EP4008679A1 - Gelenkauslegerkran für den offshore-einsatz - Google Patents
Gelenkauslegerkran für den offshore-einsatz Download PDFInfo
- Publication number
- EP4008679A1 EP4008679A1 EP21211889.7A EP21211889A EP4008679A1 EP 4008679 A1 EP4008679 A1 EP 4008679A1 EP 21211889 A EP21211889 A EP 21211889A EP 4008679 A1 EP4008679 A1 EP 4008679A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- boom
- terminal
- downstream end
- articulated jib
- linear actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 87
- 238000011144 upstream manufacturing Methods 0.000 claims description 45
- 230000009347 mechanical transmission Effects 0.000 claims description 12
- 238000012545 processing Methods 0.000 claims description 8
- 230000000087 stabilizing effect Effects 0.000 claims description 7
- 238000004804 winding Methods 0.000 claims description 4
- 229940082150 encore Drugs 0.000 description 10
- 238000013016 damping Methods 0.000 description 9
- 230000006641 stabilisation Effects 0.000 description 8
- 238000011105 stabilization Methods 0.000 description 8
- 241001417494 Sciaenidae Species 0.000 description 7
- 238000013519 translation Methods 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 239000003381 stabilizer Substances 0.000 description 4
- 229920000297 Rayon Polymers 0.000 description 3
- 230000010355 oscillation Effects 0.000 description 3
- 239000002964 rayon Substances 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 238000004590 computer program Methods 0.000 description 2
- 238000013178 mathematical model Methods 0.000 description 2
- 238000012550 audit Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 210000003625 skull Anatomy 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/36—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes mounted on road or rail vehicles; Manually-movable jib-cranes for use in workshops; Floating cranes
- B66C23/52—Floating cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/185—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes for use erecting wind turbines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/04—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack
- B66C13/06—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads
- B66C13/063—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/06—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes with jibs mounted for jibbing or luffing movements
- B66C23/08—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes with jibs mounted for jibbing or luffing movements and adapted to move the loads in predetermined paths
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/02—Devices for facilitating retrieval of floating objects, e.g. for recovering crafts from water
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/48—Automatic control of crane drives for producing a single or repeated working cycle; Programme control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/36—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes mounted on road or rail vehicles; Manually-movable jib-cranes for use in workshops; Floating cranes
- B66C23/52—Floating cranes
- B66C23/53—Floating cranes including counterweight or means to compensate for list, trim, or skew of the vessel or platform
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/64—Jibs
- B66C23/68—Jibs foldable or otherwise adjustable in configuration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/72—Counterweights or supports for balancing lifting couples
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/84—Slewing gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F11/00—Lifting devices specially adapted for particular uses not otherwise provided for
- B66F11/04—Lifting devices specially adapted for particular uses not otherwise provided for for movable platforms or cabins, e.g. on vehicles, permitting workmen to place themselves in any desired position for carrying out required operations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/16—Arrangement of ship-based loading or unloading equipment for cargo or passengers of lifts or hoists
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/82—Luffing gear
Definitions
- the present invention relates to the technical field of maritime cranes, and in particular that of knuckle-boom cranes for offshore application.
- the ship must be equipped with a crane with specific requirements.
- the present invention proposes an articulated jib crane, for offshore application.
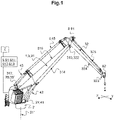
- the articulated boom comprises a main boom (main boom) and a terminal boom (jib), in series, which main boom and which terminal boom each have an upstream end and a downstream end.
- the support structure comprises articulation means (slewing mechanism) for defining a pivoting movement of the articulated jib along a pivot axis (slewing).
- articulation means for defining a pivoting movement of the articulated jib along a pivot axis (slewing).
- downstream end of the main boom and the upstream end of the terminal boom cooperate through downstream articulation means to define a folding movement of said terminal boom along a downstream hinge axis (folding).
- control means comprise an active compensation module (Active 3D Compensation) which is designed to control said maneuvering means, taking into account data coming from a movement acquisition module (MRU - Motion Reference Unit), so to stabilize the downstream end of the terminal arrow, advantageously in a horizontal plane and/or a vertical position, more preferably in all directions.
- Active 3D Compensation an active compensation module which is designed to control said maneuvering means, taking into account data coming from a movement acquisition module (MRU - Motion Reference Unit), so to stabilize the downstream end of the terminal arrow, advantageously in a horizontal plane and/or a vertical position, more preferably in all directions.
- the present invention thus ensures stabilization of the downstream end of the terminal boom by controlling, in combination, the pivoting movement of articulated boom, the oscillating movement of the main boom and the folding movement of the terminal boom.
- said at least one second linear actuator is connected to said support structure and to said terminal boom.
- the folding movement of the terminal boom implemented by said at least one second linear actuator which is connected to the support structure (instead of the main boom), requires reduced power for the movement.
- main boom oscillation This approach is attractive because the oscillating movement of the main boom (lift) consumes most of the energy in trim mode.
- the knuckle-boom crane further comprises a platform which is secured to the downstream end of the terminal jib by means of connection means.
- the active compensation module is designed to control said at least two actuators of said connection means, taking into account data coming from a movement acquisition module, so as to actively stabilize said platform, advantageously in yaw and in pitch.
- the present invention also relates to a machine for offshore application, equipped with an articulated jib crane according to the invention, for example a ship for wind farm operation service (wind farm Service Operation Vessels - SOVs).
- a ship for wind farm operation service wind farm Service Operation Vessels - SOVs.
- the present invention also relates to the aforementioned platform, as such, with its connection means.
- the articulated jib crane 1 according to the invention also called “crane” or “knuckle boom skull” in English, is suitable for offshore applications.
- Such an articulated jib crane 1 is advantageously designed to equip a machine for offshore application (not shown - also called “offshore machine”).
- This crane 1 is thus adapted to be embarked on the “offshore” machine, for example a vessel for operation service (also called “Service Operation Vessel”).
- a vessel for operation service also called “Service Operation Vessel”.
- Machine encompasses in particular marine machinery, in particular ships, for example a ship for wind farm operation service (also called “wind farm Service Operation Vessel” or “wind farm SOV” in English).
- wind farm operation service also called “wind farm Service Operation Vessel” or “wind farm SOV” in English.
- This crane 1 is thus useful, without being limiting, for maneuvering tools and spare parts for work on offshore wind turbines.
- This support structure 2 comprises articulation means 21 (also called “slewing mechanism”), for example a slewing ring with ball bearings, to define a pivoting movement of the articulated boom 3 along a pivot axis 21' (also called “slewing").
- articulation means 21 also called “slewing mechanism”
- slewing mechanism for example a slewing ring with ball bearings
- This pivot axis 21' thus confers a degree of freedom in rotation on the articulated jib 3.
- the support structure 2 and the upstream end 312 of the main boom 31 cooperate via upstream articulation means 35 to define an oscillating movement of said main boom 31 along an upstream articulation axis 35' (also called “luffing” or lifting movement), advantageously horizontal and perpendicular to the pivot axis 21′.
- upstream articulation axis 35' also called “luffing” or lifting movement
- the main jib 31 is intended to be maneuvered in rotation relative to the support structure 2, around this upstream hinge pin 35' located at its upstream end 312.
- downstream end 313 of the main boom 31 and the upstream end 322 of the terminal boom 32 cooperate via downstream articulation means 36 to define a folding movement of said terminal boom 32 along a downstream articulation axis 36' (known as “folding” ink), advantageously horizontal and perpendicular to the pivot axis 21'.
- folding ink
- terminal jib 32 is intended to be maneuvered in rotation relative to the main jib 31, around the downstream hinge pin 36' located at its upstream end 322.
- the upstream 35 and downstream 36 articulation means advantageously consist of articulations, for example in the form of rolling bearings, which are provided between the assembled ends (for example of the bearing/trunnion type).
- the upstream 35' and downstream 36' hinge axes extend parallel to one another, advantageously horizontally.
- the downstream end 323 of the terminal boom 32 is piloted in space by the maneuvering means 4 which are piloted by the control means 5.
- upstream 421, 431 and downstream 422, 432 ends are advantageously assembled within the crane 1 by means of upstream and downstream articulation means which advantageously consist of articulations, for example in the form of rolling bearings (for example of the bearing/trunnion type).
- said at least one pivoting actuator 41 consists for example of a motor member integrated into the support structure 2.
- linear actuators 42, 43 advantageously consist of hydraulic cylinders, preferably associated with a hydraulic unit (not shown).
- the linear actuators 42, 43 can also consist of electric actuators.
- control means 5 are designed to control the maneuvering means 4 so as to stabilize (in space, advantageously along the three axes) the downstream end 323 of the terminal boom 32.
- control means 5 are designed to stabilize the downstream end 323 of the terminal boom 32 in a horizontal plane and/or a vertical position, or even in all directions.
- “Horizontal plane” advantageously means stabilization in the plane defined by the width (x axis or abscissa, horizontal) and the depth (y axis or ordinate).
- vertical position is advantageously meant a stabilization in height (axis z or dimension, vertical).
- all directions we advantageously mean a stabilization in width (axis x or abscissa, horizontal), in depth (axis y or ordinate) and in height (axis z or dimension, vertical).
- control means 5 include an active compensation module 51 (also called “Active 3D Compensation”) which is designed to control the maneuvering means 4, taking into account data from a movement acquisition module 7 (Also called “MRU” for “Motion Reference Unit”), so as to stabilize the downstream end 323 of the terminal boom 32, advantageously in a horizontal plane and/or a vertical position, or even in all directions.
- an active compensation module 51 also called “Active 3D Compensation” which is designed to control the maneuvering means 4, taking into account data from a movement acquisition module 7 (Also called “MRU” for “Motion Reference Unit”), so as to stabilize the downstream end 323 of the terminal boom 32, advantageously in a horizontal plane and/or a vertical position, or even in all directions.
- the active compensation module 51 is thus structured to control the maneuvering means 4 so as to compensate for the movements of the crane 1, and in particular of the downstream end 323 of the terminal jib 32, caused by the waves.
- Such an active compensation module 51 thus offers precise positioning of the downstream end 323 of the terminal boom 32, making it possible to maintain this downstream end 323 of the terminal boom 32 in a constant position.
- control means 5 comprise a computer.
- active compensation module 51 comprises a computer program which comprises instructions which, when said computer program is executed by said computer, form the data collection means 511, the processing means 512 and the control means 513, when run on said computer.
- the active compensation module 51 thus advantageously constitutes a computer-controlled system which makes it possible to maintain the position of the downstream end 323 of the terminal boom 32 (compensating for the movements caused by the waves), by using the maneuvering means 4.
- the operator can pilot the articulated jib crane 1 via the control means 5, during which the movements caused by the waves are compensated by the active compensation module 51.
- the processing means 512 advantageously comprise a mathematical model or algorithm, which determines the control instructions for the maneuvering means 4, which are suitable for stabilizing the downstream end 323 of the terminal boom 32 as a function of the data coming from the control module. acquisition of movements 7 (or, in other words, adapted to compensate for the movements caused by the waves).
- the maneuvering means 4 are controlled by the active compensation module 51 according to the invention so as to maneuver the downstream end 323 of the terminal jib 32, advantageously along the three axes, taking account of the information coming from the movement acquisition module 7 so as to stabilize (in space, advantageously along the three axes) this downstream end 323 of the terminal boom 32.
- the movement acquisition module 7 can be chosen from among the movement acquisition modules 7 known to those skilled in the art.
- Such a movement acquisition module 7, advantageously conventional in itself, is designed to record and evaluate the movements of the machine due to the waves and, as a corollary, the movements of the downstream end 323 of the terminal jib 32.
- This movement acquisition module 7 consists for example of an inertial unit.
- the knuckle boom crane 1 may include this movement acquisition module 7; alternatively, this movement acquisition module 7 can be fitted to the machine.
- the articulated boom 3, illustrated on the figures 1 to 3 is particularly suitable for equipping an articulated jib crane 1 whose control means 5 comprise such an active compensation module 51.
- such an articulated jib 3 according to the invention is intrinsically interesting, possibly to equip an articulated jib crane 1 whose control means 5 do not have such an active compensation module 51 or when the compensation mode 51 is inactivated.
- said at least one second linear actuator 43 here has a particular layout in that it is connected here to the support structure 2 and to the terminal arrow 32.
- said at least one second linear actuator 43 is advantageously connected to the terminal boom 32 via mechanical transmission means 45 (see in particular the picture 3 ).
- said at least one longitudinal arm 461 advantageously extends opposite and along the main boom 31, in particular its upper front wall 315.
- Said at least two oscillating arms 462 (here in the shape of a ladder or of H) are assembled, so as to be mobile in rotation (free to rotate), with the longitudinal arm 461 and the main boom 31.
- the swing arms 462 are assembled here with the upper front wall 315 of the main boom 31.
- the mechanical transmission means 45 further comprise a junction member 47, inserted between the downstream end 4612 of said at least one longitudinal arm 461 and the upstream end 322 of the terminal boom 32.
- This junction member 47 extends the terminal arrow 32 on the side of its upstream end 322.
- the mechanical transmission means 45 comprise a connecting rod-crank assembly, with the intermediate arm 471 forming the connecting rod and the extension section 325 forming the crank.
- said at least one first linear actuator 42 (also called “luffing cylinder”) is arranged between the support structure 2 and the main boom 31.
- Said at least one first linear actuator 42 here extends opposite the lower front wall 314 of the main boom 31.
- said at least one first linear actuator 42 and said at least one second linear actuator 43 are located on either side of the main boom 31, for example facing its lower front wall 314 and its front wall respectively. upper 315.
- the knuckle-boom crane 1 may further comprise a winch drum 8 associated with rotational drive means (not shown, for example at least one motor, advantageously electric or hydraulic) and intended to receive an elongated lifting member 81 (Advantageously a cable, for example a metallic cable or a synthetic cable).
- the winch drum 8 is here carried by the terminal jib 32, at its upper face 325 and on the side of its upstream end 322.
- the articulated jib 3 is advantageously equipped with pulleys 82, here distributed along the terminal jib 32, which are sized, distributed and arranged to order, to guide the elongated lifting member 81 between the winch drum 8 and the load to be lift (not shown).
- the active compensation module 51 is designed to also control the winch drum 8 (in particular its means of driving in rotation), taking into account data coming from the movement acquisition module 7, from so as to control the winding (and unwinding) movement of the winch drum 8.
- the winch drum 8 can be used to smooth the vertical trim, to maintain the vertical position of the free end of the elongated hoist 81.
- This approach offers the advantage of allowing a second-order, vertical (height) correction in combination with the movements of the articulated boom 3.
- the stabilization of the downstream end 323 of the terminal jib 32 (by controlling the maneuvering means 4) is coordinated with the winding movement of the winch drum 8.
- the active compensation module 51 thus advantageously constitutes a computer-controlled system which makes it possible to maintain the downstream end 323 of the terminal boom 32 by using the operating means 4, or even also to maintain the free end (intended to cooperate with a load) of the elongated lifting member 81 in a determined vertical position.
- the processing means 512 advantageously comprise a mathematical model or algorithm, which determines the control instructions for the maneuvering means 4 which are suitable for stabilizing the downstream end 323 of the terminal boom 32 (even also the control instructions for the drum winch 8, in particular its rotation drive means, which are adapted to vertically stabilize the free end of the elongated lifting member 81 in a determined vertical position) according to the data coming from the movement acquisition module 7.
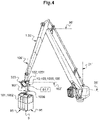
- the knuckle boom crane 1 also advantageously comprises a platform 9 which is secured to the downstream end 323 of the terminal boom 32 via connection means 10.
- Platinum advantageously means a structure intended to receive individuals (generally a cabin) or loads, with a view to transferring them.
- the platform 9 is advantageously suspended from the articulated jib 3 via the connection means 10.
- connection means 10 provide active stabilization of the platform 9 during the movements of the articulated boom 3.
- This active stabilization advantageously occurs at least along a pitch rotation axis (advantageously horizontal) and along a yaw rotation axis (advantageously vertical).
- the platform 9 advantageously defines a landing plane 91 which is advantageously intended to be stable horizontally, advantageously in pitch and in yaw.
