JP2004227231A - 画像データへの立体情報埋め込み方法、装置、プログラム、および記録媒体 - Google Patents
画像データへの立体情報埋め込み方法、装置、プログラム、および記録媒体 Download PDFInfo
- Publication number
- JP2004227231A JP2004227231A JP2003013500A JP2003013500A JP2004227231A JP 2004227231 A JP2004227231 A JP 2004227231A JP 2003013500 A JP2003013500 A JP 2003013500A JP 2003013500 A JP2003013500 A JP 2003013500A JP 2004227231 A JP2004227231 A JP 2004227231A
- Authority
- JP
- Japan
- Prior art keywords
- data
- pixel
- parallax
- image data
- embedding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






















Landscapes
- Image Processing (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Editing Of Facsimile Originals (AREA)
Abstract
【解決手段】画像データの画素ごとに輝度値を割り振る第1ステップと、画素ごとに割り振られた輝度値の下位bitを、その画素に対応する奥行きデータに置き換える第2ステップと、により画像データヘ立体情報埋め込む。これにより、従来の画像データと互換性を保ちながら、データ量をヘッダーを除いて全く増やすことなく奥行き値を埋め込むことが可能となる。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、2次元の画像データに立体情報を埋め込む方法、装置、プログラム、および記録媒体に関する。
【0002】
【従来の技術】
物体の立体形状を記述する最も一般的な従来法としてポリゴンを用いたものがある。ポリゴンとは立体形状の表現に用いる多角形で、物体の立体形状を多角形の面の集合とするサーフェースモデルなどで使用される。ポリゴンを用いて立体形状を用いているフォーマットの例として、CADのデータ交換に用いられるIGESやWebでの立体形状表示用のVRMLなどがある。しかしポリゴンを用いた立体形状の記述は詳細なモデルを表現しようとするとデータ量が膨れ上がるといった問題点がある。また表示には専用のビューアーが必要となり、一般的に普及している2次元画像を表示しているビューアーでは見ることが出来ない。
【0003】
上記データ量肥大を解決した従来法としてXVL技術がある。XVL技術とは大まかな格子点と、その間を内挿する滑らかな自由曲面で立体形状を表現する技術で、ポリゴンを用いたものに比べて大幅にデータ量を減らすことが可能になる。しかし、この場合も表示には専用のビューアーを用いる必要があり、2次元画像との互換性を持たない(非特許文献1参照。)。
【0004】
また立体視用に特化した従来法として、単純に2枚のステレオ画像を用意するものがある。この方法は2枚の画像のうち片方だけを用いれば2次元画像として用いることはできるが、データを単一のファイルとして管理することができない・データ量が2倍に増えてしまうといった問題がある(非特許文献2参照。)。
【0005】
本技術の類似技術として、原画像を任意サイズの複数ブロックに分割し、各ブロックごとの高さ情報をコード化したものを原画像の特定周波数成分に電子透かしとして埋め込む技術が開示されている。この技術では、埋め込み時に人間が知覚できない周波数成分を選択し変更量を随時決定する工夫により、原画像の劣化を防ぐことが可能となる。
【0006】
しかし、デコードを行うためには高さ情報の埋め込み位置と変更量を鍵情報として別途取得し同時に配布しなければならない問題がある。また、鍵情報をあらかじめ決めておき専用ビューアーに持たせることもあるが、その場合は原画像が劣化する問題がある。さらに、コードは各領域ごとに割り振られるため、基本的には各領域ごとにしか高さを割り振ることができない問題点がある。なお、1つのコードが領域内の各画素ごとに付与した高さ情報を表すこととすれば、原理的には全画素の高さ情報を割り振ることができるが、専用ビューアーにコードと高さの対応を持たせることが困難となる(特許文献1参照。)。
【0007】
【特許文献1】
特開平10−293861号公報
【非特許文献1】
ラティス・テクノロジー株式会社、「XVLとは?−標準化に向けて」、[online]、ラティス・テクノロジー株式会社、[平成14年12月2日検索]、インターネット<URL: http://www.xvl3d.com/ja/whatsxvl/sta.htm>
【非特許文献2】
井下哲夫、「エッジ情報を利用した画像圧縮」、[online]、大阪大学大学院 基礎工学研究科、[平成14年12月2日検索]、インターネット<URL: http://www.sys.es.osaka−u.ac.jp/Paper/B1998/inoshita.html>
【0008】
【発明が解決しようとする課題】
近年、PCや携帯端末を用いて画像データの通信を行い付属の画像ビューアーを用いて閲覧することが一般的になっている。現状では主に扱われる画像データは輝度情報のみであるが、画像の立体情報のやり取りが同時にできれば画像の活用の幅が広がり利用方法が増大する。
【0009】
しかしながら従来の立体情報を扱うデータ形式では、一般的にデータ量が肥大してしまい通信に向いていなかった。またデータ量が肥大しない場合も専用のビューアーが必要であった。以上の問題により、立体情報を含む画像データは、主にオフラインで専用のビューアーを持った端末同士でのみ交換されていた。
【0010】
【課題を解決するための手段】
本発明は上記の課題を鑑みて発明されたものであり、従来の画像データと互換性を持ち、専用ビューアーで閲覧した場合のみ立体情報が反映される画像データヘの立体情報埋め込み方法、装置、プログラム、および記録媒体を提供する。
【0011】
具体的には従来の画像データが持つ各画素の輝度値の下位bitを、その画素に対応する立体情報と置き換える。下位bitを立体情報と置き換えても従来のビューアーでは置き換えられたことが認識できないので、下位bitが改変された従来の画像データとして読み込まれる。一方、専用ビューアーでは下位bitが立体情報として扱えるので表示に立体形状の反映が可能になる。なお専用ビューアーでの立体情報埋め込みの有無に対する判断は、画像データのヘッダーを用いるか、もしくは画像データの特定位置の下位bitに立体情報以外の固有の情報を埋め込むことにより解決する。
【0012】
埋め込む立体情報は復元すべきデータによって決定する。復元すべきデータが立体形状の場合は、画素ごとにその画素における奥行き情報を埋め込む。また復元すべきデータがステレオ画像の場合は、画素ごとにその画素における視差情報を埋め込む。
【0013】
本発明では画像データの下位bitに立体情報を埋め込むため真の輝度値を改変することになる。しかし人間が分別できる彩度は赤や青でおよそ40段階(5〜6bit)なので、一般的に用いられているRGB24bit画像では、赤成分と青成分の下位2〜3bit程度は改変しても多くの場合知覚されることはない。また視感度が高い緑成分も下位2bit程度までは改変の影響は小さい。
【0014】
【発明の実施の形態】
以下、実施例に基づいて、この発明をさらに詳しく説明する。
【0015】
[実施例1]
図1は本発明の第1の実施例(請求項1に記載の発明に対応する実施例)のフローを示す図である。以下、図1を用いて詳細な動作の説明を行う。
【0016】
まずモノクロ画像(横方向x画素、縦方向y画素)の輝度値データTnを読み込む(ステップS1−1)。
【0017】
次に読み込んだモノクロ画像の輝度値をa bitの画素ごとのデータMnとして割り振る(ステップS1−2、S1−3)。本実施例では一般的な256階調の輝度値を持つモノクロ画像として、a bit=8bitとする。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0018】
次に奥行き値データDnの読み込みを行う(ステップS1−4)。奥行き値データは輝度値データと同じ画像サイズ(横方向x画素、縦方向y画素)を持つbbit(ただしa>b)のデータとし、本実施例では2bitのbit長と定義する。
【0019】
続いて輝度値データの下位bitを奥行き値データDnと置き換えるためのマスクを作成する(ステップS1−5)。マスクはa bit長の長さを持ち、下位b bitが0、残りの上位bitが1で表される。具体的にはa bit長のデータに0を代入したものを反転し(ステップS1−51、S1−52)、それをb bitだけ右シフトした後、b bitだけ左シフトすることにより作成する(ステップS1−53、S1−54)。ここで、m>>bはmをb bit右シフトする演算、m<<bはmをb bit左シフトする演算を表す。
【0020】
ここで作成したマスクを用いて、各々の画素に対応する輝度値の下位bitを奥行き値と置き換える(ステップS1−7)。置き換えた値は埋め込みデータZnとして出力される(ステップS1−8)。
【0021】
なお下位bitへの奥行き値の埋め込み方法の手順は上記アルゴリズムに限定されることはなく、同様の結果を得られれば適時順序の入れ替えなどを行っても良い。
【0022】
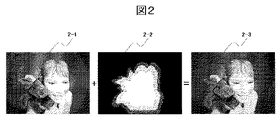
図2は実際の埋め込み例を示す。2−1は8bitの輝度値データ、2−2は2bitの奥行き値データ(ただし図では2bitで表すことができる4階調を強調表示してある)、2−3は2−1に2−2を埋め込んだデータを従来のビューアーで表示した例である。
【0023】
図3は埋め込みデータをビューアーで表示する場合を示す。埋め込み画像3−1を従来型の画像ビューアー3−21で表示した場合は、従来と同様の画像出力3−22を得ることができる。一方、埋め込み画像3−1を専用のビューアー3−31で表示した場合は、従来と同様の画像出力と奥行き値データ出力の2つ3−32を同時に得ることができる。専用のビューアー3−31で表示する場合、奥行き値埋め込みの有無に対する判断はヘッダー情報から判断する。具体的には、本実施例で用いる画像フォーマットをpng形式とし、ヘッダーの付随的ブロック部にあるテキスト・データに奥行き値の有無を判別する情報を埋め込む。付随的ブロックは通常エンコーダはそれらを書く必要がなく、デコーダはそれを無視してよいという意味でオプションであるため、従来の画像ビューアーの持つデコーダでは解釈されない。またヘッダーに奥行き値の有無を埋め込むのではなく、画面の上下左右の周囲の1ラインずつの輝度値データのいずれかの下位bitを奥行き値の変わりに奥行き値の有無を判断する情報と置き換えても良い。なお、本発明の画像フォーマットは上記実施例に限定されるものではなく、データの可逆性を保証するものであれば良い。同様にヘッダーの、データを埋め込むブロックも従来の画像ビューアーのデコードの邪魔にならない位置であればいずれの位置でも良い。
【0024】
以上の手順により、モノクロ画像において従来の画像データと互換性を保ちながら、データ量をヘッダーを除いて全く増やすことなく、奥行き値を埋め込むことが可能となる。
【0025】
[実施例2]
図4は本発明の第2の実施例(請求項1に記載の発明に対応する実施例)のフローを示す図である。以下、図4を用いて詳細な動作の説明を行う。
【0026】
まずモノクロ画像(横方向x画素、縦方向y画素)の輝度値データTnを読み込む(ステップS4−1)。次に読み込んだモノクロ画像の輝度値をa bitの画素ごとのデータMnとして割り振る(ステップS4−2、S4−3)。本実施例では一般的な256階調の輝度値を持つモノクロ画像として、a bit=8bitとする。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0027】
次に奥行き値データDnの読み込みを行う(ステップS4−4)。奥行き値データは輝度値データと同じ画像サイズ(横方向x画素、縦方向y画素)を持つ任意のb bitのデータとする。本実施例ではb bit=a bitとし、埋め込み可能なbit長をc bitとする。
【0028】
このとき、埋め込み可能なデータ長(c)と奥行き値データDnのbit長(b)が異なるため変換を行う(ステップS4−5)。具体的には、Dnが表現可能な最大変位量を埋め込み可能なデータ長cが表現可能な最大変位量で除算を行いcの最小変位量に対するDnの変位量lを求め(ステップS4−51、S4−52)、Dnの各画素に対応する奥行き値をlで除算することにより変換した奥行き値データD’nを得る(ステップS4−54)。
【0029】
続いて輝度値データの下位bitを変換した奥行き値データD’nと置き換えるためのマスクを作成する(ステップS4−6)。マスクはa bit長の長さを持ち、下位c bitが0、残りの上位bitが1で表される。具体的にはa bit長のデータに0を代入したものを反転し(ステップS4−61、S4−62)、それをc bitだけ右シフトした後、c bitだけ左シフトすることにより作成する(ステップS4−63、S4−64)。ここで作成したマスクを用いて、各々の画素に対応する輝度値の下位bitを奥行き値と置き換える(ステップS4−8)。置き換えた値は埋め込みデータZnとして出力される(ステップS4−9)。
【0030】
なお下位bitへの奥行き値の埋め込み方法の手順は上記アルゴリズムに限定されることはなく、同様の結果を得られれば適時順序の入れ替えなどを行っても良い。
【0031】
図5は本実施例でのエンコード・デコードの例を示す。5−1は入力データを示し、5−11は8bitの輝度値データ、5−12は8bitの奥行きデータである。5−2は埋め込み可能なデータ長を2bitとしたときに演算される埋め込み用の奥行き値データである。5−3は実施例1に示される方法などを用いて5−11に5−2を埋め込んだデータである。奥行き値を埋め込んだデータ5−3を専用ビューアー5−4を用いてデコードすると、輝度値データ5−51、奥行き値データ5−52の両方を含む出力5−5を得ることができる。ここで輝度値データ5−51は5−3、奥行き値データ5−52は5−2と等価である。デコードされる奥行き値データ5−52は、入力した奥行き値データ5−12を8bitから2bitに変換したため離散的なものに変換される。
【0032】
以上の手順により、モノクロ画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、奥行き値を埋め込むことが可能となる。
【0033】
[実施例3]
図6は本発明の第3の実施例(請求項2に記載の発明に対応する実施例)のフローを示す図である。以下、図6を用いて詳細な動作の説明を行う。
【0034】
まずモノクロ画像(横方向x画素,縦方向y画素)の輝度値データTnを読み込む(ステップS6−1)。次に読み込んだモノクロ画像の輝度値をa bitの画素ごとのデータMnとして割り振る(ステップS6−2、S6−3)。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0035】
次に奥行き値データDnの読み込みを行う(ステップS6−4)。奥行き値データは輝度値データと同じ画像サイズ(横方向x画素,縦方向y画素)を持つ任意のb bitのデータとする。
【0036】
続いて埋め込み用の奥行き値データD’nを、Mn、およびDnから演算し(ステップS6−5)、画素ごとに埋め込むbit長を算出する。
【0037】
ところでコンピューターにより画面に表示される画像は通常γ補正が行われて出力される。γの値は指定を行わなくてもOSによって決められた値があり、Windowsでは2.2、Macintoshでは1.8が用いられている。γ値が1より大きいとき画像は明るくなり、小さければ暗くなる。つまり1より大きければ補正式に従って輝度値は入力より出力の方が大きくなる。
【0038】
WindowsとMacintoshの平均値を取ってγ=2.0を選択したとき、最大輝度値における94%の値を入力すれば補正式に従って97%の値で出力される。輝度値データが8bitであるとき、下位3bitは約3%(100%−97%)の変位に相当し、下位4bitは約6%(100%−94%)の変位に相当する。すなわちγ補正による出力を考えると、入力がある程度大きければ4bitの改変を行っても出力としては3bitの改変にしか相当しない。
【0039】
埋め込みデータの作成は次の手順で行う。まず始めに輝度値データMnの値が低輝度であるときの埋め込みデータのbit長および高輝度であるときの埋め込みデータのbit長を呼び出す(ステップS6−51)。
【0040】
このとき、埋め込みデータのbit長と奥行き値データDnのbit長が異なるため変換を行う。具体的にはDnが表現可能な最大変位量を、低輝度時および高輝度時の埋め込みデータが表現可能な最大変位量で除算を行い、低輝度時および高輝度時の最小変位量に対する変位量を求め(ステップS6−52)、Dnの各画素に対応する奥行き値を求めた変位量で除算することにより変換した奥行き値データD’nを得る(ステップS6−542、S6−543)。なお専用ビューアーにてデコードを行うときは上位4bitの値が全て1のとき高輝度側と判断する。
【0041】
続いて輝度値データの下位bitを変換した埋め込み用奥行き値データD’nと置き換えるためのマスクを作成する(ステップS6−6)。マスクはa bit長の長さを持ち、低輝度値側の場合は下位c bitの値が0・残りの上位bitが1、高輝度値側の場合は下位dbitが0・残りの上位bitが1で表される。ここでd>cとする。具体的にはa bit長のデータに0を代入したものを反転し(ステップS6−61、S6−62)、それをc bit(またはd bit)だけ右シフト、左シフトの順で操作することにより低輝度用マスクMcと高輝度用マスクMdを作成する(ステップS6−63、S6−64)。
【0042】
ここで作成したマスクを用いて、各々の画素に対応する輝度値の下位bitを奥行き値と置き換える(ステップS6−8)。具体的には輝度値データMnが低輝度のときはマスクMc、高輝度のときはマスクMdを用いて、輝度値データMnの下位bitを埋め込み用奥行き値データD’nと置き換える。
【0043】
置き換えた値は埋め込みデータZnとして出力される(ステップS6−9)。なお下位bitへの奥行き値の埋め込み方法の手順は上記アルゴリズムに限定されることはなく、同様の結果を得られれば適時順序の入れ替えなどを行っても良い。また今回は輝度値データから再現される画像内において輝度が高い画素により多くの情報量を埋め込む演算を行ったが、画像内の各画素に埋め込みデータが目立たないようより多くのデータ埋め込む演算であればよい。例として電子透かしを埋め込む場合と同様に、画像内のエッジ部分などの高周波成分となる画素により多くの情報量を埋め込む演算などがある。
【0044】
以上の手順によりモノクロ画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、より多くの奥行き値を埋め込むことが可能となる。
【0045】
[実施例4]
図7は本発明の第4の実施例(請求項3に記載の発明に対応する実施例)のフローを示す図である。以下、図7を用いて詳細な動作の説明を行う。
【0046】
まずカラー画像(横方向x画素、縦方向y画素)の輝度値データTnを読み込む(ステップS7−1)。
【0047】
次に読み込んだカラー画像の輝度値をRGB各成分に付いてa×3bitの画素ごとのデータMRGBnとして割り振る(ステップS7−2、S7−3)。MRGBnはMRn、MGn、MBnより構成され、それぞれがa bit長のカラー画像のR成分、G成分、B成分にあたるデータである。本実施例では、一般的なRGB成分それぞれ8bitの輝度値を持つカラー画像として、a bit=8bitとする。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0048】
次に奥行き値データDnの読み込みを行う(ステップS7−4)。奥行き値データは輝度値データと同じ画像サイズ(横方向x画素、縦方向y画素)を持つbbit(ただしa×3>b)のデータとし、本実施例では4bitのbit長と定義する。
【0049】
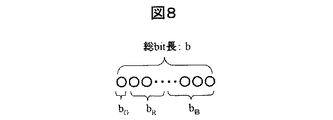
続いて輝度値データの下位bitを奥行き値データDnと置き換えるためのマスクを作成する(ステップS7−5)。マスクmRGBはmR、mG、mBより構成され、それぞれa bit長のR成分、G成分、B成分用のマスクである。RGB成分各要素に埋め込めるデータ長をそれぞれbR、bG、bBとしデータ長の合計はb bitと等価(図8)としたとき、mR、mG、mBはそれぞれ下位bR、bG、bB bitが0、残りの上位bitが1で表される。またbR、bG、bBのbit長の関係はbG≦bR≦bBかつ、bGが上位bit側・bBが下位bit側となるようにする(bRは中間)。これは人間の視感度の強さが緑、赤、青の順で弱くなることを利用し人間が知覚しにくい成分に、より多くのデータを埋め込むためである。本実施例ではbG=0bit、bR=2bit、bB=2bitとした。
【0050】
マスクの具体的作成方法はmR、mG、mBに0を代入して反転し(ステップS7−51、S7−52)、それぞれbR、bG、bB bitずつ右シフト、左シフトの順で操作することにより作成する(ステップS7−53、S7−54)。
【0051】
ここで作成したマスクを用いて、各々の画素に対応するRGB成分の輝度値の下位bitを奥行き値と置き換える(ステップS7−6、S7−7)。具体的には奥行き値データDnが持つ各画素b bitのデータをbR、bG、bB bitずつ分割し、埋め込みデータZRGBnの下位bitと置き換える(ステップS7−71、S7−72)。
【0052】
置き換えた値は埋め込みデータZRGBnとして出力される(ステップS7−8)。
【0053】
なお下位bitへの奥行き値の埋め込み方法の手順は上記アルゴリズムに限定されることはなく、同様の結果を得られれば適時順序の入れ替えなどを行っても良い。
【0054】
図9は実際の埋め込み例を示す。9−1はRGB成分各8bitの輝度値データ、9−2は4bitの奥行き値データ(ただし図では4bitで表すことができる16階調を強調表示してある)、9−3は9−1に9−2を埋め込んだデータを従来のビューアーで表示した例である。
【0055】
図10は埋め込みデータをビューアーで表示する場合を示す。埋め込み画像10−1を従来型の画像ビューアー10−21で表示した場合は、従来と同様の画像出力10−22を得ることができる。一方、埋め込み画像10−1を専用のビューアー10−31で表示した場合は、従来と同様の画像出力と奥行き値データ出力の2つ10−32を同時に得ることができる。専用のビューアー10−31で表示する場合、奥行き値埋め込みの有無に対する判断はヘッダー情報から判断する。具体的には、本実施例で用いる画像フォーマットをpng形式とし、ヘッダーの付随的ブロック部にあるテキストデータに奥行き値の有無を判別する情報を埋め込む。付随的ブロックは通常エンコーダはそれらを書く必要がなく、デコーダはそれを無視してよいという意味でオプションであるため、従来の画像ビューアーの持つデコーダでは解釈されない。またヘッダーに奥行き値の有無を埋め込むのではなく、画面の上下左右の周囲の1ラインずつの輝度値データのいずれかの下位bitを奥行き値の変わりに奥行き値の有無を判断する情報と置き換えても良い。なお、本発明の画像フォーマットは上記実施例に限定されるものではなく、データの可逆性を保証するものであれば良い。同様にヘッダーの、データを埋め込むブロックも従来の画像ビューアーのデコードの邪魔にならない位置であればいずれの位置でも良い。
【0056】
以上の手順により、カラー画像において従来の画像データと互換性を保ちながら、データ量をヘッダーを除いて全く増やすことなく、奥行き値を埋め込むことが可能となる。
【0057】
[実施例5]
図11は本発明の第5の実施例(請求項3に記載の発明に対応する実施例)のフローを示す図である。以下、図11を用いて詳細な動作の説明を行う。
【0058】
まずカラー画像(横方向x画素、縦方向y画素)の輝度値データTnを読み込む(ステップS11−1)。
【0059】
次に読み込んだカラー画像の輝度値をRGB各成分に付いてa×3bitの画素ごとのデータMRGBnとして割り振る(ステップS11−2、S11−3)。MRGBnはMRn、MGn、MBnより構成され、それぞれがa bit長のカラー画像のR成分、G成分、B成分にあたるデータである。本実施例では、一般的なRGB成分それぞれ8bitの輝度値を持つカラー画像として、a bit=8bitとする。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0060】
次に奥行き値データDnの読み込みを行う(ステップS11−4)。奥行き値データは輝度値データと同じ画像サイズ(横方向x画素、縦方向y画素)を持つb bitのデータとする。本実施例ではb bit=a bitとし、埋め込み可能なbit長をc bitとする。
【0061】
このとき、埋め込み可能なデータ長(c)と奥行き値データDnのbit長(b)が異なるため変換を行う(ステップS11−5)。具体的には、Dnが表現可能な最大変位量を埋め込み可能なデータ長cが表現可能な最大変位量で除算を行いcの最小変位量に対するDnの変位量lを求め(ステップS11−51、S11−52)、Dnの各画素に対応する奥行き値をlで除算することにより変換した奥行き値データD’nを得る(ステップS11−54)。
【0062】
続いて輝度値データの下位bitを変換した奥行き値データD’nと置き換えるためのマスクを作成する(ステップS11−6)。マスクmRGBはmR、mG、mBより構成され、それぞれa bit長のR成分、G成分、B成分用のマスクである。RGB成分各要素に埋め込めるデータ長をそれぞれcR、cG、cBとし、データ長の合計はc bitと等価(図12)としたとき、mR、mG、mBはそれぞれ下位cR、cG、cB bitが0、残りの上位bitが1で表される。またcR、cG、cBのbit長の関係はcG≦cR≦cBかつ、cGが上位bit側・cBが下位bit側となるようにする(cRは中間)。これは人間の視感度の強さが緑、赤、青の順で弱くなることを利用し人間が知覚しにくい成分に、より多くのデータを埋め込むためである。本実施例ではcG=0bit、cR=2bit、cB=2bitとした。
【0063】
マスクの具体的作成方法はmR、mG、mBそれぞれに0を代入して反転し(ステップS11−61、S11−62)、それぞれcR、cG、cB bitずつ右シフト、左シフトの順で操作することにより作成する(ステップS11−63、S11−64)。
【0064】
ここで作成したマスクを用いて、各々の画素に対応するRGB成分の輝度値の下位bitを奥行き値と置き換える(ステップS11−7、S11−8)。具体的には奥行き値データDnが持つ各画素c bitのデータをcR、cG、cB bitずつ分割し、埋め込みデータZRGBnの下位bitと置き換える(ステップS11−81、S11−82)。
【0065】
置き換えた値は埋め込みデータZRGBnとして出力される(ステップS11−9)。なお下位bitへの奥行き値の埋め込み方法は上記アルゴリズムに限定されることはなく、同様の結果を得られれば良い。
【0066】
図13は本実施例でのエンコード・デコードの例を示す。13−1は入力データを示し、13−11はRGB成分各8bitの輝度値データ、13−12は8bitの奥行き値データである。13−2は埋め込み可能なデータ長を4bitとしたときに演算される埋め込み用の奥行き値データである。13−3は13−11に13−2を埋め込んだデータである。奥行き値を埋め込んだデータ13−3を専用ビューアー13−4を用いてデコードすると、輝度値データ13−51、奥行き値データ13−52の両方を含む出力13−5を得ることができる。ここで輝度値データ13−51は13−3、奥行き値データ13−52は13−2と等価である。デコードされる奥行き値データ13−52は、入力した奥行き値データ13−12を8bitから4bitに変換したため離散的なものに変換される。
【0067】
以上の手順により、カラー画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、奥行き値を埋め込むことが可能となる。
【0068】
[実施例6]
図14は本発明の第6の実施例(請求項4に記載の発明に対応する実施例)のフローを示す図である。以下、図14を用いて詳細な動作の説明を行う。
【0069】
まずカラー画像(横方向x画素、縦方向y画素)の輝度値データ、Tnを読み込む(ステップS19−1)。
【0070】
次に読み込んだカラー画像の輝度値をRGB各成分に付いてa×3bitの画素ごとのデータMRGBnとして割り振る(ステップS14−2、S14−3)。MRGBnはMRn、MGn、MBnより構成され、それぞれがa bit長のカラー画像のR成分、G成分、B成分にあたるデータである。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0071】
次に奥行き値データDnの読み込みを行う(ステップS14−4)。奥行き値データは輝度値データと同じ画像サイズ(横方向x画素、縦方向y画素)を持つb bit(ただしa×3>b)のデータとする。
【0072】
続いて埋め込み用の奥行き値データD’nを、MnおよびDnから演算し(ステップS14−5)、画素ごとに埋め込むbit長を算出する。
【0073】
ところでコンピューターにより画面に表示される画像は通常γ補正が行われて出力される。γの値は指定を行わなくてもOSによって決められた値があり、Windowsでは2.2、Macintoshでは1.8が用いられている。γ値が1より大きいとき画像は明るくなり、小さければ暗くなる。つまり1より大きければ補正式に従って輝度値は入力より出力の方が大きくなる。
【0074】
WindowsとMacintoshの平均値を取ってγ=2.0を選択したとき、最大輝度値における94%の値を入力すれば補正式に従って97%の値で出力される。輝度値データが8bitであるとき、下位3bitは約3%(100%−97%)の変位に相当し、下位4bitは約6%(100%−94%)の変位に相当する。すなわちγ補正による出力を考えると、入力がある程度大きければ4bitの改変を行っても出力としては3bitの改変にしか相当しない。
【0075】
埋め込みデータの作成は次の手順で行う。まず始めに輝度値データMRGBnの各成分の値が低輝度であるときの埋め込みデータのbit長および高輝度であるときの埋め込みデータのbit長を呼び出す(ステップS14−51)。
【0076】
このとき、埋め込みデータのbit長と奥行き値データDnのbit長が異なるため変換を行う。具体的には全ての画素に対して次のような変換作業を行う(ステップS14−52、S14−53)。画素ごとにMRGBnの各成分に埋め込めるデータのbit長を求め、そのbit長の合計を対応する画素の埋め込みデータ長eとする(ステップS14−53〜S14−5351、5352)。Dnが表現可能な最大変位量を、埋め込みデータ長eが表現可能な最大変位量で画素ごとに除算することによりスケール変換を行い、埋め込み用奥行き値データD’nを得る(ステップS14−536、S14−537)。なお専用ビューアーにてデコードを行うときは画素ごとの各成分における上位4bitの値が全て1のとき高輝度側と判断する。
【0077】
続いて輝度値データの下位bitを変換した埋め込み用奥行き値データD’nと置き換えるためのマスクを作成する(ステップS14−6)。マスクはa bit長の長さを持ち、低輝度値側の場合は下位c bitの値が0・残りの上位bitが1、高輝度値側の場合は下位d bitが0・残りの上位bitが1で表される。ここでd>cとする。具体的にはa bit長のデータに0を代入したものを反転し(ステップS14−61、S14−62)それをc bit(またはd bit)だけ右シフト、左シフトの順で操作することにより低輝度用マスクMcと高輝度用マスクMdを作成する(ステップS14−63、S14−64)。
【0078】
ここで作成したマスクを用いて、各々の画素に対応する輝度値の下位bitを奥行き値と置き換える(ステップS14−8)。具体的には輝度値データMRGBnにおいて各成分ごとに低輝度・高輝度の判定を行い、低輝度の成分にはマスクMc、高輝度の成分にはマスクMdを用いて、輝度値データMRGBnの下位bitを埋め込み用奥行き値データD’nを分割したものと置き換える。分割の手順は下位bitより各成分に埋め込み可能なbit長ずつ切り取っていく。
【0079】
置き換えた値は埋め込みデータZRGBnとして出力される(ステップS14−9)。なお下位bitへの奥行き値の埋め込み方法の手順は上記アルゴリズムに限定されることはなく、同様の結果を得られれば適時順序の入れ替えなどを行っても良い。また今回は輝度値データから再現される画像内において輝度が高い画素により多くの情報量を埋め込む演算を行ったが、画像内の各画素に埋め込みデータが目立たないようより多くのデータ埋め込む演算であればよい。例として画像内のエッジ部分などの高周波成分となる画素により多くの情報量を埋め込む演算などがある。
【0080】
以上の手順により、カラー画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、より多くの奥行き値を埋め込むことが可能となる。
【0081】
[実施例7]
図15は本発明の第7の実施例(請求項5に記載の発明に対応する実施例)のフローを示す図である。以下、図15を用いて詳細な動作の説明を行う。
【0082】
まずモノクロ画像(横方向x画素、縦方向y画素)の輝度値データTnを読み込む(ステップS15−1)。
【0083】
次に読み込んだモノクロ画像の輝度値をa bitの画素ごとのデータMnとして割り振る(ステップS15−2、S15−3)。本実施例では一般的な256階調の輝度値を持つモノクロ画像として、a bit=8bitとする。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0084】
次に視差データPnの読み込みを行う(ステップS15−4)。視差データは輝度値データの各画素に対応する視差量を持つp bitのデータである。本実施例ではp bit=1bitとする。また埋め込み可能なbit長をp’ bitとし、p’ bitはp bitと等価またはp+1 bitのbit長を持つ。
【0085】
ここで視差データPn(bit長p)を埋め込み用データP’n(bit長p’)の変換を行う(ステップS15−5)。具体的には、PnをP’nにコピーし、さらに、視差の有無を判定可能とするため、視差がある画素はP’nの最上位bitを立てる(ステップS15−53)。
【0086】
続いて輝度値データの下位bitを埋め込み用データP’nと置き換えるためのマスクを作成する(ステップS15−6)。マスクはa bit長の長さを持ち、下位p’ bitが0、残りの上位bitが1で表される。具体的にはa bit長のデータに0を代入したものを反転し(ステップS15−61、S15−62)、それをp’ bitだけ右シフトした後、p’ bitだけ左シフトすることにより作成する(ステップS15−63、S15−64)。
【0087】
ここで作成したマスクを用いて、輝度値データMnの各々の画素nに対応する輝度値の下位bitを埋め込み用データP’nと置き換える(ステップS15−8)。
【0088】
置き換えた値は埋め込み済みデータZnとして出力される(ステップS15−9)。なお下位bitへの視差の埋め込み方法は上記アルゴリズムに限定されることはなく、同様の結果を得られれば良い。なお視差データの埋め込み手順は上記に限定されるものではなく、同様の結果を得られれば良い。
【0089】
図16は本実施例でのエンコード・デコードの例を示す図である。入力データ16−1は輝度値データ(a=8bit)16−11、視差データ(p=1bit)16−12から構成される。視差データ16−12は図15に示した方法により輝度値データ16−11に埋め込まれ、埋め込み済み画像16−2を得る。視差データ16−12上で黒色で示される部分が視差量0、白色で示される部分が視差量1を示す。なお視差量の値が必ずしも実際の視差と一致する必要は無く、予め指定しておいたパラメータにより変換してもよい。本実施例では1視差量が画像上の10画素を示すものとして予めパラメータを決める。また視差データ16−12の視差量0を視差無しの状態として代用する場合は視差の有無判定用のbitは不要となるため、PnからP’nの変換(S15−5)を省略し、Pn=P’nとしても良い。埋め込みデータ16−2を専用ビューアー16−3でデコードすることにより、出力データ16−4を得る。出力データは右目用画像16−41と左目用画像16−42から構成される。右目用画像16−41は埋め込み済み画像16−2と等価であり、また埋め込まれた視差量1につき10画素右に移動させることにより左目用画像16−42を得ることができる。本実施例では予め決めたパラメータより右目用画像から左目用画像の変換を行ったが、その逆に左目用画像から右目用画像の変換を行うことも容易である。専用ビューアーでデコードする際の情報はヘッダー部に埋め込む。具体的には、本実施例で用いる画像フォーマットをpng形式とし、ヘッダーの付随的ブロック部にあるテキストデータにパラメータ情報を埋め込む。付随的ブロックは通常エンコーダはそれらを書く必要がなく、デコーダはそれを無視してよいという意味でオプションであるため、従来の画像ビューアーの持つデコーダでは解釈されない。またヘッダーにパラメータを埋め込むのではなく、視差量と同様に画像に埋め込んでも良い。具体的には、画面の上下左右の周囲の1ラインずつの輝度値データのいずれかの下位bitをパラメータ記述部と判断する方法などがある。
【0090】
なお本発明の画像フォーマットは上記に限定されるものではなく、データの可逆性を保証するものであれば良い。同様にヘッダーの、データを埋め込むブロックも従来の画像ビューアーのデコードの邪魔にならない位置であればいずれの位置でも良い。
【0091】
以上の手順により、モノクロ画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、視差を埋め込むことが可能となる。
【0092】
[実施例8]
図17は本発明の第8の実施例(請求項6に記載の発明に対応する実施例)のフローを示す図である。以下、図17を用いて詳細な動作の説明を行う。
【0093】
まずモノクロ画像(横方向x画素、縦方向y画素)の輝度値データTnを読み込む(ステップS17−1)。
【0094】
次に読み込んだモノクロ画像の輝度値をa bitの画素ごとのデータMnとして割り振る(ステップS17−2、S17−3)。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0095】
次に視差データPnの読み込みを行う(ステップS17−4)。視差データは輝度値データの各画素に対応する視差量を持つp bitのデータである。本実施例ではp bit=1bitとする。また埋め込み可能なbit長をp’ bitとし、p’ bitはp bitと等価またはp+1 bitのbit長を持つ。
【0096】
ここで視差データPn(bit長p)から埋め込み用データP’n(bit長p’)への変換を行う(ステップS17−5)。具体的には、PnをP’nにコピーし、さらに視差がある画素はP’nの最上位bitを立てる(ステップS17−53)。
【0097】
続いて輝度値データの下位bitを埋め込み用データP’n、と置き換えるためのマスクを作成する(ステップS17−6)。マスクはa bit長の長さを持ち、下位p’ bitが0、残りの上位bitが1で表される。具体的にはa bit長のデータに0を代入したものを反転し(ステップS17−61、S17−62)、それをp’ bitだけ右シフトした後、p’ bitだけ左シフトすることにより作成する(ステップS17−63、S17−64)。
【0098】
ここで作成したマスクを用いて、輝度値データMnの各々の画素nに対応する輝度値の下位bitを埋め込み用データP’nと置き換える(ステップS17−8)。
【0099】
次にオクルージョン部の検出を行う。検出方法を記述する前に、図18を用いてオクルージョン部について説明する。18−1は輝度値データの例、18−2は視差データの例を示している。視差データ18−2上で黒色で示される部分が視差量0、白色で示される部分が視差量1を示す。なお視差量の値が必ずしも実際の視差と一致する必要は無く、デコード時には予め指定しておいたパラメータにより変換してもよい。本実施例では1視差量が画像上の10画素を示し、右方向に移動するものとして予めパラメータを決める。なおこのパラメータは必要な視差画像にあわせて任意に設定すればよい。18−3はパラメータに従ってデコードされた元のデータ18−1に対する視差画像を示している。18−3において白抜けの部分18−31は元のデータ18−1に変換元の画素が無かった部分(画像の移動後にデータが空白となる部分)、つまり元のデータ18−1に対するオクルージョン部である。また18―4は元のデータ18−1において、視差画像18−3への変換時に移動した画素を示している。18−4において白抜けの部分18−41は視差画像18−3に変換先の画素が無かった部分(画像の移動後にかくれる部分)、つまり視差画像18−3に対するオクルージョン部である。ステップS17−9で検出するオクルージョン部は18−31と18−41によって説明した2種類である。具体的に検出を行う場合、単純に移動元の有無および移動先の有無を調べればよい。移動元がない画素の領域は18−31部、移動先が無い画素の領域は18−41部に相当する。
【0100】
次に予め用意された背景画像からオクルージョン部の輝度値データを読み込む(ステップS17−10)。ただしここで輝度値データを読み込むオクルージョン部は18−31部に相当する領域だけである。
【0101】
この読み込んだ輝度値データをステップS17−9で検出した18−41部および視差が無い画素(ステップS17−53でP’nの最上位bitを0とした領域)の下位bitすなわちP’nのうち判定用bitを除いた部分に埋め込む(ステップS17−10)。埋め込み順は左から右へとライン単位で検索を行い検出された18−31部の画素ごとに視差画像に変換後の輝度値を分割し、同様に左から右へとライン単位で検索を行い検出された18−41部および視差が無い画素の下位bitにシーケンシャルに埋め込んでいく。このようにシーケンシャルに埋め込みを行うことにより、画素の位置情報を埋め込まなくても、同様のシーケンシャルな検索によりデコード時に正しい画素位置に輝度値データを復元できる。
【0102】
以上の手順により下位bitを置き換えたものを埋め込みデータZnとして出力する(ステップS17−12)。
【0103】
以上により抜けのない視差画像を再生可能な立体画像データを得ることができる。
【0104】
なお下位bitへの視差の埋め込み方法の手順は上記アルゴリズムに限定されることはなく、同様の結果を得られれば適時順序の入れ替えなどを行っても良い。
【0105】
上記、画像をデコードする際の情報はヘッダー部に埋め込む。具体的には、本実施例で用いる画像フォーマットをpng形式とし、ヘッダーの付随的ブロック部にあるテキスト・データにパラメータ情報を埋め込む。付随的ブロックは通常エンコーダはそれらを書く必要がなく、デコーダはそれを無視してよいという意味でオプションであるため、従来の画像ビューアーの持つデコーダでは解釈されずにそのまま表示される。またヘッダーにパラメータを埋め込むのではなく、視差量と同様に画像に埋め込んでも良い。具体的には、画面の上下左右の周囲の1ラインずつの輝度値データのいずれかの下位bitをパラメータ記述部と判断する方法などがある。なお、本発明の画像フォーマットは上記に限定されるものではなく、データの可逆性を保証するものであれば良い。同様にヘッダーの、データを埋め込むブロックも従来の画像ビューアーのデコードの邪魔にならない位置であればいずれの位置でも良い。
【0106】
以上の手順により、モノクロ画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、視差を埋め込むことが可能となる。
[実施例9]
図19は本発明の第9の実施例(請求項7に記載の発明に対応する実施例)のフローを示す図である。以下、図19を用いて詳細な動作の説明を行う。
【0107】
まずカラー画像(横方向x画素、縦方向y画素)の輝度値データTnを読み込む(ステップS19−1)。
【0108】
次に読み込んだカラー画像の輝度値をRGB各成分に付いてa×3bitの画素ごとのデータMRGBnとして割り振る(ステップS19−2、S19−3)。MRGBnはMRn、MGn、MBnより構成され、それぞれがa bit長のカラー画像のR成分、G成分、B成分にあたるデータである。本実施例では、一般的なRGB成分それぞれ8bitの輝度値を持つカラー画像として、a bit=8bitとする。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0109】
次に視差データPnの読み込みを行う(ステップS19−4)。視差データは輝度値データの各画素に対応する視差量を持つp bitのデータである。本実施例ではp bit=1bitとする。また埋め込み可能なbit長をp’ bitとし、p’ bitはp bitと等価またはp+1 bitのbit長を持つ。本実施例ではp’ bit=2bit=p+1 bitとする。
【0110】
ここで視差データPn(bit長p)を埋め込み用データP’n(bit長p’)の変換を行う(ステップS19−5)。具体的には、PnをP’nにコピーし、さらに視差がある画素はP’nの最上位bitを立てる(ステップS19−53)。
【0111】
続いて輝度値データの下位bitを奥行き値データPnと置き換えるためのマスクを作成する(ステップS19−6)。マスクmRGBはmR、mG、mBより構成され、それぞれa bit長のR成分、G成分、B成分用のマスクである。RGB成分各要素に埋め込めるデータ長をそれぞれp’R、p’G、p’Bとしデータ長の合計はp’ bitと等価(図20)としたとき、mR、mG、mBはそれぞれ下位p’R、p’G、p’B bitが0、残りの上位bitが1で表される。またp’R、p’G、p’Bのbit長の関係はp’G≦p’R≦p’Bかつ、p’Gが上位bit側・p’Bが下位bit側となるようにする(p’Rは中間)。これは人間の視感度の強さが緑、赤、青の順で弱くなることを利用し人間が知覚しにくい成分に、より多くのデータを埋め込むためである。本実施例ではp’G=0bit、p’R=0bit、p’B=2bitとした。
【0112】
ここで作成したマスクを用いて、輝度値データMRGBnの各々の画素nに対応する輝度値の下位bitを埋め込み用データP’nと置き換える(ステップS19−8)。
【0113】
置き換えた値は埋め込みデータZRGBnとして出力される(ステップS19−9)。なお下位bitへの視差の埋め込み方法は上記アルゴリズムに限定されることはなく、同様の結果を得られれば良い。なお視差データの埋め込み手順は上記に限定されるものではなく、同様の結果を得られれば良い。
【0114】
図21は本実施例でのエンコード・デコードの例を示す図である。入力データ21−1は輝度値データ(a=24bit)21−11、視差データ(p=1bit)21−12から構成される。視差データ21−12は図19に示した方法により輝度値データ21−11に埋め込まれ、埋め込み済み画像21−2を得る。視差データ21−12上で黒色で示される部分が視差量0、白色で示される部分が視差量1を示す。なお視差量の値が必ずしも実際の視差と一致する必要は無く、予め指定しておいたパラメータにより変換してもよい。本実施例では1視差量が画像上の10画素を示すものとして予めパラメータを決める。また輝度値データ21−12の視差量0を視差無しの状態として代用する場合はPnからP’nの変換(S19−5)を省略し、Pn=P’nとしても良い。埋め込みデータ21−2を専用ビューアー21−3でデコードすることにより、出力データ21−4を得る。出力データは右目用画像21−41と左目用画像21−42から構成される。右目用画像21−41は埋め込み済み画像21−2と等価であり、また埋め込まれた視差量1につき10画素右に移動させることにより左目用画像21−42を得ることができる。本実施例では予め決めたパラメータより右目用画像から左目用画像の変換を行ったが、その逆に左目用画像から右目用画像の変換を行うことも容易である。専用ビューアーでデコードする際の情報はヘッダー部に埋め込む。具体的には、本実施例で用いる画像フォーマットをpng形式とし、ヘッダーの付随的ブロック部にあるテキスト・データにパラメータ情報を埋め込む。付随的ブロックは通常エンコーダはそれらを書く必要がなく、デコーダはそれを無視してよいという意味でオプションであるため、従来の画像ビューアーの持つデコーダでは解釈されない。またヘッダーにパラメータを埋め込むのではなく、視差量と同様に画像に埋め込んでも良い。具体的には、画面の上下左右の周囲の1ラインずつの輝度値データのいずれかの下位bitをパラメータ記述部と判断する方法などがある。なお、本発明の画像フォーマットは上記に限定されるものではなく、データの可逆性を保証するものであれば良い。同様にヘッダーの、データを埋め込むブロックも従来の画像ビューアーのデコードの邪魔にならない位置であればいずれの位置でも良い。
【0115】
以上の手順により、カラー画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、視差を埋め込むことが可能となる。
【0116】
[実施例10]
図22は本発明の第10の実施例(請求項8に記載の発明に対応する実施例)のフローを示す図である。以下、図22を用いて詳細な動作の説明を行う。
【0117】
まずカラー画像(横方向x画素、縦方向y画素)の輝度値データTnを読み込む(ステップS22−1)。
【0118】
次に読み込んだカラー画像の輝度値をRGB各成分に付いてa×3bitの画素ごとのデータMRGBnとして割り振る(ステップS22−2、S22−3)。MRGBnはMRn、MGn、MBnより構成され、それぞれがa bit長のカラー画像のR成分、G成分、B成分にあたるデータである。このように一度割り振りを行うことにより、輝度値データにパレットが使用されている場合にも対応可能となる。
【0119】
次に視差データPnの読み込みを行う(ステップS22−4)。視差データは輝度値データの各画素に対応する視差量を持つp bitのデータである。本実施例ではp bit=1bitとする。また埋め込み可能なbit長をp’ bitとし、p’ bitはp bitと等価またはp+1 bitのbit長を持つ。
【0120】
ここで視差データPn(bit長p)から埋め込み用データP’n(bit長p’)への変換を行う(ステップS22−5)。具体的には、PnをP’nにコピーし、さらに視差がある画素はP’nの最上位bitを立てる(ステップS2−53)。
【0121】
続いて輝度値データの下位bitを奥行き値データPnと置き換えるためのマスクを作成する(ステップS22−5)。マスクmRGBはmR、mG、mBより構成され、それぞれa bit長のR成分、G成分、B成分用のマスクである。RGB成分各要素に埋め込めるデータ長をそれぞれp’R、p’G、p’Bとしデータ長の合計はp’ bitと等価(図20)としたとき、mR、mG、mBはそれぞれ下位p’R、p’G、p’B bitが0、残りの上位bitが1で表される。またp’R、p’G、p’Bのbit長の関係はp’G≦p’R≦p’Bかつ、p’Gが上位bit側・p’Bが下位bit側となるようにする(p’Rは中間)。これは人間の視感度の強さが緑、赤、青の順で弱くなることを利用し人間が知覚しにくい成分に、より多くのデータを埋め込むためである。
【0122】
ここで作成したマスクを用いて、輝度値データMRGBnの各々の画素nに対応する輝度値の下位bitを埋め込み用データP’nと置き換える(ステップS22−8)。
【0123】
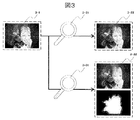
次にオクルージョン部の検出を行う。検出方法を記述する前に、図23を用いてオクルージョン部について説明する。23−1は輝度値データの例、23−2は視差データの例を示している。視差データ23−2上で黒色で示される部分が視差量0、白色で示される部分が視差量1を示す。なお視差量の値が必ずしも実際の視差と一致する必要は無く、デコード時には予め指定しておいたパラメータにより変換してもよい。本実施例では1視差量が画像上の10画素を示し、右方向に移動するものとして予めパラメータを決める。なおこのパラメータは必要な視差画像にあわせて任意に設定すればよい。23−3はパラメータに従ってデコードされた元のデータ23−1に対する視差画像を示している。23−3において白抜けの部分23−31は元のデータ23−1に変換元の画素が無かった部分(画像の移動後にデータが空白となる部分)、つまり元のデータ23−1に対するオクルージョン部である。また23−4は元のデータ23−1において、視差画像23−3への変換時に移動した画素を示している。23−4において白抜けの部分23−41は視差画像23−3に変換先の画素が無かった部分(画像の移動後にかくれる部分)、つまり視差画像23−3に対するオクルージョン部である。ステップS22−9で検出するオクルージョン部は23−31と23−41によって説明した2種類である。具体的に検出を行う場合、単純に移動元の有無および移動先の有無を調べればよい。移動元がない画素の領域は23−31部、移動先が無い画素の領域は23−41部に相当する。
【0124】
次に予め用意された背景画像からオクルージョン部の輝度値データを読み込む(ステップS22−10)。ただしここで輝度値データを読み込むオクルージョン部は23−31部に相当する領域だけである。
【0125】
この読み込んだ輝度値データをステップ22−9で検出した23−41部および視差が無い画素(ステップS22−53でP’nの最上位bitを0とした領域)の下位bitすなわちP’nのうち判定用bitを除いた部分に埋め込む(ステップS22−11)。埋め込み順は左から右へとライン単位で検索を行い検出された23−31部の画素ごとに視差画像に変換後の輝度値を分割し、同様に左から右へとライン単位で検索を行い検出された23−41部および視差が無い画素の下位bitにシーケンシャルに埋め込んでいく。このようにシーケンシャルに埋め込みを行うことにより、画素の位置情報を埋め込まなくても、同様のシーケンシャルな検索によりデコード時に正しい画素位置に輝度値データを復元できる。
【0126】
以上の手順により下位bitを置き換えたものを埋め込みデータZRGBnとして出力する(ステップS22−12)。
【0127】
なお下位bitへの視差の埋め込み方法の手順は上記アルゴリズムに限定されることはなく、同様の結果を得られれば適時順序の入れ替えなどを行っても良い。
【0128】
上記、画像をデコードする際の情報はヘッダー部に埋め込む。具体的には、本実施例で用いる画像フォーマットをpng形式とし、ヘッダーの付随的ブロック部にあるテキスト・データにパラメータ情報を埋め込む。付随的ブロックは通常エンコーダはそれらを書く必要がなく、デコーダはそれを無視してよいという意味でオプションであるため、従来の画像ビューアーの持つデコーダでは解釈されずにそのまま表示される。またヘッダーにパラメータを埋め込むのではなく、視差量と同様に画像に埋め込んでも良い。具体的には、画面の上下左右の周囲の1ラインずつの輝度値データのいずれかの下位bitをパラメータ記述部と判断する方法などがある。
【0129】
なお本発明の画像フォーマットは上記に限定されるものではなく、データの可逆性を保証するものであれば良い。同様にヘッダーの、データを埋め込むブロックも従来の画像ビューアーのデコードの邪魔にならない位置であればいずれの位置でも良い。
【0130】
以上の手順により、カラー画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、視差を埋め込むことが可能となる。
【0131】
[実施例11]
本実施例は実施例2、3、5、6に対応する装置に関する。図24に本実施例の装置の構成図を示す。本実施例の立体情報埋め込み装置24−1は、輝度値データ入力部24−2、奥行き値データ入力部24−3、埋め込みデータ作成部24−4、マスク作成部24−5、下位bit置き換え部24−6、およびデータ出力部24−7を備える。実施例2、3に対応する立体情報埋め込み装置24−1はモノクロデータ処理を行う24−2〜24−7を備え、実施例5、6に対応する立体情報埋め込み装置24−1はカラーデータ処理を行う24−2〜24−7を備える。立体情報埋め込み装置24−1の輝度値データ入力部24−2には輝度値データ24−8が入力され、奥行き値データ入力部24−3には奥行き値データ24−9が入力され、データ出力部24−7から立体画像データ24−10が出力される。
【0132】
次に立体情報埋め込み装置24−1の動作を説明する。輝度値データ入力部24−2が画像の輝度値データ24−8を読み込み、奥行き値データ入力部24−3が奥行き値データ24−9を読み込む。奥行き値データ入力部24−3の出力を用いて埋め込みデータ作成部24−4が埋め込みデータを作成する。マスク作成部24−5が輝度値データの下位bitを埋め込みデータと置き換えるためのマスクを作成する。輝度値データ入力部24−2、埋め込みデータ作成部24−4、およびマスク作成部24−5の出力を用いて下位bit置き換え部24−6が各々の画素に対応する輝度値の下位bitを埋め込みデータと置き換え、置き換えた値をデータ出力部24−7が立体画像データ24−10として出力する。なお、詳細な動作方法は実施例2、3、5、6に記載したとおりである。
【0133】
以下、前記実施例の変形例について説明する。本変形例は実施例1、4に対応する装置に関するものである。本変形例の装置は図24の立体情報埋め込み装置24−1から埋め込みデータ作成部24−4を省略したものである。実施例1に対応する装置はモノクロデータ処理を行う輝度値データ入力部24−2、奥行き値データ入力部24−3、マスク作成部24−5、下位bit置き換え部24−6、およびデータ出力部24−7を備え、奥行き値データ入力部24−3の出力が下位bit置き換え部24−6に入力される。実施例4に対応する装置はカラーデータ処理を行う輝度値データ入力部24−2、奥行き値データ入力部24−3、マスク作成部24−5、下位bit置き換え部24−6、およびデータ出力部24−7を備え、奥行き値データ入力部24−3の出力が下位bit置き換え部24−6に入力される。
【0134】
