。そのため、エッチング終了と同時においても、その工程においても、シリコン基板においてエッチング幅調整用レジストパターン116’にマスクされていた部分は、振動子に損傷を与えることは無い。
【0053】
また、本発明では、エッチング幅調整用レジストパターン116’を用いる方法に代えて、例えば図2(c)に示すように、第1アーム12a,12b及び第2アーム13a,13bとフレームとの離隔距離L11を200μmとし、第1アーム12a,12b間の離隔距離及び第2アーム13a,13b間の離隔距離L5を200μmとし、第1アーム12a,12b及び第2アーム13a,13bの先端とフレーム20との離隔距離L11’を200μmとして、3種類の離隔距離を等しくしても良い。このような構成によると、材料基板に対するエッチングレートについて、エッチング幅調整用レジストパターン116’を用いることなく、アーム−アーム間とフレーム−アーム間とで同一とすることができる。
【0054】
次に、上述した角速度センサ101をパッケージングした場合の構成を図13を用いて説明する。図13は、図8の線II−IIに沿ってパッケージごと角速度センサ101を切断した際の断面形状を示す図である。角速度センサ101は、H型振動子10とフレーム20とがトーションバー30を介して一体形成された構造をとる。そのため、角速度センサ101のパッケージングは、図13(a)に示すように、陽極接合法や直接接合法等によって、ガラスやシリコン(Si)のパッケージング部材90aとフレーム20とを、スペーサ90bを介して接合することにより容易に行うことができる。或いは、図13(b)に示すように、ガラスやSiのパッケージング部材90aに対してRIE又はサンドブラスト加工の技術によって予め退避部90a’を形成し、このパッケージング部材90aを、陽極接合法や直接接合法等によって、角速度センサ101に接合しても良い。
【0055】
次に、本実施形態による角速度センサ101の製造方法について、図面を用いて詳細に説明する。
【0056】
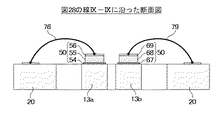
図14及び図15に、図8に示す角速度センサ101の製造方法における一部の工程の一例を示す。尚、図14及び図15では、製造工程における、図8の線IX−IXに沿った断面形状の様子を表す。また、材料基板にはシリコン基板Sを使用する。
【0057】
角速度センサ101の製造において、まず、図14(a)に示すように、シリコン基板Sに対して、熱酸化法等により、酸化シリコン(SiO2)を有してなる酸化膜121を成膜し、更に、角速度センサ101において最終的に下部電極41,54,67等にパターン形成される金属膜122を、アルミニウム(Al)等の金属材料のスパッタリング又は蒸着等により成膜する。酸化膜121の膜厚は例えば0.2μm程度であり、金属膜122の膜厚は例えば0.1μm程度である。酸化膜121は、シリコン基板Sとして抵抗率がおよそ1000Ω・cm未満の低抵抗基板を使用する場合に、完成品の角速度センサ101において不要な容量成分が発生するのを防ぐために形成されるものである。従って、シリコン基板Sとして、抵抗率がおよそ1000Ω・cm以上の高抵抗基板を使用する場合には、酸化膜121は成膜しなくともよい。
【0058】
次に、図14(b)に示すように、所定のエッチングマスクを介して、金属膜122をエッチングする。エッチングは、ドライエッチング又はウェットエッチングで行う。ウェットエッチングの場合、エッチング液としては、リン酸,酢酸,硝酸等を主成分とするものなどを使用することができる。このエッチングによって、H型振動子10に成形される領域に下部電極41,54,67がパターン形成され、フレーム20に形成される領域に下部電極パッド81,84,87がパターン形成され、且つ、これらを接続する配線71,74,77がパターン形成される。
【0059】
次に、図14(c)に示すように、シリコン基板Sに対して、ZnO,AlN,PZT等の圧電材料をスパッタリング,蒸着,又は印刷等によって、圧電薄膜123を積層形成する。圧電薄膜123の膜厚は、H型振動子10を所望の周波数で振動させるのに必要な膜厚、例えば1μm程度である。そして、図14(d)に示すように、所定のエッチングマスクを介して、当該圧電薄膜123をエッチングする。このとき、ウェットエッチングを採用する場合、エッチング液としては、酢酸水溶液等を使用することができる。このエッチングによって、下部電極41,54,67に重なる圧電膜42,55,68がパターン形成される。
【0060】
次に、図14(e)に示すように、シリコン基板Sに対して、金属膜114を、Al等の金属材料のスパッタリング又は蒸着等により成膜する。金属膜114の膜厚は例えば1μm程度である。そして、図14(f)に示すように、所定のエッチングマスクを介して、当該金属膜114をエッチングする。エッチングは、ドライエッチング又はウェットエッチングで行う。ドライエッチングの場合、エッチングガスとしては、三塩化ホウ素(BCl3)及び塩素(Cl2)の混合ガス等を使用することができる。このエッチングによって、圧電膜42,55,68に重なる上部電極43,56,69と、フレーム20に成形される領域の上部電極パッド83,86,89と、これらを接続する配線73,76,79とがパターン形成される。
【0061】
以上のようにして、シリコン基板S上において、駆動用圧電素子40、検出用圧電素子50,60、及びこれらに伴う配線構造を形成した後、図15(a)に示すように、フォトレジスト115を、シリコン基板Sに対して積層する。次に、図15(b)に示すように、露光及び現像を経てフォトレジスト115をパターニングすることで、図11又は図12に示すようなレジストパターン116を形成する。レジストパターン116は、角速度センサ101における、H型振動子10,フレーム20,及びトーションバー30に対応する平面視形態を有し、駆動用圧電素子40及び検出用圧電素子50,60を覆っている。
【0062】
次に、図15(c)に示すように、レジストパター116を介して、シリコン基板Sを貫通するまで、Deep−RIEを行う。これによって、H型振動子10と、フレーム20と、トーションバー30とが一体形成される。且つ、この際、溝21〜24,31〜34も一緒に形成される。この後、図15(d)に示すように、レジストパターン116を除去することによって、H型振動子10と、フレーム20と、トーションバー30とが一体となって、H型振動子10上に駆動用圧電素子40及び検出用圧電素子50,60が設けられた角速度センサ101が完成する。但し、本発明では、図15(b)に示す工程において、図11又は図12を参照して上述したように、レジストパターン116と共にエッチング幅調整用レジストパターン116’を形成しても良い。これによって、図15(c)に示す工程において、Deep−RIEによる各エッチング箇所のエッチングレートを同一とすることができる。
【0063】
図15では、図9に示す一連の工程の後における、H型振動子10,フレーム20,及びトーションバー30の一体形成に際して、片面エッチングを採用する場合の工程を表した。本実施形態では、これに代えて、以下のような両面エッチングを採用することもできる。両面エッチングにおいては、まず、図14に示す一連の工程の後に、図15(a)及び図15(b)を参照して説明した工程を経て、図16(a)に示すような状態とする。即ち、シリコン基板Sに対してフォトレジスト115を積層し、露光及び現像を経てレジストパターン116を形成する。次に、図16(b)に示すように、レジストパターン116を介して、シリコン基板Sの中間位置まで、ウェットエッチングである結晶異方性エッチングを行う。これによって、H型振動子10と、フレーム20と、トーションバー30との基板上位半分が形成されたこととなる。
【0064】
次に、図16(c)に示すように、シリコン基板Sに対してフォトレジスト117を積層する。次いで、図16(d)に示すように、露光及び現像を経て、フォトレジスト117をパターニングしてレジストパターン118を形成する。次に、図16(e)に示すように、レジストパターン118を介して、シリコン基板Sの中間位置にて貫通するまで、結晶異方性エッチングを行う。これによって、H型振動子10と、フレーム20と、トーションバー30とが一体形成される。この後、図16(f)に示すように、レジストパターン116,118を除去することによって、H型振動子10と、フレーム20と、トーションバー30とが一体となって、H型振動子10上に駆動用圧電素子40及び検出用圧電素子50,60が設けられた角速度センサ101が完成する。但し、本発明では、図16(a)及び図16(b)に示す工程において、図11又は図12を参照して上述したように、レジストパターン116,118と共にエッチング幅調整用レジストパターンを形成してもよい。これによって、図16(b)及び図16(e)に示す工程において、結晶異方性エッチングによる各エッチング箇所のエッチングレートを同一とすることができる。
【0065】
また、以上の製造方法では、スパッタリング又は蒸着法等を用いて駆動用圧電素子40及び検出用圧電素子50,60を形成する場合を例に挙げていた。本実施形態では、これに代えて、駆動用圧電素子40及び検出用圧電素子50,60を形成する領域に導電性の樹脂を塗布し、これにバルクのPZT等の圧電体(圧電膜42,55,68)を接着するように構成することも可能である。この際、塗布しておいた導電性の樹脂は、下部電極41,54,67として機能する。また、圧電膜42,55,68には予め上部電極43,56,69を形成しておくと良い。このほか、下部電極41,54,67を上述と同様にスパッタリング又は蒸着法等で形成し、且つ、圧電体(圧電膜42,55,68)における下部電極41,54,67との接着面に金属膜を形成しておき、両者を直接接合により接合するように構成することも可能である。この際、同様に、圧電膜42,55,68には予め上部電極43,56,69を形成しておくと良い。
【0066】
また、以上では、H型振動子10とフレーム20とトーションバー30とを一体形成する場合について例を挙げたが、本実施形態では、これに限定されず、例えば図17に示すように、H型振動子10及びトーションバー30と、フレーム20とを個別に形成し、これらを接合することで、角速度センサ101を作製することも可能である。
【0067】
更に、本実施形態では、図7に示すような、駆動用圧電素子40が又部11’に接する支持部11上に形成された角速度センサ100aを発展させた場合を例に挙げたが、歪みが最も発生する部位を考慮した場合、図1に示すような、駆動用圧電素子40が又部11’の側端を取り囲むように形成された角速度センサ100に適用することもできる。この場合の構成及び製造方法は、上述より容易に想到し得るため、ここでは説明を省略する。
【0068】
〔第2の実施形態〕
次に、本発明の第2の実施形態について図面を用いて詳細に説明する。尚、以下の説明において、上述と同一の構成には、同一の符号を付して説明を省略する。
【0069】
図18は、本実施形態に係る角速度センサ102の構成を示す平面図である。図18に示すように、角速度センサ102は、図1,図7及び図8に示す角速度センサ100,100a,101と同様に、H型振動子10と、フレーム20とこれらを連結する一対のトーションバー30と、H型振動子10に設けられた駆動用圧電素子40及び一対の検出用圧電素子50,60とを有する。
【0070】
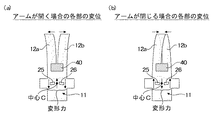
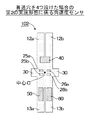
この構成において、本実施形態では、第1の実施形態における溝21〜24,31〜34の代わりに、貫通穴25,26が設けられている。この貫通穴25,26は、支持部11の剛性をH型振動子10の中心(=支持部11の中心)に対して点対称に低減させ、支持部11にバネ性を持たせるための構成である。即ち、H型振動子10の中心に点対称に1つ以上の貫通穴25,26を設けることで、支持部11の剛性が対称性良く低下する。貫通穴25,26の寸法は、例えばアームの延在方向と垂直方向の長さL13を300μm程度とし、アームの延在方向の長さL14を100μm程度とする。このような貫通穴25,26を複数設けることにより、駆動用圧電素子40による歪み量及び検出用圧電素子50,60に入力される変位量が増加し、角速度センサ102の感度を向上させることが可能となる。
【0071】
これを図19を用いて詳細に説明する。尚、図19では、H型振動子10の第1アーム12a,12b及び支持部11にのみ着目し、且つ第1アーム12a,12bが開く若しくは閉じる場合を例に挙げて説明する。図19(a)に示すように、アームを駆動用圧電素子40を用いて開いた場合、若しくは、図19(b)に示すように、アームを閉じた場合、支持部11には図示するような変形力が加わる。この変形力は、支持部11の中央(対称面A1−A1が延在する位置を中央とする)付近と外側付近とで相反する方向へ働いている。支持部11の剛性が高いと、生じた変形力により変形する量(変形量)が少ない。このため、検出用圧電素子50,60に入力する変位量も小さい。そこで、本実施形態のように、H型振動子10の中心Cに対して対称に複数の貫通穴25,26を設けて支持部11の剛性を低下させる。これにより、支持部11中央と外側との変位量が大きくなる。即ち、検出用圧電素子50,60に入力する変位量が大きくなり、結果として、角速度センサ102の感度を向上させることができる。但し、支持部11の中央及び外側付近貫通穴を設けた場合、発生した変形力が減衰してしまう。このため、支持部11における中央側と外側との相対する変位を有効に生み出すために、貫通穴25,26を設ける位置は、支持部11の中央及び外側以外の領域とすることが好ましい。尚、他の構成は、上述した第1の実施形態と同様であるため、ここでは説明を省略する。
【0072】
また、参考として、貫通穴を点対称に2つ以上、例えば4つ(25a,25b,26a,26b)設けた場合のH型振動子10の概略構成を図20の平面図に示す。
【0073】
また、本実施形態による角速度センサ102の製造方法では、例えば図21又は図22に示すような、貫通穴25,26を形成するための穴25’,26’を有するレジストパターン116が用いられる。このほかの工程は、上述した第1の実施形態と同様であるため、ここでは説明を省略する。
【0074】
〔第3の実施形態〕
次に、本発明の第3の実施形態について図面を用いて詳細に説明する。上記した基本構成では、駆動用圧電素子40と検出用圧電素子50,60とをH型振動子10における表面(又は裏面)であって同一面上に形成していた。本発明では、これに限らず、例えば駆動用圧電素子40及び/又は検出用圧電素子50,60を第1アーム12a,12b又は第2アーム13a,13bの胴体側面であって、これらが配置された面と垂直を成す面(これを側面とする)に形成することも可能である。以下、これを第3の実施形態として例を挙げて説明する。但し、以下の説明では、駆動用圧電素子40を側面に形成した場合を例に挙げて説明する。
【0075】
図23は、本実施形態による角速度センサ103の構成を示す平面図である。図23に示すように、角速度センサ103における駆動用圧電素子40a,40b,40c,40dは、各々の第1アーム12a,12bの両側面に形成される。
【0076】
上述において例えば図4又は図19を用いて説明したように、駆動モードにおける第1アーム12a,12bの側面は、印加された高周波信号に基づいて伸縮を繰り返す。従って、圧電定数d31(pC/N)を有効に使うために、アームの側面にd31が大きな圧電素子を成膜する。これにより、効率良くアームを駆動させることが可能となる。ここで、図23における線VI−VIに沿った断面構成を図24(a)に示す。
【0077】
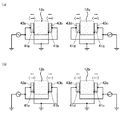
図24(a)に示すように、第1アーム12aの外側の側面には、下部電極43aと圧電膜42aと上部電極41aとが積層された駆動用圧電素子40aが形成され、内側の側面には、同じく、下部電極43bと圧電膜42bと上部電極41bとが積層された駆動用圧電素子40bが形成されている。また、第1アーム12bも同様に、外側の側面に下部電極43aと圧電膜42aと上部電極41aとが積層された駆動用圧電素子40aが形成され、内側の側面に下部電極43bと圧電膜42bと上部電極41bとが積層された駆動用圧電素子40bが形成されている。それぞれの下部電極及び上部電極は、同一のアームに関わる2つ(上部電極及び下部電極、又は、上部電極/下部電極同士)が1組となってフレーム20上に設けられた電極パッド83a,83c又は電極パッド81a,81cに接続される。例えば図25(a)では、アーム毎において、上部電極同士又は下部電極同士を共通に接続した場合の回路構成を示し、また、図25(b)では、アーム毎において、異なる駆動用圧電素子間の上部電極及び下部電極をそれぞれ共通に接続した場合の回路構成を示す。図25中の矢印は分極方向を示す。尚、図23では、アーム毎において、上部電極同士又は下部電極同士を共通に接続した場合の構成を示している。更に、図23では、ボンディングされた金(Au)や銅(Cu)やアルミニウム(Al)等のワイヤ71a’,71b’,71c’,71d’,73a’,73b’,73c’,73d’を介して各電極と電極パッドとが相互に接続されている。
【0078】
一方、検出モードは、駆動振動と直行する方向に振動を行うモードであるので、アームの表裏面が伸縮を繰り返す。従って、圧電定数d31(pC/N)が大きな圧電素子を第2アーム13a,13bの表裏面に成膜することで、効率よく検出信号を得ることが可能となる。ここで、図23における線VII−VIIに沿った断面形状を図24(b)に示す。
【0079】
図24(b)に示すように、第2アーム13a(13b:以下、13b側を括弧付きで説明する)の何れか一方の主面(これを表面とする)には、下部電極54a(67a)と圧電体55a(68a)と上部電極56a(69a)とが積層された検出用圧電素子50a(60a)が形成されている。また、第2アーム13a(13b)の裏面には、下部電極54b(67b)と圧電体55b(68b)と上部電極56b(69b)とが積層された検出用圧電素子50b(60b)が形成されている。即ち、本実施形態において第2アーム13a(13b)には、2つの検出用圧電素子50a,50b(60a,60b)が表裏面にそれぞれ形成されている。
【0080】
このような検出回路側の回路構成は、分極方向との組み合わせより多数のパターンが考えられる。このなかで、差動検出により外来ノイズを極力抑えるように構成した場合の回路構成を図26に示す。図26中の矢印は分極方向を示す。このように第2アーム13a,13bを挟み込むように形成した検出用圧電素子50a及び50b,60a及び60bから出力される信号を差動信号として使用することで、S/N比を向上させ、結果として検出感度を向上させることが可能となる。尚、図26(a)は、アーム毎において、上部電極同士又は下部電極同士を共通に接続した場合の回路構成を示し、また、図26(b)では、アーム毎において、異なる駆動用圧電素子間の上部電極及び下部電極をそれぞれ共通に接続した場合の回路構成を示す。
【0081】
本実施形態による検出用圧電素子50a,50b,60a,60bは、第1の実施形態で説明した検出用圧電素子50,60の製造工程を、シリコン基板Sの表裏面に対して行うことで形成できる。また、駆動用圧電素子40a,40b,40c,40dは、例えば駆動用圧電素子を形成する領域に導電性の樹脂を塗布し、これにバルクのPZT等の圧電体(圧電膜42a、42b、42c、42d)を接着するように構成することも可能である。この際、塗布しておいた導電性の樹脂は、下部電極41a,41b,41c,41dとして機能する。また、圧電膜42a,42b,42c,42dには予め上部電極43a,43b,43c,43dを形成しておくと良い。このほか、下部電極41a,41b,41c,41dを上述と同様にスパッタリング又は蒸着法等で形成し、且つ、圧電体(圧電膜42a,42b,42c,42d)における下部電極41a,41b,41c,41dとの接着面に金属膜を形成しておき、両者を直接接合により接合するように構成することも可能である。この際、同様に、圧電膜42a,41b,41c,41dには予め上部電極43a,43b,43c,43dを形成しておくと良い。
【0082】
また、本実施形態では、1つのアームにおいて、対向する平行な2面にそれぞれ駆動用圧電素子又は検出用圧電素子を形成したが、本発明ではこれに限定されず、例えば第1アーム12a,12bの外側の面にだけ、駆動用圧電素子(40a,40c)を形成する構成としても、1つのアームに駆動用圧電素子と検出用圧電素子との双方を形成する構成としても良い。
【0083】
以上のように構成することで、圧電体の圧電定数d31を有効に活用することが可能となり、アームの駆動効率及び検出回路での検出感度を向上させることが可能である。尚、他の構成及び製造方法については、上述した第1の実施形態と同様であるため、ここでは説明を省略する。
【0084】
〔第4の実施形態〕
また、上述の第1の実施形態における溝21〜24,31〜34の他の構成例を以下に第2の実施形態として図面を用いて詳細に説明する。図27(a)は、本実施形態による角速度センサ104の第1アーム12a,12bの付け根部分を拡大した部分上面図である。また、図27(a)の線IV−IVに沿った断面形状を(b)に示す。
【0085】
図27(a)及び(b)に示すように、本実施形態による溝27a,27bは、第1アーム12a,12bの付け根部分を外周するように形成されている。この溝27a,27bの深さL12は、例えば均一で、第1の実施形態における溝21〜24,31〜34の深さと同じである。これにより、この部分の剛性が低下し、角速度センサ104の感度をより向上させることが可能となる。尚、本実施形態では、同様の溝が第2アーム13a,13bの付け根部分にも形成される。
【0086】
このような溝27a,27b(但し、第2アーム側に形成する溝も含む)は、第1の実施形態における図15(c)で示した工程の後又は前に、表面及び裏面に形成する溝部分に対応する領域が開口されたフォトレジストを形成し、この開口部分を深さを制御しつつエッチングすることで形成される。尚、他の構成及び製造方法は、上述した第1の実施形態と同様であるため、ここでは説明を省略する。
【0087】
〔第5の実施形態〕
また、本発明を好適に実施した第5の実施形態を以下に図面を用いて詳細に説明する。但し、本実施形態では上述の第1の実施形態による角速度センサ101を基礎とした形態について例を挙げて説明する。
【0088】
図28は、本発明の第5の実施形態に係る角速度センサ105の平面図である。図29は、図28の線XIII−XIIIに沿った断面図である。角度センサ105は、駆動用圧電素子40,検出用圧電素子50,60、及び配線構造の一部の形態において、下部電極41と、上部電極43と、これらに挟まれた圧電体42’とを含む積層構造を有する。圧電体42’は、100μm程度の厚みを有する。下部電極41は、一方のトーションバー30の上を通ってパターン形成された配線71を介して駆動下部電極パッド81に接続されている。上部電極43は、ワイヤ73’を介して駆動上部電極パッド83に接続されている。ワイヤ73’は例えば金で構成される。圧電体42’は、ZnO,AlN,PZT等によって構成される。また、電極41,43は、Al,Cu,Au等によって構成される。但し、本発明においては、駆動用圧電素子40の圧電体42’と下部電極41との間に、圧電素子の下部電極の一部として、更に、Al,Cu,Au等により構成される金属膜を介在させても良い。
【0089】
検出用圧電素子50は、下部電極54と、上部電極56と、これらに挟まれた圧電体55’とを含む積層構造を有する。下部電極54は、一方のトーションバー30の上を通ってパターン形成された配線74を介して検出下部電極パッド84に接続されている。上部電極56は、例えば金を含んで構成されたワイヤ76’を介して検出上部電極パッド86に接続されている。また、検出用圧電素子60は、下部電極67と、上部電極69と、これらに挟まれた圧電体68’とを含む積層構造を有する。下部電極67は、一方のトーションバー30の上を通ってパターン形成された配線77を介して検出下部電極パッド87に接続されている。上部電極69は、例えば金を含むワイヤ79’を介して検出上部電極パッド89に接続されている。圧電体55’,68’は、100μm程度の厚みを有し、ZnO,AlN,PZT等を含んで構成される。また、電極54,56,67,69は、Al,Cu,Au等を含んで構成される。但し、本発明において、検出用圧電素子50の圧電体55’と下部電極54との間に、圧電素子の下部電極の一部として、更に、Al,Cu,Au等を含んで構成される金属膜を介在させても良い。同様に、検出用圧電素子60の圧電体68’と下部電極67との間に、圧電素子の下部電極の一部として、更に、Al,Cu,Au等を含んで構成される金属膜を介在させても良い。また、本発明では、フレーム20上に設けられた上部電極パッド83,86,89を有しない構造を採用することもできる。その場合、上部電極43,56,69に接続するワイヤ73’,76’,79’の一端は、角速度センサ105のための駆動回路又は検出回路に対して直接に接続される。
【0090】
このような構成の角速度センサ105において、駆動用圧電素子40に対して所定の交流電圧を印加すると、圧電体42’が逆圧電効果によって伸縮する。これに起因して、H型振動子10における一対の第1アーム12a,12b及び一対の第2アーム13a,13bは、図28におけるX軸方向において面内振動V1,V2する。このようにH型振動子10を定常的に振動させた状態において、H型振動子10がZ軸回りに角速度ωで回転すると、H型振動子10の振動モードは変わり、H型振動子10は面垂直方向即ちY軸方向にも振動するようになる。H型振動子10におけるY軸に垂直な面の歪みは、検出用圧電素子50,60の圧電体55’,68’による圧電効果に基づいて検出され、検出用圧電素子50,60からは、角速度ωに比例した出力が得られる。検出用圧電素子50,60からの検出信号は、例えば図6に示すような検出回路で取得することができる。
【0091】
角速度センサ105の有する駆動用圧電素子40及び検出用圧電素子50,60の圧電体42’,55’,68’は、角速度センサ101における圧電膜42,55,68よりも分厚く、従って圧電定数の大きなものが得られ易い。このような駆動用圧電素子40及び検出用圧電素子50,60を備えているため、圧電定数の観点から、角速度センサ105は角速度センサ101よりも高性能化を図ることが可能である。尚、他の構成、例えば第1アーム12a,12b及び第2アーム13a,13bの根元に設けられた溝21〜24,31〜34の構成は、第1の実施形態と同様であり、これから得られる効果も同様であるため、ここでは説明を省略する。
【0092】
次に、図30及び図31を用いて角速度センサ105の製造方法の一例を示す。図30及び図31は、製造工程における、図28の線XIII−XIIIに沿った断面形状の様子を表す。まず、図30(a)に示すように、シリコン基板Sに対して、熱酸化法等により酸化膜121を成膜し、更に、角速度センサ105において最終的に下部電極41,54,67等にパターン形成される金属膜122を成膜する。但し、シリコン基板Sとして抵抗率がおよそ1000Ω・cm以上の高抵抗基板を使用する場合には、酸化膜121は成膜しなくとも良い。次に、図30(b)に示すように、所定のエッチングマスクを介して、金属膜122をエッチングする。このエッチングによって、H型振動子10に成形される領域に下部電極41,54,67がパターン形成され、フレーム20に成形される領域に下部電極パッド81,84,87がパターン形成され、且つ、これらを接続する配線71,74,77がパターン形成される。このとき、フレーム20に成形される領域には、上部電極パッド83,86,89も形成される。酸化膜121及び金属膜122について、構成材料、成膜手段及びエッチング手法は、図14(a)及び図14(b)を参照して第1の実施形態に係る角速度センサ101に関して上述したのと同様である。
【0093】
次に、図30(c)に示すように、フォトレジスト115を、シリコン基板Sに対して積層する。次に、図30(d)に示すように、露光及び現像を経てフォトレジスト115をパターニングしてレジストパターン116を形成する。レジストパターン116は、角速度センサ105における、H型振動子10,フレーム20,及びトーションバー30に対応する平面視形態を有し、下部電極41,54,67、下部電極パッド81,84,87、これらを連結する配線71,74,77、及び上部電極パッド83,86,89を覆っている。更に、第1の実施形態と同様に、レジストパターン116には溝21〜24,31〜34を形成するための窪み21’〜24’,31’〜34’も含まれている。
【0094】
次に、図31(a)に示すように、レジストパターン116を介して、シリコン基板Sを貫通するまでDeep−RIEを行う。これによって、角速度センサ105における、H型振動子10と、フレーム20と、トーションバー30とが一体成形される。この後、図31(b)に示すように、レジストパターン116を除去する。
【0095】
次に、図31(c)に示すように、予め上部電極43,56,69が貼り合わされている圧電体42’,55’,68’を、下部電極41,54,67上に形成する。例えば圧電体42’,55’,68’を下部電極41,54,67上に接着する場合には、導電性接着剤が用いられる。予め上部電極43,56,69が貼り合わされている圧電体42’,55’,68’は、バルクの圧電材料の所定面に金属膜を成膜した後に所望の形状に加工することによって用意される。圧電体42’,55’,68’は、ZnO,AlN,PZT等を含んで構成され、100μm程度の厚みを有する。上部電極43,56,69は、Al,Cu,Au等のスパッタリングや蒸着により圧電体42’,55’,68’上に成膜されたものである。下部電極41,54,67上への形成の後、圧電体42’,55’,68’と、H型振動子10上に予め形成されていた下部電極41,54,67との間に圧電を印加することによって行う。
【0096】
圧電体42’,55’,68’には、上部電極43,56,69の成膜と共に、上部電極43,56,69とは反対側に、下部電極の一部としての金属膜を成膜しても良い。そのような圧電体42’,55’,68’は、圧電材料の所定の2面に金属膜を成膜した後に所望の形状に加工することによって用意される。この場合、圧電体42’,55’,68’を下部電極41,54,67上に設ける前に、圧電体42’,55’,68’に対する分極処理を行うことができる。この分極処理は、上部電極43,56,69と、これとともに形成された金属膜との間に圧電を印加することによって行う。分極処理の後、圧電体42’,55’,68’を前述の金属膜を介して下部電極41,54,67上に設ける。例えば導電性接着剤を用いることによって、圧電体42’,55’,68’を前述の金属膜を介して下部電極41,54,67上に形成することができる。
【0097】
次に、図31(d)に示すように、上部電極43,56,69と、これに対応する上部電極パッド83,86,89とを、例えば金を含むワイヤ73’,76’,79’のワイヤボンディング等により接続する。これによって、H型振動子10と、フレーム20と、トーションバー30とが一体となって、H型振動子10上に駆動用圧電素子40および検出用圧電素子50,60が設けられた角速度センサ105が完成する。但し、本実施形態では、図30(d)に示す工程において、図11及び図12を参照して上述したように、レジストパターン116と共にエッチング幅調整用レジストパターン116’を形成しても良い。これによって、図31(a)に示す工程において、Deep−RIEによる各エッチング箇所のエッチングレートを同一とすることができる。また、H型振動子10とフレーム20とトーションバー30とを一体成形する際、第1の実施形態の角速度センサ101の製造方法における図16(d)に示す工程にて示した結晶異方性エッチングによる両面エッチングを採用しても良い。
【0098】
尚、上述では、第1の実施形態を基礎として説明したが、このほか、例えば第2又は第3の実施形態を基礎として、本実施形態を実現することも可能である。
【0099】
〔第6の実施形態〕
次に、本発明の第6の実施形態について図面を用いて詳細に説明する。但し、本実施形態では、図1に示す基本構成を利用した第1の実施形態を基礎とした概略形態について例を挙げて説明する。
【0100】
図32は、本実施形態に係る角速度センサ106の構成を示す平面図である。角速度センサ106は、検出用圧電素子の配設態様が角速度センサ101と異なる。具体的には、検出用圧電素子70が、支持部11と第1アーム12aとの接合部に設けられ、検出用圧電素子80が、支持部11と第1アーム12bとの接合部に設けられている。検出用圧電素子70,80は、各々検出用圧電素子50,60と同様な積層構造を有しており、H型振動子10の対称面A1−A1について対称に配設されている。これによって、H型振動子10の振動バランスを保つことができるので、長期間にわたってドリフトの増大を防ぎ、角速度センサ106の信頼性を確保することが可能となる。他の構成については、角速度センサ101に関して上述したのと同様であるため、ここでは説明を省略する。尚、説明の簡略化のため、配線構造は省略する。また、上述のように、H型振動子10においては、支持部11とアームの接合部が最も歪むので、本実施形態の検出用圧電素子の配設態様によっても、角速度センサ101と略同様に角速度を検出することが可能である。尚、本実施形態の駆動用圧電素子40及び検出用圧電素子70,80は、第5の実施形態に係る分厚い圧電体を用いて構成しても良い。
【0101】
〔第7の実施形態〕
次に、本発明の第7の実施形態について図面を用いて詳細に説明する。但し、本実施形態では、図1に示す基本構成を利用した第1の実施形態を基礎とした概略形態について例を挙げて説明する。
【0102】
図33は、本実施形態に係る角速度センサ107の構成を示す平面図である。角速度センサ107は、駆動用圧電素子及び検出用圧電素子の配設態様が角速度センサ101と異なる。具体的には、支持部11と第1アーム12a,12bとの接合部には、一対の検出用圧電素子70,80が設けられており、支持部11と第2アーム13a,13bとの接合部には、第2アーム13aと支持部11と第2アーム13bとにわたって駆動用圧電素子40’が設けられると共に、一対の検出用圧電素子70’,80’が設けられている。検出用圧電素子70及び検出用圧電素子70’は、H型振動子10の対称面A1−A1について、検出用圧電素子80及び検出用圧電素子80’に対して対称に配設されている。これと共に、駆動用圧電素子40’及び検出用圧電素子70’,80’は、対称面A1−A1に直行する面A5−A5について、駆動用圧電素子40及び検出用圧電素子70,80に対して対称に配設されている。これによって、H型振動子10の振動バランスは均一に保たれている。他の構成については、角速度センサ101に関して上述したのと同様であるため、ここでは説明を省略する。尚、説明の簡略化のため、配線構造は省略する。また、上述のように、H型振動子10においては、支持部11とアームの接合部とが最も歪むので、本実施形態の検出用圧電素子の配設態様によっても、角速度センサ101と略同様に角速度を検出することが可能である。尚、本実施形態の駆動用圧電素子40,40’及び検出用圧電素子70,70’,80,80’は、第5の実施形態に係る分厚い圧電体を用いて構成しても良い。
【0103】
〔第8の実施形態〕
次に、本発明の第8の実施形態について図面を用いて詳細に説明する。但し、本実施形態では、図1に示す基本構成を利用した第1の実施形態を基礎とした概略形態について例を挙げて説明する。
【0104】
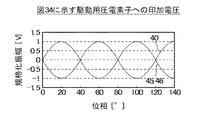
図34は、本実施形態に係る角速度センサ108の構成を示す平面図である。角速度センサ108は、駆動用圧電素子の配設態様が角速度センサ101と異なる。具体的には、駆動用圧電素子40に加えて、駆動用圧電素子45,46が、支持部11と第1アーム12a,12bとの接合部に設けられている。駆動用圧電素子40,45,46は、H型振動子10の対称面A1−A1について対称に配設され、H型振動子10のバランスが保たれている。他の構成については、角速度センサ108の駆動に際しては、駆動用圧電素子40と駆動用圧電素子45,46とに対して、各々、図35に示すような逆位相の電位信号を印加することによって、各々の圧電素子の振動乃至伸縮を逆位相にし、各アームの面内方向の振動量を、単一の駆動用圧電素子40によって駆動される角速度センサ101に比べて大きくすることができる。これによって、角速度センサ108の感度が向上し、高性能化が図られる。他の構成については、角速度センサ101に関して上述したのと同様であるため、ここでは説明を省略する。尚、説明の簡略化のため、配線構造は省略する。また、本実施形態の駆動用圧電素子40,45,46及び検出用圧電素子50,60は、第5の実施形態に係る分厚い圧電体を用いて構成しても良い。
【0105】
〔第9の実施形態〕
次に、本発明の第9の実施形態について図面を用いて詳細に説明する。但し、本実施形態では、図1に示す基本構成を利用した第1の実施形態を基礎とした概略形態について例を挙げて説明する。
【0106】
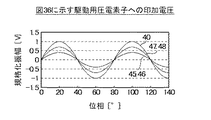
図36は、本実施形態に係る角速度センサ109の構成を示す平面図である。角速度センサ109は、駆動用圧電素子の配設態様が角速度センサ101と異なる。具体的には、駆動用圧電素子40に加えて、駆動用圧電素子45,46,47,48が、支持部11と第1アーム12a,12bとの接合部に設けられている。駆動用圧電素子40,45,46,47,48は、H型振動子10の対称面A1−A1について対称に配設され、H型振動子10のバランスが保たれている。他の構成については、角速度センサ101に関して上述したのと同様である。角速度センサ109の駆動に際しては、駆動用圧電素子40,45,46,47,48に対して、各々、図37に示すような振幅の異なる電位信号を印加することによって、各々の圧電素子の振動乃至伸縮の歪みの大きさを代え、各アームの面内方向の振動量を、単一の駆動用圧電素子40によって駆動される角速度センサ101に比べて、大きくすることができる。その結果、角速度センサ109の感度が向上し、高性能化が図られる。他の構成については、角速度センサ101に関して上述したのと同様であるため、ここでは説明を省略する。尚、説明の簡略化のため、配線構造は省略する。また、本実施形態の駆動用圧電素子40,45,46,47,48及び検出用圧電素子50,60は、第5の実施形態に係る分厚い圧電体を用いて構成しても良い。
【0107】
〔第10の実施形態〕
次に、本発明の第10の実施形態について図面を用いて詳細に説明する。但し、本実施形態では、図1に示す基本構成を利用した第1の実施形態を基礎とした概略形態について例を挙げて説明する。
【0108】
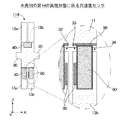
図38は、本実施形態に係る角速度センサ110の構成を表す。図38(a)は角速度センサ110の平面図であり、図38(b)は図38(a)の線B2−B2から見た矢視図である。角速度センサ110は、角速度センサ101の第1アーム12a,12b及び第2アーム13a,13bの各々の先端に嵩高部91が形成された構成をとる。嵩高部91は、H型振動子10の対称面A1−A1及び対称面A2−A2について対称に配設されて、H型振動子10のバランスが保たれ、これによって、H型振動子10の雑音モード等が防がれている。他の構成については、角速度センサ101に関して上述したのと同様であるため、ここでは説明を省略する。尚、説明の簡略化のため、配線構造は省略する。このように、H型振動子10のアームの先端形状をアームの基礎部分よりも大きくすることにより、大きなコリオリ力を発生させることができる。すると、検出モードにおけるアームの振動変位量が大きくなり、角速度センサ110の高感度化が図られる。尚、本実施形態の駆動用圧電素子40及び検出用圧電素子50,60は、第5の実施形態に係る分厚い圧電体を用いて構成しても良い。
【0109】
〔第11の実施形態〕
次に、本発明の第11の実施形態について図面を用いて詳細に説明する。但し、本実施形態では、図1に示す基本構成を利用した第1の実施形態を基礎とした概略形態について例を挙げて説明する。
【0110】
図39は、本発明の第11の実施形態に係る角速度センサ111を表す。図39(a)は角速度センサ111の平面図であり、図39(b)は図39(a)の線B3−B3から見た矢視図である。角速度センサ111は、角速度センサ101の第1アーム12a,12b及び第2アーム13a,13bの各々の先端に重り部92が設けられていた構成をとる。重り部92は、H型振動子10の対称面A1−A1について対称に配設され、これによってH型振動子10のバランスが保たれている。また、図示していないが、表裏面に対称に重り部を配設すれば更なるバランス確保に伴うドリフトの向上および感度向上が可能であることは言うまでも無い。他の構成については、角速度センサ101に関して上述したのと同様であるため、ここでは説明を省略する。尚、説明の簡略化のため、配線構造は省略する。このように、H型振動子10のアーム先端部に重り部92を設けると、H型振動子10の振動時に、アームに対してより大きなコリオリ力が発生する。すると、検出モードにおけるアームの振動変位量が大きくなり、角速度センサ111の高感度化を図ることができる。尚、本実施形態の駆動用圧電素子40及び検出用圧電素子50,60は、第5の実施形態に係る分厚い圧電体を用いて構成しても良い。
【0111】
〔第12の実施形態〕
次に、本発明の第12の実施形態について図面を用いて詳細に説明する。但し、本実施形態では、図1に示す基本構成を利用した第1の実施形態を基礎とした概略形態について例を挙げて説明する。
【0112】
図40は、本実施形態に係る角速度センサ112の構成を示す平面図である。角速度センサ112は、角速度センサ101とは異なるH型振動子10’を備える。具体的には、H型振動子10’は、支持部11と、当該支持部11よりも短い第1アーム12a,12b及び第2アーム13a,13bとを備える。より具体的には、例えば本実施形態の支持部11の長さL1は3000μmであり、アームの長さL3は1500μmである。支持部11の長さをアーム長さL3以上にすることで、H型振動子10の支持部11において、捩れ振動が少ない部位が増加し、これによってトーションバー30の形成が容易となる。即ち、支持部11がアーム長に対して長いことから、トーションバー30を大きくすることができ、実質的な機械的強度を増加させて信頼性を向上させることができる。具体的には、本実施形態では、トーションバー30の幅L7は800μmである。尚、他の構成については、角速度センサ101に関して上述したのと同様であるため、ここでは説明を省略する。尚、説明の簡略化のため、配線構造は省略する。また、他の実施形態の駆動用圧電素子40及び検出用圧電素子50,60は、第5の実施形態に係る分厚い圧電体を用いて構成してもよい。
【0113】
〔第13の実施形態〕
図41は、本発明の第13の実施形態に係る角速度センサ113を表す。角速度センサ113では、センサ部113aと回路部113bとが一体となっている。センサ部113aは角速度センサ101と同一の構成である。回路部113bは、センサ部113aの駆動用圧電素子40を駆動するための駆動回路93,及び、センサ部113aの検出用圧電素子50,60からの信号を検出するための、例えば図6に示したような検出回路94が形成されている。より具体的には、H型振動子10,フレーム20及びトーションバー30を形成する際のシリコン基板として、駆動回路93及び検出回路94を形成するための領域を有するものを用意し、当該シリコン基板に対して、図14〜図16を参照して説明したようにH型振動子10,フレーム20及びトーションバー30を形成する。これとともに、駆動回路93及び検出回路94並びにこれらを駆動用圧電素子40及び検出用圧電素子50,60に接続するために必要な配線構造を形成する。このような一体構成により、センサ部113aに対する駆動回路93及び検出回路94の配設が容易化される。尚、本実施形態の駆動用圧電素子40及び検出用圧電素子50,60は、第5の実施形態に係る分厚い圧電体を用いて構成しても良い。
【0114】
〔第14の実施形態〕
次に、本発明の第14の実施形態について図面を用いて詳細に説明する。図42は、本実施形態による角速度センサ114の構成を示す平面図(左側)及び拡大図(右側)である。尚、以下の説明では、第1の実施形態による構成を基礎として以下に例を挙げる。
【0115】
図42に示すように、本実施形態では、例えばバルクのPZT等の圧電体を有して構成された駆動用圧電素子40及び検出用圧電素子50,60をH型振動子10に固定する際の位置決めを正確且つ容易に行うための位置決めマーカ98,99が、予めH型振動子10上の搭載位置に設けられている。この位置決めマーカ98,99は、各圧電素子の下部電極41,54,67と一体形成されている。即ち、製造工程において、位置決めマーカ98,99と一体の下部電極41,54,67をシリコン基板Sの所定領域に形成し、これに上部電極43,56,69が形成されたバルクの圧電膜42,55,68を固着する。固着には、例えば接着材等を用いることができる。この際、導電性接着剤等の樹脂が有効である。特に、異方導電性接着材を用いることで、下部電極と圧電膜との電極面のみを確実に導電させることが可能である。このほか、圧電膜における下部電極41,54,67との接着面に予め金属膜を形成しておき、これを下部電極と直接接合するように構成することも可能である。このように位置決めマーカ98,99を設けておくことで、本実施形態では角速度センサの歩留り及び製造効率を向上させることが可能となる。
【0116】
また、このほか、駆動用圧電素子40及び検出用圧電素子50,60の位置決めのために、シリコン基板S上に例えば酸化シリコン膜で位置決め用マーカ(上記98,99と同様の形状)を設けても、シリコン基板S自体を位置決め用マーカ(上記98,99と同様の形状)を有するように加工してもよい。このほか、例えば図43に示すように、シリコン基板S自体に貼り付ける圧電素子と同形状の凹部97を所定の深さに設けても良い。これにより、同様に、角速度センサの歩留りを向上させることをが可能となる。尚、図43(a)は、この際の角速度センサ114におけるH型振動子10の上面図を示し、(b)は(a)の線B4−B4に沿った断面形状を示す。
【0117】
〔第15の実施形態〕
また、上述した各実施形態では、H型振動子10の基板にシリコン基板を用いていたが、本発明では、このほかにも、例えば水晶やタンタル酸リチウム(LT)やニオブ酸リチウム(LN)やPZT等の圧電素子の基板を用いることが可能である。これらの材料の何れか1つ以上を用いて、上述した何れかの実施形態による角速度センサを形成することで、同様に、高感度の角速度センサを製造することが可能である。
【0118】
〔第16の実施形態〕
また、上記した各実施形態では、材料基板としてシリコン基板(S)を用いていた。本発明ではこれに限定されず、材料基板として例えば圧電基板を用いることも可能である。以下、これを第16の実施形態として図面に示す。
【0119】
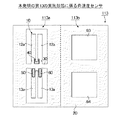
図44は、本実施形態による角速度センサ116の構成を表す。図44(a)は角速度センサ116の平面図であり、(b)はその線B5−B5に沿った断面形状を示す図である。図44に示すように、本実施形態では圧電材料で形成された第2アーム13A,13Bを挟んで、検出用圧電素子を形成するための下部電極154,167及び上部電極156,169が形成されている。尚、駆動用圧電素子側に関しても、H型振動子10Aの裏面には上部電極143に対向して下部電極が形成されている。
【0120】
このような構成において、第1アーム12A,12Bの根元には上述した第1の実施形態と同様に溝21〜24が形成されており、また、第2アーム13A,13Bの根元には同様に溝31〜34が形成されている。従って、本実施形態においても見かけ上のアームの長さが長くなり、検出感度を向上させることが達成されている。
【0121】
また、以上のように圧電基板を用いた構成は、第1の実施形態に限らず、他の実施形態に関しても、適宜適用することができるものである。
【0122】
〔他の実施形態〕
以上、説明した実施形態は本発明の好適な一実施形態にすぎず、本発明はその趣旨を逸脱しない限り種々変形して実施可能である。
【0123】
【発明の効果】
以上説明したように、本発明によれば、半導体基板及び圧電素子を用いた小型の角速度センサにおいて、アーム根元部分の形状を細くすることで剛性を低下させ、又は支持部に穴を設けることでバネ性を持たせるため、アームの変位量を増大することができ、これにより高感度化が実現される。また、基板の両面に駆動用,圧電用又はその両方の圧電素子を設けることでも角速度センサの高感度化が実現されている。
【図面の簡単な説明】
【図1】本発明の基本構成に係る角速度センサ100の構成を示す平面図である。
【図2】図1の線II−IIに沿った部分断面図であり、(a)はDeep−RIEによる片面エッチングを用いて形成した場合を示し、(b)は結晶異方性エッチングを用いた形成した場合を示し、(c)は各アーム間及びアーム−フレーム間の距離を等しくすることでエッチング幅調整用レジストパターン116’を用いることなく作製した場合を示す。
【図3】図1の線III−IIIに沿った断面図であり、(a)はDeep−RIEによる片面エッチングを用いて形成した場合を示し、(b)は結晶異方性エッチングを用いた形成した場合を示し、(c)はトーションバー30の幅を他の構成よりも狭く加工した場合を示す。
【図4】図1に示す角速度センサ100の動作モードと検出モードとを説明するための図である。
【図5】図1に示す角速度センサ100におけるH型振動子10の部位毎の歪み量を示すグラフである。
【図6】本発明で用いられる検出回路の一例を示す回路図である。
【図7】本発明の基本構成に係る別の角速度センサ100aの構成を示す平面図である。
【図8】本発明の第1の実施形態に係る角速度センサ101の構成を示す平面図である。
【図9】図8の線IV−IVに沿った部分断面図である。
【図10】図8に示す角速度センサ101におけるH型振動子10の部位毎の歪み量を示すグラフである。
【図11】本発明の第1の実施形態に係る角速度センサ101の製造方法で用いられるエッチング幅調整用レジストパターン116’を有するレジストパターン116の構成を示す平面図である。
【図12】図11の別のレジストパターン116の構成を示す平面図である。
【図13】本発明の第1の実施形態に係るパッケージングされた角速度センサ101を図8の線II−IIに沿ってパッケージごと切断した際の断面形状を示す図である。
【図14】本発明の第1の実施形態に係る角速度センサ101の製造方法を説明するためのプロセス図である。
【図15】図14に続く製造方法を示すプロセス図である。
【図16】図14に続く別の製造方法を示すプロセス図である。
【図17】図8に示す角速度センサ101をフレーム20とH型振動子10及びトーションバー30とを別々に作製した場合の構成を示す平面図である。
【図18】本発明の第2の実施形態に係る角速度センサ102の構成を示す平面図である。
【図19】図18に示す角速度センサ102における駆動モードでの様子を示す図であり、(a)はアームが開く場合の各部の変位を示し、(b)はアームが閉じる場合の各部の変位を示す。
【図20】本発明の第2の実施形態に係る角速度センサ102において貫通穴を4つ設けた場合の構成を示す平面図である。
【図21】本発明の第2の実施形態に係る角速度センサ102の製造方法で用いられるエッチング幅調整用レジストパターン116’を有するレジストパターン116の構成を示す平面図である。
【図22】図11の別のレジストパターン116の構成を示す平面図である。
【図23】本発明の第3の実施形態に係る角速度センサ103の構成を示す平面図である。
【図24】(a)は図23の線VI−VIに沿った部分断面図であり、(b)は図23の線IX−IXに沿った部分断面図である。
【図25】図23に示す角速度センサ103の駆動用圧電素子側の接続形態を示す図であり、(a)はアーム毎において上部電極同士及び下部電極同士を共通に接続した場合を示し、(b)はアーム毎において異なる駆動用圧電素子間の上部電極及び下部電極をそれぞれ共通に接続した場合を示す。
【図26】図23に示す角速度センサ103の検出用圧電素子側において差動検出を実現した場合の接続形態を示す図であり、(a)はアーム毎において上部電極同士及び下部電極同士を共通に接続した場合を示し、(b)はアーム毎において異なる駆動用圧電素子間の上部電極及び下部電極をそれぞれ共通に接続した場合を示す。
【図27】本発明の第4の実施形態に係る角速度センサ104の構成を示す図であり、(a)はその部分平面図であり、(b)は(a)の線IV−IVに沿った部分断面図である。
【図28】本発明の第5の実施形態に係る角速度センサ105の構成を示す平面図である。
【図29】図28の線IX−IXに沿った断面図である。
【図30】本発明の第5の実施形態に係る角速度センサ105の製造方法を説明するためのプロセス図である。
【図31】図30に続く製造方法を示すプロセス図である。
【図32】本発明の第6の実施形態に係る角速度センサ106の構成を示す平面図である。
【図33】本発明の第7の実施形態に係る角速度センサ107の構成を示す平面図である。
【図34】本発明の第8の実施形態に係る角速度センサ108の構成を示す平面図である。
【図35】図34に示す角速度センサ108の駆動用圧電素子40,45,46へ印加する電圧波形の一例を示す図である。
【図36】本発明の第9の実施形態に係る角速度センサ109の構成を示す平面図である。
【図37】図36に示す角速度センサ109の駆動用圧電素子40,45,46,47,48へ印加する電圧波形の一例を示す図である。
【図38】本発明の第10の実施形態に係る角速度センサ110の構成を示す図であり、(a)はその平面図を示し、(b)は(a)の線B2−B2に沿った部分断面図である。
【図39】本発明の第11の実施形態に係る角速度センサ111の構成を示す図であり、(a)はその平面図を示し、(b)は(a)の線B3−B3に沿った部分断面図である。
【図40】本発明の第12の実施形態に係る角速度センサ112の構成を示す平面図である。
【図41】本発明の第13の実施形態に係る角速度センサ113の構成を示す平面図である。
【図42】本発明の第14の実施形態に係る角速度センサ114の構成を示す平面図及びその部分拡大図である。
【図43】本発明の第14の実施形態に係る別の角速度センサ114におけるH型振動子10の構成を示す図であり、(a)はその上面図であり、(b)は(a)の線B4−B4に沿った部分断面図である。
【図44】本発明の第16の実施形態に係る角速度センサ116の構成を示す図であり、(a)はその上面図であり、(b)は(a)の線B5−B5に沿った部分断面図である。
【図45】従来のビーム型角速度センサ800の構成を示す図であり、(a)はその斜視図であり、(b)は(a)の線B1−B1に沿った断面図である。
【図46】従来の音叉型角速度センサ900の構成を示す斜視図である。
【符号の説明】
10、10A H型振動子
11 支持部
11’ 又部
12a、12A、12b、12B 第1アーム
13a、13A、13b、13B 第2アーム
20 フレーム
21、22、23、24、27a、27b、31、32、33、34 溝
21’、22’、23’、24’、31’、32’、33’、34’ 窪み
25、25a、25b、26、26a、26b 貫通穴
25’、26’ 穴
30 トーションバー
40、40’、40a、40b、40c、40d、45、46、47、48 駆動用圧電素子
41、41a、41b、41c、41d、54、54a、54b、67、67a、67b、154、167 下部電極
43、43a、43b、43c、43d、56、56a、56b、69、69a、69b、143、156、169 上部電極
42、42a、42b、42c、42d、55、55a、55b、68、68a、68b 圧電膜
50、60、50a、50b、60a、60b、70、70’、80、80’検出用圧電素子
55’、68’ 圧電体
71、73、74、76、77、79 配線
71a’、71b’、71c’、71d’、73’、73a’、73b’、73c’、73d’、76’、79’ ワイヤ
81 駆動下部電極パッド
81a、81c、83a、83c 電極パッド
83 駆動上部電極パッド
84、87 検出下部電極パッド
86、89 検出上部電極パッド
90a パッケージング部材
90a’ 退避部
90b スペーサ
91 嵩高部
92 重り部
93 駆動回路
94 検出回路
97 凹部
98、99 位置決めマーカ
100、100a、102、103、104、105、106、107、108、109、110、111、112、113、114、116 角速度センサ
113a センサ部
113b 回路部
116、118 レジストパターン
116’ エッチング幅調整用レジストパターン
116’a 架橋部
S シリコン基板
Claims (15)
- 長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第1の腕部と該第1の腕部を振動させるための第1の圧電素子とを含む振動部と、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第2の腕部と該第2の腕部に発生した振動を検出するための第2の圧電素子とを含む検出部とを有する角速度センサにおいて、
前記第1及び第2の腕部と一体形成された支持部を有し、
前記第1及び第2の腕部の少なくとも一方における前記支持部側の端が該第1又は第2の腕部の胴体幅よりも細くなっていることを特徴とする角速度センサ。 - 前記第1及び第2の腕部の少なくとも一方における前記支持部側の端に溝を有することを特徴とする請求項1記載の角速度センサ。
- 前記溝は前記腕部を外周するように形成されていることを特徴とする請求項2記載の角速度センサ。
- 長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第1の腕部と該第1の腕部を振動させるための第1の圧電素子とを含む振動部と、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第2の腕部と該第2の腕部に発生した振動を検出するための第2の圧電素子とを含む検出部とを有する角速度センサにおいて、
前記第1及び第2の腕部と一体形成された支持部と、
該支持部に形成された2つ以上の穴とを有することを特徴とする角速度センサ。 - 前記穴は前記支持部の中心に関して点対称に形成されていることを特徴とする請求項4記載の角速度センサ。
- 長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第1の腕部と該第1の腕部を振動させるための第1の圧電素子とを含む振動部と、長手方向に対して平行で且つ互いに平行な2面を含む少なくとも2本の第2の腕部と該第2の腕部に発生した振動を検出するための第2の圧電素子とを含む検出部とを有する角速度センサにおいて、
前記第1及び第2の圧電素子の少なくとも一方は前記腕部の胴体部分であって対向する2面に形成されていることを特徴とする角速度センサ。 - 前記第1及び/又は第2の圧電素子は、第1及び第2の電極膜で挟まれた圧電体を含んで構成され、
前記第1の電極膜は、少なくとも前記圧電体を位置決めするための凸部を有することを特徴とする請求項1から6の何れか1項に記載の角速度センサ。 - 前記支持部と前記第1の腕部と前記第2の腕部とのうち少なくとも1つは、前記第1及び/又は第2の圧電素子を位置決めするための凸部又は凹部を有することを特徴とする請求項1から6の何れか1項に記載の角速度センサ。
- 前記第1及び/又は第2の圧電素子は、樹脂により前記支持部と前記第1又は第2の腕部とのうち少なくとも一方に固定されていることを特徴とする請求項1から8の何れか1項に記載の角速度センサ。
- 前記樹脂は導電性樹脂又は異方性導電性樹脂であることを特徴とする請求項9記載の角速度センサ。
- 前記第1及び/又は第2の圧電素子は、少なくとも1面に第1の金属膜を有し、
前記支持部と前記第1又は第2の腕部の少なくとも一方は、前記第1又は第2の圧電素子を接合するための第2の金属膜を有し、
前記第1及び第2の金属膜を直接接合することで、前記第1又は第2の圧電素子を固定していることを特徴とする請求項1から8の何れか1項に記載の角速度センサ。 - 長手方向に対して平行で且つ互いに平行な2面を含む圧電素子で形成された少なくとも2本の第1の腕部を該第1の腕部の表面に形成された第1の電極膜を用いて振動させる振動部と、長手方向に対して平行で且つ互いに平行な2面を含む圧電素子で形成された少なくとも2本の第2の腕部に発生した振動を該第2の腕部の表面に形成された第2の電極膜を用いて検出する検出部とを有する角速度センサにおいて、
前記第1及び第2の腕部と一体形成された支持部を有し、
前記第1及び第2の腕部の少なくとも一方における前記支持部側の端が該第1又は第2の腕部の胴体幅よりも細くなっていることを特徴とする角速度センサ。 - 長手方向に対して平行で且つ互いに平行な2面を含む圧電素子で形成された少なくとも2本の第1の腕部を該第1の腕部の表面に形成された第1の電極膜を用いて振動させる振動部と、長手方向に対して平行で且つ互いに平行な2面を含む圧電素子で形成された少なくとも2本の第2の腕部に発生した振動を該第2の腕部の表面に形成された第2の電極膜を用いて検出する検出部とを有する角速度センサにおいて、
前記第1及び第2の腕部と一体形成された支持部と、
該支持部に形成された2つ以上の穴とを有することを特徴とする角速度センサ。 - 前記第1又は第2の腕部の断面は、2本の該第1又は第2の腕部が延在する面に対して垂直で且つ該第1又は第2の腕部の長手方向と平行な面に関して面対称を成し、
前記第1及び第2の腕部と前記支持部とを含む振動子は、該支持部の中心に関して点対称を成していることを特徴とする請求項1から13の何れか1項に記載の角速度センサ。 - 前記支持部と前記第1及び第2の腕部との外周に形成されたフレームと、
該フレームと前記支持部とを連結して固定するトーションバーとを有し、
前記トーションバーの幅が前記支持部の厚さよりも薄いことを特徴とする請求項1から14の何れか1項に記載の角速度センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003040087A JP2004251663A (ja) | 2003-02-18 | 2003-02-18 | 角速度センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003040087A JP2004251663A (ja) | 2003-02-18 | 2003-02-18 | 角速度センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004251663A true JP2004251663A (ja) | 2004-09-09 |
Family
ID=33024076
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003040087A Pending JP2004251663A (ja) | 2003-02-18 | 2003-02-18 | 角速度センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004251663A (ja) |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007212355A (ja) * | 2006-02-10 | 2007-08-23 | Seiko Instruments Inc | 角速度センサ用圧電振動子 |
| JP2008051647A (ja) * | 2006-08-24 | 2008-03-06 | Sumida Corporation | 圧電加速度センサ |
| JP2008175578A (ja) * | 2007-01-16 | 2008-07-31 | Nec Tokin Corp | 圧電振動ジャイロ用振動子 |
| JP2009005022A (ja) * | 2007-06-20 | 2009-01-08 | Seiko Epson Corp | 音叉型振動子、発振器 |
| JP2009005024A (ja) * | 2007-06-20 | 2009-01-08 | Seiko Epson Corp | 音叉型振動子、発振器 |
| JP2009005023A (ja) * | 2007-06-20 | 2009-01-08 | Seiko Epson Corp | 音叉型振動子、発振器 |
| JP2009081836A (ja) * | 2007-09-05 | 2009-04-16 | Seiko Epson Corp | 圧電薄膜音叉振動片、圧電薄膜音叉振動子及び加速度センサ |
| JP2011209002A (ja) * | 2010-03-29 | 2011-10-20 | Seiko Epson Corp | 振動片、角速度センサー、および電子機器 |
| JP2011209003A (ja) * | 2010-03-29 | 2011-10-20 | Seiko Epson Corp | 振動片、角速度センサー、および電子機器 |
| JP2011232200A (ja) * | 2010-04-28 | 2011-11-17 | Panasonic Corp | 角速度センサ素子およびその製造方法 |
| US8065914B2 (en) | 2007-07-06 | 2011-11-29 | Seiko Epson Corporation | Vibration gyro |
| CN102840858A (zh) * | 2011-06-24 | 2012-12-26 | 精工爱普生株式会社 | 弯曲振动片以及电子设备 |
| JP2013024678A (ja) * | 2011-07-20 | 2013-02-04 | Seiko Epson Corp | 振動ジャイロ素子、ジャイロセンサー及び電子機器 |
| WO2015075899A1 (ja) * | 2013-11-22 | 2015-05-28 | パナソニックIpマネジメント株式会社 | 角速度センサ素子および角速度センサ |
| JP2015152521A (ja) * | 2014-02-18 | 2015-08-24 | 株式会社デンソー | ジャイロセンサ |
| US9347776B2 (en) | 2012-03-28 | 2016-05-24 | Seiko Epson Corporation | Vibrating element and manufacturing method for the same, gyro sensor, electronic apparatus and moving object |
| US9354060B2 (en) | 2012-03-28 | 2016-05-31 | Seiko Epson Corporation | Vibrating element, gyro sensor, electronic apparatus and moving object |
| US9366535B2 (en) | 2011-07-21 | 2016-06-14 | Seiko Epson Corporation | Vibration gyro element, gyro sensor, and electronic apparatus |
| WO2017204057A1 (ja) * | 2016-05-26 | 2017-11-30 | ソニー株式会社 | ジャイロセンサ及び電子機器 |
-
2003
- 2003-02-18 JP JP2003040087A patent/JP2004251663A/ja active Pending
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007212355A (ja) * | 2006-02-10 | 2007-08-23 | Seiko Instruments Inc | 角速度センサ用圧電振動子 |
| JP2008051647A (ja) * | 2006-08-24 | 2008-03-06 | Sumida Corporation | 圧電加速度センサ |
| JP2008175578A (ja) * | 2007-01-16 | 2008-07-31 | Nec Tokin Corp | 圧電振動ジャイロ用振動子 |
| JP2009005022A (ja) * | 2007-06-20 | 2009-01-08 | Seiko Epson Corp | 音叉型振動子、発振器 |
| JP2009005024A (ja) * | 2007-06-20 | 2009-01-08 | Seiko Epson Corp | 音叉型振動子、発振器 |
| JP2009005023A (ja) * | 2007-06-20 | 2009-01-08 | Seiko Epson Corp | 音叉型振動子、発振器 |
| US8065914B2 (en) | 2007-07-06 | 2011-11-29 | Seiko Epson Corporation | Vibration gyro |
| JP2009081836A (ja) * | 2007-09-05 | 2009-04-16 | Seiko Epson Corp | 圧電薄膜音叉振動片、圧電薄膜音叉振動子及び加速度センサ |
| JP2011209003A (ja) * | 2010-03-29 | 2011-10-20 | Seiko Epson Corp | 振動片、角速度センサー、および電子機器 |
| JP2011209002A (ja) * | 2010-03-29 | 2011-10-20 | Seiko Epson Corp | 振動片、角速度センサー、および電子機器 |
| JP2011232200A (ja) * | 2010-04-28 | 2011-11-17 | Panasonic Corp | 角速度センサ素子およびその製造方法 |
| US9121707B2 (en) | 2011-06-24 | 2015-09-01 | Seiko Epson Corporation | Bending vibration piece and electronic device |
| CN102840858A (zh) * | 2011-06-24 | 2012-12-26 | 精工爱普生株式会社 | 弯曲振动片以及电子设备 |
| JP2013024678A (ja) * | 2011-07-20 | 2013-02-04 | Seiko Epson Corp | 振動ジャイロ素子、ジャイロセンサー及び電子機器 |
| US9366535B2 (en) | 2011-07-21 | 2016-06-14 | Seiko Epson Corporation | Vibration gyro element, gyro sensor, and electronic apparatus |
| US9347776B2 (en) | 2012-03-28 | 2016-05-24 | Seiko Epson Corporation | Vibrating element and manufacturing method for the same, gyro sensor, electronic apparatus and moving object |
| US9354060B2 (en) | 2012-03-28 | 2016-05-31 | Seiko Epson Corporation | Vibrating element, gyro sensor, electronic apparatus and moving object |
| US9523578B2 (en) | 2012-03-28 | 2016-12-20 | Seiko Epson Corporation | Vibrating element and manufacturing method for the same, gyro sensor, electronic apparatus and moving object |
| WO2015075899A1 (ja) * | 2013-11-22 | 2015-05-28 | パナソニックIpマネジメント株式会社 | 角速度センサ素子および角速度センサ |
| JP2015152521A (ja) * | 2014-02-18 | 2015-08-24 | 株式会社デンソー | ジャイロセンサ |
| WO2017204057A1 (ja) * | 2016-05-26 | 2017-11-30 | ソニー株式会社 | ジャイロセンサ及び電子機器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4147784B2 (ja) | 角速度センサ | |
| JP2004251663A (ja) | 角速度センサ | |
| JP3999377B2 (ja) | 振動子、振動型ジャイロスコープ、直線加速度計および回転角速度の測定方法 | |
| JP3973742B2 (ja) | 振動型ジャイロスコープ | |
| JP5450451B2 (ja) | 垂直方向に集積した電子回路およびウェハスケール密封包装を含むx−y軸二重質量音叉ジャイロスコープ | |
| JPH1054723A (ja) | 角速度検出装置 | |
| CN100538272C (zh) | 压电陀螺元件和压电陀螺仪 | |
| WO1998007005A1 (en) | Angular velocity detector | |
| JP5205725B2 (ja) | 角速度センサ | |
| CN103688136B (zh) | 振动器以及振动陀螺仪 | |
| US20060201248A1 (en) | Vibrating gyro element | |
| JP3892993B2 (ja) | 振動型ジャイロスコープ | |
| WO2006075764A1 (ja) | 振動型ジャイロスコープ | |
| JP3751745B2 (ja) | 振動子、振動型ジャイロスコープおよび回転角速度の測定方法 | |
| JPH11173850A (ja) | 角速度センサ | |
| JP3257203B2 (ja) | 角速度検出素子の振動数調整方法と角速度検出素子 | |
| JP6733621B2 (ja) | 振動型角速度センサ | |
| JP5421651B2 (ja) | 3軸角速度検出振動子、3軸角速度検出装置および3軸角速度検出システム | |
| JP3355998B2 (ja) | 振動ジャイロ | |
| JP5135253B2 (ja) | 慣性センサおよび慣性測定装置 | |
| JP2012112819A (ja) | 振動ジャイロ | |
| JP2004077351A (ja) | 角速度センサ | |
| JP2007163248A (ja) | 圧電振動ジャイロ | |
| JP3701785B2 (ja) | 振動子、振動型ジャイロスコープ、直線加速度計および回転角速度の測定方法 | |
| JP3371609B2 (ja) | 振動ジャイロ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050726 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061201 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071002 |