- the axis of rotation in yaw 101' and the axis of rotation in pitch 102' advantageously extend in the same plane; the axis of rotation in yaw 101' and the axis of rotation in pitch 102' are preferably concurrent at 90°.
- the actuators 101, 102 advantageously consist of rotary actuators, for example motors, preferably electric motors.
- the active compensation module 51 is advantageously designed to also control the actuators 101, 102 equipping the connection means 10, taking into account data from a movement acquisition module (advantageously equipping the platform 9 ), so as to actively stabilize the platform 9, advantageously in yaw and in pitch.
- the active compensation module 51 is thus structured to control the actuators 101, 102 of the connection means 10 so as to prevent the swings generated by the movements of the articulated boom 3, and in particular of the downstream end 323 of the terminal boom 32.
- the active compensation module 51 thus provides active stabilization of the platform 9 with respect to the movements of the downstream end 323 of the terminal boom 32.
- the active compensation module 51 thus advantageously constitutes a computer-controlled system which makes it possible to stabilize the platform 9 (preventing or compensating for the swings caused by the movement of the articulated jib 3), using the actuators 101, 102 of the connection means 10.
- the actuators 101, 102 of the connection means 10 are controlled by the active compensation module 51 according to the invention so as to stabilize the platform 9, taking into account the information coming from the dedicated movement acquisition module.
- the connecting means 10 comprise a connecting member 105 incorporating the aforementioned actuators 101, 102.
- the assembly of the first end 1051 with the downstream end 323 of the terminal boom 32, on the one hand, and of the second end 1052 with the platform 9, is for example carried out by means of a bearing, by example a plain bearing or a rolling bearing, equipped with actuators 101, 102.
- the connecting member 105 is advantageously secured laterally with the downstream end 323 of the terminal arrow 32.
- the point of intersection between the axis of rotation in yaw 101' and the axis of rotation in pitch 102' is advantageously located at the level of the downstream end 323 of the terminal arrow 32.
- This embodiment has the advantage of keeping the position of the axis of rotation in yaw 101' and of the axis of rotation in pitch 102' at the level of the downstream end 323 of the terminal boom 32.
- connection means 10 comprise damping means 106, advantageously passive, conferring a degree of freedom in translation of the platform 9 with respect to the downstream end 323 of the terminal boom 32.
- the damping means 106 allow clearance between the ends 1051, 1052 of the connecting member 105.
- the damping means 106 thus define a translation axis 106' which is parallel to the yaw axis of rotation 101'.
- the damping means 106 are advantageously attached between the upper section 1055 and the lower section 1056.
- the damping means 106 consist for example of a spring and a visco-hydraulic suspension, to prevent jerky movements of the platform 9.
- the platform 9 consists for example of a cabin adapted to receive at least one individual.
- the reception plane 91 advantageously corresponds to the floor of this cabin.
- the platform 9 advantageously includes at least one passive shock-absorbing member 95 (for example elastomer blocks), suitable for damping contact with the environment.
- passive shock-absorbing member 95 for example elastomer blocks
- the damping member 95 is for example adapted to cooperate with a receiving surface R consisting of a platform carried by the mast of a wind turbine, as illustrated in the figure 6 .
- said at least one shock-absorbing member 95 is advantageously installed at the level of the reception plane 91, for example on at least one side and/or below (for example at the level of an access door 93).
- the platform 9 is advantageously equipped with manual piloting means (not shown), for the manual piloting of the actuators 101, 102 of the connection means 10.
- connection means 10 cooperate by means of removable connection means, integrating electrical and mechanical connection means (in particular for the power supply of the actuators 101 , 102 connecting means 10).
- the removable connecting means are advantageously provided between the downstream end 323 of the terminal arrow 32 and the first (upper) end 1051 of the connecting member 105.
- the connecting member 105 is thus carried by the platform 9, after separation from the downstream end 323 of the terminal arrow 32.
- the platform 9, with its connection means 10, could possibly be adapted to an articulated jib crane other than that according to the invention.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Automation & Control Theory (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Jib Cranes (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR2012580A FR3117099B1 (fr) | 2020-12-03 | 2020-12-03 | Grue à flèche articulée, pour application offshore |
| FR2108433A FR3117100B1 (fr) | 2020-12-03 | 2021-08-03 | Grue à flèche articulée, pour application offshore |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4008679A1 true EP4008679A1 (de) | 2022-06-08 |
| EP4008679B1 EP4008679B1 (de) | 2024-10-23 |
Family
ID=78725396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21211889.7A Active EP4008679B1 (de) | 2020-12-03 | 2021-12-02 | Gelenkauslegerkran für den offshore-einsatz |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11858783B2 (de) |
| EP (1) | EP4008679B1 (de) |
| CN (1) | CN114590721A (de) |
| BR (1) | BR102021024450A2 (de) |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4854800A (en) * | 1984-08-22 | 1989-08-08 | British Aerospace Public Limited Company | Open sea transfer of articles |
| EP2194017A1 (de) | 2008-12-03 | 2010-06-09 | Engineering-Support AS | Offshore-Kran |
| WO2010077302A1 (en) | 2008-12-15 | 2010-07-08 | Oceaneering International, Inc. | Rig supply handler |
| WO2014014343A1 (en) | 2012-07-16 | 2014-01-23 | Itrec B.V. | Marine knuckle boom crane |
| WO2014025253A1 (en) | 2012-08-06 | 2014-02-13 | Itrec B.V. | Crane vessel |
| WO2014200354A1 (en) * | 2012-06-06 | 2014-12-18 | Seaonicas As | Hybrid crane |
| CN204510303U (zh) | 2015-03-16 | 2015-07-29 | 江西蓝翔重工有限公司 | 多臂组合变幅式挖掘钻装一体机 |
| WO2017007320A1 (en) * | 2015-07-07 | 2017-01-12 | Coöperatieve Vereniging Offshore Cooperation U.A. | A method for transporting a person from a first position relative to a watercraft to a second position relative to the watercraft, a device for transporting the person, and a system and a watercraft comprising the device |
| NL2016444B1 (en) * | 2016-03-04 | 2017-09-19 | U-Sea Beheer B V | Disturbance compensating telescopic knuckle boom crane, ship provided therewith and method therefor |
| WO2019190314A2 (en) * | 2018-03-26 | 2019-10-03 | Barge Master Ip B.V. | Offshore crane |
| CN113135506A (zh) | 2021-04-30 | 2021-07-20 | 三一海洋重工有限公司 | 一种液压平衡起重机 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3961713A (en) * | 1974-06-28 | 1976-06-08 | Houston Systems, Inc. | Single line davit |
| NO336245B1 (no) * | 2010-09-21 | 2015-06-29 | Rolls Royce Marine As | Hivkompensert kran |
| EP3318530B1 (de) * | 2016-11-03 | 2020-04-01 | National Oilwell Varco Norway AS | Verfahren zur verbesserung eines gelenkauslegerkrans und kran mit hubkompensation |
-
2021
- 2021-12-02 EP EP21211889.7A patent/EP4008679B1/de active Active
- 2021-12-03 BR BR102021024450-0A patent/BR102021024450A2/pt unknown
- 2021-12-03 CN CN202111467073.8A patent/CN114590721A/zh active Pending
- 2021-12-03 US US17/541,713 patent/US11858783B2/en active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4854800A (en) * | 1984-08-22 | 1989-08-08 | British Aerospace Public Limited Company | Open sea transfer of articles |
| EP2194017A1 (de) | 2008-12-03 | 2010-06-09 | Engineering-Support AS | Offshore-Kran |
| WO2010077302A1 (en) | 2008-12-15 | 2010-07-08 | Oceaneering International, Inc. | Rig supply handler |
| WO2014200354A1 (en) * | 2012-06-06 | 2014-12-18 | Seaonicas As | Hybrid crane |
| WO2014014343A1 (en) | 2012-07-16 | 2014-01-23 | Itrec B.V. | Marine knuckle boom crane |
| WO2014025253A1 (en) | 2012-08-06 | 2014-02-13 | Itrec B.V. | Crane vessel |