次に本変形例の立体情報埋め込み装置の動作を説明する。輝度値データ入力部24−2が画像の輝度値データ24−8を読み込み、奥行き値データ入力部24−3が奥行き値データ24−9を読み込む。マスク作成部24−5が輝度値データの下位bitを埋め込みデータと置き換えるためのマスクを作成する。輝度値データ入力部24−2、奥行き値データ入力部24−3、およびマスク作成部24−5の出力を用いて下位bit置き換え部24−6が各々の画素に対応する輝度値の下位bitを埋め込みデータと置き換え、置き換えた値をデータ出力部24−7が立体画像データ24−10として出力する。なお、詳細な動作方法は実施例1、4に記載したとおりである。
【0135】
[実施例12]
本実施例は実施例8、10に対応する装置に関する。図25に本実施例の装置の構成図を示す。本実施例の立体情報埋め込み装置25−1は、輝度値データ入力部25−2、視差データ入力部25−3、埋め込みデータ作成部25−4、マスク作成部25−5、第1の下位bit置き換え部25−6、オクルージョン検出部25−7、背景輝度値データ入力部25−8、輝度値データ分割部25−9、第2の下位bit置き換え部25−10、およびデータ出力部25−11を備える。実施例8に対応する立体情報埋め込み装置25−1はモノクロデータ処理を行う25−2〜25−11を備え、実施例10に対応する立体情報埋め込み装置25−1はカラーデータ処理を行う25−2〜25−11を備える。立体情報埋め込み装置25−1の輝度値データ入力部25−2には輝度値データ25−12が入力され、視差データ入力部25−3には視差データ25−13が入力され、背景輝度値データ入力部25−8には背景輝度値データ25−14が入力され、データ出力部25−11から立体画像データ25−15が出力される。
【0136】
次に立体情報埋め込み装置25−1の動作を説明する。輝度値データ入力部25−2が画像の輝度値データ25−12を読み込み、視差データ入力部25−3が視差データ25−13を読み込む。視差データ入力部25−3の出力を用いて埋め込みデータ作成部25−4が埋め込みデータを作成する。マスク作成部25−5が輝度値データの下位bitを埋め込みデータと置き換えるためのマスクを作成する。輝度値データ入力部25−2、埋め込みデータ作成部25−4、およびマスク作成部25−5の出力を用いて第1の下位bit置き換え部25−6が各々の画素に対応する輝度値の下位bitを埋め込みデータと置き換える。第1の下位bit置き換え部25−6の出力からオクルージョン検出部25−7がオクルージョン部を検出する。一方、背景輝度値データ25−14から背景輝度値データ入力部25−8がオクルージョン部の輝度値データを読み込む。背景輝度値データ入力部から出力された輝度値データを輝度値データ分割部25−9が上位bitから指定されたbit数だけ複数個に分割する。オクルージョン検出部25−7、マスク作成部25−5、および輝度値データ分割部25−9の出力を用いて第2の下位bit置き換え部25−10が視差のない画像の下位bitに分割された輝度値を順次置き換えていき、置き換えたものをデータ出力部25−11が立体画像データ25−15として出力する。なお、詳細な動作方法は実施例8、10に記載したとおりである。
【0137】
以下、前記実施例の変形例について説明する。本変形例は実施例7、9に対応する装置に関するものである。本変形例の装置は図25の立体情報埋め込み装置25−1からオクルージョン検出部25−7、背景輝度値データ入力部25−8、輝度値データ分割部25−9、および第2の下位bit置き換え部25−10を省略したものである。実施例7に対応する装置はモノクロデータ処理を行う輝度値データ入力部25−2、視差データ入力部25−3、埋め込みデータ作成部25−4、マスク作成部25−5、第1の下位bit置き換え部25−6(以下、「下位bit置き換え部25−6」という)、およびデータ出力部25−11を備え、下位bit置き換え部25−6の出力がデータ出力部25−11に入力される。実施例9に対応する装置はカラーデータ処理を行う輝度値データ入力部25−2、視差データ入力部25−3、埋め込みデータ作成部25−4、マスク作成部25−5、下位bit置き換え部25−6、およびデータ出力部25−11を備え、下位bit置き換え部25−6の出力がデータ出力部25−11に入力される。
【0138】
次に本変形例の立体情報埋め込み装置25−1の動作を説明する。輝度値データ入力部25−2が画像の輝度値データ25−12を読み込み、視差データ入力部25−3が視差データ25−13を読み込む。視差データ入力部25−3の出力を用いて埋め込みデータ作成部25−4が埋め込みデータを作成する。マスク作成部25−5が輝度値データの下位bitを埋め込みデータと置き換えるためのマスクを作成する。輝度値データ入力部25−2、埋め込みデータ作成部25−4、およびマスク作成部25−5の出力を用いて下位bit置き換え部25−6が各々の画素に対応する輝度値の下位bitを埋め込みデータと置き換え、置き換えた値をデータ出力部25−11が立体画像データ25−15として出力する。なお、詳細な動作方法は実施例7、9に記載したとおりである。
【0139】
本発明の装置はコンピュータとプログラムによっても実現でき、プログラムを記録媒体に記録することも、ネットワークを通じて提供することも可能である。
【0140】
以上、本発明者によってなされた発明を、前記実施の形態に基づき具体的に説明したが、本発明は、前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲において種々変更可能であることは勿論である。
【0141】
【発明の効果】
本願において開示される発明のうち代表的なものによって得られる効果を簡単に説明すれば、下記の通りである。
【0142】
本発明の請求項1の発明によれば、モノクロ画像において従来の画像データと互換性を保ちながら、データ量をヘッダーを除いて全く増やすことなく奥行き値を埋め込むことが可能となる。
【0143】
請求項2の発明によれば、モノクロ画像において従来の画像データと互換性を保ちながら、データ量をヘッダーを除いて全く増やすことなく高bitの奥行き値を埋め込むことが可能となる。
【0144】
請求項3の発明によれば、カラー画像において従来の画像データと互換性を保ちながら、データ量をヘッダーを除いて全く増やすことなく奥行き値を埋め込むことが可能となる。
【0145】
請求項4の発明によれば、カラー画像において従来の画像データと互換性を保ちながら、データ量をヘッダーを除いて全く増やすことなく高bitの奥行き値を埋め込むことが可能となる。
【0146】
請求項5の発明によれば、モノクロ画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、視差を埋め込むことが可能となる。
【0147】
請求項6の発明によれば、モノクロ画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、視差およびオクルージョン情報を埋め込むことが可能となる。
【0148】
請求項7の発明によれば、カラー画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、視差を埋め込むことが可能となる。
【0149】
請求項8の発明によれば、カラー画像において従来の画像データと互換性を保ちながら、データ量を増やすことなく、視差およびオクルージョン情報を埋め込むことが可能となる。
【図面の簡単な説明】
【図1】本発明の第1の実施例のフローを示す図である。
【図2】本発明の第1の実施例の埋め込み例を示す図(ディスプレイ上に表示された中間調画像の写真を含む、2bitの奥行きデータはディサ処理)である。
【図3】本発明の第1の実施例において、埋め込みデータをビューアーで表示する例を示す図(ディスプレイ上に表示された中間調画像の写真を含む、2bitの奥行きデータはディサ処理)である。
【図4】本発明の第2の実施例のフローを示す図である。
【図5】本発明の第2の実施例において、デコード・エンコードの例を示す図(ディスプレイ上に表示された中間調画像の写真を含む、2bitの奥行きデータはディサ処理)である。
【図6】本発明の第3の実施例のフローを示す図である。
【図7】本発明の第4の実施例のフローを示す図である。
【図8】RGB成分各要素に埋め込めるデータ長の説明図である。
【図9】本発明の第4の実施例の埋め込み例を示す図(ディスプレイ上に表示された中間調画像の写真を含む)である。
【図10】本発明の第4の実施例において、埋め込みデータをビューアーで表示する例を示す図(ディスプレイ上に表示された中間調画像の写真を含む)である。
【図11】本発明の第5の実施例のフローを示す図である。
【図12】RGB成分各要素に埋め込めるデータ長の説明図である。
【図13】本発明の第5の実施例において、デコード・エンコードの例を示す図(ディスプレイ上に表示された中間調画像の写真を含む)である。
【図14】本発明の第6の実施例のフローを示す図である。
【図15】本発明の第7の実施例のフローを示す図である。
【図16】本発明の第7の実施例において、デコード・エンコードの例を示す図(ディスプレイ上に表示された中間調画像の写真を含む)である。
【図17】本発明の第8の実施例のフローを示す図である。
【図18】オクルージョン部の説明図である(ディスプレイ上に表示された中間調画像の写真を含む)。
【図19】本発明の第9の実施例のフローを示す図である。
【図20】RGB成分各要素に埋め込めるデータ長の説明図である。
【図21】本発明の第9の実施例において、デコード・エンコードの例を示す図(ディスプレイ上に表示された中間調画像の写真を含む)である。
【図22】本発明の第10の実施例のフローを示す図である。
【図23】オクルージョン部の説明図(ディスプレイ上に表示された中間調画像の写真を含む)である。
【図24】本発明の第11の実施例の装置の構成図である。
【図25】本発明の第12の実施例の装置の構成図である。
【符号の説明】
2−1…8bitの輝度値データ、2−2…2bitの奥行き値データ、2−3…埋め込み済みデータの例、3−1…埋め込みデータ、3−21…従来型ビューアー、3−22…埋め込みデータを従来型ビューアーで表示した例、3−31…専用ビューアー、3−32…埋め込みデータを専用ビューアーで表示した例、5−1…入力データ、5−11…8bitの輝度値データ、5−12…8bitの奥行き値データ、5−2…変換した奥行き値データ、5−3…埋め込み済みデータ、5−4…専用ビューアー、5−5…出力データ、5−51…デコードされた輝度値データ、5−52…デコードされた奥行き値データ、9−1…RGB成分各8bitの輝度値データ、9−2…4bitの奥行き値データ、9−3…埋め込み済みデータの例、10−1…埋め込みデータ、10−21…従来型ビューアー、10−22…埋め込みデータを従来型ビューアーで表示した例、10−31専用ビューアー、10−32…埋め込みデータを専用ビューアーで表示した例、13−1…入力データ、13−11…RGB成分各8bitの輝度値データ、13−2…8bitの奥行き値データ、13−3…埋め込み済みデータの例、13−4…専用ビューアー、13−5…出力データ、13−51…デーコードされた輝度値データ、13−52…デコードされた奥行き値データ、16−1…入力データ、16−11…輝度値データ、16−12…視差データ、16−2…埋め込み済みデータ、16−3…専用ビューアー、16−4…出力データ、16−41…右目用画像、16−42…左目用画像、18−1…輝度値データ、18−2…視差データ、18−3…視差画像、18−31…視差画像に対する元データのオクルージョン部、18−4…対応点のある画像領域、18−41…元データに対する視差画像のオクルージョン部、21−1…入力データ、21−11…輝度値データ、21−12…視差データ、21−2…埋め込み済みデータ、21−3…専用ビューアー、21−4…出力データ、21−41…右目用画像、21−42…左目用画像、23−1…輝度値データ、23−2…視差データ、23−3…視差画像、23−31…視差画像に対する元データのオクルージョン部、23−4…対応点のある画像領域、23−41…元データに対する視差画像のオクルージョン部、24−1…立体情報埋め込み装置、24−2…輝度値データ入力部、24−3…奥行き値データ入力部、24−4…埋め込みデータ作成部、24−5…マスク作成部、24−6…下位bit置き換え部、24−7…データ出力部、24−8…輝度値データ、24−9…奥行き値データ、24−10…立体画像データ、25−1…立体情報埋め込み装置、25−2…輝度値データ入力部、25−3…視差データ入力部、25−4…埋め込みデータ作成部、25−5…マスク作成部、25−6…第1の下位bit置き換え部、25−7…オクルージョン検出部、25−8…背景輝度値データ、25−9…輝度値データ分割部、25−10…第2の下位bit置き換え部、25−11…データ出力部、25−12…輝度値データ、25−13…視差データ、25−14…背景輝度値データ、25−15…立体画像データ
Claims (18)
- モノクロ画像データに奥行きデータを埋め込む方法であって、
前記モノクロ画像データの画素ごとに輝度値を割り振る第1ステップと、
前記割り振られた輝度値の下位bitを、当該画素に対応する前記奥行きデータに置き換える第2ステップと、
を含むことを特徴とする画像データヘの立体情報埋め込み方法。 - モノクロ画像データに奥行きデータを埋め込む方法であって、
前記モノクロ画像データの画素ごとに輝度値を割り振る第1ステップと、
前記モノクロ画像データと前記奥行きデータとから各画素ごとに第2の奥行きデータを作成する第2ステップと、
前記割り振られた輝度値の下位bitを、当該画素に対応する前記第2の奥行きデータに置き換える第3ステップと、
を含むことを特徴とする画像データヘの立体情報埋め込み方法。 - カラー画像データに奥行きデータを埋め込む方法であって、
前記カラー画像データの画素ごとに赤・緑・青の各輝度値を割り振る第1ステップと、
前記割り振られた赤・緑・青の各輝度値ごとに個別に定められたbit長の下位bitを、当該画素に対応する前記奥行きデータを分割したデータに置き換える第2ステップと、
を含むことを特徴とする画像データヘの立体情報埋め込み方法。 - カラー画像データに奥行きデータを埋め込む方法であって、
前記カラー画像データの画素ごとに赤・緑・青の各輝度値を割り振る第1ステップと、
前記カラー画像データと前記奥行きデータとから各画素ごとに第2の奥行きデータを作成する第2ステップと、
前記割り振られた赤・緑・青の各輝度値ごとに個別に定められたbit長の下位bitを、当該画素に対応する前記第2の奥行きデータを分割したデータに置き換える第3ステップと、
を含むことを特徴とする画像データへの立体情報埋め込み方法。 - モノクロ画像データに視差情報を埋め込む方法であって、
前記モノクロ画像データの画素ごとに輝度値を割り振る第1ステップと、
前記割り振られた輝度値の下位bitの一部を、当該画素に対応する視差の有無を表わすデータに置き換える第2ステップと、
視差のある画素に対して前記輝度値の下位bitのうち前記視差の有無を表わすデータに使用されなかったbitを、当該画素に対応する視差量を表わすデータに置き換える第3ステップと、
を含むことを特徴とする画像データへの立体情報埋め込み方法。 - 請求項5において、
前記モノクロ画像の対になる視差画像上にのみ表示されるオクルージョン画素を抽出する第4ステップと、
前記抽出された順に前記オクルージョン画素の輝度値データの上位bitから所定のbit数分のみを画素ごとに複数のデータに分割する第5ステップと、
視差のない画素に対して前記輝度値の下位bitのうち前記視差の有無を表わすデータに使用されなかったbitを、前記分割されたデータに順次置き換えていく第6ステップと、
をさらに含むことを特徴とする画像データヘの立体情報埋め込み方法。 - カラー画像データに視差情報を埋め込む方法であって、
前記カラー画像データの画素ごとに赤・緑・青の各輝度値を割り振る第1ステップと、
前記割り振られた赤・緑・青の各輝度値ごとに個別に定められたbit長の下位bitの一部を、当該画素に対応する視差の有無を表わすデータに置き換える第2ステップと、
視差のある画素に対して前記赤・緑・青の各輝度値の下位bitのうち前記視差の有無を表わすデータに使用されなかったbitを、当該画素に対応する視差量を表わすデータに置き換える第3ステップと、
を含むことを特徴とする画像データヘの立体情報埋め込み方法。 - 請求項7において、
前記カラー画像の対になる視差画像上にのみ表示されるオクルージョン画素を抽出する第4ステップと、
前記抽出された順に前記オクルージョン画素の赤・緑・青の各輝度値データの上位bitから所定のbit数分のみを画素ごとに複数のデータに分割する第5ステップと、
視差のない画素に対して前記赤・緑・青の各輝度値の下位bitのうち前記視差の有無を表わすデータに使用されなかったbitを、前記分割されたデータに順次置き換えていく第6ステップと、
をさらに含むことを特徴とする画像データへの立体情報埋め込み方法。 - モノクロ画像データに奥行きデータを埋め込む装置であって、
前記モノクロ画像データの画素ごとに輝度値を割り振る手段と、
前記割り振られた輝度値の下位bitを、当該画素に対応する前記奥行きデータに置き換える下位bit置き換え手段と、
を具備することを特徴とする画像データへの立体情報埋め込み装置。 - モノクロ画像データに奥行きデータを埋め込む装置であって、
前記モノクロ画像データの画素ごとに輝度値を割り振る手段と、
前記モノクロ画像データと前記奥行きデータとから各画素ごとに第2の奥行きデータを作成する埋め込みデータ作成手段と、
前記割り振られた輝度値の下位bitを、当該画素に対応する前記第2の奥行きデータに置き換える下位bit置き換え手段と、
を具備することを特徴とする画像データへの立体情報埋め込み装置。 - カラー画像データに奥行きデータを埋め込む装置であって、
前記カラー画像データの画素ごとに赤・緑・青の各輝度値を割り振る手段と、前記割り振られた赤・緑・青の各輝度値ごとに個別に定められたbit長の下位bitを、当該画素に対応する前記奥行きデータを分割したデータに置き換える下位bit置き換え手段と、
を具備することを特徴とする画像データへの立体情報埋め込み装置。 - カラー画像データに奥行きデータを埋め込む装置であって、
前記カラー画像データの画素ごとに赤・緑・青の各輝度値を割り振る手段と、
前記カラー画像データと前記奥行きデータとから各画素ごとに第2の奥行きデータを作成する埋め込みデータ作成手段と、
前記割り振られた赤・緑・青の各輝度値ごとに個別に定められたbit長の下位bitを、当該画素に対応する前記第2の奥行きデータを分割したデータに置き換える下位bit置き換え手段と、
を具備することを特徴とする画像データへの立体情報埋め込み装置。 - モノクロ画像データに視差情報を埋め込む装置であって、
前記モノクロ画像データの画素ごとに輝度値を割り振る手段と、
前記割り振られた輝度値の下位bitの一部を、当該画素に対応する視差の有無を表わすデータに置き換えるとともに、
視差のある画素に対して前記輝度値の下位bitのうち前記視差の有無を表わすデータに使用されなかったbitを、当該画素に対応する視差量を表わすデータに置き換える下位bit置き換え手段と、
を具備することを特徴とする画像データへの立体情報埋め込み装置。 - 請求項13において、
前記モノクロ画像の対となる視差画像上にのみ表示されるオクルージョン画素を抽出するオクルージョン検出手段と、
前記抽出された順に前記オクルージョン画素の輝度値データの上位bitから所定のbit数分のみを画素ごとに複数のデータに分割する輝度値データ分割手段と、
視差のない画素に対して前記輝度値の下位bitのうち前記視差の有無を表わすデータに使用されなかったbitを、前記分割されたデータに順次置き換えていく第2の下位bit置き換え手段と、
をさらに具備することを特徴とする画像データへの立体情報埋め込み装置。 - カラー画像データに視差情報を埋め込む装置であって、
前記カラー画像データの画素ごとに赤・緑・青の各輝度値を割り振る手段と、
前記割り振られた赤・緑・青の各輝度値ごとに個別に定められたbit長の下位bitの一部を、当該画素に対応する視差の有無を表わすデータに置き換えるとともに、
視差のある画素に対して前記赤・緑・青の各輝度値の下位bitのうち前記視差の有無を表わすデータに使用されなかったbitを、当該画素に対応する視差量を表わすデータに置き換える下位bit置き換え手段と、
を具備することを特徴とする画像データへの立体情報埋め込み装置。 - 請求項15において、
前記カラー画像の対となる視差画像上にのみ表示されるオクルージョン画素を抽出するオクルージョン検出手段と、
前記抽出された順に前記オクルージョン画素の赤・緑・青の各輝度値データの上位bitから所定のbit数分のみを画素ごとに複数のデータに分割する輝度値データ分割手段と、
視差のない画素に対して前記赤・緑・青の各輝度値の下位bitのうち前記視差の有無を表わすデータに使用されなかったbitを、前記分割されたデータに順次置き換えていく第2の下位bit置き換え手段と、
をさらに具備することを特徴とする画像データへの立体情報埋め込み装置。 - 請求項1ないし8のいずれかに記載の画像データへの立体情報埋め込み方法におけるステップをコンピュータに実行させるためのプログラムとした
ことを特徴とする画像データヘの立体情報埋め込みプログラム。 - 請求項1ないし8のいずれかに記載の画像データへの立体情報埋め込み方法におけるステップをコンピュータに実行させるためのプログラムとし、該プログラムを記録した
ことを特徴とする画像データへの立体情報埋め込みプログラムを記録したコンピュータ読取り可能な記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003013500A JP4131933B2 (ja) | 2003-01-22 | 2003-01-22 | 画像データへの立体情報埋め込み方法、装置、プログラム、および記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003013500A JP4131933B2 (ja) | 2003-01-22 | 2003-01-22 | 画像データへの立体情報埋め込み方法、装置、プログラム、および記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004227231A true JP2004227231A (ja) | 2004-08-12 |
| JP4131933B2 JP4131933B2 (ja) | 2008-08-13 |
Family
ID=32901811
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003013500A Expired - Fee Related JP4131933B2 (ja) | 2003-01-22 | 2003-01-22 | 画像データへの立体情報埋め込み方法、装置、プログラム、および記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4131933B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006262481A (ja) * | 2005-03-16 | 2006-09-28 | Toshiba Corp | 画像処理装置 |
| JP2007166277A (ja) * | 2005-12-14 | 2007-06-28 | Nippon Telegr & Teleph Corp <Ntt> | 3次元画像情報の伝送方法、送信側装置および受信側装置 |
| WO2012128242A1 (ja) * | 2011-03-18 | 2012-09-27 | ソニー株式会社 | 画像処理装置、画像処理方法、及び、プログラム |
| JP2012231254A (ja) * | 2011-04-25 | 2012-11-22 | Toshiba Corp | 立体映像生成装置及び立体映像生成方法 |
| ITTO20130503A1 (it) * | 2013-06-18 | 2014-12-19 | Sisvel Technology Srl | Metodo e dispositivo per la generazione, memorizzazione, trasmissione, ricezione e riproduzione di mappe di profondita¿ sfruttando le componenti di colore di un¿immagine facente parte di un flusso video tridimensionale |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH033080A (ja) * | 1989-05-31 | 1991-01-09 | Fujitsu Ltd | 画像の構造化による対応付け前処理方式 |
| JPH0715748A (ja) * | 1993-06-24 | 1995-01-17 | Canon Inc | 画像記録再生装置 |
| JPH10145583A (ja) * | 1996-11-14 | 1998-05-29 | Casio Comput Co Ltd | 画像処理装置 |
| JPH11266465A (ja) * | 1997-05-28 | 1999-09-28 | Nippon Telegr & Teleph Corp <Ntt> | 画像伝送/処理方法および装置およびそれらのプログラムを記録した記録媒体 |
| JP2000322576A (ja) * | 1999-05-11 | 2000-11-24 | Toshiba Corp | 3次元画像データ作成方法および3次元画像データを用いた任意視点画像作成方法 |
| JP2001061164A (ja) * | 1999-08-19 | 2001-03-06 | Toshiba Corp | 立体映像信号伝送方法 |
| JP2002135576A (ja) * | 2000-09-19 | 2002-05-10 | Toshiba Tec Corp | 画像処理装置 |
| JP2002152776A (ja) * | 2000-11-09 | 2002-05-24 | Nippon Telegr & Teleph Corp <Ntt> | 距離画像符号化方法及び装置、並びに、距離画像復号化方法及び装置 |
-
2003
- 2003-01-22 JP JP2003013500A patent/JP4131933B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH033080A (ja) * | 1989-05-31 | 1991-01-09 | Fujitsu Ltd | 画像の構造化による対応付け前処理方式 |
| JPH0715748A (ja) * | 1993-06-24 | 1995-01-17 | Canon Inc | 画像記録再生装置 |
| JPH10145583A (ja) * | 1996-11-14 | 1998-05-29 | Casio Comput Co Ltd | 画像処理装置 |
| JPH11266465A (ja) * | 1997-05-28 | 1999-09-28 | Nippon Telegr & Teleph Corp <Ntt> | 画像伝送/処理方法および装置およびそれらのプログラムを記録した記録媒体 |
| JP2000322576A (ja) * | 1999-05-11 | 2000-11-24 | Toshiba Corp | 3次元画像データ作成方法および3次元画像データを用いた任意視点画像作成方法 |
| JP2001061164A (ja) * | 1999-08-19 | 2001-03-06 | Toshiba Corp | 立体映像信号伝送方法 |
| JP2002135576A (ja) * | 2000-09-19 | 2002-05-10 | Toshiba Tec Corp | 画像処理装置 |
| JP2002152776A (ja) * | 2000-11-09 | 2002-05-24 | Nippon Telegr & Teleph Corp <Ntt> | 距離画像符号化方法及び装置、並びに、距離画像復号化方法及び装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006262481A (ja) * | 2005-03-16 | 2006-09-28 | Toshiba Corp | 画像処理装置 |
| JP2007166277A (ja) * | 2005-12-14 | 2007-06-28 | Nippon Telegr & Teleph Corp <Ntt> | 3次元画像情報の伝送方法、送信側装置および受信側装置 |
| WO2012128242A1 (ja) * | 2011-03-18 | 2012-09-27 | ソニー株式会社 | 画像処理装置、画像処理方法、及び、プログラム |
| CN103416064A (zh) * | 2011-03-18 | 2013-11-27 | 索尼公司 | 图像处理设备、图像处理方法和程序 |
| US9445092B2 (en) | 2011-03-18 | 2016-09-13 | Sony Corporation | Image processing apparatus, image processing method, and program |
| JP2012231254A (ja) * | 2011-04-25 | 2012-11-22 | Toshiba Corp | 立体映像生成装置及び立体映像生成方法 |
| ITTO20130503A1 (it) * | 2013-06-18 | 2014-12-19 | Sisvel Technology Srl | Metodo e dispositivo per la generazione, memorizzazione, trasmissione, ricezione e riproduzione di mappe di profondita¿ sfruttando le componenti di colore di un¿immagine facente parte di un flusso video tridimensionale |
| US10038890B2 (en) | 2013-06-18 | 2018-07-31 | Sisvel Technology S.R.L. | Method and device for generating, storing, transmitting, receiving and reproducing depth maps by using the color components of an image belonging to a three-dimensional video stream |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4131933B2 (ja) | 2008-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109219844B (zh) | 在视频优先级与图形优先级之间转换 | |
| JP5734867B2 (ja) | 画像ベースの3dビデオフォーマット | |
| US8570360B2 (en) | Stereoscopic parameter embedding device and stereoscopic image reproducer | |
| KR20030029649A (ko) | 화상 변환 및 부호화 기술 | |
| CN103596009B (zh) | 解码器及解码方法 | |
| JP2024102344A (ja) | 点群符号化方法、点群復号化方法、符号器、復号器及びコンピュータ記憶媒体 | |
| AU2006290431B2 (en) | Image enhancement and compression | |
| CN114902668A (zh) | 用于基于几何形状的点云压缩的量化 | |
| AU2015204927B2 (en) | Techniques for encoding, decoding and representing high dynamic range images | |
| US20020061140A1 (en) | Image processing apparatus and method, program and storage medium | |
| CN1281569A (zh) | 改进的图像转换和编码技术 | |
| JP2007508789A (ja) | ビットアキュレートフィルムグレインシミュレーション技術 | |
| CN104012097A (zh) | 用于压缩和解压缩数据的方法与装置 | |
| CN102819855B (zh) | 二维图像的生成方法及装置 | |
| JP2022528540A (ja) | 点群の処理 | |
| CN1413017A (zh) | 特技效果数据的编码方法 | |
| JP2022533754A (ja) | ボリュメトリック映像の符号化および復号化のための方法、装置、およびコンピュータプログラム製品 | |
| CN1361630A (zh) | 用于无线网络和无线手持式设备的动画压缩方法 | |
| WO2001001348A1 (en) | Image conversion and encoding techniques | |
| JP4131933B2 (ja) | 画像データへの立体情報埋め込み方法、装置、プログラム、および記録媒体 | |
| JP3462867B2 (ja) | 画像圧縮方法および装置、画像圧縮プログラムならびに画像処理装置 | |
| US20040109609A1 (en) | Method for compression and decompression of image data | |
| US11600026B2 (en) | Data processing systems | |
| CN110430423A (zh) | 数据同步方法、系统、装置及可读存储介质 | |
| KR20000029715A (ko) | 화상매핑장치및방법과화상생성장치및방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080311 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080512 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080527 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080529 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110606 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120606 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |