FR2819773A1 - Systeme de direction assistee electrique - Google Patents
Systeme de direction assistee electrique Download PDFInfo
- Publication number
- FR2819773A1 FR2819773A1 FR0100902A FR0100902A FR2819773A1 FR 2819773 A1 FR2819773 A1 FR 2819773A1 FR 0100902 A FR0100902 A FR 0100902A FR 0100902 A FR0100902 A FR 0100902A FR 2819773 A1 FR2819773 A1 FR 2819773A1
- Authority
- FR
- France
- Prior art keywords
- column
- assistance
- speed
- torque
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0484—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures for reaction to failures, e.g. limp home
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/049—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting sensor failures
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
Un systèmed'assistance de direction électrique comporte une colonne de direction(1), un capteur de couple (10) sur la colonne de direction (1) pour mesurerun couple appliqué par un conducteur sur la colonne (1), un moteur(5) électrique qui fournit une assistance à la direction, uncalculateur (4) qui reçoit une information de couple (Cc) par le capteurde couple (10) et qui fournit au moteur (5) une consigne (In) pour qu'il fournisseune force d'assistance (Ca). La force d'assistance est fonction de l'informationde couple (Cc). Selon l'invention, le calculateur reçoit enoutre une information de vitesse de colonne en rotation (Vc) et, lorsque l'informationde couple (Cc) n'est plus disponible, le calculateur (4) passedans un mode refuge dans lequel il détermine la force d'assistance(Ca) en fonction de la vitesse de colonne (Vc).
Description
<Desc/Clms Page number 1>
Système d'assistance de direction électrique.
L'invention concerne un système d'assistance de direction électrique pour véhicule automobile.
On connaît déjà des systèmes d'assistance de direction électrique. Un tel système est montré sur la figure 1 et comporte de manière classique une colonne 1 de direction, une crémaillère 2 qui entraîne le pivotement des roues directrices 7, un pignon, non montré, monté sur la colonne 1 de direction et qui engrène avec la crémaillère 2 et un volant 3 monté sur la colonne et destiné à être manipulé par un conducteur du véhicule. Un dispositif d'assistance comporte un moteur 5 électrique qui entraîne en rotation la colonne 1 de direction par un dispositif mécanique de réduction connu en soi. Le moteur 5 électrique est en général du type à courant continu ou du type sans balais (brushless). Un calculateur 4 détermine une consigne In pour piloter le moteur 5 électrique.
Le système d'assistance comporte également un ensemble de capteur 8 qui comprend un capteur de couple monté sur la colonne 1 de direction pour déterminer le couple Cc appliqué par le conducteur sur le volant, et un capteur de position du volant pour déterminer l'angle de volant Ac. Le calculateur 4 reçoit les informations Cc, Ac issues de ces capteurs, et en outre une information de vitesse du véhicule Vv par un capteur de vitesse de véhicule 9.
En fonction de ces informations, le calculateur 4 détermine une consigne en courant In pour le moteur
<Desc/Clms Page number 2>
électrique. Cette consigne de courant In se traduit par un couple fourni par le moteur sur la colonne 1 de direction, sensiblement proportionnel au courant In. Certains systèmes d'assistance de direction électrique ont un moteur qui agit non pas sur la colonne de direction, mais sur la crémaillère. Dans ce cas, la consigne de courant In se traduit par une force sur la crémaillère sensiblement proportionnelle au courant In.
On connaît par le document JP 6092244 un système d'assistance de direction électrique qui comporte, en plus des éléments précédents, un module de surveillance de défaut du système d'assistance. Quand un défaut est détecté, l'alimentation électrique du système est arrêtée.
Ainsi, quand un défaut survient, aucune assistance n'est plus fournie au conducteur. Ceci est perturbant, voire dangereux, car le conducteur doit manipuler le volant de manière très différente. S'il doit faire face à une situation d'urgence à ce moment, il n'aura pas eu le temps d'apprendre à réagir au nouveau comportement de la direction. Sur certains modèles de véhicule, la manipulation de la direction sans assistance est même pratiquement impossible.
Dans le document JP 9058505, le courant d'alimentation du moteur au moment de la survenue de d'une panne du capteur de couple est graduellement réduit jusqu'à s'annuler. La direction apparaît donc au conducteur de plus en plus lourde. Ceci évite une modification trop brusque du comportement de la direction. Cependant, après un certain temps, aucune
<Desc/Clms Page number 3>
assistance n'est plus fournie.
Le document JP 8258731 propose uniquement de signaler le défaut au conducteur par un voyant sur le tableau de bord.
Le document US 5,927, 430 propose un système d'assistance de direction électrique qui comporte un mode de fonctionnement en cas de défaillance d'un capteur. Dans ce mode, le courant d'assistance est déterminé uniquement en fonction du capteur de couple du volant. Cependant, ce mode de fonctionnement suppose que le défaut ne concerne pas le capteur de couple du volant ou sa transmission au calculateur.
C'est donc un objectif de l'invention de pallier ces problèmes. L'invention vise à fournir un système d'assistance de direction électrique qui continue à fournir un couple d'assistance en cas de défaillance d'un capteur, même si le capteur défaillant est le capteur de couple sur la colonne de direction.
Avec ces objectifs en vue, l'invention a pour objet un système d'assistance de direction électrique comportant une colonne de direction, un capteur de couple sur la colonne de direction pour mesurer un couple appliqué par un conducteur sur la colonne, un moteur électrique qui fournit une assistance à la direction, un calculateur qui reçoit une information de couple par le capteur de couple et qui fournit au moteur une consigne pour qu'il fournisse une force d'assistance, la force d'assistance étant fonction de l'information de couple, caractérisé en ce que le calculateur reçoit en outre une information de
<Desc/Clms Page number 4>
vitesse de colonne en rotation et, lorsque l'information de couple n'est plus disponible, le calculateur passe dans un mode refuge dans lequel il détermine la force d'assistance en fonction de la vitesse de colonne.
Grâce à l'invention, le système fournit toujours une assistance, même en cas de défaillance du capteur de couple. Ainsi, le conducteur n'est pas surpris par une absence d'assistance. En particulier, dans une situation d'urgence face à laquelle le conducteur donne une correction rapide sur le volant, la vitesse de rotation de la colonne imprimée par le conducteur est conséquente et l'assistance fournie par le système est significative.
La vitesse de rotation de la colonne est donnée par un autre capteur que le capteur de couple et qui est déjà présent pour les besoins de l'assistance électrique en fonctionnement normal, ou pour les besoins d'un système de contrôle de trajectoire par exemple. En général, on utilise des capteurs de position, qui sont en général très fiables, desquels on dérive l'information pour obtenir l'information de vitesse de colonne. Elle peut également être calculée à partir des mesures électriques sur le moteur.
Eventuellement, l'information est présente sur un bus numérique qui parcourt le véhicule.
De préférence, dans le mode refuge, le couple est limité à un plafond prédéterminé. Ainsi, il n'y a pas de risque d'effet d'instabilité. En effet, si le couple d'assistance est fort, il est possible que ce couple entraîne la rotation de la colonne de direction alors même que le conducteur n'exerce plus
<Desc/Clms Page number 5>
d'effort sur le volant. De même, si le retour vers la position neutre est rapide, l'assistance accélère ce retour. Comme l'assistance est limitée, la position neutre ne risque pas d'être dépassée.
D'une manière particulière, la force d'assistance est dans le même sens que la vitesse de colonne, sa valeur absolue étant nulle avant un premier seuil prédéterminé de la vitesse de colonne, augmentant linéairement à partir dudit premier seuil prédéterminé jusqu'au plafond prédéterminé de force d'assistance à un deuxième seuil prédéterminé de la vitesse de colonne.
Lorsque le conducteur maintient le véhicule selon une trajectoire rectiligne, seules quelques petites oscillations sont éventuellement données au volant. Ainsi, la vitesse de colonne est inférieure au premier seuil, et aucune assistance n'est fournie dans ces conditions. Au-delà du premier seuil, la force d'assistance est fournie progressivement en augmentant jusqu'au plafond.
De manière préférentielle, le calculateur reçoit en outre une information de vitesse du véhicule, la consigne de couple étant pondérée par un facteur de vitesse du véhicule décroissant en fonction de la vitesse du véhicule. On constate que le besoin d'assistance est plus important à faible vitesse. A vitesse plus importante, il est préférable que l'assistance soit limitée, voire nulle pour éviter des changements de direction trop rapides.
De manière particulière, le facteur de vitesse du véhicule vaut 1 pour une vitesse nulle du
<Desc/Clms Page number 6>
véhicule, décroît linéairement jusqu'à s'annuler pour une vitesse prédéterminée, et reste nul au-delà de la vitesse prédéterminée.
Selon un perfectionnement, le calculateur reçoit en outre une information de position de la colonne, la consigne de couple étant annulée dans une zone morte autour d'une position neutre de la colonne. Ainsi, le risque d'instabilité est encore réduit. En effet, l'assistance disparaît autour de la position neutre correspondant à une trajectoire du véhicule sensiblement rectiligne. L'assistance n'a pas tendance à faire tourner la colonne au-delà de la position neutre, en particulier lors de retour du volant après un virage.
Préférentiellement, les bornes de la zone morte sont comprises entre 20 et 100.
De préférence, la zone morte est comprise entre - 50 et +50 autour de la position neutre.
L'invention sera mieux comprise et d'autres particularités et avantages apparaîtront à la lecture de la description qui va suivre, la description faisant référence aux dessins annexés parmi lesquels : la figure 1 est une vue schématique d'un système d'assistance de direction électrique ; la figure 2 est un schéma fonctionnel d'une commande d'assistance de direction ;

la figure 3 est un schéma fonctionnel d'une commande d'assistance électrique dans un mode refuge conforme à un premier mode de réalisation
la figure 3 est un schéma fonctionnel d'une commande d'assistance électrique dans un mode refuge conforme à un premier mode de réalisation
<Desc/Clms Page number 7>
de l'invention ; la figure 4 est un schéma fonctionnel d'une commande d'assistance électrique dans un mode refuge conforme à un deuxième mode de réalisation de l'invention ; la figure 5 est un graphique représentant une loi de calcul d'un coefficient de vitesse de colonne ; la figure 6 est un graphique représentant une loi de calcul d'un coefficient de vitesse de véhicule ; la figure 7 est un graphique représentant une loi de calcul d'un coefficient de position de colonne.
Un système d'assistance de direction électrique conforme à l'invention reprend la même disposition que celle de l'art antérieur et montrée sur la figure 1.
En se référant à la figure 2, le système conforme à l'invention comporte le calculateur 4, un capteur de vitesse de véhicule 9 qui délivre une information de vitesse de véhicule Vv au calculateur, un capteur de position de la colonne 11 qui délivre une information d'angle de la colonne Ac et un capteur de couple 10 qui délivre une information sur le couple Cc exercé par le conducteur sur la colonne 1 de direction par l'intermédiaire du volant 3. Ces informations sont traitées par le calculateur 4 pour délivrer une consigne de courant In vers le moteur 5 électrique, de préférence à courant continu ou de type sans balais. Le courant reçu par le moteur se traduit de manière sensiblement proportionnelle par un couple Ca appliqué sur la colonne 1 de direction.
<Desc/Clms Page number 8>
De manière connue en soi, le calculateur comporte un module de détection de défaut 41 des capteurs. Par exemple, le module de détection de défaut 41 détecte si les signaux sont en dehors des limites théoriques, ou s'ils subissent des variations aberrantes au regard du système physique qu'ils représentent. Lorsque le module de détection de défaut 41 détermine que le capteur de couple 10 délivre une mauvaise information, il fait passer le calculateur dans un mode refuge. Ce mode refuge est signalé au conducteur par un signal, par exemple visuel ou sonore.
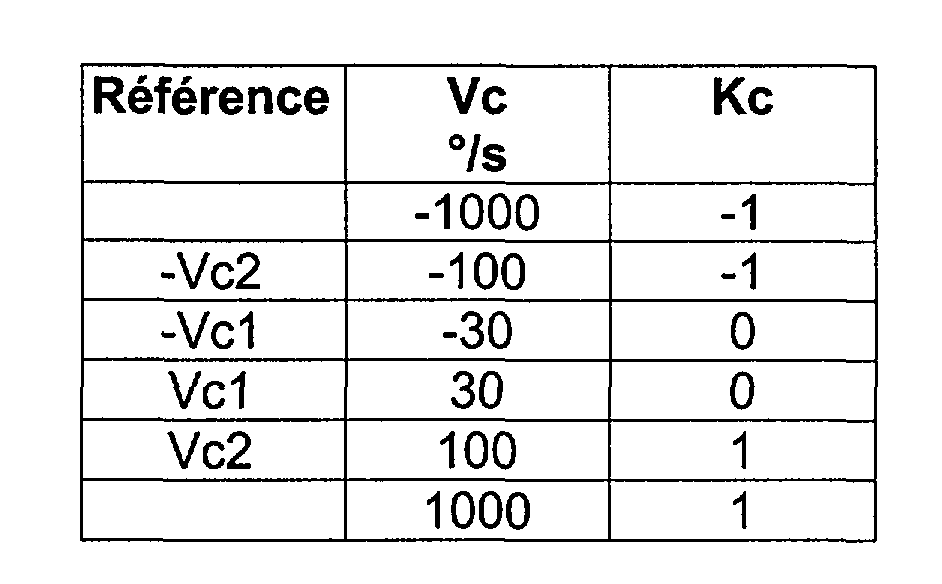
Dans un premier mode de réalisation du mode refuge, montré sur la figure 3, une information de vitesse de colonne Vc est calculée par dérivation de l'information de position de colonne Ac. Un module 20 délivre un coefficient de vitesse de colonne Kc en fonction de la vitesse de colonne Vc. A titre d'exemple, la fonction du module 20 est déterminée par le tableau 1 et est représentée par la figure 5.
<tb>
<tb> Référence <SEP> Vc <SEP> Kc
<tb> Ois
<tb> -1000-1
<tb> -Vc2-100-1
<tb> - <SEP> oc1-30 <SEP> 0
<tb> Vc1 <SEP> 30 <SEP> 0
<tb> Vc2 <SEP> 100 <SEP> 1
<tb> 1000 <SEP> 1
<tb>
<tb> Référence <SEP> Vc <SEP> Kc
<tb> Ois
<tb> -1000-1
<tb> -Vc2-100-1
<tb> - <SEP> oc1-30 <SEP> 0
<tb> Vc1 <SEP> 30 <SEP> 0
<tb> Vc2 <SEP> 100 <SEP> 1
<tb> 1000 <SEP> 1
<tb>
Tableau 1.
Le coefficient Kc est ensuite multiplié par Imax par un module amplificateur 22 pour déterminer une valeur de courant le, Imax étant une valeur de
<Desc/Clms Page number 9>
courant maximale qui détermine le couple maximal applicable en mode refuge.
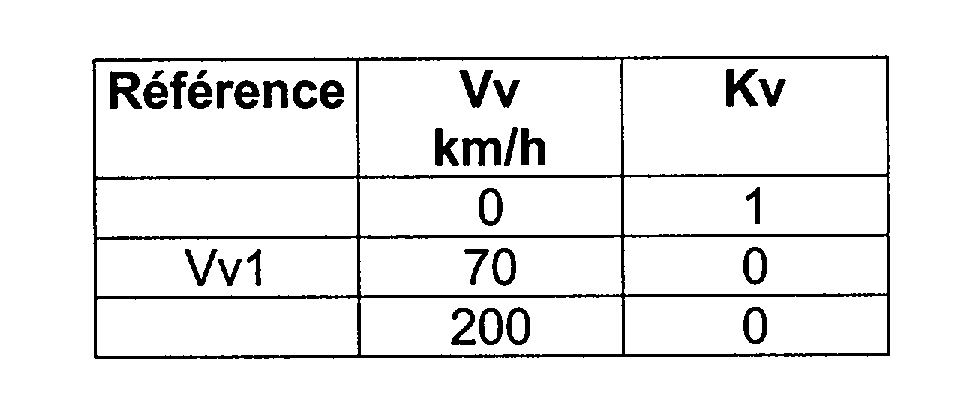
Un module 21 délivre un coefficient de vitesse de véhicule Kv en fonction de la vitesse du véhicule Vv. A titre d'exemple, la fonction du module 21 est déterminée par le tableau 2 et est représentée par la figure 6.
<tb>
<tb>
<tb>
Référence <SEP> Vv <SEP> Kv
<tb> km/h
<tb> 0 <SEP> 1
<tb> Vv1 <SEP> 70 <SEP> 0
<tb> 200 <SEP> 0
<tb>
<tb> km/h
<tb> 0 <SEP> 1
<tb> Vv1 <SEP> 70 <SEP> 0
<tb> 200 <SEP> 0
<tb>
Tableau 2.
Le coefficient de vitesse de véhicule Kv décroît linéairement de 1 pour une vitesse de véhicule nulle à 0 pour une vitesse Vvl. Il reste nul au-delà de Vvl.
Un module mélangeur 23 reçoit d'une part le coefficient Kv et d'autre part la valeur de courant le. Il effectue la multiplication de Ic et Kv pour déterminer le courant de consigne In pour le moteur 5. Nous avons donc : In = Ke x Kv x Imax
Dans un deuxième mode de réalisation, représenté sur la figure 4, toutes les fonctions du premier mode de réalisation sont reprises avec les mêmes références. Le calculateur 4 prend en compte en outre la position de la colonne 1 de direction par l'information de position de colonne Ac pour
Dans un deuxième mode de réalisation, représenté sur la figure 4, toutes les fonctions du premier mode de réalisation sont reprises avec les mêmes références. Le calculateur 4 prend en compte en outre la position de la colonne 1 de direction par l'information de position de colonne Ac pour
<Desc/Clms Page number 10>

introduire une zone morte entre-Ad et Ad dans laquelle aucun couple d'assistance n'est délivré. Un module 24 délivre un coefficient de position Ka en fonction de l'information de position de colonne Ac.
A titre d'exemple, la fonction du module 24 est déterminée par le tableau 3 et est représentée par la figure 7.

<tb>
<tb>
<tb>
Référence <SEP> Ac <SEP> Ka
<tb> 0
<tb> - <SEP> 650 <SEP> 1
<tb> - <SEP> 6 <SEP> 1
<tb> - <SEP> Ad-5 <SEP> 0
<tb> Position <SEP> neutre <SEP> 0 <SEP> 0
<tb> Ad <SEP> 5 <SEP> 0
<tb> 6 <SEP> 1
<tb> 650 <SEP> 1
<tb>
<tb> 0
<tb> - <SEP> 650 <SEP> 1
<tb> - <SEP> 6 <SEP> 1
<tb> - <SEP> Ad-5 <SEP> 0
<tb> Position <SEP> neutre <SEP> 0 <SEP> 0
<tb> Ad <SEP> 5 <SEP> 0
<tb> 6 <SEP> 1
<tb> 650 <SEP> 1
<tb>
Tableau 3.
Le module mélangeur 25 reçoit les coefficients Kv et Ka ainsi que la valeur du courant Ic. Il effectue la multiplication de ces trois valeurs pour déterminer la consigne de courant In. Nous avons donc :

La détermination de la vitesse de colonne est éventuellement effectuée à partir des paramètres du moteur et de la loi physique de fonctionnement des moteurs à courant continu :

avec : I : courant d'induit traversant le moteur,
avec : I : courant d'induit traversant le moteur,
<Desc/Clms Page number 11>
Um : tension aux bornes du moteur, R : résistance rotorique du moteur, wm vitesse angulaire de rotation du moteur, Ke : constante contre-électromotrice,
L : inductance du moteur.
La variation de courant et l'inductance L sont généralement faibles. C'est pourquoi on peut

considérer que le terme L-est négligeable. On en dt déduit donc une estimation de la vitesse de rotation du moteur par :

considérer que le terme L-est négligeable. On en dt déduit donc une estimation de la vitesse de rotation du moteur par :
La vitesse de rotation de la colonne Vc est déduite de la vitesse de rotation du moteur zur par le rapport de réduction entre ces vitesses. La vitesse de rotation de colonne Vc est donc estimée à partir des mesures de tension Um et d'intensité 1 aux bornes du moteur 5. Ces informations sont toujours disponibles car indispensables au pilotage du moteur. Grâce à cette estimation, il est possible de fournir une force d'assistance, même en cas de défaillance simultanée du capteur de couple 10 et du capteur de position 11 ou du capteur de vitesse de colonne 9 de la colonne 11.
L'invention n'est pas limitée au mode réalisation qui vient d'être décrit uniquement à titre d'exemple. En particulier, elle s'applique également au système d'assistance de direction électrique qui agit directement sur la crémaillère.
Claims (8)
1. Système d'assistance de direction électrique comportant une colonne de direction (1), un capteur de couple (10) sur la colonne de direction (1) pour mesurer un couple appliqué par un conducteur sur la colonne (1), un moteur (5) électrique qui fournit une assistance à la direction, un calculateur (4) qui reçoit une information de couple (Cc) par le capteur de couple (10) et, et qui fournit au moteur (5) une consigne (In) pour qu'il fournisse une force d'assistance (Ca), la force d'assistance étant fonction de l'information de couple (Cc), caractérisé en ce que le calculateur (4) reçoit en outre une information de vitesse de colonne (Vc) en rotation et, lorsque l'information de couple (Cc) n'est plus disponible, le calculateur (4) passe dans un mode refuge dans lequel il détermine la force d'assistance (Ca) en fonction de la vitesse de colonne (Vc).
2. Système d'assistance selon la revendication 1, caractérisé en ce que, dans le mode refuge, la force d'assistance (Ca) est limitée à un plafond prédéterminé.
3. Système d'assistance selon la revendication 2, caractérisé en ce que la force d'assistance (Ca) agit dans le même sens que la vitesse de colonne (Vc), sa valeur absolue étant nulle avant un premier seuil prédéterminé (Vcl) de la vitesse de colonne, augmentant linéairement à partir
dudit premier seuil prédéterminé jusqu'au plafond prédéterminé de force d'assistance à un deuxième seuil prédéterminé (Vc2) de la vitesse de colonne
<Desc/Clms Page number 13>
(vac).
4. Système d'assistance selon la revendication 1, caractérisé en ce que le calculateur (4) reçoit en outre une information de vitesse du véhicule (Vv), la consigne de force d'assistance (Ca) étant pondérée par un facteur de vitesse (Kv) du véhicule décroissant en fonction de la vitesse du véhicule (Vv).
5. Système d'assistance selon la revendication 4, caractérisé en ce que le facteur de vitesse (Kv) du véhicule vaut 1 pour une vitesse nulle du véhicule, décroît linéairement jusqu'à s'annuler pour une vitesse prédéterminée (Vvl), et reste nul au-delà de la vitesse prédéterminée (Vvl).
6. Système d'assistance selon la revendication 1, caractérisé en ce que le calculateur (4) reçoit en outre une information de position de la colonne (Ac), la consigne de force d'assistance (Ca) étant annulée dans une zone morte ( [-Acl, Acl]) autour d'une position neutre de la colonne (1).
7. Système d'assistance selon la revendication 6, caractérisé en ce que la zone morte est comprise dans un intervalle dont les bornes (- Ad, Ad) sont comprises entre 20 et 100.
8. Système d'assistance selon la revendication 7, caractérisé en ce que la zone morte est comprise entre -50 (-Ac1) et +50 (Acl) autour de la position neutre.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0100902A FR2819773B1 (fr) | 2001-01-24 | 2001-01-24 | Systeme de direction assistee electrique |
| PCT/FR2002/000200 WO2002058986A1 (fr) | 2001-01-24 | 2002-01-18 | Systeme d'assistance de direction electrique |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0100902A FR2819773B1 (fr) | 2001-01-24 | 2001-01-24 | Systeme de direction assistee electrique |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| FR2819773A1 true FR2819773A1 (fr) | 2002-07-26 |
| FR2819773B1 FR2819773B1 (fr) | 2003-05-23 |
Family
ID=8859152
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| FR0100902A Expired - Fee Related FR2819773B1 (fr) | 2001-01-24 | 2001-01-24 | Systeme de direction assistee electrique |
Country Status (2)
| Country | Link |
|---|---|
| FR (1) | FR2819773B1 (fr) |
| WO (1) | WO2002058986A1 (fr) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2864509A1 (fr) * | 2003-12-25 | 2005-07-01 | Koyo Seiko Co | Systeme de direction assistee electriquement |
| EP2184218A3 (fr) * | 2008-11-10 | 2011-01-12 | JTEKT Corporation | Appareil de direction assistée électrique et son procédé de contrôle |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0692244A (ja) | 1992-09-11 | 1994-04-05 | Toyota Motor Corp | 電動式パワーステアリング装置 |
| JPH08258731A (ja) | 1995-03-24 | 1996-10-08 | Kayaba Ind Co Ltd | 電動パワーステアリング装置 |
| JPH0958505A (ja) | 1995-08-30 | 1997-03-04 | Jidosha Kiki Co Ltd | 電動式パワーステアリング装置 |
| US5927430A (en) | 1997-08-01 | 1999-07-27 | Honda Giken Kogyo Kabushiki Kaisha | Electric power steering apparatus |
| JP2000185660A (ja) * | 1998-12-24 | 2000-07-04 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3652189B2 (ja) * | 1999-10-14 | 2005-05-25 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| US6425454B1 (en) * | 2000-02-16 | 2002-07-30 | Ford Global Technologies, Inc. | Vehicle electric power assist steering system and method using velocity based torque estimation |
-
2001
- 2001-01-24 FR FR0100902A patent/FR2819773B1/fr not_active Expired - Fee Related
-
2002
- 2002-01-18 WO PCT/FR2002/000200 patent/WO2002058986A1/fr not_active Application Discontinuation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0692244A (ja) | 1992-09-11 | 1994-04-05 | Toyota Motor Corp | 電動式パワーステアリング装置 |
| JPH08258731A (ja) | 1995-03-24 | 1996-10-08 | Kayaba Ind Co Ltd | 電動パワーステアリング装置 |
| JPH0958505A (ja) | 1995-08-30 | 1997-03-04 | Jidosha Kiki Co Ltd | 電動式パワーステアリング装置 |
| US5927430A (en) | 1997-08-01 | 1999-07-27 | Honda Giken Kogyo Kabushiki Kaisha | Electric power steering apparatus |
| JP2000185660A (ja) * | 1998-12-24 | 2000-07-04 | Nsk Ltd | 電動パワーステアリング装置の制御装置 |
Non-Patent Citations (2)
| Title |
|---|
| PATENT ABSTRACTS OF JAPAN vol. 1997, no. 07 31 July 1997 (1997-07-31) * |
| PATENT ABSTRACTS OF JAPAN vol. 2000, no. 10 17 November 2000 (2000-11-17) * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2864509A1 (fr) * | 2003-12-25 | 2005-07-01 | Koyo Seiko Co | Systeme de direction assistee electriquement |
| EP2184218A3 (fr) * | 2008-11-10 | 2011-01-12 | JTEKT Corporation | Appareil de direction assistée électrique et son procédé de contrôle |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2002058986A1 (fr) | 2002-08-01 |
| FR2819773B1 (fr) | 2003-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FR2865710A1 (fr) | Systeme electrique de direction assistee et procede a fonction de compensation d'anomalie | |
| FR2897825A1 (fr) | Systeme de direction de vehicule | |
| FR2711601A1 (fr) | Dispositif de commande pour le système de direction assistée commandé par moteur d'un véhicule à moteur. | |
| WO2007045735A1 (fr) | Procede pour determiner en temps reel la tenue d'un volant de conduite d'une direction assistee electrique de vehicule automobile | |
| FR2963918A1 (fr) | Securisation du couple d'assistance par un estimateur d'effort sur la cremaillere | |
| EP1167158A1 (fr) | Direction assistée électrique pour véhicule automobile | |
| FR2958908A1 (fr) | Appareil de direction assistee | |
| EP2307261A2 (fr) | Systeme de direction assistee electrique de vehicule automobile | |
| EP0553010A1 (fr) | Véhicule automobile électrique comportant un dispositif d'entraînement d'une pompe rotative à vide pour un amplificateur pneumatique d'un système de freinage | |
| FR2819773A1 (fr) | Systeme de direction assistee electrique | |
| EP2318261B1 (fr) | Système de direction assistée de véhicule automobile | |
| WO2014049222A1 (fr) | Gestion d'assistance de direction d'un vehicule automobile | |
| FR2870502A1 (fr) | Dispositif de commande de direction assistee electrique et procede de controle de celui-ci | |
| FR2608120A1 (fr) | Mecanisme de direction assistee a commande electrique pour vehicules automobiles | |
| FR3000524A1 (fr) | Dispositif d'adaptation de la commande d'un groupe motopropulseur thermique en fonction des conditions exterieures | |
| EP1172280B1 (fr) | Ensemble de direction assistée électrique pour véhicule automobile | |
| EP2094554B1 (fr) | Procédé pour piloter un groupe électropompe d'un système d'assistance de direction électro-hydraulique pour un véhicule automobile | |
| FR2971221A1 (fr) | Procede de controle d'une assistance de direction | |
| FR2908377A1 (fr) | Dispositif de commande d'un systeme de direction electrique decouplee pour vehicule automobile | |
| FR2821044A1 (fr) | Direction assistee electrique pour vehicule et procede de commande associe | |
| FR2532894A1 (fr) | ||
| EP2834131B1 (fr) | Procede de commande du moteur de direction assistee electrique, dispositif correspondant, direction assistee et vehicule comprenant ledit dispositif | |
| FR2929579A1 (fr) | Dispositif de commande de direction a assistance electrique | |
| FR2837457A1 (fr) | Systeme d'assistance electrique de direction avec amortissement pour un vehicule et son procede de commande | |
| FR2856973A1 (fr) | Procede de commande d'un frein d'un volant d'un systeme de direction decouple d'un vehicule automobile |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TP | Transmission of property | ||
| PLFP | Fee payment |
Year of fee payment: 16 |
|
| PLFP | Fee payment |
Year of fee payment: 17 |
|
| ST | Notification of lapse |
Effective date: 20180928 |