| CN204510303U (zh) | 2015-03-16 | 2015-07-29 | 江西蓝翔重工有限公司 | 多臂组合变幅式挖掘钻装一体机 |
| WO2017007320A1 (en) * | 2015-07-07 | 2017-01-12 | Coöperatieve Vereniging Offshore Cooperation U.A. | A method for transporting a person from a first position relative to a watercraft to a second position relative to the watercraft, a device for transporting the person, and a system and a watercraft comprising the device |
| NL2016444B1 (en) * | 2016-03-04 | 2017-09-19 | U-Sea Beheer B V | Disturbance compensating telescopic knuckle boom crane, ship provided therewith and method therefor |
| WO2019190314A2 (en) * | 2018-03-26 | 2019-10-03 | Barge Master Ip B.V. | Offshore crane |
| CN113135506A (zh) | 2021-04-30 | 2021-07-20 | 三一海洋重工有限公司 | 一种液压平衡起重机 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11858783B2 (en) | 2024-01-02 |
| BR102021024450A2 (pt) | 2022-06-14 |
| EP4008679B1 (de) | 2024-10-23 |
| US20220177279A1 (en) | 2022-06-09 |
| CN114590721A (zh) | 2022-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2874827B1 (de) | Achse und fahrzeug mit mindestens einer solchen achse | |
| EP1879827B1 (de) | Schlingenvorrichtung für ein teil mit kraftausgleich und diese umfassendes hubsystem | |
| EP2374635B1 (de) | Achssystem, Achsmodul, das mindestens ein solches Achssytem umfasst und Fahrzeug, das mindestens ein solches Modul umfasst | |
| WO2006048247A1 (fr) | Dispositif elevateur, notamment pour permettre l’acces du personnel de maintenance aux differentes parties d’un avion | |
| FR2668103A1 (fr) | Mecanisme de reglage d'attitude pour appareil de manutention sur camion. | |
| JP2010168147A (ja) | ロープ外れ止め装置 | |
| EP4008679B1 (de) | Gelenkauslegerkran für den offshore-einsatz | |
| FR2956107A1 (fr) | Vehicule elevateur pour le positionnement d'une charge en hauteur | |
| FR3117099A1 (fr) | Grue à flèche articulée, pour application offshore | |
| EP1953112B1 (de) | Hubgerät | |
| EP2761061B1 (de) | Kompaktes dienstmodul und seine verwendung in einer anlage zur herstellung von aluminium durch elektrolyse | |
| EP4049936B1 (de) | System mit einem beweglichen schlitten und verfahren zur anwendung eines solchen systems mit beweglichem schlitten | |
| EP1061034B1 (de) | Selbstangetriebener Wagen mit teleskopischem Arm und Hebungarm | |
| KR102171114B1 (ko) | 차량용 중량물의 상하차용 장치 | |
| FR3015915B1 (fr) | Chassis de vehicule omnidirectionnel comportant des corps de chassis deplacables l'un par rapport a l'autre | |
| EP3842374B1 (de) | Gelenkauslegerkran für den offshore-einsatz | |
| FR2645520A1 (fr) | Structure de levage telescopique pour un engin tel qu'une chargeuse | |
| BE1027203B1 (fr) | Grue de levage et de manutention des charges pourvue de flèche auxiliaire | |
| EP4144918A1 (de) | System zum vorübergehenden aufrechterhalten eines gründungspfahls zur aufnahme des mastes einer offshore-windkraftanlage während der rammarbeiten | |
| FR3105785A1 (fr) | Grue à dispositif de mini pont roulant pour la manutention de composants d’aéronef | |
| FR3128811A1 (fr) | Système de démantèlement pour une installation nucléaire | |
| EP1024108B1 (de) | Vorrichtung zur Umstellungskontrolle einer Tragstruktur eines Wagens | |
| FR2936237A1 (fr) | Grue deployable de manutention d'objets | |
| FR2631377A1 (fr) | Dispositif de secours ou a usage industriel, susceptible d'etre installe sur un chassis de vehicule et engin equipe d'un tel dispositif | |
| FR3079828A1 (fr) | Outil de levage et de transport d'un equipement au sol |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20221206 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230518 |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| INTG | Intention to grant announced |
Effective date: 20240508 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |