EP4553033A1 - Verschliessvorrichtung zum verschliessen eines behälters mit einem behälterverschluss und verfahren zum überwachen einer verschliessvorrichtung - Google Patents
Verschliessvorrichtung zum verschliessen eines behälters mit einem behälterverschluss und verfahren zum überwachen einer verschliessvorrichtung Download PDFInfo
- Publication number
- EP4553033A1 EP4553033A1 EP24212068.1A EP24212068A EP4553033A1 EP 4553033 A1 EP4553033 A1 EP 4553033A1 EP 24212068 A EP24212068 A EP 24212068A EP 4553033 A1 EP4553033 A1 EP 4553033A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- closing device
- gripping mechanism
- container
- closing
- gripping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/20—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps
- B67B3/2013—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps by carousel-type capping machines
- B67B3/2033—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps by carousel-type capping machines comprising carousel co-rotating capping heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/26—Applications of control, warning, or safety devices in capping machinery
- B67B3/268—Applications of control, warning, or safety devices in capping machinery devices for avoiding damage to the closing machine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/20—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps
- B67B3/2013—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps by carousel-type capping machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/20—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps
- B67B3/204—Linear-type capping machines
- B67B3/2053—Linear-type capping machines comprising capping heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/20—Closing bottles, jars or similar containers by applying caps by applying and rotating preformed threaded caps
- B67B3/2066—Details of capping heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/26—Applications of control, warning, or safety devices in capping machinery
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67B—APPLYING CLOSURE MEMBERS TO BOTTLES JARS, OR SIMILAR CONTAINERS; OPENING CLOSED CONTAINERS
- B67B3/00—Closing bottles, jars or similar containers by applying caps
- B67B3/26—Applications of control, warning, or safety devices in capping machinery
- B67B3/262—Devices for controlling the caps
- B67B3/264—Devices for controlling the caps positioning of the caps
Definitions
- the present invention relates to a closing device for closing a container with a container closure, for example for closing a container with a push-on closure or a screw closure in a beverage filling plant, and to a method for monitoring a closing device for closing a container with a container closure, for example for closing a container with a push-on closure or a screw closure in a beverage filling plant.
- Closing devices for closing containers with a container closure are well known in the art. For example, a container closure fed via a pick wheel is gripped by the pick wheel's clamping jaws of a gripping mechanism and then held on the closing device by the gripping mechanism. The closing head of the closing device, which holds the container closure, is then positioned over the container to be closed and lowered onto it to close the container with the container closure. If a screw closure is to be applied to the container, the closing head undergoes a rotating movement in addition to the lowering movement. The combination of lowering and rotating allows the screw closure to be screwed onto the container.
- the state of the art provides systems that allow the replacement of closure-related components of the closing device, such as parts of the gripping mechanism, to enable the application of container closures of different geometries using the same closing head. Replacing these components is complex.
- the EP 0 876 991 B1 shows a device for screwing a cap onto a container neck, which has gripping means pivotable about horizontal axes and provided with clamping jaws for clamping the cap.
- gripping means pivotable about horizontal axes and provided with clamping jaws for clamping the cap.
- a similar construction is shown by a screwing and rolling head for attaching threaded caps, which is shown in EP 1 908 725 B1 is known.
- the US 5 851 042 A shows a clamping bushing for gripping container lids, which can be quickly exchanged using a locking pin on a closure gripping system.
- the segments of the clamping bushing are bent inward by a pressure cylinder to enable gripping of the container lid.
- the gripping mechanism of a closure device can be actuated by an actuating unit.
- the gripping mechanism can be preloaded into a certain position and moved into another position, such as an open position, by the actuating unit.
- a closing device for closing a container with a container closure for example for closing a container with a push-on closure or a screw closure, in a beverage filling system with the features of claim 1.
- a closing device for closing a container with a container closure for example for closing a container with a push-on closure or a screw closure in a beverage filling plant, comprising a gripping mechanism for gripping the container closure with at least one gripping arm pivotable about a bearing and an actuating unit for actuating the gripping mechanism.
- the closing device further comprises a detection unit for detecting a stroke of a lifting element of the actuating unit acting on the gripping mechanism.
- various parameters can be determined, which in turn allow conclusions to be drawn, for example, about the actual switching times of the gripping mechanism. This can, in turn, be used to achieve higher system performance of a container closing device that includes the closing device.
- the measured stroke can also be used to obtain information regarding the condition monitoring of the closing device, particularly with regard to the parts of the gripping mechanism.
- parameters of the closing device such as the closing time and the opening time, can be automatically determined depending on the type of container closure currently being processed.
- Detecting the stroke also allows conclusions to be drawn about the current wear of the closing device, especially when the currently measured stroke, especially the stroke at the time of closing and/or opening of the gripping mechanism, is compared with values recorded initially, for example, during or shortly after setup. Accordingly, wear limits can be determined to plan or initiate the replacement of wear-prone parts of the closing device.
- the detection of the stroke can be used to detect system errors in the programming, mechanics and/or pneumatics of the closing device and/or the container closing device comprising it.
- the recorded stroke values can also be used to determine further data for the digitalization of the closing process.
- the closing device can optionally comprise an evaluation unit for determining at least one of the above parameters.
- the container closing device can also comprise such an evaluation unit.
- a central system control system for a container treatment system can be provided.
- the detection unit can comprise at least one sensor, for example, a non-contact sensor.
- a non-contact sensor can be, for example, a displacement sensor, for example, in the form of a Hall sensor.
- the actuating unit can be designed as an actuating cylinder.
- the lifting element can be a cylinder piston of the actuating cylinder.
- a reference element can be arranged on the lifting element, optionally extending perpendicular to the stroke direction of the lifting element.
- the reference element can serve as a reference for the sensor used.
- a displacement sensor or distance sensor can measure the distance between itself and the reference element, with the stroke being based on or corresponding to the measured distance or a change in the distance.
- the closing device may further comprise a control unit which is configured to determine at least one state variable of the gripping mechanism based on at least one signal of the detection unit.
- the state variable can be indicative of wear of the gripping mechanism or correspond to wear of the gripping mechanism.
- the control unit can be configured to use the determined state variable to draw conclusions about the condition and/or existing wear of the gripping mechanism and, in turn, to use this state variable as a data basis, for example, to output a warning and/or control signals in response to the processing of the determined state variable.
- control unit can be configured to initiate an adjustment of at least one operating parameter of the closing device based on at least one signal of the detection unit and/or at least one determined state variable, wherein optionally at least one operating parameter is a control point and/or switching time for controlling the lifting element.
- the proposed closing device can be individually adapted. This is particularly advantageous when a plurality of gripping mechanisms or a plurality of closing devices are provided on a container closing device.
- control unit can be configured to output a message, for example a warning message, an error message and/or an information message, for example a status message, based on at least one signal from the detection unit and/or at least one determined state variable.
- the gripping mechanism may comprise a control element displaceable in the direction of the stroke of the lifting element, which control element is coupled to the at least one gripping arm for controlling the position of the at least one gripping arm.
- the closing device may comprise a lifting unit for raising and lowering the gripping mechanism in a displacement direction.
- the lifting unit may comprise a fastening part for fastening to a transport unit of a container treatment device and a relative to the fastening part in a displacement direction displaceable moving part, wherein the moving part is connected to the gripping mechanism.
- the moving part can comprise the actuating unit.
- a particularly simple structure can be achieved if the displacement direction and the lifting direction of the lifting element are oriented parallel, whereby a central longitudinal axis of the moving part and a central axis of the lifting element can be concentric to each other.
- a method for monitoring a closing device for closing a container with a container closure for example for closing a container with a push-on closure or a screw closure in a beverage filling plant, which comprises a gripping mechanism for gripping a container closure with at least one gripping arm pivotable about a bearing and an actuating unit for actuating the gripping mechanism, is proposed.
- a stroke of a lifting element of the actuating unit acting on the gripping mechanism is detected.
- the method allows the advantages and effects described with regard to the closing device to be achieved in an analogous manner. A repetitive description of these is omitted to avoid redundancies.
- At least one state variable of the gripping mechanism can be determined based on the detected stroke.
- the state variable can be indicative of wear of the gripping mechanism or correspond to wear of the gripping mechanism.
- an adjustment of at least one operating parameter the closing device based on the determined stroke and/or at least one determined state variable, an adjustment of at least one operating parameter the closing device, wherein optionally at least one operating parameter is a control point and/or switching time for controlling the lifting element.
- a message for example a warning message, an error message and/or an information message, for example a status message, can be output based on the determined stroke and/or at least one determined state variable.
- Figure 1 is a schematic perspective side view of a container closing device 100 designed in a rotary type for closing containers with one container closure each.
- the container closing device 100 comprises a frame 101 on which a treatment carousel 102 is arranged to rotate about a rotation axis 103.
- the treatment carousel 102 comprises a plurality of closing devices 1 for closing a container with a container closure, which are arranged at equal distances from one another on the circumference of the treatment carousel 102.
- the container closure device 100 comprises a sealing section 104, which serves as a separation between a treatment space designed as a clean room below the sealing section 104 and a grey room above the sealing section 104.
- Figure 2 shows schematically a perspective side view of a closing device 1 of the container closing device 100 from Figure 1 .
- Figure 3 shows a sectional view through a lower part 17 of the closing device 1.
- the closing device 1 is designed and configured for closing a container with a container closure 110, in this case for closing a container with a screw cap 110 in a beverage filling system. It comprises a gripping mechanism 2 for gripping the container closure 110, in this case with three gripping arms 3, each pivotable about a bearing 4.
- the actuating unit 6 is designed and configured to actuate the gripping arms 3 of the gripping mechanism 2.
- the actuating unit 6 controls pivoting of the gripping arms 3.
- the closing device 1 further comprises a detection unit 10 for detecting a stroke of a lifting element 7 acting on the gripping mechanism 2 (see Figure 3 ) of the actuating unit 6, as described below with regard to the Figures 4 and 5 explained in more detail.
- the gripping mechanism 2 further comprises a control element 8 or coupling element which is displaceable in the direction of the stroke of the lifting element 7 and which is coupled to the gripping arms 3 with a control element for controlling the position of the gripping arms 3.
- the gripping arms 3 are each pivotably mounted around the bearing 4. They are coupled to the lifting element 7 via the control element 8 in such a way that a lowering of the lifting element 7, i.e. a movement of the lifting element 7 in the direction of the axis required for receiving the container closure 110 provided space between the gripping arms 3, as indicated by the continuous arrows in Figure 3 indicated, an opening of the gripping mechanism 2, i.e. a pivoting of the gripping arms 3 into an open position, requires.
- the actuating unit 6 is designed as an actuating cylinder and the lifting element 7 is a cylinder piston.
- the closing device 1 comprises a lifting unit 12 for raising and lowering the gripping mechanism 2 in a displacement direction 13.
- the lifting unit 12 comprises a fastening part 14 for fastening to the treatment carousel 102, which represents a transport unit. It further comprises a moving part 15 that can be moved relative to the fastening part 14 in the displacement direction 13.
- the moving part 15 is connected to the gripping mechanism 2 or comprises it and also comprises the actuating unit 6.
- the position of the moving part 15 relative to the fastening part 14 is predetermined by a guide 106 on the frame 101, which is designed here as a slotted guide and on which a guide roller 21 arranged on the moving part 15 is guided.
- the displacement direction 13 (see Figure 2 ) of the stroke direction 16 of the lifting element 7.
- the stroke direction 16 and the displacement direction 13 are thus oriented parallel.
- the displacement direction 13, which represents a central longitudinal axis of the moving part 15, and the stroke direction 16, which represents a central axis of the lifting element 7, are concentric with each other.
- the container closure 110 is held radially by the gripping arms 3. It rests on a stop 5 at its front end, via which the head pressure required to apply the container closure 110 to a container can be applied.
- the closing device 1 is designed for applying a screw cap. Accordingly, a lower part 17 of the moving part 15 is designed to be rotatable about the displacement direction 13. The rotational movement is determined by a motor 18, here an electric motor, which is coupled to the rotatable part 17 of the moving part 15 via a gear 19.
- the turning function is either omitted or blocked.
- the movements of the lifting element 7 and thus the movements of the gripper arms 3 are controlled via a pneumatic connection 20.
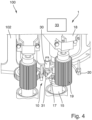
- Figure 4 shows schematically a perspective detailed view of the closing device 1.
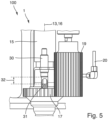
- Figure 5 shows schematically another view of the detail from Figure 4 .
- the closing device 1 further comprises a Figure 4 schematically indicated control unit 33, which is configured to determine at least one state variable of the gripping mechanism 2 based on at least one signal from the detection unit 10.
- state variable is indicative of wear of the gripping mechanism 2.
- the control unit 33 is configured to initiate an adjustment of at least one operating parameter of the closing device 1 based on at least one signal from the detection unit 10 and/or at least one determined state variable.
- the operating parameter can be a control point and/or a switching time for controlling the lifting element.
- the control unit 33 is further configured to perform various To output messages, here warning messages, error messages and information messages, for example status messages.
- control unit 33 or its functionality can alternatively also be at least partially integrated into a central control 105 of the container treatment device 100.
- the method comprises, in a step S10, detecting the stroke of the lifting element 7 of the actuating unit 6 acting on the gripping mechanism 2.
- step S12 at least one state variable of the gripping mechanism 2 is determined based on the detected stroke.
- the state variable is indicative of wear of the gripping mechanism.
- step S14 at least one operating parameter of the closing device is adjusted based on the determined stroke and/or at least one determined state variable.
- the operating parameters are a control point and a switching time for controlling the lifting element 7.
- step S16 a check is made to determine whether a message flag should be activated based on the determined stroke and/or at least one determined state variable. Depending on the activated message flag, a message, for example a warning message, an error message, or an information message, here embodied as a status message, is output (S18).
- a message for example a warning message, an error message, or an information message, here embodied as a status message.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Sealing Of Jars (AREA)
- Filling Of Jars Or Cans And Processes For Cleaning And Sealing Jars (AREA)
Abstract
Die vorliegende Erfindung betrifft eine Verschließvorrichtung (1) zum Verschließen eines Behälters mit einem Behälterverschluss (110), beispielsweise zum Verschließen eines Behälters mit einem Schraubverschluss in einer Getränkeabfüllanlage, umfassend einen Greifmechanismus (2) zum Greifen des Behälterverschlusses (110) mit mindestens einem um eine Lagerung (4) schwenkbaren Greifarm (3) und eine Betätigungseinheit (6) zum Betätigen des Greifmechanismus (2), wobei eine Erfassungseinheit (10) zum Erfassen eines Hubs eines auf den Greifmechanismus (2) wirkenden Hubelements (7) der Betätigungseinheit (6); sie betrifft ferner ein entsprechendes Verfahren.
Description
- Die vorliegende Erfindung betrifft eine Verschließvorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss, beispielsweise zum Verschließen eines Behälters mit einem Aufdrückverschluss oder einem Schraubverschluss in einer Getränkeabfüllanlage, und ein Verfahren zum Überwachen einer Verschließvorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss, beispielsweise zum Verschließen eines Behälters mit einem Aufdrückverschluss oder einem Schraubverschluss in einer Getränkeabfüllanlage.
- Verschließvorrichtungen zum Verschließen von Behältern mit einem Behälterverschluss sind aus dem Stand der Technik hinlänglich bekannt. Hierbei wird beispielsweise ein über ein Pickrad zugeführter Behälterverschluss durch Klemmbacken eines Greifmechanismus von dem Pickrad gegriffen und dann mittels des Greifmechanismus an der Verschließvorrichtung gehalten. Der den Behälterverschluss haltende Verschließerkopf der Verschließvorrichtung wird dann über dem zu verschließenden Behälter positioniert und auf diesen abgesenkt, um den Behälter mit dem Behälterverschluss zu verschließen. Wenn ein Schraubverschluss auf den Behälter aufgebracht werden soll, erfährt der Verschließerkopf zusätzlich zu der Absenkbewegung eine Drehbewegung. Durch die Kombination aus Absenken und Drehen kann der Schaubverschluss auf den Behälter geschraubt werden.
- Des Weiteren sieht der Stand der Technik Systeme vor, die ein Austauschen der verschlussbezogenen Komponenten der Verschließvorrichtung, beispielsweise Teile des Greifmechanismus, ermöglichen, um ein Aufbringen von Behälterverschlüssen unterschiedlicher Geometrie mit dem gleichen Verschließerkopf zu ermöglichen. Das Austauschen dieser Komponenten ist aufwändig.
- Die
EP 0 876 991 B1 zeigt eine Vorrichtung zum Aufschrauben einer Kappe auf einen Behälterhals, welche um horizontale Achsen schwenkbare Greifmittel aufweist, die mit Klemmbacken zum Klemmen der Kappe versehen sind. Einen ähnlichen Aufbau zeigt ein Schraub- und Rollkopf zur Anbringung von Deckeln mit Gewinde, welcher aus derEP 1 908 725 B1 bekannt ist. - Die
US 5 851 042 A zeigt eine Klemmbuchse zum Greifen von Behälterdeckeln, welche mittels eines Sicherungsbolzens an einem Verschlussgreifsystem schnellgewechselt werden kann. Zum Klemmen der Behälterdeckel werden die Segmente der Klemmbuchse mittels eines Druckzylinders nach innen gebogen, um ein Greifen des Behälterdeckels zu ermöglichen. - Der Greifmechanismus einer Verschließvorrichtung kann durch eine Betätigungseinheit betätigt werden. Beispielsweise kann der Greifmechanismus in eine bestimmte Stellung vorgespannt sein und durch die Betätigungseinheit in eine andere Stellung, beispielsweise eine geöffnete Stellung, bewegt werden.
- Der Greifmechanismus, genauer dessen Mechanik und/oder Pneumatik beziehungsweise Hydraulik, unterliegt Verschleiß, beispielsweise durch Abrieb infolge von Relativbewegungen oder beim Greifen und Halten des Behälterverschlusses. Aufgrund des Verschleißes ändern sich mit der Zeit die mechanisch vorgegebenen Schaltzeiten des Greifmechanismus, so dass auf eine Verschließvorrichtung gesehen die Zeitpunkte des Greifens und des Loslassens des Behälterverschlusses vom vorgesehenen Zeitpunkt abweichen können, und über mehrere Verschließvorrichtungen einer Behälterverschließvorrichtung betrachtet die Schaltzeitpunkte zunehmend voneinander abweichen können.
- Zudem wird der Greifmechanismus beim Einrichten einer eine Mehrzahl von Verschließvorrichtungen umfassenden Behälterverschließvorrichtung pauschal über alle Verschließvorrichtungen beziehungsweise Verschließerköpfe gleich parametriert und muss bei einem Sortenwechsel nachjustiert und umgestellt werden. Auch innerhalb der Verschließvorrichtungen einer Behälterverschließvorrichtung kann es bei gleicher Einstellung der Ansteuerzeitpunkte zu unterschiedlichen tatsächlichen Schließzeiten und Öffnungszeiten kommen, beispielsweise aufgrund von unterschiedlich langen Pneumatikleitungen, Leitungsverlusten und/oder Toleranzen beziehungsweise Maßabweichungen bei mechanischen Teilen.
- Ausgehend von dem bekannten Stand der Technik ist es eine Aufgabe der vorliegenden Erfindung, eine verbesserte Verschließvorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss, beispielsweise zum Verschließen eines Behälters mit einem Aufdrückverschluss oder einem Schraubverschluss in einer Getränkeabfüllanlage, sowie ein entsprechendes Verfahren bereitzustellen.
- Die Aufgabe wird durch eine Verschließvorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss, beispielsweise zum Verschließen eines Behälters mit einem Aufdrückverschluss oder einem Schraubverschluss, in einer Getränkeabfüllanlage mit den Merkmalen des Anspruchs 1 gelöst. Vorteilhafte Weiterbildungen ergeben sich aus den Unteransprüchen, der Beschreibung und den Figuren.
- Entsprechend wird eine Verschließvorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss, beispielsweise zum Verschließen eines Behälters mit einem Aufdrückverschluss oder einem Schraubverschluss in einer Getränkeabfüllanlage, vorgeschlagen, umfassend einen Greifmechanismus zum Greifen des Behälterverschlusses mit mindestens einem um eine Lagerung schwenkbaren Greifarm und einer Betätigungseinheit zum Betätigen des Greifmechanismus.
- Genauer, die Betätigungseinheit kann eingerichtet sein zum Betätigen zumindest eines Greifarms des Greifmechanismus, beispielsweise zum Schwenken zumindest eines Greifarms, anders ausgedrückt zum Steuern einer Schwenkposition zumindest eines Greifarms.
- Die Verschließvorrichtung umfasst erfindungsgemäß ferner eine Erfassungseinheit zum Erfassen eines Hubs eines auf den Greifmechanismus wirkenden Hubelements der Betätigungseinheit.
- Mittels der Erfassung des Hubs können diverse Parameter ermittelt werden, die wiederum Rückschlüsse beispielsweise auf die tatsächlichen Schaltzeiten des Greifmechanismus zulassen. Dies kann wiederum genutzt werden, um eine höheren Systemleistung einer die Verschließvorrichtung umfassenden Behälterverschließvorrichtung zu erzielen. Der erfasste Hub kann ferner zur Erlangung von Informationen hinsichtlich einer Zustandsüberwachung der Verschließvorrichtung, insbesondere hinsichtlich der Teile des Greifmechanismus, verwendet werden.
- Durch Verarbeitung des gemessenen Hubs kann eine automatische Ermittlung von Parametern der Verschließvorrichtung, wie beispielsweise die Schließzeit und die Öffnungszeit, je nach Sorte des aktuell verarbeiteten Behälterverschlusses erfolgen.
- Die Erfassung des Hubs erlaubt zudem, Rückschlüsse auf den aktuell vorliegenden Verschleiß der Verschließvorrichtung zu ziehen, insbesondere, wenn der aktuell ermittelte Hub, insbesondere der Hub zum Schließzeitpunkt und/oder zum Zeitpunkt des Öffnens des Greifmechanismus, mit anfangs, beispielsweise beim oder kürzlich nach dem Einrichten erfassten Werten, verglichen wird. Entsprechend ist eine Verschleißgrenzenermittlung möglich, um einen Austausch von verschleißbehafteten Teilen der Verschließvorrichtung zu planen oder auszulösen.
- Zudem kann durch die Erfassung des Hubs ein Detektieren von Systemfehlern in der Programmierung, der Mechanik und/oder der Pneumatik der Verschließvorrichtung und/oder der diese umfassenden Behälterverschließvorrichtung erfolgen.
- Die erfassten Werte des Hubs können zudem zur Ermittlung von weiteren Daten zur Digitalisierung des Verschließprozesses verwendet werden.
- Die Verschließvorrichtung kann optional eine Auswerteinheit zum Ermitteln zumindest eines der vorstehenden Parameter umfassen. Alternativ kann auch die Behälterverschließvorrichtung eine derartige Auswerteeinheit umfassen. Ferner alternativ kann eine zentrale Anlagensteuerung einer Behälterbehandlungsanlage vorgesehen sein.
- Gemäß einer Ausführungsform kann die Erfassungseinheit zumindest einen Sensor, beispielsweise einen berührungslos messenden Sensor, umfassen. Dieser kann beispielsweise ein Wegsensor, beispielsweise ausgebildet in Form eines Hall-Sensors, sein.
- Gemäß einer Ausführungsform kann die Betätigungseinheit als Betätigungszylinder ausgebildet sein. Das Hubelement kann in diesem Falle ein Zylinderkolben des Betätigungszylinders sein.
- Zur einfachen Ermöglichung der Erfassung des Hubes kann an dem Hubelement ein sich optional senkrecht zur Hubrichtung des Hubelements erstreckendes Referenzelement angeordnet sein. Das Referenzelement kann als Referenz für den verwendeten Sensor dienen. Beispielsweise kann ein Wegsensor beziehungsweise Abstandssensor den Abstand zwischen ihm und dem Referenzelement messen, wobei der Hub auf dem gemessenen Abstand beziehungsweise einer Änderung des Abstands basiert beziehungsweise diesem entspricht.
- Gemäß einer Ausführungsform kann die Verschließvorrichtung ferner eine Kontrolleinheit umfassen, die eingerichtet ist, basierend auf zumindest einem Signal der Erfassungseinheit zumindest eine Zustandsgröße des Greifmechanismus zu ermitteln.
- Die Zustandsgröße kann indikativ sein für einen Verschleiß des Greifmechanismus oder einem Verschleiß des Greifmechanismus entsprechen. Anders ausgedrückt kann die Kontrolleinheit eingerichtet sein, über die ermittelte Zustandsgröße Rückschlüsse auf den Zustand und/oder einen vorliegenden Verschleiß des Greifmechanismus zu ziehen und diese Zustandsgröße wiederum als Datengrundlage zu verwenden, um beispielsweise eine Warnung und/oder Steuersignale in Reaktion auf die Verarbeitung der ermittelten Zustandsgröße auszugeben.
- Gemäß einer Ausführungsform kann die Kontrolleinheit eingerichtet sein, basierend auf zumindest einem Signal der Erfassungseinheit und/oder zumindest einer ermittelten Zustandsgröße eine Anpassung zumindest eines Betriebsparameters der Verschließvorrichtung zu veranlassen, wobei optional zumindest ein Betriebsparameter ein Ansteuerpunkt und/oder Schaltzeitpunkt zum Ansteuern des Hubelements ist.
- Entsprechend kann die vorgeschlagene Verschließvorrichtung individuell anpassbar sein. Dies ist insbesondere vorteilhaft, wenn eine Vielzahl von Greifmechanismen beziehungsweise eine Vielzahl von Verschließvorrichtungen an einer Behälterverschließvorrichtung vorgesehen sind.
- Gemäß einer Ausführungsform kann die Kontrolleinheit eingerichtet sein, basierend auf zumindest einem Signal der Erfassungseinheit und/oder zumindest einer ermittelten Zustandsgröße eine Meldung, beispielsweise eine Warnmeldung, eine Fehlermeldung und/oder eine Informationsmeldung, beispielsweise eine Zustandsmeldung, auszugeben.
- Gemäß einer Ausführungsform kann der Greifmechanismus ein in Richtung des Hubs des Hubelements verschiebbares Steuerelement umfassen, das mit dem zumindest einen Greifarm zum Steuern der Position des zumindest einen Greifarms gekoppelt ist.
- Weiterhin kann die Verschließvorrichtung eine Hebeeinheit zum Heben und Absenken des Greifmechanismus in einer Verschieberichtung umfassen.
- Optional kann die Hebeeinheit ein Befestigungsteil zum Befestigen an eine Transporteinheit einer Behälterbehandlungsvorrichtung und ein relativ zum Befestigungsteil in einer Verschieberichtung verschiebbaren Bewegungsteil umfassen, wobei das Bewegungsteil mit dem Greifmechanismus verbunden ist. Das Bewegungsteil kann hierbei die Betätigungseinheit umfassen.
- Ein besonders einfacher Aufbau lässt sich erzielen, wenn die Verschieberichtung und die Hubrichtung des Hubelements parallel orientiert sind, wobei hierbei eine Mittellängsachse des Bewegungsteils und eine Mittelachse des Hubelements konzentrisch zueinander sein können.
- Die oben gestellte Aufgabe wird weiterhin durch ein Verfahren zum Überwachen einer Verschließvorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss, beispielsweise zum Verschließen eines Behälters mit einem Aufdrückverschluss oder einem Schraubverschluss in einer Getränkeabfüllanlage, mit den Merkmalen des Anspruchs 11 gelöst. Vorteilhafte Weiterbildungen des Verfahrens ergeben sich aus den Unteransprüchen sowie der vorliegenden Beschreibung und den Figuren.
- Entsprechend wird ein Verfahren zum Überwachen einer Verschließvorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss, beispielsweise zum Verschließen eines Behälters mit einem Aufdrückverschluss oder einem Schraubverschluss in einer Getränkeabfüllanlage, welche ein Greifmechanismus zum Greifen eines Behälterverschlusses mit mindestens einem um eine Lagerung schwenkbaren Greifarm und eine Betätigungseinheit zum Betätigen des Greifmechanismus umfasst, vorgeschlagen.
- Gemäß dem Verfahren erfolgt ein Erfassen eines Hubs eines auf den Greifmechanismus wirkenden Hubelements der Betätigungseinheit.
- Durch das Verfahren können die hinsichtlich der Verschließvorrichtung beschriebenen Vorteile und Wirkungen in analoger Weise erzielt werden. Auf eine wiederholende Beschreibung derselben wird verzichtet, um Redundanzen zu vermeiden.
- Gemäß einer Weiterbildung des Verfahrens kann basierend auf dem erfassten Hub zumindest eine Zustandsgröße des Greifmechanismus ermittelt werden.
- Gemäß einer Weiterbildung des Verfahrens kann die Zustandsgröße indikativ sein für einen Verschleiß des Greifmechanismus oder einem Verschleiß des Greifmechanismus entsprechen.
- Gemäß einer Weiterbildung des Verfahrens kann basierend auf dem ermittelten Hub und/oder zumindest einer ermittelten Zustandsgröße eine Anpassung zumindest eines Betriebsparameters der Verschließvorrichtung erfolgen, wobei optional zumindest ein Betriebsparameter ein Ansteuerpunkt und/oder Schaltzeitpunkt zum Ansteuern des Hubelements ist.
- Gemäß einer Weiterbildung des Verfahrens kann basierend auf dem ermittelten Hub und/oder zumindest einer ermittelten Zustandsgröße eine Meldung, beispielsweise eine Warnmeldung, eine Fehlermeldung und/oder eine Informationsmeldung, beispielsweise eine Zustandsmeldung, ausgegeben werden.
- Vorteilhafte weitere Ausführungsformen der Erfindung werden durch die nachfolgende Beschreibung der Figuren näher erläutert. Dabei zeigen:
- Figur 1
- schematisch eine perspektivische Seitenansicht auf eine Behälterverschließvorrichtung zum Verschließen von Behältern je mit einem Behälterverschluss;
- Figur 2
- schematisch eine perspektivische Seitenansicht einer Verschließvorrichtung der Behälterverschließvorrichtung aus
Figur 1 ; - Figur 3
- eine Schnittansicht durch einen unteren Teil der Verschließvorrichtung;
- Figur 4
- schematisch eine perspektivische Detailansicht der Verschließvorrichtung;
- Figur 5
- schematisch eine weitere Ansicht des Details aus
Figur 4 ; und - Figur 6
- schematisch ein Ablaufdiagramm eines Verfahrens zum Überwachen der Verschließvorrichtung gemäß der
Figuren 1 bis 5 . - Im Folgenden werden vorteilhafte Ausführungsbeispiele anhand der Figuren beschrieben. Dabei werden gleiche, ähnliche oder gleichwirkende Elemente in den unterschiedlichen Figuren mit identischen Bezugszeichen versehen, und auf eine wiederholte Beschreibung dieser Elemente wird teilweise verzichtet, um Redundanzen zu vermeiden.
- In
Figur 1 ist schematisch eine perspektivische Seitenansicht auf eine in Rundläuferbauweise ausgebildete Behälterverschließvorrichtung 100 zum Verschließen von Behältern mit je einem Behälterverschluss gezeigt. - Die Behälterverschließvorrichtung 100 umfasst ein Gestell 101, am welchem ein Behandlungskarussell 102 um eine Drehachse 103 drehbar angeordnet ist.
- Das Behandlungskarussell 102 umfasst eine Mehrzahl von Verschließvorrichtungen 1 zum Verschließen eines Behälters mit einem Behälterverschluss, die gleichmäßig beabstandet voneinander am Umfang des Behandlungskarussells 102 angeordnet sind.
- Die Behälterverschließvorrichtung 100 umfasst eine Dichtungssektion 104, die als Trennung zwischen einem als Reinraum ausgebildeten Behandlungsraum unterhalb der Dichtungssektion 104 und einem Grauraum oberhalb der Dichtungssektion 104 dient.
-
Figur 2 zeigt schematisch eine perspektivische Seitenansicht einer Verschließvorrichtung 1 der Behälterverschließvorrichtung 100 ausFigur 1 .Figur 3 zeigt eine Schnittansicht durch einen unteren Teil 17 der Verschließvorrichtung 1. - Die Verschließvorrichtung 1 ist ausgebildet und eingerichtet zum Verschließen eines Behälters mit einem Behälterverschluss 110, vorliegend zum Verschließen eines Behälters mit einem Schraubverschluss 110 in einer Getränkeabfüllanlage. Sie umfasst einen Greifmechanismus 2 zum Greifen des Behälterverschlusses 110 mit vorliegend drei je um eine Lagerung 4 schwenkbaren Greifarmen 3.
- Sie umfasst ferner eine Betätigungseinheit 6 zum Betätigen des Greifmechanismus 2.
- Genauer ist die Betätigungseinheit 6 ausgebildet und eingerichtet zum Betätigen der Greifarme 3 des Greifmechanismus 2. Die Betätigungseinheit 6 steuert ein Schwenken der Greifarme 3.
- Die Verschließvorrichtung 1 umfasst weiter eine Erfassungseinheit 10 zum Erfassen eines Hubs eines auf den Greifmechanismus 2 wirkenden Hubelements 7 (siehe
Figur 3 ) der Betätigungseinheit 6, wie weiter unten in Hinblick zu denFiguren 4 und5 näher erläutert. - Der Greifmechanismus 2 umfasst ferner ein in Richtung des Hubs des Hubelements 7 verschiebbares Steuerelement 8 beziehungsweise Koppelelement, das mit den Greifarmen 3 mit einem Steuerelement zum Steuern der Position der Greifarme 3 gekoppelt ist.
- Die Greifarme 3 sind jeweils um die Lagerung 4 schwenkbar gelagert. Sie sind mit dem Hubelement 7 über das Steuerelement 8 gekoppelt, und zwar derart, dass ein Absenken des Hubelements 7, also ein Bewegen des Hubelements 7 in Richtung des für die Aufnahme des Behälterverschlusses 110 vorgesehenen Raums zwischen den Greifarmen 3, wie via der durchgehenden Pfeile in
Figur 3 angedeutet, ein Öffnen des Greifmechanismus 2, also ein Schwenken der Greifarme 3 in eine geöffnete Position, bedingt. Ein Anheben des Hubelements 7, also ein Bewegen des Hubelements 7 von dem für die Aufnahme des Behälterverschlusses 110 vorgesehenen Raums zwischen den Greifarmen 3 weg, wie via der gestrichelten Pfeile inFigur 3 angedeutet, bedingt mithin ein Schließen des Greifmechanismus 2. - Die Betätigungseinheit 6 ist vorliegend als Betätigungszylinder ausgebildet und das Hubelement 7 ist ein Zylinderkolben.
- Die Verschließvorrichtung 1 umfasst eine Hebeeinheit 12 zum Heben und Absenken des Greifmechanismus 2 in einer Verschieberichtung 13. Die Hebeeinheit 12 umfasst ein Befestigungsteil 14 zum Befestigen an das eine Transporteinheit darstellende Behandlungskarussell 102. Es umfasst ferner ein relativ zum Befestigungsteil 14 in der Verschieberichtung 13 verschiebbares Bewegungsteil 15. Das Bewegungsteil 15 ist mit dem Greifmechanismus 2 verbunden beziehungsweise umfasst diesen und umfasst ebenso die Betätigungseinheit 6. Die Position des Bewegungsteils 15 relativ zum Befestigungsteil 14 wird über eine hier als Kulissenführung ausgebildete Führung 106 am Gestell 101 vorgegeben, an welcher eine am Bewegungsteil 15 angeordnete Führungsrolle 21 geführt ist.
- Gemäß dieser Ausführungsform entspricht die Verschieberichtung 13 (siehe
Figur 2 ) der Hubrichtung 16 des Hubelements 7. Die Hubrichtung 16 und die Verschieberichtung 13 sind mithin parallel orientiert. Vorliegend sind zudem die hier eine Mittellängsachse des Bewegungsteils 15 darstellende Verschieberichtung 13 und die hier eine Mittelachse des Hubelements 7 darstellende Hubrichtung16 konzentrisch zueinander. - Der Behälterverschluss 110 ist durch die Greifarme 3 radial gehalten. Stirnseitig stützt er sich an einem Anschlag 5 ab, über welchen auch ein zum Applizieren des Behälterverschlusses 110 auf einen Behälter erforderlicher Kopfdruck aufgebracht werden kann.
- Die Verschließvorrichtung 1 ist wie bereits oben erwähnt zum Aufbringen eines Schraubverschlusses ausgebildet. Entsprechend ist ein unterer Teil 17 des Bewegungsteils 15 um die Verschieberichtung 13 drehbar ausgebildet. Die Drehbewegung wird über einen Motor 18, hier einen Elektromotor, vorgegeben, welcher über ein Getriebe 19 mit dem drehbaren Teil 17 des Bewegungsteils 15 gekoppelt ist.
- Bei einer Ausbildung zum Aufbringen eines Aufdrückverschlusses entfällt die Drehfunktion beziehungsweise ist gesperrt.
- Die Steuerung der Bewegungen des Hubelements 7 und damit die Bewegungen der Greifarme 3 erfolgen über einen Pneumatikanschluss 20.
-
Figur 4 zeigt schematisch eine perspektivische Detailansicht der Verschließvorrichtung 1.Figur 5 zeigt schematisch eine weitere Ansicht des Details ausFigur 4 . - Die bereits oben erwähnte Erfassungseinheit 10 umfasst einen berührungslos messenden Sensor 30, der hier optional als Wegsensor, gemäß dieser optionalen Ausführungsform in Form eines Hall-Sensors, ausgebildet ist.
- Der Sensor 30 ist eingerichtet, einen Weg beziehungsweise Abstand 32 des Sensors 30 zu einem Referenzelement 31 zu erfassen.
- Der Sensor 30 ist am Bewegungsteil 15 angeordnet, in welchem das Hubelement 7 relativ zum Bewegungsteil 15 verschiebbar ist (siehe
Figur 3 ). - Das Referenzelement 31 ist an dem Hubelement 7 senkrecht zur Hubrichtung 16 des Hubelements 7 orientiert angeordnet.
- Die Verschließvorrichtung 1 umfasst ferner eine in
Figur 4 schematisch angedeutete Kontrolleinheit 33, die eingerichtet ist, basierend auf zumindest einem Signal der Erfassungseinheit 10 zumindest eine Zustandsgröße des Greifmechanismus 2 zu ermitteln. - Hier ist die Zustandsgröße indikativ ist für einen Verschleiß des Greifmechanismus 2.
- Die Kontrolleinheit 33 ist eingerichtet, basierend auf zumindest einem Signal der Erfassungseinheit 10 und/oder zumindest einer ermittelten Zustandsgröße eine Anpassung zumindest eines Betriebsparameters der Verschließvorrichtung 1 zu veranlassen.
- Der Betriebsparameter kann ein Ansteuerpunkt und/oder ein Schaltzeitpunkt zum Ansteuern des Hubelements sein.
- Die Kontrolleinheit 33 ist ferner eingerichtet, basierend auf zumindest einem Signal der Erfassungseinheit 10 und/oder zumindest einer ermittelten Zustandsgröße verschiedene Meldungen, hier Warnmeldungen, Fehlermeldungen und Informationsmeldungen, beispielsweise Zustandsmeldungen, auszugeben.
- Die Kontrolleinheit 33 beziehungsweise deren Funktionalität kann alternativ auch zumindest teilweise in eine zentrale Steuerung 105 der Behälterbehandlungsvorrichtung 100 integriert sein.
- Aus
Figur 6 ist ein Verfahren zum Überwachen der Verschließvorrichtung 1 zum Verschließen eines Behälters mit einem Behälterverschluss gemäß der vorstehend genannten Figuren gezeigt. - Das Verfahren umfasst in einem Schritt S10 das Erfassen des Hubs des auf den Greifmechanismus 2 wirkenden Hubelements 7 der Betätigungseinheit 6.
- In Schritt S12 wird basierend auf dem erfassten Hub zumindest eine Zustandsgröße des Greifmechanismus 2 ermittelt.
- Die Zustandsgröße ist indikativ für einen Verschleiß des Greifmechanismus.
- In Schritt S14 erfolgt basierend auf den ermittelten Hub und/oder zumindest einer ermittelten Zustandsgröße eine Anpassung zumindest eines Betriebsparameters der Verschließvorrichtung.
- Gemäß dieser Ausführungsform sind die Betriebsparameter ein Ansteuerpunkt und ein Schaltzeitpunkt zum Ansteuern des Hubelements 7.
- Im Schritt S16 wird geprüft, ob basierend auf dem ermittelten Hub und/oder zumindest einer ermittelten Zustandsgröße eine Meldungsflagge zu aktivieren ist. Je nach aktivierter Meldungsflagge wird eine Meldung, beispielsweise eine Warnmeldung, eine Fehlermeldung oder eine Informationsmeldung, hier ausgebildet als eine Zustandsmeldung, ausgegeben (S18).
- Soweit anwendbar, können alle einzelnen Merkmale, die in den Ausführungsbeispielen dargestellt sind, miteinander kombiniert und/oder ausgetauscht werden, ohne den Bereich der Erfindung zu verlassen.
-
- 1
- Verschließvorrichtung
- 2
- Greifmechanismus
- 3
- Greifarm
- 4
- Lagerung
- 5
- Anschlag
- 6
- Betätigungseinheit
- 7
- Hubelement
- 8
- Steuerteil
- 10
- Erfassungseinheit
- 12
- Hebeeinheit
- 13
- Verschieberichtung
- 14
- Befestigungsteil
- 15
- Bewegungsteil
- 16
- Hubrichtung
- 17
- Unterer, drehbarer Teil
- 18
- Motor
- 19
- Getriebe
- 20
- Pneumatikanschluss
- 21
- Führungsrolle
- 30
- Sensor
- 31
- Referenzelement
- 32
- Abstand
- 33
- Kontrolleinheit
- 100
- Behälterbehandlungsvorrichtung
- 101
- Gestell
- 102
- Behandlungskarussell
- 103
- Drehachse
- 104
- Dichtungssektion
- 105
- Führung
- 110
- Behälterverschluss
Claims (15)
- Verschließvorrichtung (1) zum Verschließen eines Behälters mit einem Behälterverschluss (110), bevorzugt zum Verschließen eines Behälters mit einem Schraubverschluss in einer Getränkeabfüllanlage, umfassend einen Greifmechanismus (2) zum Greifen des Behälterverschlusses (110) mit mindestens einem um eine Lagerung (4) schwenkbaren Greifarm (3) und eine Betätigungseinheit (6) zum Betätigen des Greifmechanismus (2),
gekennzeichnet durch
eine Erfassungseinheit (10) zum Erfassen eines Hubs eines auf den Greifmechanismus (2) wirkenden Hubelements (7) der Betätigungseinheit (6). - Verschließvorrichtung (1) gemäß Anspruch 1, dadurch gekennzeichnet, dass die Erfassungseinheit (10) zumindest einen bevorzugt berührungslos messenden Sensor (30) umfasst, bevorzugt einen Wegsensor, besonders bevorzugt einen Hall-Sensor.
- Verschließvorrichtung (1) gemäß Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Betätigungseinheit (6) als Betätigungszylinder ausgebildet ist und das Hubelement (7) ein Zylinderkolben ist.
- Verschließvorrichtung (1) gemäß einem der vorstehenden Ansprüche, dadurch gekennzeichnet, dass an dem Hubelement (7) ein bevorzugt senkrecht zur Hubrichtung (16) des Hubelements (7) erstreckendes Referenzelement (31) angeordnet ist.
- Verschließvorrichtung (1) gemäß einem der vorstehenden Ansprüche, dadurch gekennzeichnet, dass die Verschließvorrichtung (1) ferner eine Kontrolleinheit (33) umfasst, die eingerichtet ist, basierend auf zumindest einem Signal der Erfassungseinheit (10) zumindest eine Zustandsgröße des Greifmechanismus (2) zu ermitteln.
- Verschließvorrichtung (1) gemäß dem vorstehenden Anspruch, dadurch gekennzeichnet, dass die Zustandsgröße indikativ ist für einen Verschleiß des Greifmechanismus (2) oder einem Verschleiß des Greifmechanismus (2) entspricht.
- Verschließvorrichtung (1) gemäß einem Ansprüche 5 oder 6, dadurch gekennzeichnet, dass die Kontrolleinheit (33) eingerichtet ist, basierend auf zumindest einem Signal der Erfassungseinheit (10) und/oder zumindest einer ermittelten Zustandsgröße eine Anpassung zumindest eines Betriebsparameters der Verschließvorrichtung (1) zu veranlassen, wobei bevorzugt zumindest ein Betriebsparameter ein Ansteuerpunkt und/oder Schaltzeitpunkt zum Ansteuern des Hubelements (7) ist.
- Verschließvorrichtung (1) gemäß einem der Ansprüche 5 bis 7, dadurch gekennzeichnet, dass die Kontrolleinheit (33) eingerichtet ist, basierend auf zumindest einem Signal der Erfassungseinheit (10) und/oder zumindest einer ermittelten Zustandsgröße eine Meldung, bevorzugt eine Warnmeldung, eine Fehlermeldung und/oder eine Informationsmeldung, beispielsweise eine Zustandsmeldung, auszugeben.
- Verschließvorrichtung (1) gemäß einem der vorstehenden Ansprüche, dadurch gekennzeichnet, dass der Greifmechanismus (2) ein in Richtung des Hubs des Hubelements (7) verschiebbares Steuerelement (8) umfasst, das mit dem zumindest einen Greifarm (3) zum Steuern der Position des zumindest einen Greifarms (3) gekoppelt ist.
- Verschließvorrichtung (1) gemäß einem der vorstehenden Ansprüche, dadurch gekennzeichnet, dass die Verschließvorrichtung (1) eine Hebeeinheit (12) zum Heben und Absenken des Greifmechanismus (2) in einer Verschieberichtung (13) umfasst, wobei bevorzugt die Hebeeinheit (12) ein Befestigungsteil (14) zum Befestigen an eine Transporteinheit einer Behälterbehandlungsvorrichtung (100) und ein relativ zum Befestigungsteil (14) in der Verschieberichtung (13) verschiebbares Bewegungsteil (15) umfasst, wobei das Bewegungsteil (15) mit dem Greifmechanismus (2) verbunden ist oder diesem umfasst und bevorzugt die Betätigungseinheit (6) umfasst, wobei bevorzugt die Verschieberichtung (13) und die Hubrichtung (16) des Hubelements (7) parallel orientiert sind, wobei bevorzugt eine Mittellängsachse des Bewegungsteils (15) und eine Mittelachse des Hubelements (7) konzentrisch zueinander sind.
- Verfahren zum Überwachen einer Verschließvorrichtung (1) zum Verschließen eines Behälters mit einem Behälterverschluss (110), bevorzugt zum Verschließen eines Behälters mit einem Aufdrückverschluss oder einem Schraubverschluss in einer Getränkeabfüllanlage, welche einen Greifmechanismus (2) zum Greifen eines Behälterverschlusses (110) mit mindestens einem um eine Lagerung (4) schwenkbaren Greifarm (3) und eine Betätigungseinheit (6) zum Betätigen des Greifmechanismus (2) umfasst,
gekennzeichnet durch
ein Erfassen eines Hubs eines auf den Greifmechanismus (2) wirkenden Hubelements (7) der Betätigungseinheit (6) erfolgt. - Verfahren gemäß dem vorstehenden Anspruch, dadurch gekennzeichnet, dass basierend auf dem erfassten Hub zumindest eine Zustandsgröße des Greifmechanismus (2) ermittelt wird.
- Verfahren gemäß Anspruch 11 oder 12, dadurch gekennzeichnet, dass die Zustandsgröße indikativ ist für einen Verschleiß des Greifmechanismus (2) oder einem Verschleiß des Greifmechanismus (2) entspricht.
- Verfahren gemäß einem Ansprüche 11 bis 13, dadurch gekennzeichnet, dass basierend auf dem ermittelten Hub und/oder zumindest einer ermittelten Zustandsgröße eine Anpassung zumindest eines Betriebsparameters der Verschließvorrichtung (1) erfolgt, wobei bevorzugt zumindest ein Betriebsparameter ein Ansteuerpunkt und/oder Schaltzeitpunkt zum Ansteuern des Hubelements (7) ist.
- Verfahren gemäß einem der Ansprüche 11 bis 14, dadurch gekennzeichnet, dass basierend auf dem ermittelten Hub und/oder zumindest einer ermittelten Zustandsgröße eine Meldung, bevorzugt eine Warnmeldung, eine Fehlermeldung und/oder eine Informationsmeldung, beispielsweise eine Zustandsmeldung, ausgegeben wird.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102023131292.8A DE102023131292A1 (de) | 2023-11-10 | 2023-11-10 | Verschließvorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss und Verfahren zum Überwachen einer Verschließvorrichtung |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4553033A1 true EP4553033A1 (de) | 2025-05-14 |
Family
ID=93462963
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP24212068.1A Pending EP4553033A1 (de) | 2023-11-10 | 2024-11-11 | Verschliessvorrichtung zum verschliessen eines behälters mit einem behälterverschluss und verfahren zum überwachen einer verschliessvorrichtung |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12583723B2 (de) |
| EP (1) | EP4553033A1 (de) |
| CN (1) | CN119976723A (de) |
| DE (1) | DE102023131292A1 (de) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5851042A (en) | 1997-01-09 | 1998-12-22 | Bankuty; Geza E. | Collet for gripping container caps |
| EP0876991B1 (de) | 1997-05-06 | 2003-08-13 | AZIONARIA COSTRUZIONI MACCHINE AUTOMATICHE-A.C.M.A.-S.p.A. | Vorrichtung zum Aufschrauben einer Kappe auf einem Behälterhals |
| WO2003089360A1 (fr) * | 2002-04-22 | 2003-10-30 | Serac Group | Dispositif de vissage de bouchons |
| EP1908725B1 (de) | 2006-10-02 | 2009-12-30 | Arol S.p.A. | Schraub- und Rollkopf zur Anbringung von Deckeln mit Gewinde |
| US20120222387A1 (en) * | 2009-09-14 | 2012-09-06 | Arol S.P.A. | Method and plant for filling bottles or containers with continuous calibration |
| WO2017182453A1 (de) * | 2016-04-18 | 2017-10-26 | Krones Ag | VERSCHLIEßERKOPF ZUM VERSCHLIEßEN EINES BEHÄLTERS MIT EINEM BEHÄLTERVERSCHLUSS |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11124196A (ja) * | 1997-10-22 | 1999-05-11 | Kao Corp | ねじの締付方法及び装置 |
| US20090133537A1 (en) * | 2007-11-26 | 2009-05-28 | Uglum Rick A | Bottle cap remover and assembly methods |
| EP2886508B1 (de) * | 2013-12-20 | 2016-04-13 | CTC Analytics AG | Betätigungsvorrichtung für Schraubdeckel |
| US20150360800A1 (en) * | 2014-06-11 | 2015-12-17 | Windak Inc. | System and method for securing free end of wound cable |
| DE102021127195A1 (de) * | 2021-10-20 | 2023-04-20 | Krones Aktiengesellschaft | Verschließen von Behältern mit Behälterverschlüssen |
| DE102021132348A1 (de) * | 2021-12-08 | 2023-06-15 | Krones Aktiengesellschaft | Vorrichtung zum Verschließen eines Behälters mit einem Behälterverschluss |
-
2023
- 2023-11-10 DE DE102023131292.8A patent/DE102023131292A1/de active Pending
-
2024
- 2024-11-07 CN CN202411581712.7A patent/CN119976723A/zh active Pending
- 2024-11-08 US US18/942,144 patent/US12583723B2/en active Active
- 2024-11-11 EP EP24212068.1A patent/EP4553033A1/de active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5851042A (en) | 1997-01-09 | 1998-12-22 | Bankuty; Geza E. | Collet for gripping container caps |
| EP0876991B1 (de) | 1997-05-06 | 2003-08-13 | AZIONARIA COSTRUZIONI MACCHINE AUTOMATICHE-A.C.M.A.-S.p.A. | Vorrichtung zum Aufschrauben einer Kappe auf einem Behälterhals |
| WO2003089360A1 (fr) * | 2002-04-22 | 2003-10-30 | Serac Group | Dispositif de vissage de bouchons |
| EP1908725B1 (de) | 2006-10-02 | 2009-12-30 | Arol S.p.A. | Schraub- und Rollkopf zur Anbringung von Deckeln mit Gewinde |
| US20120222387A1 (en) * | 2009-09-14 | 2012-09-06 | Arol S.P.A. | Method and plant for filling bottles or containers with continuous calibration |
| WO2017182453A1 (de) * | 2016-04-18 | 2017-10-26 | Krones Ag | VERSCHLIEßERKOPF ZUM VERSCHLIEßEN EINES BEHÄLTERS MIT EINEM BEHÄLTERVERSCHLUSS |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102023131292A1 (de) | 2025-05-15 |
| US12583723B2 (en) | 2026-03-24 |
| CN119976723A (zh) | 2025-05-13 |
| US20250153989A1 (en) | 2025-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3702318B1 (de) | Verschliesserkopf zum verschliessen eines behälters mit einem behälterverschluss | |
| DE60207321T2 (de) | Verschlussvorrichtung und -methode | |
| DE102011055899B4 (de) | Verfahren und eine Vorrichtung zum Handhaben von Probenbehältern | |
| EP0571980B1 (de) | Vorrichtung zum Verschrauben von Gegenständen, insbesondere eines Schraubverschlusses auf einem Behälter | |
| EP0611363B1 (de) | Spulenwechselvorrichtung | |
| DE60107475T2 (de) | Kapselmaschine und -Verfahren | |
| EP2338829B1 (de) | Vorrichtung und Verfahren zum Verschließen von Behältnissen mit Abstandsmessungen | |
| EP2886508B1 (de) | Betätigungsvorrichtung für Schraubdeckel | |
| EP0502822A1 (de) | Vorrichtung zum Verschieben und Schwenken eines Behälter-Verschlusses | |
| EP3871829A1 (de) | Verfahren zum anziehen von schraubverbindungen, mehrfachschraubvorrichtung | |
| DE69025798T2 (de) | Mehrfarbige Flexodruckmaschine mit einer Vorrichtung zum automatischen Auf- und Abladen von Plattenzylindern | |
| EP3360703B2 (de) | Anhängekupplung | |
| DE2442798A1 (de) | Vorrichtung fuer schraubenverbindungen | |
| EP2203377B1 (de) | Verfahren und vorrichtung zum verschliessen von behältnissen | |
| EP4553033A1 (de) | Verschliessvorrichtung zum verschliessen eines behälters mit einem behälterverschluss und verfahren zum überwachen einer verschliessvorrichtung | |
| EP4197962A1 (de) | Vorrichtung zum verschliessen eines behälters mit einem behälterverschluss | |
| DE4419323A1 (de) | Verfahren und Vorrichtung zum Aufschrauben von Verschlüssen auf Behälter | |
| DE102015209378A1 (de) | Verfahren zum Betrieb eines Arbeitsgeräts einer Bohranlage, nach dem Verfahren arbeitendes Arbeitsgerät, Computerprogramm zur Implementierung des Verfahrens, Steuerungseinrichtung mit einer Implementierung des Verfahrens und Bohranlage mit einem solchen Arbeitsgerät | |
| EP0732297A2 (de) | Lagerkörper | |
| EP0063279A1 (de) | Vorrichtung zum Annippeln von Elektroden in einem Elektroofen | |
| EP1126346A2 (de) | Überwachungseinrichtung | |
| EP4647365A1 (de) | Hub-kipp-vorrichtung und verfahren zum betreiben einer hub-kipp-vorrichtung | |
| WO2009153041A1 (de) | Vorrichtung und verfahren zur prüfung der dichtigkeit von verschlusskappen auf medizinischen hohlkörpern | |
| EP1371428A2 (de) | Antiparallelkurbelgetriebe für die Hub- und Senkbewegung der Abzugsvorrichtung an Strangpressanlagen | |
| DE2060770C3 (de) | Verschließvorrichtung zum Verschließen von Flaschen u.dgl |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20251031 |